TUGAS AKHIR – TE 1415 99
PENGATURAN TEKANAN BOILER-T URBINE
BERBASIS HYBRID FUZZY PID
Anas Al Amin NRP 2212 106 095
Dosen Pembimbing
Ir. Josaphat Pramudij ant o, M. Eng. Eka Iskandar, S. T. , M. T.
JURUSAN TEKNIK ELEKTRO Fakult as Teknologi Indust ri
FINAL PROJECT – TE 141599
BOILER-T URBINE PRESSURE CONT ROL
USING HYBRID FUZZY PID CONT ROLLER
Anas Al Amin NRP 2212 106 095
Advisor
Ir. Josaphat Pramudij ant o, M. Eng. Eka Iskandar, S. T. , M. T.
ELECTRICAL ENGINEERING DEPARTMENT Facult y of Indust rial Technology
Pengaturan Tekanan Boiler-Turbine Berbasis Hybrid Fuzzy PID
Nama : Anas Al Amin
Pembimbing : Ir. Josaphat Pramudijanto, M.Eng. Eka Iskandar, S.T., M.T.
ABSTRAK
Boiler-turbine adalah suatu Pembangkit Listrik Tenaga Uap (PLTU) dalam skala kecil. Permasalahan yang terjadi pada boiler-turbine adalah terdapat ketidakpastian dan pemodelan boiler-turbine menggunakan sistem Multi Input Multi Output (MIMO). Sehingga variabel yang diatur pada boiler-turbine mengalami kesulitan mengikuti sinyal referensi berupa beberapa kondisi titik operasi yang diinginkan. Untuk mengatasi permasalahan tersebut, pada Tugas Akhir ini dibuat model inverted decoupling untuk mengatur konfigurasi plant MIMO dan kontrol Hybrid Fuzzy PID untuk mengatur tekanan boiler-turbine.
Hasil pengujian sistem kontrol dengan simulasi menunjukkan bahwa metode inverted decoupling dapat menghilangkan sifat saling mempengaruhi antar input-ouput pada konfigurasi plant MIMO. Berdasarkan hasil simulasi pengaturan tekanan pada boiler-turbine dengan menggunakan kontroler Hybrid Fuzzy PID, respon yang dihasilkan mampu mengikuti sinyal referensi yang diberikan dengan beberapa pengujian. Pada kondisi tanpa beban diperoleh settling time sebesar 1,80 detik dengan eror steady state 0,003%. Pada kondisi pengujian dengan diberikan gangguan seperti gangguan 7%, rise time diperoleh sebesar 1,76 detik dan settling time diperoleh sebesar 1,96 detik. Kemampuan tekanan drum pada boiler-turbine menerima gangguan mempunyai batasan sebesar 10%.
Kata Kunci : Fuzzy, PID, Hybrid Fuzzy PID, Decoupling, Inverted Decoupling, Boiler-Turbine
Halaman ini sengaja dikosongkan
Boiler-Turbine Pressure Control Using Hybrid Fuzzy PID Controller
Name : Anas Al Amin
Advisor : Ir. Josaphat Pramudijanto, M.Eng.
Eka Iskandar, S.T., M.T.
ABSTRACT
Boiler-turbine is a small scale steam power plant. Nonliniear and multiple input and multiple output system of boiler-turbine are problems that occur in this plant. So variable that is set on t he boiler-turbine having trouble following the reference signal with several conditions desired operating point. To solve that problem, in this research inverted decoupling model made to configure the MIMO plant dan Hybrid Fuzzy PID control to adjust the pressure of boiler-turbine.
The simulation results show that the inverted decoupling method can eliminate the interconnected of the input-ouput on MIMO plant configuration. Based on the simulation results of pressure control on the boiler-turbine using Hybrid Fuzzy PID controller, the output respond is able to follow the reference signal given with some testing. In the no-load condition is obtained settling time of 1.80 seconds with steady-state error of 0.003%. In test conditions with disturbaces such as 7%, rise time of 1.76 seconds was obtained and settling time is obtained by 1.96 seconds.
Keywords : Fuzzy, PID, Hybrid Fuzzy PID, Decoupling, Inverted
Decoupling, Boiler-Turbine
Halaman ini sengaja dikosongkan
KATA PENGANTAR
Puji syukur penulis panjatkan kehadirat Allah Subhanahu Wa Ta'ala atas segala rahmat, pertolongan serta hidayah-Nya sehingga Tugas Akhir ini dapat terselesaikan dengan baik. Shalawat serta salam semoga selalu dilimpahkan kepada Rasulullah Muhammad Shallallahu 'alaihi Wa Sallam yang telah memberikan banyak teladan bagi penulis.
Tugas Akhir ini disusun untuk memenuhi sebagian persyaratan guna menyelesaikan pendidikan Strata-1 pada Bidang Studi Teknik Sistem Pengaturan, Jurusan Teknik Elektro, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember Surabaya dengan judul “Pengaturan Tekanan Boiler-Turbine Berbasis Hybrid Fuzzy PID”.
Penulis mengucapakan terima kasih sebesar-besarnya kepada dua orang teristimewa, Bapak Endang Komarudin dan Ibu Yayat Mulyati. Tugas akhir ini tidak lepas dari do’a, dukungan dan kasih sayang kedua orang tua dan adik-adik penulis. Bapak Josaphat Pramudijanto selaku dosen pembimbing pertama dan Bapak Eka Iskandar selaku dosen pembimbing kedua atas segala bimbingan ilmu dan moral dari awal hingga terselesaikannya Tugas Akhir ini. Teman-teman TSP ITS LJ Genap 2012 tercinta dan seluruh warga elektro yang selalu memotivasi penulis, serta berbagai pihak yang tidak dapat penulis sebutkan satu demi satu.
Penulis menyadari dan memohon maaf atas segala kekurangan pada Tugas Akhir ini. Akhir kata, semoga penelitian ini tidak hanya menjadi syarat untuk mendapatkan gelar Sarjana Teknik, namun berguna bagi pembaca.
Surabaya, Januari 2015
Penulis
Halaman ini sengaja dikosongkan
DAFTAR ISI
Halaman
HALAMAN JUDUL... i
PERNYATAAN KEASLIAN TUGAS AKHIR... iii
ABSTRAK... vii
ABSTRACT... ix
KATA PENGANTAR... xi
DAFTAR ISI... xiii
DAFTAR GAMBAR... xv
DAFTAR TABEL... xvii
BAB 1 PENDAHULUAN... 1
1.1 Latar Belakang... 1
1.2 Perumusan Masalah... 2
1.3 Batasan Masalah... 2
1.4 Tujuan Penelitian... 2
1.5 Sistematika Penulisan... 2
1.6 Relevansi... 3
BAB 2 TEORI PENUNJANG... 5
2.1 Tinjauan Pustaka... 5
2.2 Sistem Boiler-Turbine... 6
2.3 Linierisasi... 7
2.4 Sistem Model Decoupling Proses... 10
2.5 Kontroler PID... 13
2.6 Logika Fuzzy... 14
2.6.1 Himpunan Fuzzy... 15
2.6.2 Fungsi Keanggotaan... 15
2.6.3 Kontrol Logika Fuzzy... 17
2.7 Kontoler Hybrid Fuzzy PID... 20
2.8 Programmable Logic Controller Misubishi Q Series... 21
2.9 Arduino Due... 22
2.10 LabVIEW 2011... 23
BAB 3 PERANCANGAN SISTEM... 25
3.1 Linierisasi Model Matematika Boiler-Turbine Dinamik... 25
3.3 Desain Inverted Decoupling... 29
3.4 Perancangan Kontroler...... 31
3.5 Perancangan Simulasi Boiler-Turbine Plant... 34
3.6 Perancangan Perangkat Lunak... 35
3.6.1 GX Works 2... 35
3.6.1.1 Inisialisasi Modul Q64AD (Analogke Digital)... 37
3.6.1.2 Inisialisasi Modul Q62DA(Digitalke Analog) ... 39
3.6.2 Integrated Development Environment (IDE) Arduino... 41
3.6.3 VirtualPlant dengan Software LabVIEW... 42
BAB 4 SIMULASI DAN ANALISA... 43
4.1 Simulasi Boiler-Turbine... 43
4.2 Simulasi Kontroler PID Boiler-Turbine Menggunakan Decoupling... 45
4.3 Simulasi Kontroler Hybrid Fuzzy PID Pada Tekanan Boiler-Turbine Menggunakan Decoupling... 47
4.4 Pengujian Kontroler Hybrid Fuzzy PID... 47
4.5 Pengujian Decoupling... 51
4.6 Pengujian Program Virtual Plant LabVIEW Boiler-Turbine... 57
BAB 5 PENUTUP... 59
DAFTAR PUSTAKA... 61
LAMPIRAN A... 63
LAMPIRAN B... 73
LAMPIRAN C... 81
RIWAYAT PENULIS... 89
DAFTAR TABEL
Halaman
Tabel 3.1 Rule Base Mack Vicar Whelan... 32
Tabel 4.1 Respon Tekanan DrumBoiler-Turbine... 44
Tabel 4.2 Respon Daya OutputBoiler-Turbine... 44
Tabel 4.3 Respon Perbedaan Level Air Boiler-Turbine... 44
Tabel 4.4 Respon Tekanan Drum dengan Kontroler PID... 46
Tabel 4.5 Respon Daya Output dengan Kontroler PI... 47
Tabel 4.6 Respon Level Air pada Drum dengan Kontroler PI... 47
Tabel 4.7 Respon Tekanan Drum dengan Kontroler Hybrid Fuzzy PID... 48
Tabel 4.8 Karakteristik Respon untuk Pengaturan Tekanan... 51
Halaman ini sengaja dikosongkan
DAFTAR GAMBAR
Halaman
Gambar 2.1 Diagram Skematik Boiler-Turbine Dinamik... 6
Gambar 2.2 Linierisasi 𝑦𝑦=𝑓𝑓(𝑥𝑥) di Sekitar 𝑥𝑥∗... 8
Gambar 2.3 Diagram Blok Sistem Model Boiler-Turbine dengan Decoupling... 10
Gambar 2.4 Matriks Representasi dari Inverted Decoupling... 11
Gambar 2.5 Perbedaan Himpunan Klasik dan Fuzzy... 15
Gambar 2.6 Diagram Blok Kontroler Fuzzy..... 17
Gambar 2.7 Aturan Dasar dalam Bentuk Format Hubungan... 18
Gambar 2.8 Kontrol Hybrid Fuzzy PID... 21
Gambar 2.9 Contoh Bahasa Pemrograman Ladder Diagram... 22
Gambar 2.10 Jendela Front Panel dan Block Diagram... 23
Gambar 3.1 Transfer Function Boiler-Turbine... 28
Gambar 3.2 Desain Inverted Decoupling... 30
Gambar 3.3 Fungsi Keanggotaan Fuzifikasi Sinyal Eror (𝑒𝑒) dan Perubahan Eror (∆𝑒𝑒)... 31
Gambar 3.4 Fungsi Keanggotaan Fuzifikasi Sinyal Kontrol... 32
Gambar 3.5 Skema Kontroler Hybrid Fuzzy PID... 33
Gambar 3.6 Diagram Simulink Boiler-Turbine Plant Secara Keseluruhan... 34
Gambar 3.7 Blok Perancangan Boiler-Turbine... 35
Gambar 3.8 Pembuatan Project Baru... 36
Gambar 3.9 Tampilan GX Work2... 36
Gambar 3.10 Inisialisasi Modul Q64AD... 37
Gambar 3.11 Switch Setting Modul Q64AD... 37
Gambar 3.12 Setting Parameter Modul Q64AD... 38
Gambar 3.13 Auto Refresh Modul Q64AD... 38
Gambar 3.14 Inisialisasi Modul Q62DA... 39
Gambar 3.15 Switch Setting Modul Q62DA... 39
Gambar 3.16 Setting Parameter Modul Q62DA... 40
Gambar 3.17 Auto Refresh Modul Q62DA... 40
Gambar 3.18 Tampilan IDE Arduino... 41
Gambar 3.19 Virtual Plant Tampilan Awal dalam Keadaan Mati.. 42
Gambar 4.1 Respon Tekanan Boiler-Turbine Plant... 43
Gambar 4.2 Respon Daya OutputBoiler-Turbine Plant... 43
Gambar 4.4 Respon Tekanan Drum dengan Kontroler PID... 45
Gambar 4.5 Respon Daya Output dengan Kontroler PI... 46
Gambar 4.6 Respon Perbedaan Level Air pada Drum dengan Kontroler PI... 46
Gambar 4.7 Respon Tekanan Drum dengan Kontroler Hybrid Fuzzy PID... 47
Gambar 4.8 Pengujian dengan gangguansinyal step pada pengaturan tekanan... 48
Gambar 4.9 Respon dengan Gangguan 10%... 49
Gambar 4.10 Respon dengan Gangguan 7%... 49
Gambar 4.11 Respon dengan Gangguan 5%... 50
Gambar 4.12 Pengujian dengan Sinyal Referensi Lebih dari Satu pada Pengaturan Tekanan... 50
Gambar 4.13 Respon Pengaturan Tekanan dengan Sinyal Referensi Lebih dari Satu... 51
Gambar 4.14 Decoupling dengan Gangguan pada Pengaturan Tekanan... 52
Gambar 4.15 Respon Tekanan saat Diberi Gangguan... 53
Gambar 4.16 Respon Daya Output saat Pengaturan Tekanan Diberi Gangguan... 53
Gambar 4.17 Respon Perbedaan Level Air pada Drum Saat Pengaturan Tekanan Diberi Gangguan... 53
Gambar 4.18 Decoupling dengan Gangguan pada Pengaturan Daya Output... 54
Gambar 4.19 Respon Daya Output saat Diberi Gangguan... 54
Gambar 4.20 Respon Tekanan saat Pengaturan Daya Output Diberi Gangguan... 55
Gambar 4.21 Respon Perbedaan Level Air pada Drum saat Pengaturan Daya Output Diberi Gangguan... 55
Gambar 4.22 Decoupling dengan Gangguan pada Pengaturan Level Air pada Drum... 56
Gambar 4.23 Respon Level Air pada Drum saat Diberi Gangguan. 56 Gambar 4.24 Respon Tekanan saat Pengaturan Perbedaan Level Air pada Drum Diberi Gangguan... 57
Gambar 4.25 Respon Daya Output saat Pengaturan Perbedaan Level Air pada Drum Diberi Gangguan... 57
Gambar 4.26 Visualisasi Plant dalam Keadaan Mati... 58
Gambar 4.27 VirtualPlant dalam Keadan Hidup (Running)... 58
Gambar 4.28 VirtualPlant Diberi Gangguan 5 %... 58
Halaman ini sengaja dikosongkan
BAB I
PENDAHULUAN
Bab ini menjelaskan mengenai latar belakang, permasalahan, batasan masalah, dan tujuan dari Tugas Akhir ini. Selain itu, dijelaskan juga sistematika dalam pengerjaan Tugas Akhir serta relevansinya untuk penelitian berikutnya.
1.1
Latar Belakang
Boiler-turbine adalah suatu Pembangkit Listrik Tenaga Uap (PLTU) dalam skala kecil, yang merupakan suatu sistem pembangkit tenaga listrik dengan mengkonversikan energi kimia yang berbahan bakar seperti batu bara, minyak bumi ataupun gas bumi menjadi energi mekanik, dengan memanfaatkan energi kinetik uap untuk menggerakkan poros sudu-sudu turbine. Tujuan boiler-turbine adalah menghasilkan uap yang berasal dari air sungai atau laut yang diproses deminineralized water terlebih dahulu untuk dipanaskan ke dalam boiler sehingga menjadi uap jenuh. Untuk menggerakkan turbine diperlukan uap panas lanjut (uap kering) agar tidak merusak turbine. Alat yang dapat mengubah uap basah menjadi uap kering disebut superheater. Uap yang keluar dari superheater mempunyai tekanan yang sama dengan keluaran boiler, dan mempunyai temperatur lebih tinggi dari boiler [1].
Pemodelan boiler-turbine termasuk kategori sistem nonlinear yang memiliki banyak ketidakpastian. Ketidakpastian tersebut dapat berupa gangguan eksternal, ketidakpastian model, variasi parameter, ataupun error yang muncul pada saat linierisasi. Ketidakpastian-ketidakpastian ini dapat mempengaruhi kestabilan sistem jika tidak diantisipasi oleh sistem kontrol. Selain itu, pemodelan boiler-turbine menggunakan konfigurasi sistem Multi Input Multi Output [2].
Permasalahan yang terjadi pada boiler-turbine adalah terdapat ketidakpastian dan pemodelan boiler-turbine menggunakan konfigurasi sistem Multi Input Multi Output . Sehingga variabel yang diatur pada boiler-turbine mengalami kesulitan mengikuti sinyal referensi berupa beberapa kondisi titik operasi yang diinginkan [3].
Untuk mengatasi permasalahan tersebut, pada Tugas Akhir ini dibuat desain sistem kontrol menggunakan decoupling untuk mengatur konfigurasi plant MIMO dan Hybrid Fuzzy PID untuk mengatur tekanan boiler-turbine. Kemudian plant dan sistem kontrol tersebut
disimulasikan menggunakan software MATLAB. Selanjutnya akan dirancang pengendalian tekanan menggunakan PLC sebagai media kontrolernya dan virtualplant dibuat menggunakan software LabVIEW. Software ini digunakan untuk virtual plant yang seolah-olah menggambarkan proses yang terjadi pada boiler-turbine.
1.2
Perumusan Masalah
Perumusan masalah yang dibahas dalam Tugas Akhir ini adalah terdapat ketidakpastian konfigurasi sistem Multi Input Multi Output (MIMO) pada boiler-turbine. Sehingga variabel yang diatur pada boiler-turbine mengalami kesulitan mengikuti sinyal referensi berupa kondisi titik operasi yang diinginkan. Untuk mengatasi masalah tersebut, dirancang metode inverted decoupling untuk mengatasi konfigurasi plant MIMO, kemudian dirancang kontroler Hybrid Fuzzy PID untuk mengatur tekanan pada boiler-turbine.
1.3
Batasan Masalah
Adapun batasan masalah pada Tugas Akhir ini memiliki ruang lingkup sebagai berikut :
a. Plant yang di jadikan objek penelitian adalah unit boiler-turbine Sydvenska Kraft AB di Malmo, Sweden dengan daya output maksimal sebesar 120MW.
b. Variabel yang dianalisa adalah tekanan drum.
1.4
Tujuan Penelitian
Tujuan yang ingin dicapai dari Tugas Akhir ini adalah bertujuan merancang sistem kontrol menggunakan metode Inverted decoupling pada konfigurasi plant MIMO untuk menghilangkan pengaruh interaksi input-output , sehingga masing-masing input hanya mempengaruhi satu output. Perancangan kontroler Hybrid Fuzzy PID untuk mengatur tekanan boiler-turbine sehingga keluaran tekanan dapat diatur sesuai besar masukan referensi tekanan yang ditentukan.
1.5
Sistematika Pembahasan
Untuk memudahkan pembahasan, maka pada Tugas Akhir ini akan dibagi menjadi lima bab dengan sistematika sebagai berikut:
Bab I : Pendahuluan
Bab ini meliputi latar belakang, permasalahan, batasan masalah, tujuan, sistematika pembahasan, dan relevansi.
Bab II : Tinjauan Pustaka
Bab ini menjelaskan tentang tinjauan pustaka pendahuluan, konsep dasar dari sistem boiler-turbine, teknik linierisasi pada model matematika nonlinear, penggunaan transformasi laplace untuk mengubah matriks liniearisasi menjadi transfer function, penggunaan model inverted decoupling untuk plant dengan konfigurasi MIMO (Multiple Input Multiple Output), penggunaan metode Hybrid Fuzzy PID, penggunaan PLC, penggunaan Arduino, dan penggunaan LabVIEW.
Bab III : Metode Penelitian
Bab ini membahas desain perancangan simulasi boiler-turbine, algoritma kontrol dengan metode Hybrid Fuzzy PID dan perancangan virtual plant proses boiler-turbine. Bab IV : Simulasi Sistem
Bab ini memuat hasil simulasi pada plant. Dari respon simulasi akan diperoleh hasil analisa.
Bab V : Penutup
Bab ini berisi tentang kesimpulan dan saran dari hasil rancangan dan pengujian yang telah diperoleh.
1.6
Relevansi
Hasil yang diperoleh dari Tugas Akhir ini diharapkan menjadi referensi desain kontrol Hybrid Fuzzy PID, pengembangan dan perbandingan metode kontrol serta pengembangan model inverted decoupling yang tepat untuk boiler-turbine dengan konfigurasi MIMO di masa mendatang.
Halaman ini sengaja dikosongkan
BAB II
TEORI PENUNJANG
Bab ini akan membahas mengenai materi dasar dalam penyusunan Tugas Akhir ini. Beberapa hal yang akan dibahas meliputi tinjauan pustaka yang akan membahas mengenai sistem boiler-turbine, linearisasi persamaan nonlinear, teori Fuzzy, model Hybrid Fuzzy PID, PLC Mitsubishi, Arduino Due, dan software LabVIEW.
2.1
Tinjauan Pustaka
Boiler-turbine adalah suatu Pembangkit Listrik Tenaga Uap (PLTU) dalam skala kecil, yang merupakan suatu sistem pembangkit tenaga listrik dengan mengkonversikan energi kimia yang berbahan bakar seperti batu bara, minyak bumi ataupun gas bumi menjadi energi mekanik, dengan memanfaatkan energi kinetik uap untuk menggerakkan poros sudu-sudu turbine. Sebagian besar penelitian mengenai pemodelan matematika untuk boiler-turbine menerapkan pada konfigurasi sistem Single Input Single Output [4]. Pada tahun 1987, Bell dan Astrom memperkenalkan model boiler-turbine yang menerapkan pada konfigurasi sistem Multi Input Multi Output yang merupakan model nonlinear [2]. Model boiler-turbine ini merupakan hasil pengembangan dari penelitian-penelitian [5], [6], dan [7].
Dalam beberapa tahun terakhir, model boiler-turbine yang dikembangkan oleh Bell dan Astrom telah banyak digunakan untuk beberapa penelitian khususnya penelitian di bidang pengaturan. Pada penelitian [8], model boiler-turbine diatur menggunakan kontroler Fuzzy berbasis model Hybrid Fuzzy PID untuk mengatur sistem milling yang digunakan untuk sistem thermal power plant. Di mana berdasarkan simulasi, model Hybrid Fuzzy PID dapat diimplemenetasikan pada model thermal power plant dan mampu mencapai nilai steady state yang diinginkan dengan baik.
Pada Tugas Akhir ini, model Hybrid Fuzzy PID akan diimplementasikan untuk mengatur variabel tekanan drum. Kemudian kontroler PID untuk daya output dan perbedaan level air pada drum. Kontroler ini dirancang agar variabel tekanan drum, variabel daya output dan variabel perbedaan level drum dapat mengikuti sinyal referensi yang diinginkan. Metode decoupling digunakan untuk
menghilangkan pengaruh interaksi input-output, sehingga masing-masing input hanya untuk satu output.
Untuk menguji teori kontrol, sistem nonlinear boiler-turbine ini dievaluasi dengan eksperimen melalui simulasi. Untuk eksperimen, metode kontrol disimulasikan seolah-olah sesuai dengan dengan real plant menggunakan Simulink MATLAB versi R2010a. Virtual plant mekanisme proses boiler-turbine untuk variabel tekanan drum dibuat dengan menggunakan software LabVIEW 2011.
2.2
Sistem
Boiler-Turbine
Model boiler-turbine yang digunakan pada pengerjaan Tugas Akhir ini merupakan sistem nonlinear berbentuk tiga state yang telah dikembangkan dan diteliti oleh Bell dan Astrom pada tahun 1987. Model ini mengatur pengoperasian boiler-turbine saat mempertahankan penekanan pada struktur yang lebih sederhana dan merupakan perluasan model nonlinear berbentuk dua state yang mempresentasikan tekanan drum dan dinamika daya. Penyertaan persamaan penguapan ekstra dan dinamika fluida dapat menyampaikan gambaran tentang dinamika level drum air [3]. Diagram skematik boiler-turbine dinamik ditunjukkan pada Gambar 2.1.
Parameter perhitungan yang digunakan pada boiler-turbine ini berasal dari data dinamis yang diukur dari plant Pembangkit Listrik Tenaga Uap (PLTU) yang berada di Sydvenska Kraft AB daerah dekat Malmo, Swedia. Pembangkit Listrik Tenaga Uap (PLTU) ini berbahan bakar minyak bumi dan dapat menghasilkan daya output maksimal sebesar 120 MW. Meskipun model boiler-turbine ini termasuk sistem orde rendah, model ini mampu menangkap dinamika perilaku utama yang sesuai dengan real plant [3].
BOILER TURBINE
Aliran Feedwater
Kontrol Uap
Daya Output
Level Air Tekanan Drum
µ2
Xw p
Aliran Bahan Bakar
µ3
µ1
Po
Gambar 2.1 Diagram Skematik Boiler-Turbine Dinamik [1]
2.2.1 Model Matematika Boiler-Turbine
State sistem pada boiler-turbine didefinisikan sebagai vektor kolom x=
[
x1 x2 x3]
T, dimana:x1 = tekanan drum(Kg cm⁄ 2), x2 = daya output (MW), x3 = masa jenis fluida (Kg m⁄ 3)
Model matematika dalam bentuk persamaan state dapat dituliskan sebagai berikut [3]:
3
Sebuah sistem nonlinear dapat dicari solusi penyelesaiannya melalui pendekatan model linier. Dalam hal ini, persamaan-persamaan (model) nonlinear pada sistem terlebih dahulu dilinierkan.
Dari hasil linierisasi model, dihasilkan suatu matriks konstanta yang sama dengan suatu sistem kontrol linier untuk setiap daerah kerja, sehingga mempermudah pengontrolan. Dengan linierisasi, akan diperoleh perilaku lokal dari sistem pada daerah kerja nominal dengan menggunakan matriks Jacobi [1].
Gambar 2.2 Linierisasi 𝑦𝑦=𝑓𝑓(𝑥𝑥) di Sekitar 𝑥𝑥∗ [9] Sebuah sistem nonlinear dinyatakan sebagai berikut:
) (x f
x= (2.2)
dengan 𝑦𝑦=𝑓𝑓(𝑥𝑥) merupakan kurva yang ditunjukkan pada Gambar 2.2. Pada titik 𝑥𝑥∗, garis singgung merepresentasikan pendekatan linier 𝑓𝑓(𝑥𝑥) di sekitar titik 𝑥𝑥∗. Hasil linierisasi dari sistem (2.2) dapat dituliskan sebagai berikut:
(𝑓𝑓(𝑥𝑥)− 𝑓𝑓(𝑥𝑥∗)) =𝑓𝑓(𝑥𝑥 − 𝑥𝑥∗) 𝛿𝛿𝑦𝑦=𝑓𝑓(𝛿𝛿𝑥𝑥) =𝑑𝑑𝑓𝑓(𝑥𝑥)
𝑑𝑑𝑥𝑥 �𝑥𝑥=𝑥𝑥∗𝛿𝛿𝑥𝑥
(2.3)
Titik kerja 𝑥𝑥∗ disebut sebagai titik pusat dari hasil linierisasi. Jika titik kerja sistem berada pada origin, dan sistem dilinierisasi pada titik kerjanya, maka 𝑓𝑓(𝑥𝑥∗) = 0, sehingga Persamaan (2.3) menjadi:
𝑓𝑓(𝑥𝑥) = ẋ =𝑑𝑑𝑓𝑓(𝑥𝑥) 𝑑𝑑𝑥𝑥 �𝑥𝑥=𝑥𝑥∗𝑥𝑥
(2.4) Jika pada sistem nonlinear lup terbuka terdapat state sejumlah n, maka linierisasi sistem pada titik kerja (𝑥𝑥1∗, 𝑥𝑥2∗, . . . , 𝑥𝑥𝑛𝑛∗) menjadi sebagai berikut:
𝑓𝑓(𝛿𝛿𝑥𝑥) 𝛿𝛿𝑥𝑥
𝑥𝑥 𝑓𝑓(𝑥𝑥)
(𝑥𝑥∗,𝑓𝑓(𝑥𝑥∗)
�𝑥𝑥̇⋮1
atau dapat ditulis dalam bentuk:
𝐱𝐱̇=𝐀𝐀𝐱𝐱 (2.5) Dengan demikian, sistem nonlinear dapat didekati menjadi sistem linier berdasarkan hasil linierisasi di sekitar titik kerjanya, dengan matriks A sebagai matriks Jacobi dari 𝑓𝑓(𝐱𝐱), dan dapat direpresentasikan dalam Persamaan (2.6) berikut:
𝐀𝐀= matriks transfer function𝐺𝐺(s) yaitu [10]:
𝐺𝐺(s) = C(sI−A)−1B + D (2.9)
2.4
Sistem Model
Decoupling
Proses
Pada model sistem Multiple Input Multiple Output (MIMO), diantara model mempunyai sifat saling mempengaruhi diantara keluarannya. Sistem decoupling digunakan menghilangkan sifat saling mempengaruhi di antara keluarannya [11]. Diagram blok sistem menggunakan decoupling adalah sebagai berikut:
Gambar 2.3 Diagram Blok Sistem Plant dengan Decoupling [12]
Berdasarkan diagram blok Gambar 2.3, didapatkan matriks
Q(s) : diagonal matriks yang diharapkan (dari hasil proses decoupling)
G(s) : matriks fungsi alih D(s) : matriks decoupling 2.4.1 Model Inverted Decoupling
Model inverteddecoupling adalah manipulasi bentuk matriks pada Persamaan (2.10). Bentuk persamaan matriks decoupling-nya adalah:
(s).D(s)
Model sistem inverted decoupling menggambarkan representasi matriks yang ditunjukkan pada Gambar 2.4.
Gambar 2.4 Matriks Representasi dari InvertedDecoupling [13]
Ada n elemen dari decouplerD(s), yang menghubungkan masukan “m” dengan masukan proses “u”, sedangkan 𝐷𝐷0 adalah elemen umpan balik proses input “u” guna men-decoupler sistem [13]. Dari Gambar 2.4, dapat ditulis matriks decouplerD(s) diperoleh sebagai berikut:
1
Matriks fungsi transfer D(s) adalah decoupling konvensional yang berhubungan dengan struktur inverted decoupling sesuai dengan Persamaan (2.13). Nilai inveredecoupler-nya ditulis sebagai berkut:
)
Persaamaan inverting (2.13) disubtitusi ke Persamaan (2.14), menghasilkan:
Persamaan ini digunakan untuk menghitung tiap elemen inverted decoupling. Keuntungan dari inverted decoupling adalah kesederhanaannya, matriks Q(s) yang dipilih untuk menjadi diagonal dan pengurangan yang dihasilkan dari invere Dd(s) dan 𝐷𝐷0(𝑠𝑠) adalah matriks transfer dengan hanya satu elemen yang akan dihitung dalam setiap posisi. Untuk sistem matriks 3 x 3 da ri Persamaan (2.16), dapat ditulis dalam bentuk matriks decoupling-nya sebagai berikut:
33
Untuk konfigurasi sistem matriks inverted decoupler 1-2-3 yaitu elemen Dd(1,1), Dd(2,2) dan Dd(3,3), diperoleh persamaan:
1
Atau dapat ditulis dalam bentuk matriks:
Kontroler merupakan salah satu komponen sistem yang berfungsi mengolah sinyal umpan balik dan sinyal referensi menjadi sinyal kontrol sedemikian rupa sehingga performansi dari sistem yang dikendalikannya sesuai dengan spesifikasi performansi yang diinginkan. Kontroler PID merupakan kontroler feed-forward yang berfungsi mengolah sinyal eror menjadi sinyal kontrol, di mana hubungan sinyal kontrol terhadap sinyal eror dapat proporsional, integral, diferensial atau gabungan diantaranya.
Hubungan sinyal eror dan sinyal kontrol pada kontroler tipe-PID secara umum dapat dinyatakan sebagai pada Persamaan (2.21) [14].
)]
Kontroler tipe PID merupakan gabungan dari ketiga parameter P-I-D dengan memiliki keunggulan dan kekurangan dari masing-masing parameter, dengan melakukan tuning parameter yang tepat akan didapatkan respon kerja terbaik.
2.6 Logika
Fuzzy
Logika Fuzzy pertama kali diperkenalkan oleh Prof. Lotfi Zadeh tahun 1965. Fuzzy yang diperkenalkan oleh Zadeh didasarkan pada teori possibility yang berbeda dari teori probability yang sudah lebih umum dikenal. Teori ini berbeda dengan teori himpunan klasik di mana keanggotaan suatu objek terhadap himpunan dinyatakan dalam dua kondisi absolut, “ya” atau “tidak”. Himpunan seperti ini dikenal dengan himpunan crisp [15].
Teori Fuzzy merupakan koreksi dari logika boolean, yaitu logika True (benar) atau False (salah). Perbedaan mendasar antara logika Fuzzy dengan logika bolean terletak pada harga kebenaran. Pada logika Fuzzy harga kebenaran diberikan dalam terminologi linguistik dengan menyertakan predikat kekaburan (Fuzzyness) pada proposisinya. Harga kebenaran dan derajat kekaburan pada terminologi linguistik dapat dinyatakan dengan tolok ukur, misalnya agak, cukup, sangat dan sebagainya. Logika Fuzzy memungkinkan nilai keanggotaan antara 0 dan 1, tingkat keabuan dan juga hitam dan putih, dan dalam bentuk linguistik, konsep tidak pasti seperti "sedikit", "lumayan", dan "sangat".
Fuzzy secara leksikal mengandung arti tidak jelas, samar atau kabur. Konsep himpunan Fuzzy sebenarnya dilatarbelakangi oleh cara berpikir manusia dalam mempresentasikan dan menganalisa fenomena-fenomena di alam nyata yang serba tidak tepat (samar). Logika manusia dalam memandang suatu fenomena tidak hanya terdiri dari dua nilai, satu atau nol, tetapi merupakan suatu logika banyak nilai yang berangsur-angsur dari nol hingga satu. Dalam teori sistem pengaturan, kata Fuzzy dihubungkan dengan kata logika, sehingga diperoleh kata logika Fuzzy yang berarti suatu logika yang samar. Dengan kata lain,
dalam menentukan fenomena-fenomena di alam yang mengandung sifat tidak tepat atau samar kita tentukan aturan yang samar juga.
Konsep teori himpunan Fuzzy didasarkan pada pengelompokan elemen-elemen ke dalam kelas-kelas yang mempunyai batas yang tidak jelas. Kelompok-kelompok itulah yang disebut himpunan Fuzzy. 2.6.1 Himpunan Fuzzy
Apabila X merupakan semesta pembicaraan dan x adalah elemen X. Himpunan klasik A, didefinisikan sebagai kumpulan elemen atau objek sehingga setiap x dikatakan sebagai anggota himpunan A atau tidak. Seperti terlihat pada Gambar 2.1 7.a terlihat bahwa x dikatakan sebagai anggota A apabila berada pada lingkaran hitam. Himpunan Fuzzy memiliki sifat yang berbeda dengan himpunan klasik. Setiap elemen dinyatakan sebagai anggota himpunan A dengan derajat keanggotaan, sehingga fungsi karakteristik himpunan Fuzzy dapat bernilai antara 0 sampai 1. Rentang nilai inilah yang menyatakan derajat keanggotaan setiap elemen dalam suatu himpunan. Himpunan Fuzzy A dalam X dinyatakan:
A =��x,μA(x)�|x∈X� (2.22) μA(x) menyatakan fungsi keanggotaan (membership function) untuk himpunan Fuzzy A. Fungsi keanggotaan memetakan tiap-tiap elemen x ke derajat keanggotaan antara 0 sampai 1. Pada Gambar 2.17.b terlihat bahwa x memiliki derajat keanggotaan tertentu pada himpunan A. Apabila x terletak semakin ke tengah, derajat keanggotaan x semakin besar. Derajat keanggotaan ini menyatakan tingkat kebenaran bahwa x merupakan anggota dari himpunan A.
a. Himpunan Klasik b. Himpunan Fuzzy Gambar 2.5 Perbedaan Himpunan Klasik dan Fuzzy [15] 2.6.2 Fungsi Keanggotaan
Fungsi keanggotaan himpunan Fuzzy berfungsi untuk menyatakan derajat keanggotaan suatu nilai terhadap suatu himpunan yang berkisar
pada nilai 0 da n 1. Fungsi keanggotaan memiliki berbagai bentuk diantaranya segitiga, trapesium, gaussian, generalized bell dan bentuk-bentuk lainnya. Derajat keanggotaan dinotasikan dengan 𝜇𝜇(𝑥𝑥) dan 𝑥𝑥 menyatakan variabel linguistik.
Fungsi keanggotaan segitiga, disifati oleh parameter{a,b,c} yang didefinisikan pada Persamaan (2.23). Parameter fungsi keanggotaan segitiga ditunjukkan dengan {a,b,c} (dengan a<b<c) yang menentukan koordinat x dari ketiga sudut segitiga tersebut.
Fungsi keanggotaan generalized bell, disifati oleh parameter {a,b,c} yang didefinisikan pada Persamaan (2.26). Parameter b selalu positif, supaya kurva menghadap ke bawah.
b
2.6.3 Kontroler Logika Fuzzy
Kontroler logika Fuzzy adalah suatu proses perhitungan untuk mendapatkan sinyal kontrol yang diinginkan melalui himpunan Fuzzy meliputi Fuzzifikasi, Rule Base, Inferensi dan Defuzzifikasi. Diagram blok kontroler Fuzzy seperti diperlihatkan pada Gambar 2.6.
Fuzzifikasi Inferensi Defuzifikasi
Rule Base
Gambar 2.6 Diagram Blok Kontroler Fuzzy [15] a. Fuzzifikasi
Fuzzifikasi adalah proses pemetaan masukan dan keluaran sistem agar sesuai dengan himpunan Fuzzy. Pemetaan digunakan dengan cara yang disebut fungsi keanggotaan (membership function) Fuzzy sets menyatakan nilai crisp termasuk dalam sebuah nilai linguistik dengan derajat keanggotaan 𝜇𝜇𝑖𝑖𝑗𝑗(𝑥𝑥). Derajat keanggotaan ini didapatkan dengan memetakan input crisp 𝑥𝑥𝑖𝑖 kedalam fungsi keanggotaan tiap-tiap nilai linguistik.
Fuzzy sets dinotasikan dengan 𝐴𝐴𝑖𝑖𝑗𝑗 = {(𝑥𝑥,𝜇𝜇𝑖𝑖𝑗𝑗(𝑥𝑥))|𝑥𝑥𝑖𝑖∈ 𝑋𝑋𝑖𝑖}. Dimana i menyatakan variabel linguistik ke-i dan j menyatakan nilai linguistik ke-j.
b. Basis Aturan (Rule Base)
Aturan dasar Fuzzy adalah kaidah dasar yang berisi aturan-aturan secara linguistik yang menunjukkan kepakaran terhadap plant. Beberapa format umum untuk menunjukan suatu kepakaran dalam aturan:
IF Premise THEN Conclusion
Premis berupa fakta, dengan demikian dari kepakaran dapat diambil kesimpulan. Apabila pernyataannya lebih dari satu maka dapat digunakan logika “AND” atau “OR”. Contoh penggunaan aturan IF-THEN bisa dilihat sebagai berikut:
•IF error is Neg THEN output is NB
•IF error is Zero THEN outpt is Zero
•IF error is Pos THEN output is PB 2. Format Hubungan
Pada dasarnya sama dengan aturan IF-THEN hanya saja tampilannya lebih sederhana karena menggunakan hubungan garis. Contoh dari penggunaan format hubungan dapat dilihat pada Gambar 2.7.
Eror (e)
Gambar 2.7 Aturan Dasar dalam Bentuk Format Hubungan [15] Dimana NB adalah Negative Big, NM adalah Negative Medium, Z dalah Zero, PM adalah Positive Medium, dan PB adalah Positive Big.
3 Format Tabular
Format Tabular lebih sederhana daripada format hubungan, Variabel linguistik berada pada sisi luar dari tabel sedangkan sisi dalam berisi dari keputusannya.
c. Inferensi
Inferensi Fuzzy adalah sebuah proses formulasi pemetaan masukan terhadap keluaran dengan menggunakan logika Fuzzy. Proses dari inferensi Fuzzy melibatkan fungsi keanggotaan operator logika Fuzzy, dan aturan if then. Proses fuzzifikasi dari masing-masing masukan sistem Fuzzy menghasilkan Fuzzy sets yang menyatakan derajat keanggotaan masukan terhadap setiap nilai linguistik dari variabel linguistiknya. Fuzzy sets ini akan diolah pada mekanisme inferensi dengan mengacu pada Rule
Base yang telah didefinisikan. Untuk Rule Base dengan dua premis dibutuhkan operasi Fuzzy sets untuk mendapatkan kesimpulan Fuzzy. Terdapat beberapa operasi yang dapat dilakukan untuk menentukan kesimpulan Fuzzy. Persamaan untuk melakukan operasi Fuzzy dijelaskan sebagai berikut:
1. Interseksi Fuzzy (AND)
Operasi AND melambangkan interseksi dari beberapa Fuzzy sets. Interseksi antara dua buah Fuzzy sets dinotasikan dengan 𝐴𝐴𝑖𝑖𝑗𝑗∩ 𝐴𝐴𝑖𝑖𝑘𝑘. Terdapat beberapa metode melakukan operasi ini, diantaranya:
Minimal, Algebraic Product :
𝜇𝜇𝑖𝑖𝑗𝑗(𝑥𝑥)𝐴𝐴𝐴𝐴𝐷𝐷𝜇𝜇𝑖𝑖𝑗𝑗(𝑥𝑥) = min{𝜇𝜇𝑖𝑖𝑗𝑗(𝑥𝑥),𝜇𝜇𝑖𝑖𝑘𝑘(𝑥𝑥)} (2.27)
Bounded Diff :
𝜇𝜇𝑖𝑖𝑗𝑗(𝑥𝑥)𝐴𝐴𝐴𝐴𝐷𝐷𝜇𝜇𝑖𝑖𝑗𝑗(𝑥𝑥) = maks{0,𝜇𝜇𝑖𝑖𝑗𝑗(𝑥𝑥),𝜇𝜇𝑖𝑖𝑘𝑘(𝑥𝑥)−1} (2.28) 2. Gabungan Fuzzy (OR)
Operasi OR pada dua buah Fuzzy sets dinyatakan dengan notasi 𝐴𝐴𝑖𝑖𝑗𝑗∪ 𝐴𝐴𝑖𝑖𝑘𝑘. Untuk melalukan operasi OR terdapat beberapa fungsi, diantaranya:
Maksimal :
𝜇𝜇𝑖𝑖𝑗𝑗(𝑥𝑥)𝑂𝑂𝑂𝑂𝜇𝜇𝑖𝑖𝑗𝑗(𝑥𝑥) = min{𝜇𝜇𝑖𝑖𝑗𝑗(𝑥𝑥),𝜇𝜇𝑖𝑖𝑘𝑘(𝑥𝑥)} (2.29)
Algebraic Sum :
𝜇𝜇𝑖𝑖𝑗𝑗(𝑥𝑥)𝑂𝑂𝑂𝑂𝜇𝜇𝑖𝑖𝑗𝑗(𝑥𝑥) =𝜇𝜇𝑖𝑖𝑗𝑗(𝑥𝑥) +𝜇𝜇𝑖𝑖𝑘𝑘(𝑥𝑥)−{𝜇𝜇𝑖𝑖𝑗𝑗(𝑥𝑥).𝜇𝜇𝑖𝑖𝑘𝑘(𝑥𝑥)}
(2.30) Bounded Sum :
𝜇𝜇𝑖𝑖𝑗𝑗(𝑥𝑥)𝑂𝑂𝑂𝑂𝜇𝜇𝑖𝑖𝑗𝑗(𝑥𝑥) = min{1,𝜇𝜇𝑖𝑖𝑗𝑗(𝑥𝑥) +𝜇𝜇𝑖𝑖𝑘𝑘(𝑥𝑥)} (2.31) Dari tiap-tiap aturan Fuzzy akan menghasilkan satu kesimpulan Fuzzy. Hal ini mengakibatkan dalam tiap proses pada sistem Fuzzy akan menghasilkan beberapa kesimpulan Fuzzy. Oleh karena itu, dari beberapa kesimpulan Fuzzy tersebut perlu dilakukan proses penggabungan. Proses penggabungan ini disebut dengan proses agregasi. Penggabungan ini akan
membentuk sebuah sistem Fuzzy yang merepresentasikan semua kesimpulan Fuzzy.
d. Defuzzifikasi
Proses untuk mengubah kembali variabel Fuzzy menjadi variabel nyata, atau dangan kata lain aksi pengaturan Fuzzy yang masih berupa himpunan, dirubah menjadi nilai nyata yang berupa nilai tunggal. Beberapa metode yang digunakan dalam proses defuzzifikasi, diantaranya Center of Area (COA), dan Mean of Maximum (MOM).
1. Center of Area:
(2.32)
dimana,
yp= titik puncak dari area membership function aturan ke-p
2. Mean of Maximum:
(2.33)
di mana,
n = jumlah µi yang bernilai maksimal(max(µi)) yn= titik tengah dari membership function dengan µi
2.7
Kontoler
Hybrid Fuzzy PID
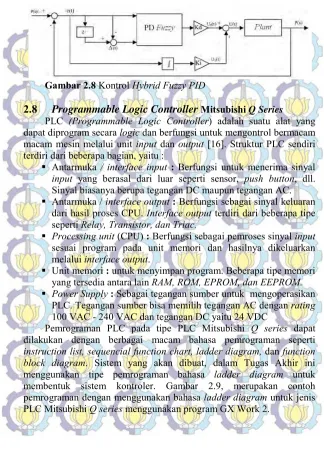
Kontroler Hybrid Fuzzy PID ditunjukkan pada Gambar 2.8, adalah metode pengontrolan yang menggabungkan dua buah kontroler yaitu kontroler Fuzzy PD dan kontroler integrator sehingga dinamakan sebagai Hybrid Fuzzy PID. Kontroler ini memiliki masukan sinyal eror dan sinyal ∆e (perubahan eror), kontroler FuzzyPD akan menghasilkan konstanta derivatif (Kd) melalui proses learning untuk mercepat sistem mencapai keadaan steady state dan tidak berosilasi kemudian kontroler integrator akan menghasilkan konstanta integral (Ki) untuk mempertahankan kondisi steady state tersebut.
Gambar 2.8 Kontrol Hybrid Fuzzy PID
2.8
Programmable Logic Controller
Mitsubishi Q SeriesPLC (Programmable Logic Controller) adalah suatu alat yang dapat diprogram secara logic dan berfungsi untuk mengontrol bermacam macam mesin melalui unit input dan output [16]. Struktur PLC sendiri terdiri dari beberapa bagian, yaitu :
Antarmuka / interface input : Berfungsi untuk menerima sinyal input yang berasal dari luar seperti sensor, push button, dll. Sinyal biasanya berupa tegangan DC maupun tegangan AC.
Antarmuka / interface output : Berfungsi sebagai sinyal keluaran dari hasil proses CPU. Interfaceoutput terdiri dari beberapa tipe seperti Relay, Transistor, dan Triac.
Processing unit (CPU) : Berfungsi sebagai pemroses sinyal input sesuai program pada unit memori dan hasilnya dikeluarkan melalui interfaceoutput.
Unit memori : untuk menyimpan program. Beberapa tipe memori yang tersedia antara lain RAM, ROM, EPROM, dan EEPROM.
Power Supply : Sebagai tegangan sumber untuk mengoperasikan PLC. Tegangan sumber bisa memilih tegangan AC dengan rating 100 VAC - 240 VAC dan tegangan DC yaitu 24 VDC
Pemrograman PLC pada tipe PLC Mitsubishi Q series dapat dilakukan dengan berbagai macam bahasa pemrograman seperti instruction list, sequencial function chart, ladder diagram, dan function block diagram. Sistem yang akan dibuat, dalam Tugas Akhir ini menggunakan tipe pemrograman bahasa ladder diagram untuk membentuk sistem kontroler. Gambar 2.9, merupakan contoh pemrograman dengan menggunakan bahasa ladder diagram untuk jenis PLC Mitsubishi Q series menggunakan program GX Work 2.
Gambar 2.9 Contoh Bahasa Pemrograman Ladder Diagram
2.9 Arduino Due
Arduino Due adalah board mikrokontoler berbasis Atmel SAM3X8E ARM Cortex-M3 CPU. Arduino Due adalah Arduino pertama yang berbasiskan mikrokontroler 32-bit dan berarsitektur ARM. Arduino Due mempunyai 54 pin input/output digital dan 12 diantaranya dapat digunakan sebagai output PWM, 12 input analog, 4 UARTs (port hardware serial), clock 84 MHz, 2 pin DAC (digital ke analog), soket power supply, koneksi USB, 2 TWI, SPI Header, JTAG Header, tombol reset dan tombol hapus program. Spesifikasi Arduino Due adalah sebagai berikut [17]:
Mikrokontroler : AT91SAM3X8E
Tegangan operasi : 3.3 V
Tegangan input (direkomendasikan) : 7-12 V
Tegangan input (batasan) : 6-16 V
Pin I/O digital : 54 (12 output PWM)
Pin input analog : 12
Pin output analog : 2 (DAC)
Arus DC tiap pin I/O : 130 mA
Arus DC untuk pin 3.3V : 800 mA
Arus DC untuk pin 5V : 800 mA
Untuk 54 pin input dan output Arduino Due dapat digunakan dengan fungsi pinMode(), digitalWrite(), dan digitalRead(). Tiap pin memiliki tegangan operasi 3.3 V dan dapat menerima arus maksimum 800 mA. Beberapa pin memiliki fungsi khusus:
Serial 3: 15 (RX) dan 14 (TX), digunakan untuk menerima (RX) dan mengirim (TX) data serial TTL. Pin ini terhubung dengan pin pada Atmega16U2 USB ke cip USB ke TTL serial
PWM: Pin 2 s/d pin 13, menyediakan output PWM 8-bt dengan fungsi analogWrite().
LED: 13, LED ini terhubung dengan pin 13. Ketika pin memiliki nilai LED akan on dan ketika pin memiliki nilai yang rendah, LED akan off
DAC1 dan DAC2, pin ini menyediakan output analog dengan resolusi 12 bit dengan fungsi analogWrite()
Pada Arduino Due terdapat 12 input analog. Setiap pin dapat memiliki resolusi 12 bit (4096 nilai yang berbeda). Untuk kondisi default resolusi pembacaan pin diatur pada 10 bit, hal ini untuk menyesuaikan dengan board Arduino yang telah ada. Pin input analog Arduino Due berupa tegangan dari ground ke 3,3 V, jika lebih dari 3,3 V yang masuk akan merusak chip IC SAM3X.
2.10 LabVIEW 2011
LabVIEW (Laboratory Virtual Instrument Engineering Workbench) merupakan software yang khusus digunakan untuk pemrosesan dan visualisasi data dalam bidang akuisisi data, kendali dan instrumentasi serta otomasi industri. Software ini pertama kali dikembangkan oleh perusahaan National Instrument (NI) pada tahun 1986. Lingkungan pemrograman LabVIEW terdiri dari dua jendela, yaitu front panel dan block diagram. Masing-masing jendela tersebut memiliki toolbar dan palet masing-masing, yaitu toolbar front panel, toolbar block diagram, palet controls, palet fuctions, palet tool, dan control help. Gambar 2.10 menunjukan jendela front panel dan block diagram dari software LabVIEW [18].
Halaman ini sengaja dikosongkan
BAB III
PERANCANGAN SISTEM
Bab ini akan dibahas linierisasi model matematika boiler-turbine dengan titik kerja yang telah ditentukan. Kemudian model transfer function didapatkan dari linierisasi model matematika yang telah didapatkan sebelumnya. Perhitungan model transfer funtion dilakukan dengan menggunakan bantuan function dari MATLAB. Dari model transfer function tersebut, dirancang model inverted decoupling untuk menghilangkan sifat saling mempengaruhi diantara keluarannya. Kemudian dirancang kontroler Hybrid Fuzzy PID untuk tekanan drum, kontrol PI untuk daya output, dan kontrol PID untuk perbedaan level drum. Untuk mencari respon yang diinginkan dilakukan dengan tuning dari diagram blok Simulink/MATLAB yang telah dirancang. Pada akhir bab ini, ditunjukkan perancangan sistem menggunakan Simulink /MATLAB untuk simulasi, implementasi kontroler untuk tekanan drum pada PLC dan visualisasi plant pada LabVIEW.
3.1
Linierisasi Model Matematika
Boiler-Turbine
Dinamik
dengan
Masing-masing elemen matriks A, B, C dan D dapat dilihat pada Lampiran A.2.
Dari penurunan persamaan pada Lampiran A.2 dilakukan linierisasi pada nilai x1, x2, x3, u1, u2, u3 dengan titik kerja yang telah
ditentukan dengan mengacu pada hasil penelitian Vijula [19], yaitu: 𝐱𝐱∗= [143 210 402,759]𝑇𝑇 dan 𝑢𝑢∗= [0,2 0,7 0,4]𝑇𝑇
0,2533 0,6788 −0,014 �(3.6)
Persamaan (3.3) dan (3.6) merupakan model linier dari boiler-turbine dengan titik kerja yang telah ditentukan. Algoritma untuk linierisasi boiler-turbine dapat dilihat pada Lampiran B.1.
3.2
Transfer Function Boiler-Turbine
Bentuk transfer function boiler-turbine sesuai Persamaan (2.9), akan menghasilkan matriks 3x3 yaitu:
Matriks transfer function diperoleh dengan bantuan MATLAB di mana hasil transfer function menggunakan matriks A, B, C dan D yang telah didapatkan pada Bab 3 ba gian 3.1. Hasil perhitungan menggunakan MATLAB menghasilkan transfer function matriks 3x3.
0,2533s2 + 0,006239s + 0,0000202 s2 + 0,0026s
0,6778s2 – 0,007311s – 0,0000011531 s2 + 0,0026s
-0,014s2 + 0,004508s + 0,0000176 s2 + 0,0026s
Gambar 3.1 merupakan bentuk konfiguransi MIMO untuk transfer function dari boiler-turbine. Persamaan (3.7) sampai (3.15) merupakan transfer function boiler-turbine dari matriks linierisasi pada Bab 3 bagian 3.1. Perhitungan untuk transfer function boiler-turbine dapat dilihat pada Lampiran B.1.
3.3
Desain
Inverted Decoupling
Penentuan parameter transfer function decoupling ditentukan berdasarkan dari boiler-turbine pada Persamaan (2.9). Dengan memasukkan nilai matriks transfer function boiler-turbine yang telah didapatkan dari Bab 3 bagian 3.2, didapat persamaan matriks inverted decoupling sesuai Persamaan (2.20) sebagai berikut:
-0,2533s2 - 0,006239s + 0,0000202
-0,014s2 + 0,004508s + 0,0000176
D32
-0,2533s2 + 0,006239s + 0,0000202
-0,014s2 + 0,004508s + 0,0000176
Gambar 3.2 Desain Inverted Decoupling
Gambar 3.2 merupakan bentuk konfigurasi inverted decoupling yang didapatkan dari Persamaan (3.16) sampai (3.21) yang merupakan nilai-nilai inverted decoupling dari transfer function boiler-turbine pada Bab 3 bagian 3.2. Perhitungan untuk inverted decoupling dapat dilihat pada Lampiran B.1.
3.4 Perancangan Kontroler
Pengaturan tekanan boiler-turbine pada sistem ini menggunakan penggabungan metode kontrol PID dan Fuzzy. Struktur Fuzzy yang digunakan adalah struktur Fuzzy PD dengan masukan sinyal eror dan perubahan eror. Eror merupakan selisih nilai referensi tekanan dan nilai aktual tekanan dari boiler-turbine.
Sinyal eror dan perubahan eror, akan diolah dalam tiga tahap Fuzzy yaitu fuzifikasi, inferensi dan defuzifikasi sehingga dihasilkan sinyal kontrol untuk mengatur tekanan plant.
a. Fuzifikasi
Proses ini akan mengubah nilai 𝑒𝑒 dan ∆𝑒𝑒 dalam bentuk crisp menjadi anggota himpunan Fuzzy, dengan pengelompokan sebagai berikut:
NB = Negatif Besar NK = Negatif Kecil SN = Sekitar Nol PK = Positif Kecil PB = Positif Besar
Fungsi keanggotaan yang digunakan adalah fungsi keanggotaan segitiga simetris dengan lima himpunan pendukung. Gambar fungsi keanggotaan yang digunakan dalam perancangan kontroler ditunjukkan pada Gambar 3.3 dan Gambar 3.4.
1 2
-2 -1 0
NB NK SN PK PB
1 2
-2 -1 0
NB NK SN PK PB
∆e e
(a) Sinyal Eror (𝑒𝑒) (b) Sinyal Perubahan Eror (∆𝑒𝑒) Gambar 3.3. Fungsi Keanggotaan Fuzifikasi Sinyal Eror (𝑒𝑒) dan Perubahan Eror (∆𝑒𝑒)
1 2
-2 -1 0
NB NK SN PK PB
u
Gambar 3.4 Fungsi Keanggotaan Fuzifikasi Sinyal Kontrol b. Rule Base
Setelah nilai 𝑒𝑒 dan ∆𝑒𝑒 dikonversi menjadi nilai yang menyatakan anggota himpunan Fuzzy, anggota himpunan tersebut akan digunakan untuk menarik keputusan sinyal kontrol yang akan digunakan untuk menangani eror. Rule Base yang digunakan dalam perancangan sistem ini adalah dalam bentuk Mack Vicar Whelan dengan lima anggota himpunan yang ditunjukkan pada Tabel 3.1.
Tabel 3.1. Rule Base Mack Vicar Whelan 𝑒𝑒
∆𝑒𝑒 NB NK SN PK PB
NB NB NB NK NK SN
NK NB NK NK SN PK
SN NK NK SN PK PK
PK NK SN PK PK PB
PB SN PK PK PB PB
Deskripsi linguistik dari fungsi keanggotaan input dan output adalah Negatif Besar (NB), Negatif Kecil (NK), Sekitar Nol (SN), Positif Kecil (PK) dan Positif Besar (PB) sehingga didapatkan 25 buah kaidah yang berbentuk seperti berikut:
k k k
1 1 2 2
is AND is is k
IF x A x A then y B
dimana x adalah input dan y adalah output. c. Inferensi
Proses ini adalah proses untuk menarik kesimpulan sinyal kontrol Fuzzy yang akan digunakan, berdasarkan hasil seleksi dari Rule Base. Aturan inferensi yang digunakan adalah aturan
Mamdani, yang mencari nilai maksimum dari sinyal kontrol, sinyal eror minimum dan perubahan eror minimum, dengan Persamaan (3.22) sebagai berikut:
𝑢𝑢𝑓𝑓(𝑘𝑘) = max�𝑢𝑢𝑓𝑓(𝑘𝑘)�, min�𝑒𝑒(𝑗𝑗)�,∆𝑒𝑒(𝑖𝑖) (3.22) d. Defuzifikasi
Keputusan sinyal kontrol yang diperoleh dari proses inferensi adalah berupa nilai linguistik (verbal) sehingga harus diubah menjadi nilai crisp agar dapat diaplikasikan ke plant. Proses defuzifikasi melakukan proses tersebut, dan pada sistem ini metode defuzifikasi yang digunakan adalah metode Mean of Maxima (MOM) dimana untuk mencari nilai titik tengah dari membership function dengan 𝜇𝜇𝑖𝑖 dapat dicari dengan menggunakan Persamaan (2.33).
Struktur Fuzzy yang digunakan adalah struktur PD, maka masukan nilai 𝑒𝑒 dan ∆𝑒𝑒 akan dikalikan dengan gain eror dan gain perubahan eror. Demikian pula hasil defuzifikasi juga akan dikalikan dengan gain kontrol (𝐾𝐾𝑈𝑈) yang nantinya akan digunakan sebagai parameter-parameter tuning untuk menghasilkan respon yang diinginkan.
Penggunaan struktur Fuzzy PD diharapakan dapat mempercepat sistem mencapai keadaan steady state dan tidak berosilasi. Untuk mempertahankan steady state, maka ditambahkan kontrol integrator. Diharapkan kontroler ini juga akan bekerja saat sistem mendapatkan gangguan agar dapat mempertahankan kondisi steady state-nya.
Gambar 3.5. Skema Kontroler Hybrid Fuzzy PID
Gambar 3.5 menunjukkan keseluruhan blok kontroler Hybrid Fuzzy PID. Parameter-parameter gain eror, gain perubahan eror, gain intergrator dan gain kontrol diperoleh berdasarkan tuning hingga mendapatkan hasil sesuai yang diinginkan.
3.5
Perancangan Simulasi
Boiler-turbine
Hasil perancangan boiler-turbine, konfigurasi inverted decoupling, dan kontroler pada pembahasan sebelumnya disusun dan dibuat menjadi sebuah simulasi menggunakan software MATLAB. Simulasi dengan diagram Simulink disusun dari beberapa diagram blok, yaitu blok kontroler Hybrid Fuzzy PID, dua blok kontroler PI, blok inverted decoupling dan blok boiler-turbine.
Blok kontroler Hybrid Fuzzy PID dirancang untuk mengatur tekanan drum. Dua blok kontroler PI masing-masing dirancang untuk mengatur keluaran berupa daya dan level air pada drum. Blok inverted decoupling dirancang untuk menghilangakan pengaruh interaksi input-ouput. Selanjutnya blok yang terakhir adalah blok boiler-turbine, blok ini a dalah blok utama dimana pada blok ini ditunjukkan hasil perancangan boiler-tubine dalam bentuk transfer function yang menjadi salah satu bahan penelitian pada Tugas Akhir ini.
Setelah semua blok dirancang dan dibuat, kemudian blok-blok tersebut disusun dan dihubungkan menjadi satu kesatuan diagram blok sistem kontrol. Diagram Simulink sistem kontrol boiler-turbine ditunjukkan dengan Gambar 3.6.
Gambar 3.6 Diagram Simulink Boiler-Turbine Secara Keseluruhan
3.6
Perancangan Perangkat Lunak
Pada tahap ini dirancang sebuah perangkat lunak dengan menggunakan software GX Works2 yang digunakan untuk membuat ladder diagram untuk PLC. Komunikasi dari PLC menuju Personal Computer (LabVIEW) dengan memanfaatkan Arduino yang difungsikan sebagai interface dan virtual plant dengan menggunakan software LabVIEW. Gambar 3.7 menunjukkan blok perancangan perangkat lunak boiler-turbine, di mana pada PLC akan dibuat ladder diagram kontroler untuk mengontrol tekanan boiler-turbine.
Kontroler
Set
Point +- DAC Plant Output
ADC
ADC
DAC
PLC Arduino Personal Computer(Labview)
Gambar 3.7 Blok Perancangan Boiler-Turbine 3.6.1 GX Works 2
GX Work 2 adalah generasi terbaru dari Mitsubishi Automation untuk konfigurasi dan programming PLC seri FX dan seri Q. Tujuan menggunakan GX Work 2 adalah untuk efisiensi yang maksimum dalam pemrograman. Sebelum membuat program ladder untuk PLC Mitsubishi harus melakukan setup terlebih dahulu dengan langkah–langkah sebagai berikut :
1. Menentukan tipe project yang akan dibuat, untuk tipe project yang digunakan yaitu tipe simple project. Tipe ini digunakan karena pada tipe ini tidak membutuhkan pemrograman function block.
2. Menentukan seri PLC yang digunakan yaitu PLC seri QCPU (Q mode)
3. Menentukan tipe CPU PLC yang digunakan, dan pada perancangan ini menggunakan CPU PLC tipe Q02H / Q02H 4. Menentukan bahasa pemrograman yang digunakan. Bahasa
pemrograman yang digunakan adalah bahasa ladder
Aturan pengalamatan PLC Q series menggunakan sistem bilangan hexadesimal, yaitu sistem bilangan yang mempunyai jumlah bilangan
sebanyak 16, dimulai dari 0, 1,2, 3, 4, 5, 6, 7, 8, 9, A, B, C, D, E, F. Cara pengalamatan PLC Q series, yaitu:
Pengalamatan berdasarkan bilangan hexadesimal.
Pengalamatan dimulai dari slot modul yang terdekat dengan CPU (slot 0).
Tipe pengalamatan bersifat kontinyu, dimana alamat yang sudah digunakan tidak bisa digunakan lagi.
Untuk extension base modul, alamatnya mengikuti alamat terakhir pada main base modul. Modul kosong diberi alamati sebanyak 16 poin.
Gambar 3.8 Pembuatan Project Baru
Gambar 3.8 adalah tampilan ketika akan membuat project baru. Tampilan yang akan muncul setelah mengklik ok dapat dilihat pada Gambar 3.9 dan program siap dibuat.
3.6.1.1 Inisialisasi Modul Q64AD (Analog ke Digital)
Proses setup modul intelligence Q64AD dilakukan untuk mengaktifkan modul Q64AD. Berikut ini adalah langkah–langkah setup modul Q64AD PLC Mitsubishi Q series.
1. Buat newmodule pada intelligent function module yang terletak pada bagian kiri jendela untuk membuat program ladder. Kemudian setting modul Q64AD sama seperti Gambar 3.10. Inisialisasi modul yang digunakan, letaknya di slot berapa dan letak address modul yang digunakan. Tanpa melakukan inisialisasi tersebut modul yang digunakan tidak bisa digunakan sesuai fungsinya.
Gambar 3.10 Inisialisasi Modul Q64AD
2. Lakukan switch setting seperti pada Gambar 3.11. Switch setting dilakukan untuk menginisialisasi masukan dari modul, bisa berupa arus atau tegangan sesuai kebutuhan yang diinginkan.
Gambar 3.11 Switch Setting Modul Q64AD
3. Lakukan setting parameter seperti pada Gambar 3.12. Setting parameter digunakan untuk menginisialisasi channel berapa
yang digunakan pada modul tersebut. Apabila channel yang digunakan adalah channel 1 dan 2 maka channel 1 dan 2 diposisi set enable, sedangkan yang lain diposisi set disable.
Gambar 3.12 Setting Parameter Modul Q64AD
4. Lakukan auto refresh seperti pada Gambar 3.13. Auto refresh digunakan untuk menentukan nilai digital output value dari channel 1 dan channel 2, dimana nantinya data yang dibaca oleh modul Q64AD akan disimpan pada register yang telah ditentukan.
Gambar 3.13 Auto Refresh Modul Q64AD
Modul AD yang digunakan bekerja pada range 0 – 5 Volt yang nantinya akan diproses oleh PLC menjadi nilai digital 0 –
4000, dan ketika semua langkah sudah dijalankan, maka modul Q64AD siap untuk digunakan.
3.6.1.2 Inisialisasi Modul Q62DA(Digital ke Analog)
Proses mengaktifkan modul Q62DA sebelumnya harus melakukan setup untuk modul intelligence Q62DA seperti pada modul Q64AD. Berikut ini adalah langkah–langkah setup modul Q64AD PLC Mitsubishi Q series.
1. Buat new module pada intelligent function module yang terletak pada bagian kiri jendela untuk membuat program ladder. Kemudian setting modul Q62DA sama seperti Gambar 3.14.
Gambar 3.14 Inisialisasi Modul Q62DA
Setting parameter dilakukan untuk inisialisasi modul yang digunakan, letaknya di slot berapa dan letak address modul yang digunakan. Tanpa melakukan inisialisasi tersebut modul yang digunakan tidak dapat digunakan sesuai fungsinya. 2. Lakukan switch setting seperti pada Gambar 3.15.
Switch setting dilakukan untuk menginisialisasi keluaran dari modul, bisa berupa arus atau tegangan sesuai kebutuhan yang diinginkan.
3. Melakukan setting parameter seperti pada Gambar 3.16.
Gambar 3.16 Setting Parameter Modul Q62DA
Setting parameter digunakan untuk menginisialisasi channel berapa yang digunakan pada modul tersebut. Apabila channel yang digunakan adalah channel 1 dan 2 maka channel 1 dan 2 diposisi set enable.
4. Melakukan auto refresh seperti pada Gambar 3.17.
Gambar 3.17 Auto Refresh Modul Q62DA
Auto refresh digunakan untuk menentukan nilai digital output value dari channel 1 dan channel 2, dimana nantinya data yang akan dikonversikan dari nilai digital 0 – 4000 akan disimpan ke dalam register yang sudah ditentukan dan selanjutnya data akan dikelola pada range 0–5 Volt.
3.6.2
Integrated Development Environment
(IDE) Arduino
Gambar 3.18 Tampilan IDE Arduino
Pada perancangan program Arduino dihubungkan dengan LabVIEW menggunakan software yang terdapat pada Arduino.Pada Tugas Akhir ini, Arduino difungsikan sebagai interface sekaligus I/O, komunikasi serial, pengaturan LCD, pembacaan data untuk melakukan perintah ketika Arduino menerima informasi dari LabVIEW. Gambar 3.18 adalah tampilan untuk lingkungan pemrograman Arduino yang disebut juga dengan IDE (Integrated Development Environment).
3.6.3
Virtual
Plant
dengan
Software
LabVIEW
Virtual merupakan salah satu sarana penghubung antara manusia dengan mesin. Output sistem perlu ditampilkan kepada pengguna. Oleh karena itu dirancang sebuah virtual boiler-turbine melalui software
LabVIEW. Referensi rancangan virtual plant mengambil contoh dari pembahasan tentang coal fired power plant [20]. Tampilan virtual plant yang telah dirancang melalui perangkat lunak LabVIEW dapat dilihat dalam Gambar 3.19.
Gambar 3.19 Virtual Plant Tampilan Awal dalam Keadaan Mati
BAB IV
SIMULASI DAN ANALISIS
Pada Bab ini dibahas mengenai simulasi dari hasil perancangan yang telah dibuat pada Bab 3. Setelah dilakukan simulasi kemudian dilakukan analisis terhadap data hasil simulasi apakah sesuai dengan tujuan penelitian.
4.1 Simulasi
Boiler-Turbine
Pada pengujian ini kontroler tidak diterapkan, di mana pada tahapan simulasi ini dilakukan dengan memberikan sinyal referensi yang telah ditentukan untuk mengetahui respon tekanan dari hasil perancangan boiler-turbine sesuai pembahasan perancangan pada Bab 3 bagian 3.2. Gambar 4.1, Gambar 4.2 dan Gambar 4.3 merupakan hasil respon tekanan, daya output dan level air pada drum dengan masukan referensi yang telah ditentukan.
Gambar 4.1 Respon Tekanan Boiler-Turbie
Gambar 4.2 Respon Daya OutputBoiler-Turbine
![Gambar 2.1 Diagram Skematik Boiler-Turbine Dinamik [1]](https://thumb-ap.123doks.com/thumbv2/123dok/1806750.2099361/22.420.50.375.93.504/gambar-diagram-skematik-boiler-turbine-dinamik.webp)

![Gambar 2.3 Diagram Blok Sistem Plant dengan Decoupling [12]](https://thumb-ap.123doks.com/thumbv2/123dok/1806750.2099361/26.420.49.376.68.505/gambar-diagram-blok-sistem-plant-dengan-decoupling.webp)
![Gambar 2.4 Matriks Representasi dari Inverted Decoupling [13]](https://thumb-ap.123doks.com/thumbv2/123dok/1806750.2099361/27.420.48.384.67.508/gambar-matriks-representasi-dari-inverted-decoupling.webp)
![Gambar 2.5 Perbedaan Himpunan Klasik dan Fuzzy [15]](https://thumb-ap.123doks.com/thumbv2/123dok/1806750.2099361/31.420.47.373.78.504/gambar-perbedaan-himpunan-klasik-dan-fuzzy.webp)
![Gambar 2.6 Diagram Blok Kontroler Fuzzy [15]](https://thumb-ap.123doks.com/thumbv2/123dok/1806750.2099361/33.420.48.373.69.526/gambar-diagram-blok-kontroler-fuzzy.webp)
![Gambar 2.7 Aturan Dasar dalam Bentuk Format Hubungan [15]](https://thumb-ap.123doks.com/thumbv2/123dok/1806750.2099361/34.420.48.372.72.530/gambar-aturan-dasar-bentuk-format-hubungan.webp)