PENGENDALIAN PAYLOAD KORINDO DENGAN MODUL RF YS-1020
BERBASIS MIKROKONTROLLER AVR ATMEGA 32
Naskah Publikasi
diajukan oleh
EKO RIYADI
07.11.1711
kepada
SEKOLAH TINGGI MANAJEMEN INFORMATIKA DAN KOMPUTER
AMIKOM
YOGYAKARTA
2011
CONTROL KORINDO PAYLOAD WITH RF YS-1020 MODULE AVR ATMEGA 32 MICROCONTROLLER
PENGENDALIAN PAYLOAD KORINDO DENGAN MODUL RF YS-1020 BERBASIS MIKROKONTROLLER AVR ATMEGA 32
Eko Riyadi
Jurusan Teknik Informatika STMIK AMIKOM YOGYAKARTA
ABSTRACT
Since the revolution of knowledge in several countries in the world, technology is developing faster. So humans are required to actively follow the developments. From the revolutionary era of aviation and space until the era of globalization is changing the human mindset is very different. Included in the case in the field of research telematri and meteorology. So humans are not only working with simple tools, but with a tool - a powerful tool in accordance with the needs of the research. It is quite an impact in the development of space technology in the field.
With science competition is very tight, many researchers have used the tool aids in the form of a rocket containing cargo (payload) in order to work optimally. In completing tasks requiring high accuracy, great energy and a high risk, much-needed tool aids in the form of rocket and its payload. So that can reduce the risk of impact injuries and Achieve maximum results.
Therefore, development should start from the rocket payload in-depth research, for rocket payload can always give more value in the field of space research and aviation.
1 Pendahuluan
1.1 Latar Belakang Masalah
Teknologi saat ini sudah sangat pesat perkembangannya dan tuntutan masyarakat terhadap kebutuhan akan teknologi semakin besar bahkan terkadang tak terkendali. Sudah selayaknya mahasiswa sebagai pelaku dalam penemuan dan penerapan teknologi semakin berlomba-lomba dalam rangka melakukan upaya pengembangan lebih lanjut. Semakin banyak dihadapkan terhadap tantangan yang nyata tentang penerapan teknologi secara tepat guna bagi masyarakat maupun institusi maka semakin banyak pula pengalaman dan pengetahuan baru yang akan diperoleh mahasiswa, dan dengan pengetahuan ditambah pengalaman yang kuat akan melahirkan pemikir sekaligus praktisi yang handal dalam menemukan dan menerapkan teknologi bagi masyarakat luas.
Sejak terjadinya revolusi ilmu pengetahuan di beberapa negara di dunia, perkembangan teknologi berkembang dengan sangat pesat. Sehingga manusia dituntut untuk aktif mengikuti perkembangan yang terjadi. Dari era revolusi penerbangan dan antariksa sampai dengan era globalisasi ini perubahan pola pikir manusia sangat berbeda. Termasuk dalam hal dalam bidang penelitian telematri dan meteorologi. Sehingga manusia tidak hanya bekerja dengan peralatan yang sederhana, melainkan dengan alat – alat yang canggih sesuai dengan kebutuhan penelitian. Hal ini sangat berimbas dalam perkembangan teknologi di bidang antariksa.
Dengan persaingan ilmu pengetahuan yang sangat ketat, berbagai peneliti telah memanfaatkan alat kerja bantu berupa roket yang berisi muatan (payload) agar dapat bekerja secara optimal. Dalam menyelesaikan tugas yang membutuhkan keakuratan yang tinggi, tenaga yang besar dan resiko yang tinggi, sangat dibutuhkan alat kerja bantu berupa Roket beserta payloadnya. Sehingga dapat mengurangi dampak resiko kecelakaan kerja dan Mencapai hasil maksimal.
Oleh karena itu, pengembangan payload Roket harus dimulai dari riset yang mendalam, agar payload roket senantiasa dapat memberikan nilai yang lebih dalam bidang penelitian antarikas dan penerbangan.
1.2 Rumusan Masalah
Berdasarkan latar belakang diatas, penulis merumuskan permasalahan sebagai berikut: “Bagaimana merancang systim dan pengendalian Payload Korindo
dengan Modul YS-1020 berbasiskan mikrokontroler AVR Atmega 32 yang baik Untuk Mendapatkan Sample Data di Udara”
1.3 Batasan Masalah
Agar skripsi ini lebih bertujuan secara mendalam kearah sasaran yang diharapkan, maka penulis memberikan batasan-batasan masalah dalam merancang system Payload Korindo dan pembuatan mengacu pada peraturan Korindo 2010. Ruang lingkup terhadap masalah yang diambil untuk perancangan system Payload Korindo adalah :
1. Menggunakan mikrokontroller ATmega32
2. Payload Roket dikendalikan dengan Modul RF YS-1020 3. Payload Roket adalah sebuah rangkaian elektronik dan sistem akruator robotic utuk telemetri dan meteorologi
4. Fungsi Payload Roket ini adalah untuk pengukuran suhu, tekanan udara, dan kelembapan di udara
5. Bahasa pemrograman yan digunakan adalah Bascom AVR 6. Aplikasi desktop yang digunakan Delphi
7. Energi listrik menggunakan batu baterai 8. Cuaca keadaan baik
9. Peluncuran tidak menggunakan roket
10. Dimensi ruatan roket Diameter : 100 mm Tinggi 200 mm
11. Sistem Operasi untuk menjalan kan Aplikasi Payload Korindo adalah Windows XP
1.4 Tujuan Penelitian
Adapun tujuan dari pembuatan Payload roket ini yaitu mengembangkan pola keilmuan dan membuka wawasan pengetahuan baru mahasiswa untuk membantu keilmuan Indonesia dalam bidang teknologi informatika khususnya dalam bidang penerbangan dan Antariksa. Bagi penulis, penelitian ini merupakan salah satu syarat kelulusan jenjang sarjana untuk jurusan Teknik Informatika pada STMIK AMIKOM Yogyakarta.
1.5 Manfaat Penelitian
Sistem ini diharapkan bisa bermanfaat untuk institusi tertentu atau masyarakat, dan payload roket senantiasa dapat memberikan nilai yang lebih dalam bidang penelitian antarikas dan penerbangan.
Dengan adanya alatini pengambilan sample cuaca yang bagus dapat tercapai dengan mudah dengan bantuan roket cuaca yang didalamnya terdapat payload atau muatan untuk melakukan telematri dan meteorologi.
2 Landasan Teori
2.1 Mikrokontroller Dan Software
2.1.1 Atmega 32
Mikrokontroler AVR 1(Alf and Vegard's Risc processor) standar memiliki arsitektur 8 bit,
dimana semua instruksi dikemas dalam kode 16-bit, dan sebagian besar instruksi dieksekusi dalam 1 (satu) siklus clock. AVR berteknologi RISC (Reduced Instruction Set Computing), sedangkan seri MCS51 berteknologi CISC (Complex Instruction Set Computing). AVR dapat dikelompokkan menjadi empat kelas, yaitu keluarga ATtiny, keluarga ATSOSxx, keluarga ATMega, dan
AT86RFxx. Pada dasamya, yang membedakan masing-masing kelas adalah memori, peripheral, dan fungsinya.
1
Winoto.Andi, 2010 “Mikrokontroller AVR ATmega8/16/32/8535 dan
Pemogramannyadengan Bahasa C pada WinAVR”, Penerbit Informatika Bandung, Halaman
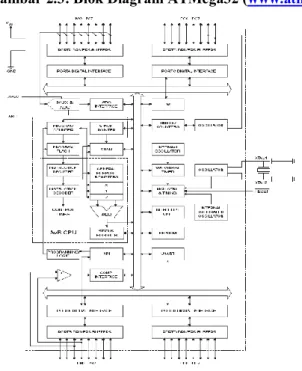
Gambar 2.3: Blok Diagram ATMega32 (www.atmel.com)
Dari gambar tersebut dapat dilihat bahwa ATMega32 2memiliki bagian sebagai berikut:
1. Saluran I/O sebanyak 32 buah, yaitu Port A, Port B, Port C, dan Port D. 2. ADC 10 bit sebanyak 8 saluran.
3. Tiga buah Timer/Counter dengan kemampuan pembandingan. 4. CPU yang terdiri atas 32 buah register.
5. 131 intruksi andalan yang umumnya membutuhkan 1 siklus clock. 6. Watchdog Timer dengan osilator internal.
7. Dua buah timer/counter 6bit, satu buah timer/counter 16 bit. 8. SRAM sebesar 1KB.
9. Memori Flash sebesar 32 kb dengan kemampuan Read While Write. 10. Unit interupsi internal dan eksternal.
11. Port antarmuka SPI.
12. EEPROM sebesar 512 byte yang dapat diprogram saat operasi. 13. Antarmuka komparator analog.
14. Port USART untuk komunikasi serial.
2
Winoto.Andi, 2010 “Mikrokontroller AVR ATmega8/16/32/8535 dan Pemogramannyadengan
Fitur ATMega32 Kapabilitas detail dari ATMega32 adalah sebagai berikut:
1. Memiliki internal EPROM, tidak perlu lagi memakai batere untuk mem-backup isi RAM. 2. Memiliki 8 channel ADC 10 bit.
3. Memiliki internal oscilator, sehingga bisa dikonfigurasikan tanpa Xtal. 4. Ram internal 2kb (bandingkan 89C51 yang hanya 128byte).
5. 32KB EEPROM untuk program (89C51 hanya 4kb).
6. Internal watch dog. Nah ini penting, sehingga bisa mencegah sistem hang. 7. Real Time Counter with Separate Oscillator
8. Brown-out detector, juga mencegah hang.
9. In-system programming, tidak perlu programmer khusus. 10. Four PWM Channels
8-channel, 10-bit ADC 8 Single-ended Channels
7 Differential Channels in TQFP Package Only
2 Differential Channels with Programmable Gain at 1x, 10x, or 200x 11. Byte-oriented Two-wire Serial Interface
12. Programmable Serial USART 13. Master/Slave SPI Serial Interface
14. Programmable Watchdog Timer with Separate On-chip Oscillator
15. On-chip Analog Comparator
2.1.2 Bahasa Pemograman Basic
Basic3 merupakan bahasa tingkat menengah, artinya adalah kemampuan mengakses fungsi – fungsi dan perintah – perintah dasar bahasa mesin. Dalam presepektifnya mudah dipahami manusia, Basic juga bias digolongkan menjadi bahasa tingkat tinggi, namun Basic juga menyediakan kemampuan untuk melakukan operasi bit, operasi byte, pengaksesan memori yang dilakukan oleh bahasa tingkat rendah.
Bila melihat sejarahnya, BASIC adalah bahasa interpreter. Artinya, akan diterjemahkan ke dalam machine code saat program di-eksekusi. Positif-nya, kita bisa memberikan perintah pada command line, dan langsung melihat hasilnya. Negatif-nya, lambat. Namun, sekali lagi, soal cepat atau lambat, tergantung pada kebutuhan. Bila jeda
3
Iswanto, 2008 “Desain dan Implementasi Desain Embeded Mikrokontroler ATMega8535 dengan Bahasa Basic”, Penerbit Gava Media, Yogyakarta, Halaman 43-50
yang terjadi masih dalam batas-batas yang dapat diterima, berarti kelambatan yang terjadi dapat diabaikan.
PBASIC4 dikembangkan oleh Parallax, Inc. untuk mendukung produk mereka, BASIC Stamp. Program yang ditulis dengan PBASIC akan disimpan dalam bentuk token, dalam sebuah EEPROM eksternal, kemudian akan dibaca, diterjemahkan dan di-eksekusi saat program dijalankan. Interpreter BASIC ditanam dalam memori program di dalam chip mikrokontroler yang mereka jual (berbasis PIC atau Ubicom). Dalam penggunaannya, Parallax menjual modul yang terdiri dari mikrokontroler, EEPROM serial, dan komponen pendukung lainnya. Modul ini dapat langsung dihubungkan dengan port serial atau USB komputer, dan melalui BASIC Stamp Editor, kita bisa langsung menggunakannya. Harus diakui, menggunakannya cukup mudah. Hanya saja, kemudahan dan kesederhanaan yang ditawarkan, harus dibayar dengan harga yang lumayan. Referensi dari situs Parallax Inc. menunjukkan harga USD 49 untuk satu modul BASIC Stamp 2, namun untuk versi OEM bisa diperoleh dengan harga sekitar 275 ribu.
BASCOM dikembangkan oleh MCS Electronics, dan merupakan BASIC compiler. Program yang dibuat dalam bahasa BASIC, akan di-kompilasi menjadi machine code, untuk kemudian dimasukkan ke dalam mikrokontroler melalui sebuah programmer. Saat ini, sesuai dengan referensi dari situs web MCS Electronics, BASCOM baru mendukung mikrokontroler keluarga MCS51 (BASCOM-8051) dan keluarga AVR (BASCOM-AVR), keduanya produk dari Atmel Corp.
Beberapa alasan mengapa memakai bahasa basic adalah : a) Basic adalah bahasa yang paling popular saat ini.
b) Basic adalah bahasa pemrograman yang memiliki fleksibilitas c) Basic adalah bahasa yang mudah dipahami
2.1.3 Delphi
Delphi 5adalah sebuah bahasa pemrograman dan lingkungan pengembangan perangkat lunak. Produk ini dikembangkan oleh CodeGear sebagai divisi pengembangan perangkat lunak milik Embarcadero, divisi tersebut sebelumnya adalah milik Borland. Bahasa Delphi, atau dikenal pula sebagai object pascal (pascal dengan ekstensi pemrograman berorientasi objek (PBO/OOP)) pada mulanya ditujukan hanya untuk Microsoft Windows, namun saat ini telah mampu digunakan untuk mengembangkan aplikasi untuk Linux dan Microsoft .NETframework (lihat di bawah). Dengan menggunakan Free Pascal yang merupakan proyek opensource, bahasa ini
4 Iswanto, 2008 “Desain dan Implementasi Desain Embeded Mikrokontroler ATMega8535 dengan
Bahasa Basic”, Penerbit Gava Media, Yogyakarta, halaman 43-50
5
Suyanto Sigit, 2009 “Aplikasi Cerdas Menggunakan Delphi”, Penerbit Wahana computer , semarang, halaman 1-5
dapat pula digunakan untuk membuat program yang berjalan di sistem operasi Mac OS X dan Windows CE
Pada tanggal 8 Februari 2006, Borland mengumumkan akan melepas seluruh jajaran produk pengembangan aplikasi komputernya termasuk di antaranya Delphi. Saat ini Delphi menjadi bagian dari jajaran IDE milik Embarcadero Technologies setelah Embarcadero Technologies mengakuisisi CodeGear, anak perusahaan Borland yang menangani tool pengembangan aplikasi.
2.2 Sensor
2.2.1 SHT 11
Dalam melakukan pengukuran kelembaban dan suhu udara pada PAYLOAD menggunakan piranti SHT11 produksi SENSIRION. SHT11 adalah keping tunggal (chip) mutisensor untuk mengukur kelembaban relatif (RH%) dan suhu yang terdiri dari modul yang sudah dikalibrasi dengan keluaran digital. Dengan menggunakan metode pengolahan CMOSens® untuk memastikan kehandalan dan stabilitas jangka panjang yang sangat baik. Masukan besaran kelembaban dan suhu secara internal akan diolah menggunakan ADC (analog to digital) 14-bit kemudian diproses oleh pengendali dan hasil pengukuran dibaca dengan antarmuka komunikasi data serial pada satu chip yang sama. Hal ini mengakibatkan kualitas sinyal lebih bagus, waktu respon yang cepat dan memiliki kekebalan yang tinggi terhadap gangguan eksternal (EMC).
2.2.2 MPX5050DP
Untuk melakukan pengukuran terhadap tekanan udara yang dialami PAYLOAD digunakan sensor MPX5050 produksi FreescaleTM. Sensor ini merupakan jenis transduser piezoresistive yang menjadi acuan dari sebuah sensor tekanan berbahan silicon monolithic dan didisain untuk jangkauan aplikasi yang luas. Untuk antarmuka dengan mikrokontroler dibutuhkan sebuah ADC (analog to digital converter) untuk membaca besaran tekanan yang terbaca oleh sensor MPX5050.
Disain sensor yang sudah dipatenkan dengan transduser elemen tunggal yang sudah dikombinasikan dengan teknik micromachining tingkat tinggi, pelapisan film logam tipis, pemrosesan bipolar yang menghasilkan output analog yang akurat dan proporsional terhadap tekanan yang dirasakan oleh transduser.
3 Sistem
3.1 Blok Diagram Sistem Payload Korindo
Dalam merancang sistem PAYLOAD baik untuk akuisisi data maupun kendali gerak, harus digambarkan terlebih dahulu menggunakan blok diagram tentang konfigurasi dan sebaran pengkawatan yang akan diterapkan. Hal ini akan sangat membantu dalam mengetahui kelemahan dan pencarian kesalahan jika terjadi kegagalan kerja sistem. Selain itu blok diagram juga akan membantu untuk lebih memahami perancangan sistem yang akan dilakukan. Terdapat berbagai metode antarmuka untuk beberapa perangkat baik sensor maupun aktuator menuju ke pengendali utama berupa mikrokontroler, dan yang perlu diperhatikan adalah pengaturan pewaktuan dalam melakukan antarmuka pada tiap-tiap perangkat oleh mikrokontroler agar tidak terjadi kesalahan pembacaan atau pengendalian perangkat. Pengendali utama berfungsi sebagai inisiator antarmuka, sehingga untuk pembacaan sensor dilibatkan di awal dan di akhir proses dari kerja sensor. Khusus untuk aktuator pengendalian motor baling-baling, dilakukan hanya saat setelah terjadi separasi roket dan antarmuka dilakukan secara kontinyu sesuai dengan posisi yang diinginkan.
3.2 Bord Utama
Board Mikrokontroler ini digunakan untuk meletakan mikrokontroler Atmega 32 dan sebagai tempat inputan voltase dari sumber tegangan maupun pulsa dari sensor dan
kendali motor yang nanti akan diolah dan disalurkan ke motor penggerak dan output data yagn di kirimkan ke groun atau komputer pengendali.
3.3 Rancangan Sistem Mekanis
embuatan perangkat mekanik terdiri dari perancangan desain mekanis yang mendukung aksi gerak payload dan berkarakter sesuai dengan muatan roket KORINDO pada kondisi sesungguhnya. Perancangan ini terdiri dari pengaturan mainboard, sensor, servo sebagai pengerah sirip muatan, YS-1020 sebagai kendali, peletakan sumber daya listrik, kalibrasi sensor untuk mendeteksi suhu di udara. Dalam rancangan mekanis ini terdiri beberapa bagian yaitu :
1. Kerangka Payload Korindo 2. Dimensi Payload Korindo
3.3.1 Kerangka Payload Korindo
Payload ini dirancang agar dapat melaksanakan fungsi – fungsi navigasi dan gerak bebas di udara. Untuk mencapai kondisi di atas, perlu pemilihan bahan baku yang kuat dan tahan terhadap aksi dali luar dan tekanan udara.
Kerangka payload terbuat dari almunium, dengan alasan bahan ini mudah dicari, murah dan kuat secara konstruksi. Untuk menggerakan baling-baling, payload ini menggunakan motor RC, dengan pertimbangan mempunyai RPM yang tinggi. Untuk menggerakan sayap, payload ini menggunakan servo mini. Untuk menarik payload bergerak maju, belok kanan dan kiri.
3.3.2 Dimensi Payload Korindo
Dimensi Payload saat start adalah : Diameter : 100 mm
3.3.3 Struktur material Payload Korindo
a) Kawat las Diameter 5 mmb) Plat Alumunium tebal 2mm c) Akrelik tebal 2 mm
d) Baling-Baling RC e) Motor DC RC
4 Hasil Pengujian
4.1 Bagian Elektronis
Bagian elekntronis sesungguhnya merupakan bagian yang paling rentan terhadap kerusakan dan kesalahan pembuatan. Oleh karena itu agar sistem pengendalian tidak mudah rusak, saya membagi menjadi tiga bagian elektronis ditambah sumber daya listrik.
4.1.1 Boed Mikrokontroller
Rangkaian ini merupakan sebuah boar yang terdapat IC (Integrated Circuit) mikrokontroler, pengubah fase dan regulator. Board ini dipasang di atas dalam. Sebagai “otak” Payload, digunakan mikroprosesor Atmega 32 yang akan membaca pulsa yang diberikan dari sistem sensor kemudian mengirimkan data ke komputer kendali.
Board ini juga digunakan untuk interfacing dengan komputer dan digunakan untuk pengendalian. Dalam board ini terdapat pin untuk menyambungkan ke dalam IC Downloader yang nantinya akan terhubung ke USB Bus di komputer.
4.1.2 Bagian Menanis
Konstruksi bagian mekanik dari Payload Korindo di bentuk sebuah silinder selayaknya sebuah tong dan menggunakan bahan-bahan yang ringan untuk mendapatkan payload dengan beban rendah, gambar dapat dilihat di bawah ini:
4.1.2.1 Kerangka Payload Korindo
Chasis
Chasis merupakan bagian dasar atau bahan baku dari kerangka Payload untuk meletakan komponen elektronika, motor maupun power supply. Chasis terbuat dari Plat alumunium dengan tebal 2 mm dan mempunyai diameter 10 Cm, di mana kedua plat di sambung dengan kawat las 5 mm.
Baling-Baling
Baling-baling berfungsi sebagai penarik payload untuk berjalan kedepan, samping kiri dan kanan, baling-baling ini terdiri dari 1 baling-baling RC dan sebuah motor DC RC untuk memutarnya. Panjang baling-baling ini 18 Cm dengan panjag 18 cm dengan motor dc RPM tinggi dapat mengasilkan gaya dorong yang kuat untuk menggerakkan payload di udara.
Sirip
Sirip digunakan untuk mengatur gerakan payload di udara, dan sirip ini terbuat dari acrelik yang tebalnya 1,5 mm, dan penggerak sirip menggunakan servo mini.
5 Kesimpulan
5.1 Kesimpulan
Dari beberapa tahap perancangan, pembuatan dan pengujian yang telah dilakukan dapat diambil kesimpulan antara lain :
1. Mekanik payload korindo dapat bekerja dengan baik tanpa ada kendala, dari mekanik yang berdimensi panjang 10 Cm dan tinggi 20 cm masih dapat menata bord utama, batrei, sensor-sensor, modul RF, motor driver, dan kipas. Dari penataan yang penulis lakukan motor kipas bekerja sesuai dengan fungsinya. Servo yang menjadi arah
gerak payload mampu mengarahkan payload dengan sirip berukuran 15 X 5 cm dan tebal 1mm.
2. Mikrokontroller dan elektronika yang berada pada payload korindo dengan desain yang kecil atau ringkas dapat bekerja normal, mikrokontroller dapat mengirim data dan menerima data untuk berkomunikasi dengan komputer kendali.
3. Pemrograman mikrokontroller yang menggunakan bahasa pemograman Basic dengan software Bascom Avr mudah untuk di pahami, dan hasil dari pemograman bascom avr yang di downloadkan ke mikrokontroller. Menjadikan mikrokontroller bekerja dengan baik tanpa ada kerusakan data, dan mikro dapat melakukan intruksi-intruksi yang penulis berikan.
4. Dari aplikasi yang dibuat menggunakan delphi, dimana delphi merupakan turunan dari pascal dan IDE (Integrated Development Environment) atau lingkungan pengembangan aplikasi sendiri adalah satu dari beberapa keunggulan delphi, didalamnya terdapat menu – menu yang memudahkan kita untuk membuat suatu proyek program. Dari keunggulan delphi untuk antarmuka hardware penulis dapat menyelesaikan sebuah aplikasi yang bisa berjalan dengan baik, yaitu dapat menampilkan data dari mikrokontroller yang berkomunikasi menggunkan sinyal RF dan dapat mengendalikan payload korindo.
5. Dari kesluruhan sistem dan kendali pengambilan sample data di udara dapat dipengaruhi beberapa hal:
a) Tempat, karena tempat memungkin data dapat berubah dengan signifikan. Apabila sample data di ambil di daerah pegunungan, bibir pantau ataupun di tengah kota. Data yang akan di dapat pasti berbeda- beda karena ketiga tempat tersebut mempunyai karakteristik
sendiri-sendiri.
b) Cuaca, mengapa cuaca mempengaruhi karena cuaca yang buruk akan menjadikan data yang di dapat kurang akurat, untuk pengambilan data yang baik cuaca harus dalam keadaan normal atau cerah.
c) Ketinggian karena suhu, kelembapan, dan tekana akan berbeda di antara permukaan tanah dengan ketinggian tertentu.
5.2 Saran
Dalam pembuatan Pengendalian Payload Korindo penulis memberi saran-saran pengembangan lebih lanjut untuk mencapai sistem pengendalian payload dan komuniasi yang lebih sempurna:
1. Modul RF Korindo dapat dikembangkan lagi dengan modul wi-fi sehingga jarak jangkauan komunikasi maksimal.
2. Sensor suhu yang penulis gunkana menggunakan SHT11 dan dapat di kembangkan lagi dengan menggunkan SHT75 yang pembacaannya lebih akurat dan hampir sempurna, namun untuk SHT75 harganya relatif mahal dan sensor lebih kecil.
3. Desain mekanik dapat di sempurnakan menggunkan 1 sirip, untuk menggunakan 1 sirip penulis menyarankan untuk membuat instrumen elektronika baru untuk menghasilkan desain PCB yang lebih mini atau kecil.
Daftar Pustaka
Budiarto. Widodo, 2004 “interfacing Komputer dan Mikrokontoler”, Penerbit Elex Media Komputindo
H.M.Jogiyanto, 1994 “Teori dan Aplikasi Program Komputer Bahasa BASIC untuk IBM dan Kompetibelnya”
Iswanto, 2008 “Desain dan Implementasi Desain Embeded Mikrokontroler ATMega8535 dengan Bahasa Basic”, Penerbit Gava Media, Yogyakarta
________, 2008 ”Antarmuka Port Paralel dan Port Serial dengan Delphi 6 Compatible Sistem Operasi Windows”, Penerbit Gava Media, Yogyakarta
Suyanto Sigit, 2009 “Aplikasi Cerdas Menggunakan Delphi”, Penerbit Wahana Computer , semarang
Widodo Budhi Romy, Irawan Dedy Josep, 2007 ” Interfacing Paralel dan Serial Menggunakan Delphi”, PenerbitGraha Ilmu, Yogyakarta
Winoto.Andi, 2010 “Mikrokontroller AVR ATmega8/16/32/8535 dan
Pemogramannya dengan Bahasa C pada WinAVR”, Penerbit Informatika, Bandung