42
BAB V
KESIMPULAN DAN SARAN
Pada bab ini akan dipaparkan kesimpulan yang didapat selama perancangan, perealisasian, serta pengujian skripsi. Pada bab ini juga akan dipaparkan beberapa saran yang dapat dipertimbangkan untuk pengembangan skripsi ini.
5.1.Kesimpulan
Berdasarkan perancangan, perealisasian dan pengujian dapat ditarik kesimpulan sebagai berikut:
1. Pengkolaborasian semua mode, yaitu mode blok, mode siaga, mode siap, serta mode kembali sudah dapat dijalankan pada algoritma yang dibuat pada robot kipper saat lomba berlangsung, sesuai dengan spesifikasi pada poin 1.
2. Pada pengujian mode blok, pada bagian algoritma untuk menjauhkan bola menggunakan metode yang baru lebih baik dari metode yang lama, presentase keberhasilannya mencapai 100% bisa menjauhkan bola apabila bola masuk dalam batas jarak di mana robot harus menjauhkan bola, dibandingkan dengan algoritma untuk menjauhkan bola yang lama dengan presentase keberhasilan 75%[9], selebihnya dalam menangkis bola masih sama dengan algoritma yang lama, sesuai dengan spesifikasi pada poin 3.
3. Pada pengujian mode siaga, algoritma lama belum memiliki kemampuan untuk menyesuaikan posisi dari bola, sedangkan algoritma yang baru sudah bisa dengan presentase keberhasilan 100%, sesuai dengan spesifikasi pada poin 2. 4. Pada pengujian mode siap, robot dapat kembali ke tempat semulanya, dengan
presentase keberhasilan 100% apabila robot menerima instruksi dari robot penyerang, yang menunjukan bahwa bola sudah berada jauh di depan, sesuai dengan spesifikasi pada poin 4.
43
6. Metode decision tree tidak dapat diterapkan sepenuhnya, karena ternyata perlu pertimbangan-pertimbangan lain juga dalam menyusun sebuah algoritma yang tepat, namun pada beberapa algoritma juga ternyata perhitungan menggunakan metode decision tree dapat membuat algoritma menjadi lebih efisien, efisien yang dimaksud di sini berarti penulis dapat membuang atribut yang tidak dominan dalam program dan sebenarnya pada waktu atribut tersebut dihilangkan tidak terjadi error pada program serta algoritma lain yang sudah dibuat, sesuai dengan spesifikasi pada poin 7.
5.2.Saran Pengembangan
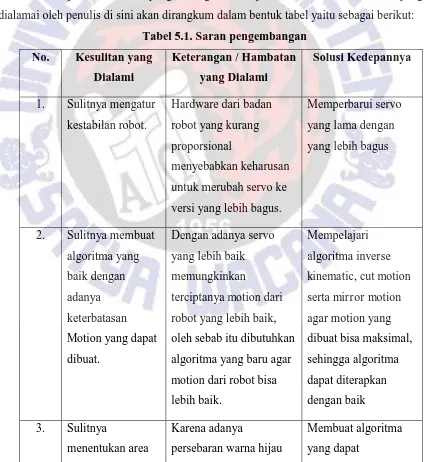
Beberapa saran untuk pengembangan serta permasalahan dan kesulitan yang dialamai oleh penulis di sini akan dirangkum dalam bentuk tabel yaitu sebagai berikut:
Tabel 5.1. Saran pengembangan No. Kesulitan yang
Dialami
Keterangan / Hambatan yang Dialami
Solusi Kedepannya
1. Sulitnya mengatur kestabilan robot.
Hardware dari badan robot yang kurang proporsional
menyebabkan keharusan untuk merubah servo ke versi yang lebih bagus.
Memperbarui servo yang lama dengan yang lebih bagus
2. Sulitnya membuat algoritma yang baik dengan adanya keterbatasan
Motion yang dapat dibuat.
Dengan adanya servo yang lebih baik memungkinkan
terciptanya motion dari robot yang lebih baik, oleh sebab itu dibutuhkan algoritma yang baru agar
motion dari robot bisa lebih baik.
Mempelajari algoritma inverse kinematic, cut motion serta mirror motion agar motion yang dibuat bisa maksimal, sehingga algoritma
persebaran warna hijau
44 yang kosong di
lapangan
yang merata pada pandangan robot
sehingga untuk
mengetahui area kosong pada lapangan untuk mengoper bola sangatlah sulit
memetakkan lapangan agar pembagian warna