BERDASARKAN TINGGI DAN BERAT BADAN
Diajukan untuk memenuhi salah satu syarat memperoleh gelar Sarjana Teknik pada
Program Studi Teknik Elektro
Disusun oleh: SUKUR WIDODO
NIM: 035114041
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
2008
BASED ON THE HEIGHT AND THE WEIGHT
Presented as Partial Fullfilment of the Requirment To Obtain The Technical Engineering Degree
In Electrical Engineering
written by : SUKUR WIDODO Student Number: 035114041
ELECTRICAL ENGINEERING STUDY PROGRAM
SAINS AND TECHNOLOGY FACULTY
SANATA DHARMA UNIVERSITY
2008
LEMBAR PERSETUJUAN
TUGAS AKHIR
THE HUMAN BODY SHAPE PREDICTING DEVICE
BASED ON THE HEIGHT AND THE WEIGHT
THE HUMAN BODY SHAPE PREDICTING DEVICE
BASED ON THE HEIGHT AND THE WEIGHT
28 Agustus
Saya menyatakan dengan sebenarnya bahwa skripsi yang saya tulis ini tidak
memuat karya atau bagian karya orang lain, kecuali yang telah disebutkan dalam
kutipan dan daftar pustaka, sebagaimana layaknya karya ilmiah.
Yogyakarta, 22 Juli 2008
Penulis
Sukur Widodo
“Masa depan memang punya resiko, tapi aku harus terus maju”
“Maknai hidupmu karena hidup yang tidak bermakna adalah
kehidupan yang tidak pantas untuk dihidupi”
“Hidup itu indah. Orang yang bahagia tidak perlu memiliki yang
terbaik dari segala hal. Mereka hanya membuat segala hal yang
datang dalam hidup mereka. Kebahagiaan adalah bohong bagi
mereka yang menangis, mereka yang terluka, mereka yang mencari,
mereka yang mencoba, mereka hanya bisa menghargai orang-orang
yang penting yang telah menyentuh hidup mereka”
PERSEMBAHAN
Tugas akhir ini kupersembahkan untuk Tuhan Yesus, BundaMaria, bapak, ibu, keluarga serta teman-teman yang telah
memberikan doa dan semangat.
Dalam penelitian ini dibuat suatu alat pendeteksi bentuk tubuh seseorang
berdasarkan tinggi dan berat badan dengan menggunakan rumus Indeks Massa
Tubuh (IMT) .
Pendeteksi bentuk tubuh menggunakan dua sensor yaitu sensor tinggi
yang digerakan oleh motor DC dan sensor berat. Unit antarmuka digunakan
beberapa rangkaian seperti pengkondisi sinyal dan pengubah analog ke digital
(ADC), kemudian data akan diproses oleh mikrokontroler AT98S51 untuk
dikirimkan ke komputer melalui komunikasi serial. Hasil tinggi dan berat badan
ditampilkan menggunakan program visual basic.
Pendeteksi bentuk tubuh telah berhasil dibuat dan dilakukan pengujian.
Hasil dari penelitian ini terdiri dari data tinggi dan berat badan serta keterangan
bentuk badan. Tetapi nilai IMT yang ditampilkan pada program pendeteksi bentuk
tubuh lebih kecil dari nilai IMT sebenarnya sehingga bentuk tubuh yang
ditampilkan tidak sama dengan bentuk badan sebenarnya.
Kata kunci : Mikrokontroler AT89S51, Sensor tinggi, Sensor berat, Visual
basic, Pendeteksi bentuk tubuh
on the height and the the weight with Body Mass Index (BMI).
Body shape predicting using two sensors which are height sensor who
work using DC motor and weight sensor. The interface unit use several
processing circuit such as signal conditional and analog to digital converter
(ADC). The data will be processed by AT89S51 microcontroller for be sent to the
computer by serial communication. The height and weight result will be displayed
by using visual basic program.
Body shape predicting was succes created and tested. The result from this
research are contain of height data, weight data, also the body shape information.
But the BMI value that displayed in the body shape predicting program is smaller
than the real BMI value. That’s means the body shape that displayed isn’t same
the real body shape.
Keyword: AT89S51 Microcontroller, Height sensor, Weight sensor, Visual
basic, Body shape predicting
Yang bertanda tangan dibawah ini, saya mahasiswa Universitas Sanata Dharma :
Nama : Sukur Widodo
Nomor Mahasiswa : 035114041
Demi pengembangan ilmu pengetahuan, saya memberikan kepada Perpustakaan
Universitas Sanata Dharma Karya Ilmiah saya yang berjudul :
ALAT PENDETEKSI BENTUK TUBUH SESEORANG
BERDASARKAN TINGGI DAN BERAT BADAN
beserta perangkat yang diperluan (bila ada). Dengan demikian saya memberikan
kepada Perpustakaan Universitas Sanata Dharma hak untuk menyimpan,
mengalihkan dalam bentuk media lain, mengelolanya dalam bentuk pangkalan
data, mendistribusikan secara terbatas dan mempublikasikannya di Internet atau
media lain untuk kepentingan akademis tanpa perlu meminta ijin dari saya
maupun memberikan royalty kepada saya selama tetap mencantumkan nama saya
sebagai penulis.
Demikian pernyataan ini saya buat dengan sebenarnya.
Dibuat di Yogyakarta
Pada tanggal : 25 Agustus 2008
Yang menyatakan
(Sukur Widodo)
karena hanya berkat dan bimbingan-Nya penulis bisa menyelesaikan tugas akhir
ini. Dengan usaha yang keras dan diiringi doa yang tiada henti juga atas bantuan
semua pihak maka skripsi ini dapat diselesaikan.
Dengan selesainya tugas akhir yang merupakan salah satu syarat untuk
meraih gelar Sarjana pada jurusan Teknik Elektro Fakultas Teknik Universitas
Sanata Dharma Yogyakarta, penulis mengucapkan terima kasih yang sebesar -
besarnya kepada:
1. B.Wuri Harini, S.T., M.T. selaku Dosen pembimbing I atas segala
pemikiran dalam membimbing, ide, tenaga dalam menyelesaikan skripsi ini,
serta kesabaran dan sarana yang sangat penulis perlukan untuk
menyelesaikan tugas akhir ini dari awal hingga selesai.
2. Orang tua tercinta Bapak Matius Sunardi dan Ibu Chatarina Sumini. Terima
kasih atas segalanya, perhatian, dukungan untuk terus maju, cinta dan
kesabaran dalam mendidik penulis.
3. Kakakku mas Alex dan mas Anton serta adikku tersayang Ratna yang selalu
memberikan semangat dan kasih sayang kepadaku.
4. Teman-teman seperjuangan: Wisnu (TE’03), Hardi (TE’03), Dedy
(Akakom), Dche (TE’03), Ika (TE’03), Anna (TE’04).
5. Teman-teman semua: Pak Toni sebagai kepala suku, Gussur yang sudah
menemani kerja lembur, Rendi yang membantu membawakan alat ke
laboratorium, Lukas yang telah membantu dalam mengerjakan program
dalam segala hal, Vivi,Urpa dan Tika yang sudah meminjamkan timbangan.
6. Semua saudaraku di FKMKKP dan para Flater di kentungan yang telah
menopangku sehingga aku kuat untuk berjalan kedepan.
7. Laboran teknik elektro: Mas Broto, Mas Suryono, pak Djito dan semua staf
sekretariat Fakultas Teknik.
Penulis menyadari bahwa dalam penulisan tugas akhir ini masih
banyak kekurangan, kelemahan dan jauh dari sempurna. Oleh sebab itu
penulis dengan kerendahan hati mengharapkan kritik dan saran yang
membangun untuk penyempurnaan tugas akhir ini.
Yogyakarta, 19 Juli
2008
Penulis
(Sukur widodo)
HALAMAN PENGESAHAN... iiI
HALAMAN KEASLIAN ... iv
HALAMAN MOTO DAN PERSEMBAHAN ...v
INTISARI... vi
ABSTRACT... vii
LEMBAR PERSETUJUAN PUBLIKAS ... viii
KATA PENGANTAR ... ix
DAFTAR ISI... xi
DAFTAR GAMBAR ...xv
DAFTAR TABEL... xviii
DAFTAR PUSTAKA ... xix
BAB I. PENDAHULUAN 1.1. Latar Belakang...1
1.2. Perumusan Masalah ...2
1.3. Batasan Masalah ...2
1.4. Tujuan Penelitian ...2
1.5. Metodologi Penelitian...3
1.6. Sistematika Penulisan ...3
BAB II. DASAR TEORI 2.1. Indeks Massa Tubuh (IMT) ...5
2.2. Laser pointer ...6
2.3. Sensor optik...7
2.4 Komparator ...7
2.5 Penggerak motor DC...8
2.6 Rangkaian pembagi tegangan ...9
2.10 Pengubah Analog ke Digital (ADC) ...12
2.11 Strain gauge sensor...15
2.12 Jembatan Wheatstone...16
2.13 Mikrokontroler AT89S51 ...17
2.14 Komunikasi serial...23
2.15 Konfigurasi Port serial...25
2.16 Pengubah level TTL kelevel Serial ...28
2.17 Visual basic...29
2.17.1 Menu Bar...30
2.17.2 ToolBar...31
2.17.3 Tool Box...31
2.17.4 Context Menu...32
2.17.5 Jendela properties...32
2.17.6 Jendela form layout...32
2.17.7 Object Browser...33
2.17.8 Jendela Code Editor...34
2.17.9 Jendela Project Explorer...34
BAB III. PERANCANGAN 3.1. Sensor cahaya sebagai saklar...37
3.2. Komparator ...38
3.3. Penggerak motor DC ...38
3.4. Sensor tinggi ...40
3.5 Pengkondisi sinyal ...41
3.5.1. Pembagi teangan ...43
3.5.2. Buffer tegangan referensi ...44
3.5.3 Penguat non inverting ...45
3.5.4. Penguat beda ...46
3.7.2. Buffer tegangan referensi ...50
3.7.3. Penguat beda ...51
3.7.4 Penguat non inverting ...52
3.8 Pengubah Analog ke Digital ...53
3.9 Konfigurasi AT89S51...55
3.10 Pengubah level TTL menjadi level RS232 ...56
3.11 Pemrograman Mikrokontroler AT89S51...58
3.11.1 Baca Data ADC ...59
3.11.2 Kirim Data ...60
3.12 Pemrograman Visual Basic...61
3.12.1 Form Utama...62
3.12.2 Rutin perhitungan IMT ...64
3.12.3 Menu Bantuan...67
BAB IV. HASIL DAN PEMBAHASAN 4.1. Pengamatan sensor tinggi ...70
4.2. Pengamatan sensor berat...72
4.3. Pengamatan ADC ...76
4.4. Pengamatan sensor cahaya ...77
4.5. Pengamatan penggerak motor...77
4.6. Pengamatan Input/Output AT89S51...78
4.6.1. Pengamatan port 0...78
4.6.2. Pengamatan port 1...79
4.6.3. Pengamatan port 2...79
4.6.4. Pengamatan port 3...80
4.7. Pengamatan RS232 ...81
4.8. Pengamatan Visual basic...81
4.8.1. Pengamatan Form...81
5.2. Saran ...86
DAFTAR PUSTAKA KESIMPULAN
Gambar 2.2. Rangkaian laser ...6
Gambar 2.3. Konfigurasi sensor optik ...7
Gambar 2.4. Komparator non inverting dengan bias positif...8
Gambar 2.5. Komparator inverting dengan bias positif...8
Gambar 2.6. Blok diagram L293D...9
Gambar 2.7. Konfigurasi pembagi tegangan ...9
Gambar 2.8. Konfigurasi buffer tegangan...10
Gambar 2.9. Penguat noninverting...10
Gambar 2.10. Rangkaian penguat beda ...11
Gambar 2.11. ADCmetode SAR...12
Gambar 2.12. Konfigurasi typical ADC 0804 ...14
Gambar 2.13. Strain gauge sensor...16
Gambar 2.14. Konfigurasi resistansi pada Strain Gauge...16
Gambar 2.15. Konfigurasi sensor ...17
Gambar 2.16. Rangkaian jembatan wheatstone ...17
Gambar 2.17. Konfigurasi pin AT89S51 ...19
Gambar 2.18. Rangkaian pembangkit sinyal detak...22
Gambar 2.19. Konfigurasi tombol reset ...22
Gambar 2.20..Susunan bit dalam register SCON ...25
Gambar 2.21. Konektor DB-9...26
Gambar 2.24. Menu Bar...30
Gambar 2.25. Tool Bar...31
Gambar 2.26. Icon Kontrol Standard ...31
Gambar 2.27. Jendela Form Layout...33
Gambar 2.28. Jendela Object Browser...33
Gambar 2.29. Jendela Code Editor...34
Gambar 2.30. File-File Aplikasi di Jendela Project Explorer...34
Gambar 3.1. Blok diagram pendeteksi bentuk tubuh...35
Gambar 3.2. Gambar mekanik tampak dari samping...36
Gambar 3.3. Gambar mekanik tampak dari atas ...36
Gambar 3.4. Sensor Cahaya ...37
Gambar 3.5. Rangkaian komparator ...38
Gambar 3.6. Rangkaian Penggerak Motor DC ...39
Gambar 3.7. Pembagi tegangan menggunakan potensiometer ...44
Gambar 3.8. Buffer tegangan referensi ...45
Gambar 3.9. Konfigurasi penguat noninverting...46
Gambar 3.10. Konfigurasi penguat beda. ...46
Gambar 3.11. Rangkaian sensor berat ...47
Gambar 3.12. Pembagi tegangan menggunakan potensiometer ...50
Gambar 3.13. Buffer tegangan referensi ...51
Gambar 3.17. Konfigurasi ADC 0804 sensor berat ...54
Gambar 3.18. Konfigurasi AT89S51...55
Gambar 3.19. Konfigurasi RS232...57
Gambar 3.20. Diagram Alir Pemprograman Mikrokontroler ...59
Gambar 3.21. Diagram alir pembacaan ADC ...60
Gambar 3.22. Diagram alir sub rutin pengiriman data ...61
Gambar 3.23. Diagram alir form utama ...63
Gambar 3.24. Gambar Form Utama...64
Gambar 3.25. Rutin perhitungan IMT ...66
Gambar 3.26. Rancangan tampilan menu Penulis ...67
Gambar 3.27. Rancangan tampilan menu Cara Menggunakan Program ...67
Gambar 3.28. Diagram alir menu bantuan ...68
Gambar 4.1. Bentuk akhir mekanik ...69
Gambar 4.2. Motor DC Yang Terpasang Pada Rangkaian ...81
Gambar 4.3. Pengiriman data serial TTL 1001101 ...83
Gambar 4.4. Logika RS232...84
Gambar 4.5. Tampilan form utama sebelum dihubungkan dengan alat...85
Gambar 4.6. Tampilan mengecek koneksi alat belum terpasang...85
Gambar 4.7. Tampilan mengecek koneksi alat sudah terpasang ...85
Gambar 4.8. Tampilan form utama setelah dihubungkan dengan alat...86
Tabel 2.2. Konfigurasi kaki-kaki DB-9...27
Tabel 3.1. Tabel kebenaran penggerak putaran motor DC ...39
Tabel 3.2. Penskalaan tegangan ...42
Tabel 3.3. Percobaan Awal ...48
Tabel 3.4. Penskalaan tegangan ...49
Tabel 4.1. Pengamatan pengondisi sinyal sensor tinggi...69
Tabel 4.2. Perhitungan selisih nilai tegangan setiap 5 cm ...71
Tabel 4.3. Pengamatan pengondisi sinyal sensor tinggi pada seseorang ...73
Tabel 4.4. Pengamatan pengondisi sinyal sensor berat...74
Tabel 4.5. Perhitungan selisih nilai tegangan setiap 5 Kg ...76
Tabel 4.6. Pengamatan pengondisi sinyal sensor berat pada seseorang...77
Tabel 4.7. Pengamatan logika keluran ADC sensor tinggi ...78
Tabel 4.8. Pengamatan logika keluran ADC sensor berat...79
Tabel 4.9. Pengamatan komparator...80
Tabel 4.10. Pengamatan port 2 untuk kontrol ADC sensor berat ...81
Tabel 4.11. Pengamatan port 2 untuk kontrol ADC sensor tinggi...82
Tabel 4.12. Pengamatan tampilan IMT pada program...88
Tabel 4.13. Pengamatan menggunakan tinggi dan berat badan sebenarnya ...88
1.1 LATAR BELAKANG MASALAH
Akhir-akhir ini semakin banyak orang menaruh perhatian pada bentuk
tubuh ideal. Banyak orang beranggapan tubuh yang gemuk atau kurus merupakan
suatu masalah, khususnya bagi wanita. Ini dikarenakan bentuk tubuh yang ideal
terkait dengan masalah kecantikan. Disamping itu, bentuk tubuh ideal juga
mempunyai hubungan dengan masalah kesehatan.
Dalam bidang kesehatan, indeks massa tubuh (IMT) sering digunakan
untuk mengkasifikasikkan bentuk tubuh seseorang kedalam berbagai kategori
seperti kurus, normal, kelebihan berat badan atau gemuk. Cara perhitungannya
adalah dengan membagi berat dalam satuan kilogram dengan kuadrat tinggi dalam
satuan meter , jadi seseorang mempunyai bentuk tubuh ideal jika tinggi dan
beratnya seimbang atau dengan kata lain masuk dalam kategori normal.
] 1 [
Pengukuran dan perhitungan secara manual saat ini dirasa kurang efisien,
sehingga dibutuhkan suatu alat yang dapat mengukur tinggi dan berat badan
secara otomatis dan sekaligus memberikan keterangan bahwa orang tersebut
mempunyai tubuh yang gemuk, kurus, atau mempunyai tubuh yang ideal.
Berdasarkan masalah tersebut maka penulis tertarik untuk mengangkat
topik Alat Pendeteksi Bentuk Tubuh Seseorang Berdasarkan Tinggi dan Berat
1.2 RUMUSAN MASALAH
Berdasarkan uraian di atas, penulis mencoba untuk mempelajari
bagaimana merancang sebuah alat yang dapat mendeteksi bentuk tubuh seseorang
berdasarkan tinggi dan berat badan.
1.3 BATASAN MASALAH
Supaya ruang lingkup penelitian tidak terlalu luas dan mengingat
keterbatasan waktu, maka alat ini mempunyai batasan-batasan sebagai berikut:
a. Menggunakan sensor potensio sebagai pembagi tegangan untuk sensor
tinggi.
b. Menggunakan motor sebagai penggerak sensor tinggi.
c. Sensor berat menggunakan strain gauge sensor.
d. Mikrokontroler yang digunakan AT89S51.
e. Koneksi ke PC menggunakan serial port.
f. Penampil menggunakan Program Visual Basic.
g. Sensor tinggi hanya untuk mengukur tinggi dari 120 cm sampai 200
cm dengan interval 1 cm.
h. Sensor berat hanya untuk mengukur berat dari 0 Kg sampai 120 Kg
dengan interval 1 Kg.
1.4 TUJUAN PENELITIAN
Adapun tujuan dari pembuatan Tugas Akhir ini adalah untuk membuat alat
1.5 METODOLOGI PENELITIAN
Metode penelitian yang yang diterapkan dalam pengembangan aplikasi ini
adalah:
1. Melakukan studi pustaka, yaitu mempelajari referensi-referensi yang
berhubungan dengan mikrokontroller, ADC, dan Visual Basic.
Referensi tersebut dapat berasal dari Internet maupun literature media
cetak.
2. Perancangan dan pembuatan alat meliputi perancangan mekanik,
elektronik, dan perangkat lunak.
3. Implementar.
4. Pengujian alat dan pengambilan data.
1.6 SISTEMATIKA PENULISAN
Sistematika penulisan dibagi dalam lima bagian yaitu:
BAB I PENDAHULUAN
Bab ini berisi latar belakang penelitian, rumusan masalah,
batasan masalah, tujuan penelitian, metodologi penelitian, dan
sistematika penulisan.
BAB II DASAR TEORI
Bab ini berisi dasar teori berupa konsep dasar perhitungan
indeks massa tubuh (IMT), blok diagram sistem, dan
komponen-komponen yang digunakan dalam melakukan
BAB III PERANCANGAN ALAT
Bab ini membahas tentang perancangan alat, konsep-konsep
alat yang akan dibuat, bagan alir program (flow chart), dan
penjelasan singkat tentang cara kerjanya.
BAB IV PENGAMATAN DAN PEMBAHASAN.
Bab ini berisi tentang hasil pengamatan yang dilakukan dan
pembahasan hasil dari pengamatan tersebut.
BAB V PENUTUP
Bab ini berisi tentang kesimpulan dari hasil pengamatan alat
yang dibuat dan berisi saran-saran yang memuat ide-ide untuk
Bab ini akan menjelaskan mengenai dasar teori yang berhubungan dengan
cara menghitung berat badan ideal, konfigurasi sensor, konfigurasi penggerak
motor DC, pengkondisi sinyal, pengubah data analog menjadi data digital (analog
to digital converter), kemudian data akan diproses oleh mikrokontroler untuk
dikirimkan ke PC melalui komunikasi serial, dan ditampilkan menggunakan
program visual basic.
2.1 Indeks Massa Tubuh (Body Mass Index)
Indeks Massa Tubuh (IMT) adalah cara paling sederhana untuk
menggolongkan apakah tubuh seseorang terlalu kurus (underweight), normal,
kelebihan berat badan (overweight) atau kegemukan (obesitas). Parameter yang
digunakan adalah dengan membandingkan berat dengan tinggi badan. Salah satu
metode yang dapat dipakai adalah dengan indeks massa tubuh (IMT) [1].
) ( )
(
) (
meter n TinggiBada meter
n TinggiBada
kg BeratBadan IMT
×
= ………(2.1)
Klasifikasi IMT menurut patokan yang dikeluarkan WHO (Badan Kesehatan
Tabel 2.1 Klasifikasi Indeks massa tubuh
Klasifikasi IMT Pria Wanita
underweight berat <16 <16
underweight sedang 16,00 – 16,99 16,00 - 16,99
underweight ringan 17,00 – 18,49 17,00 - 18,49
Normal / Ideal 18,50 – 24,99 18,50 - 22,99
Overweight 25,00 – 29 23 - 27
Obesitas >29 >27
2.2 Laser pointer
Laser pointer adalah salah satu jenis dioda yang dapat memancarkan
cahaya. Laser memancarkan cahaya berwarna merah[2].
Gambar 2.1 Simbol laser
Jika laser diberi tegangan maju maka laser akan ON seperti pada gambar 2.2 serta
akan mengeluarkan cahaya.
VCC
Laser pointer
2
1
R Id
Vd
Untuk mencari nilai R pada rangkaian laser digunakan persamaan berikut:
Id Vd Vcc
R= − ... (2.2)
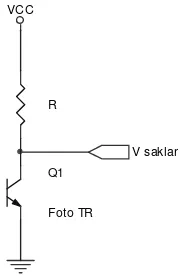
2.3 Sensor Optik
Rangkaian sensor optik menggunakan fototransisitor dengan logika tinggi
saat terhalang dan logika rendah saat fototransistor terkena sinar [3].
VCC
R
Q1
Foto TR
V saklar
Gambar 2.3 Konfigurasi sensor optik
2.4 Komparator
Rangkaian komparator merupakan rangkaian pembanding antara terminal
input inverting maupun noninverting. Bila input terminal inverting lebih tinggi
dari input terminal noninverting, maka output saturasi positif. Sebaliknya, bila
input noninverting lebih tinggi dari terminal inverting, maka output-nya saturasi
negatif . Komparator non inverting dengan bias positif ditunjukkan oleh
gambar 2.4.
-Vsat
Vsat
Vi Vo
Vref
Gambar 2.4 Komparator non inverting dengan bias positif
Dari gambar 2.4 terlihat bahwa saat Vi < Vref maka Vo = -Vsat, sedangkan saat
Vi > Vref maka Vo = Vsat. Comparator inverting dengan bias positif ditunjukkan
oleh gambar 2.5.
Vsat
-Vsat Vref Vo
Vi
Gambar 2.5 Komparator inverting dengan bias positif
2.5 Penggerak Motor DC
L293D merupakan IC driver motor yang bisa dipakai untuk
mengendalikan empat motor dengan satu arah putaran, atau dua motor dengan dua
arah putaran, seperti yang ditunjukkan pada gambar 2.6 [5]. L293D dibatasi arus
penggunaannya sampai dengan 600 mA. Pada L293D terdapat pin enable yang
berfungsi untuk menentukan apakah IC buffer yang bersangkutan bekerja atau
tidak. Untuk megaktifkan buffer pin enable diberi masukan logika tinggi,
sedangkan untuk tidak mengaktifkannya pin enable diberi masukan logikan
Gambar 2.6 Blok diagram L293D
VCC
R2
2.6 Rangkaian Pembagi tegangan
Rangkaian pembagi tegangan merupakan rangkaian yang terdiri dari
resistor yang dikonfigurasikan seperti pada gambar 2.7. Vout ditentukan dengan
persamaan 2.3 [3].
CC 2 1
2
out V
R R
V x
R
+
= ……….…(2.3)
Vout
0
R1
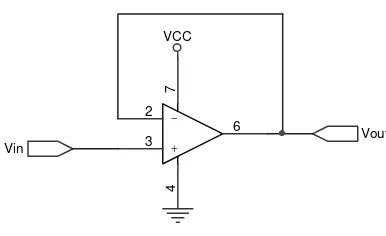
2.7 Buffer Tegangan
Buffer tegangan berfungsi untuk mempertahankan tegangan output agar
tidak terbebani oleh beban. Nilai amplitudo tegangan output sama dengan nilai
amplitudo tegangan input yang diberikan [6]. Konfigurasi buffer tegangan seperti
pada Gambar 2.8.
VCC
+
-3 2
6
4
7
Vout Vin
Gambar 2.8 Konfigurasi buffer tegangan
2.8 Penguat Non Inverting
Rangkaian penguat noninverting merupakan rangkaian penguat dengan
OP-Amp dengan konfigurasi seperti pada Gambar 2.9. Output penguat
noninverting tidak membalik nilai amplitudo gelombang input [3].
VCC
+
-3 2
6
4
7
RB
RA
V o
V i
Persamaan output rangkaian penguat noninverting adalah. Vi RB RA Vo ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ +
= 1 ………..………(2.4)
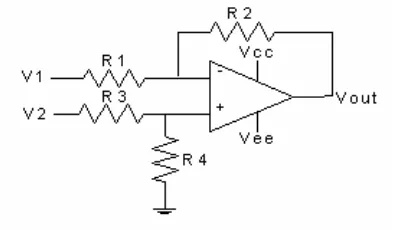
2.9 Penguat Beda
Rangkaian penguat beda tersusun atas rangkaian Operational Amplifier
(OP-Amp) yang dikonfigurasikan seperti pada Gambar 2.10 [6].
Gambar 2.10 Rangkaian penguat beda
Persamaan output rangkaian penguat beda adalah
V1 R1 R2 1 2 1 V2 R4 R3 R4
Vout ⎟−
⎠ ⎞ ⎜ ⎝ ⎛ + × + = R R ………... (2.5)
Bila nilai R4=R3=R2=R1, maka :
V1 1 1 1 1 1 V2 1 1 1
Vout ⎟−
⎠ ⎞ ⎜ ⎝ ⎛ + × + = V1 (2) V2 2 1
Vout= × −
V1 V2
2.10 Pengubah Analog Ke Digital (ADC)
Pengubah analog ke digital, berfungsi untuk mengubah tegangan analog
menjadi data digital [7]. Data digital yang dihasilkan dinyatakan dalam kode biner
dengan menggunakan dua nilai tegangan yaitu 5 volt, yang dinyatakan dengan
lambang ‘1’ dan 0 volt dengan lambang ‘0’. Bilangan biner merupakan kombinasi
dari sederetan kode 1 dan 0. Diagram blok pengubah analog ke digital dengan
metode Successive Aproximation Register (SAR) diperlihatkan seperti pada
Gambar 2.11.
Gambar 2.11 ADCmetode SAR
Pada Gambar 2.10, bagian utama pengubah analog ke digital adalah SAR
8 bit. Tegangan Vaoutput dari ADC dibandingkan dengan tegangan input Vin oleh
pembanding (comparator). Output pembanding merupakan data input serial bagi
SAR, kemudian SAR mengatur output digital 8 bit sampai menghasilkan Va yang
sama dengan tegangan input. Latch 8 bit pada akhir pengubahan akan
bit data digital yang diharapkan. ADC 8 bit dapat membangkitkan tegangan
dengan 255 tingkatan. Misalkan tegangan maksimal yang dapat dibangkitkan 2,55
volt. ADC dapat mencacah tegangan dari 0 volt sampai 2,55 volt, dengan
kenaikan 0,01 volt. Setiap kenaikan 0,01 volt keluaran ADC akan berubah 1 bit.
Nilai cacahan 0 sampai 225 akan dirubah menjadi digital dengan nilai 00H sampai
FFH.
Sesuai dengan rumusan pada data sheet ADC 0804, frekuensi clock
dengan konfigurasi typical pada datasheet seperti Gambar 2.12 adalah
C x R x 1,1
1 =
clock
f ………..(2.7)
Resolusi ADC dinyatakan dengan persamaan 2.8.
255 V -V
Resolusi= ref(+) ref(-) ………...(2.8)
Resolusi = Ketelitian ADC
Vref(+) = Referensi tegangan atas
Vref(-) = Referensi tegangan bawah
Sesuai dengan penggunaan typical ADC 0804 dengan 2 reff
V
=2,5 volt, maka
255 0 -5 Resolusi=
Perubahan ADC tiap bit dinyatakan dengan persamaan 2.9.
ADC Resolusi
konversi Tegangan
Level= ………..(2.9)
Tegangan konfersi = Level x Resousi ADC …………..…………(2.10)
Rev erensi 0 U5 ADC0804/SO 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 4 5 1 2 3 +IN -I N GN D VREF/2 GN D DB7 DB6 DB5 DB4 DB3 DB2 DB1 DB0 CLKR VC C /V R EF CLKIN INTR CS RD WR SOC Input 0
Mengaktif kan ADC
EOC
VCC = 5 v olt
Data Digital R 10K Baca ADC C 150pF
Gambar 2.12 Konfigurasi typical ADC 0804
Berikut fungsi masing-masing pin ADC 0804 pada Gambar 2.12
1. Pin 1. Chip Select (CS), sinyal untuk mengaktifkan ADC. Jika pin CS
rendah, maka ADC aktif.
2. Pin 2. Read (RD), merupakan sinyal baca. Jika RD rendah, maka ADC
memulai membaca data analog.
3. Pin 3. Write (WR), merupakan pin mulai konversi. Jika WR rendah,
4. Pin 4 (Clk In) dan 19 (Clk R), merupakan pin yang berfungsi sebagai
sumber clock.
5. Pin 5 (INTR), merupakan pin interupsi. Bila INTR bernilai tinggi,
menandakan ADC mulai konversi. Jika nilai rendah berarti selesai
konversi.
6. Pin 6 (Vin +), merupakan pin tegangan input analog positif.
7. Pin 7 (Vin -), merupakan pin tegangan input analog negatif.
8. Pin 8 dan pin 10 (Agnd dan Vgnd), pin ini harus ditanahkan karena Agnd
merupakan acuan bagi decoder pada ADC dan Vdgn sebagai acuan bagi
clock generator.
9. Pin 9 (Vref/2), merupakan pin untuk input tegangan yang menentukan
besarnya tegangan yang dibutuhkan untuk tiap cacahan.
10.Pin 1-18 (D7-D0), merupakan pin untuk output digital.
11.Pin 20 (VCC), merupakan pin untuk catu tegangan sebesar 5 Volt.
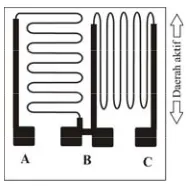
2.11 Strain Gauge sensor
Strain Gauge sensor atau sensor regangan adalah sensor dengan
menggunakan kawat penghantar yang resistansinya dapat berubah sedikit bila
Gambar 2.13 Strain gauge sensor
Perubahan panjang dari strain gauge sangat kecil, yaitu beberapa persejuta
dari satu sentimeter. Pengukur regangan ditempatkan ke suatu stuktur sedemikian
rupa sehingga persen perubahan panjang dari pengukur regangan dan struktur itu
sama. Panjang aktif dari strain gauge terletak disepanjang sumbu membujurnya.
Pengukur regangan harus dipasang sepanjang sedemikian rupa sehingga sumbu
membujurnya terletak dalam arah yang sama dengan gerakan yang akan diukur.
Konfigurasi resistansi pada Strain Gauge seperti gambar 2.14.
Gambar 2.14 Konfigurasi resistansi pada Strain Gauge
2.12 Jembatan Wheatstone
Jembatan Wheatstone digunakan pada instumentasi yang mempunyai
perubahan resistansi kecil [3]. Prinsip kerjanya adalah membandingkan perubahan
Gambar 2.15 Konfigurasi sensor
Jadi jika disedehanakan rangkaiannya menjadi seperti gambar 2.16.
Gambar 2.16 Rangkaian jembatan wheatstone
E R R
R
E ×
+ =
2 1
2
1
E
R R
R
E ×
+ =
3 4
4 2
2.13 Mikrokontroler AT89S51
Mikrokontroler AT89S51 merupakan mikrokontroler yang diproduksi
oleh ATMEL yang memiliki memori program internal yang disebut dengan
PEROM (Flash Programmable and Erasable Read Only Memory).
Mikrokontroler AT89S51 juga terdapat intruksi timer yang dapat diprogram
mikrokontroller AT89S51 sudah terdapat RAM dan ROM.. Mikrokontroler
AT89S51 mempunyai 40 kaki, 32 kaki untuk keperluan input/output port, satu
port I/O terdiri dari 8 kaki sehingga totalnya terdapat 4 buah port I/O yang
masing-masing dikenal sebagai port 0, port 1, port 2 dan port 3 [8].
Secara umum konfigurasi yang dimiliki mikrokontroler AT89S51 adalah :
• Kompatibel dengan produk MCS-51.
• 8 bit CPU (Central Processing Unit) dengan register A dan B.
• 16 bit PC (Program Counter) dan DPTR (Data Pointer).
• 8 bit PSW (Program Status Word).
• 8 bit SP (Stack Pointer).
• 8 Kbyte PEROM (Programmable and Erasable Read Only Memory).
• 256 x 8 bit internal RAM.
• 32 pin Input/Output tersusun dari 4 port (masing-masing port 8 bit).
• 2 buah Timer/Counter 16 bit.
• Register Control : TCON, TMOD, SCON, PCON, IP dan IE.
• Rangkaian osilator dan clock.
• Data Transmitter/Receiver (SBUF).
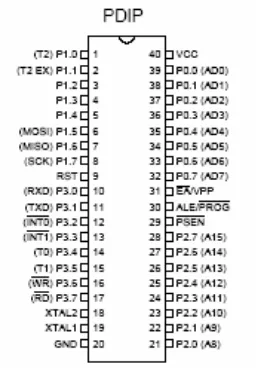
Gambar 2.17 Konfigurasi pin AT89S51
Berikut fungsi masing-masing pin AT89S51 pada Gambar 2.17
1. Pin 1 sampai 8, P1.0 sampai P1.7. Port 1 ini dapat berfungsi sebagai
I/O biasa dan dapat berfungsi sebagai input dengan memberi logika “1”.
Sebagai output, port ini dapat memberikan sink output keempat buah
input TTL. Sedangkan sebagai fungsi yang lain, dalam hal ini untuk
In-System Programming (ISP), maka port 1 dapat berperan sebagai:
a. P1.5 atau MOSI, digunakan untuk serial data input.
b. P1.6 atau MISO, digunakan untuk serial data output.
c. P1.7 atau SCK, digunakan untuk serial clock input.
2. Pin 9, RST, sebagai masukan reset. Kondisi “1” selama 2 mc (machine
cycle) pada saat osilator bekerja akan me-reset mikrokontroler yang
3. Pin 10 sampai 17, P3.0 sampai P3.7. Port 3 ini sebagai port I/O biasa
dan mempunyai sifat yang sama dengan port 1 maupun port 2.
sedangkan sebagai fungsi khusus, port ini mempunyai keterangan
sebagai berikut:
• Pin 10, P3.0 atau RXD, sebagai serial input port
• Pin 11, P3.1 atau TXD, sebagai serial output port
• Pin 12, P3.2 atau INT0, sebagai external interrupt 0 port
• Pin 13, P3.3 atau INT1, sebagai external interrupt 1 port
• Pin 14, P3.4 atau T0, sebagai external timer 0 inputport
• Pin 15, P3.5 atau T1, sebagai external timer 1 inputport
• Pin 16, P3.6 atau WR, sebagai external data memory write strobe
port
• Pin 17, P3.7 atau RD, sebagai external data memory read strobe
port
4. Pin 18, XTAL1, sebagai oscillator input
5. Pin 19, XTAL2, sebagai oscillator output
6. Pin 20, GND, sebagai ground
7. Pin 21 sampai 28, P2.0 sampai P2.7 atau A8 sampai A15. Port 2 ini
berfungsi sebagai input dengan memberi logika “1”. Sebagai output,
port ini dapat memberikan sink output ke empat buah input TTL.
8. Pin 29, PSEN (Program Store Enable), merupakan sinyal baca untuk
memori program eksternal. PSEN akan aktif dua kali setiap cycle.
9. Pin 30, PROGatau ALE (Address Latch Enable), pin ini menghasilkan
pulsa-pulsa untuk mengunci byte rendah (low byte) alamat selama
pengaksesan memori eksternal. Pin ini juga berfungsi sebagai masukan
pulsa program (the pulse program input). Pada operasi normal, ALE
akan mengeluarkan sinyal clock sebesar 1/6 dari frekuensi kristal.
10. Pin 31, Vpp atau EA (External Access Enable), EA harus selalu
dihubungkan ke ground apabila mikrokontroler akan mengeksekusi
program dari memori eksternal 0000h sampai FFFFh. Selain dari itu,
EA akan dihubungkan ke Vcc agar mikrokontroler mengakses program
secara internal.
11. Pin 32 sampai 39, P0.7 sampai P0.0 atau D7 sampai D0 dan A7 sampai
A0. Port 0 dapat berfungsi sebagai I/O biasa. Pada fungsi sebagai I/O
biasa port ini dapat memberikan sink output ke delapan buah TTL
input atau dapat diubah sebagai input dengan memberikan logika “1”
pada port tersebut.
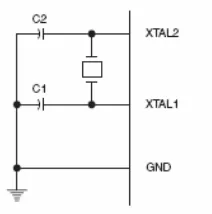
Mikrokontroler ATMEL AT89S51 memiliki osilator yang tersedia pada
kemasan IC tersebut (on chip) sebagai sumber detak (clock). Kaki pin 18 dan 19
merupakan kaki XTAL2 dan XTAL2 yang dihubungkan dengan kristal keramik
dan kapasitor yang selanjutnya terhubung dengan gound. Gambar 2.18
menunjukkan cara menghubungkan kristal sumber detak dengan Mikrokontroler
AT89S51. Besar kapasitor yang terhubung dengan sumber detak tergantung dari
jenis sumber detak yang dipasangkan. Bila sumber detak berupa kristal, maka
besar kapasitor yang terpasang adalah 30 pF ± 10 pF dan bila jenis keramik besar
kapasitor yang terpasang adalah 40 pF ± 10pF sesuai dengan yang dinyatakan
pada datasheet.
Gambar 2.18 Rangkaian pembangkit sinyal detak
Gambar 2.19 menunjukkan konfigurasi tombol reset. Reset akan aktif bila pin
RST diberikan logika high selama 2 µs.
VCC
R
RST
C
0
SW1
1 2
Bila tombol reset tidak ditekan, maka pin RST akan mendapat input logika
low, sehingga mikrokontroler akan bekerja normal. Resistor dan kapasitor
digunakan untuk memperoleh waktu pengosongan kapasitor. Waktu pengosongan
kapasitor dapat dihitung sebagai:
C R
T= × ………... (2.11)
2.14 Komunikasi Serial
Ada dua macam cara pengiriman (transmisi) secara serial yaitu
komunikasi sinkron dan komunikasi asinkron. Pada komunikasi sinkron sinyal
detak dikirim bersama-sama dengan data serial. Dalam transmisi data serial
secara asinkron, detak tidak dikirim bersama data serial [10].
Port serial pada AT89S51 bersifat duplex penuh atau full-duplex, artinya
port serial bisa menerima dan mengirim data pada waktu bersamaan. Port serial
memiliki penyangga penerima yaitu serial buffer (SBUF). Port serial dapat
menerima byte yang kedua sebelum byte yang pertama dibaca oleh register
penerima, melalui register SBUF. SBUF selalu berhubungan dengan akumulator
dalam mengisi dan menerima data.
Port serial pada AT89S51 bisa digunakan dalam empat mode kerja. Dari
ke-empat mode tersebut, 1 mode diantaranya bekerja secara sinkron dan tiga
mode lain bekerja secara asinkron. Semua mode dapat diatur melalui register
Mode 0 Mode ini bekerja secara sinkron, data serial dikirim dan diterima
melalui kaki P3.0 (RxD), sedangkan kaki P3.1 (TxD) dipakai untuk
menyalurkan detak pendorong data serial yang dibangkitkan
AT89S52. Data dikirim/diterima 8 bit sekaligus, dimulai dari bit yang
paling kecil atau LSB (bit 0), diakhiri dengan bit yang paling besar
atau MSB (bit 7). Kecepatan pengiriman data (baudrate) adalah 1/12
frekuensi kristal yang digunakan.
Mode 1 Pada mode ini, data dikirim melalui kaki P3.1 (TxD) dan diterima
melalui kaki P3.0 (RxD) secara sinkron (begitu juga mode 2 dan 3).
Pada mode ini, data dikirim/diterima 10 bit sekaligus, diawali dengan
1 bit start, disusul 8 bit data yang dimulai dari bit yang paling kecil
(bit 0), diakhiri dengan 1 bit stop. Pada AT89S51 yang berfungsi
sebagai penerima bit stop adalah RB8 dalam register Serial Control
(SCON). Kecepatan pengiriman data (baudrate) bisa diatur sesuai
dengan keperluan. Mode inilah (mode 2 dan juga mode 3) yang umum
dikenal sebagai UART atau Universal Asynchronous
Receiver/Trasmitter.
Mode 2 Data dikirim 11 bit, diawali dengan 1 bit start, kemudian 8 bit data.
Bit ke-9 yang dapat diatur lebih lanjut dan diakhiri dengan 1 bit stop.
Pada AT89S51 yang berfungsi sebagai pengirim bit 9 tersebut berasal
dari bit TB8 dalam register SCON. Pada AT89S51 yang berfungsi
sebagai penerima bit 9 ditampung pada bit RB8 dalam register SCON,
pengiriman data (baudrate) bisa dipilih antara 1/32 atau 1/64
frekuensi kristal yang digunakan.
Mode 3 Mode ini sama dengan mode 2, hanya saja kecepatan pengiriman data
(baudrate) bisa diatur sesuai keperluan, seperti halnya pada mode
asinkron (mode 1, mode 2, mode 3).
Register kontrol dan status untuk port serial berada dalam SCON seperti
diperlihatkan pada Gambar 2.10.
Gambar 2.20 Susunan bit dalam register SCON
Nilai baudrate pada komunikasi serial ditentukan oleh kristal yang digunakan,
karena berpengaruh pada jumlah limpahan timer. Perhitungan baudrate sesuai
dengan persamaan 2.15.
1 Limpahan Laju
32 2SMOD
timer
baudrate= ×
……….… (2.12)
2.15 Konfigurasi Port Serial
Gambar 2.20 merupakan gambar konektor port serial DB-9 pada bagian
belakang CPU. Pada komputer IBM PC kompatibel terdapat konektor serial
data antara komputer (Data Terminal Equipment/DTE) dengan alat-alat pelengkap
komputer (Data Circuit-Terminating Equipment/DCE).
Gambar 2.21 Konektor DB-9
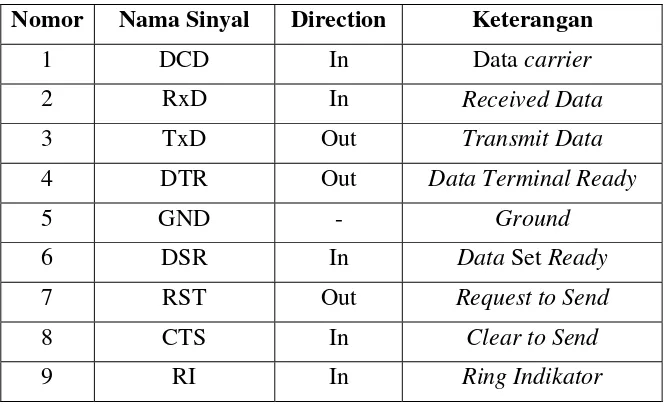
Tabel 2.2 menunjukkan konfigurasi kaki-kaki dan nama sinyal konektor serial
DB-9. Keterangan mengenai fungsi saluran RS 232 pada konektor DB-9 adalah
sebagai berikut :
• Received Line Signal Detect. Dengan saluran ini DCE memberitahukan ke
DTE bahwa pada terminal input ada data masuk.
• Received Data, digunakan DTE menerima data dari DCE.
• Transmit Data, digunakan DTE mengirim data ke DCE.
• Data Terminal Ready, pada saluran ini DTE memberitahukan terminal
siap.
• Signal Ground, saluran ground.
• Ring Indikator. Pada saluran ini DCE memberitahukan ke DTE bahwa
• Clear To Send. Dengan saluran ini DCE memberitahukan bahwa DTE
memulai mengirim data.
• Request To Send. Dengan saluran ini DCE diminta mengirim data oleh
DTE.
• DCE Ready. Sinyal aktif pada saluran ini menunjukkan bahwa DCE sudah
siap.
Tabel 2.2 Konfigurasi kaki-kaki DB-9
Nomor Nama Sinyal Direction Keterangan
1 DCD In Data carrier
2 RxD In Received Data
3 TxD Out Transmit Data
4 DTR Out Data TerminalReady
5 GND - Ground
6 DSR In Data Set Ready
7 RST Out Request to Send
8 CTS In Clear to Send
9 RI In Ring Indikator
Untuk dapat menggunakan port serial perlu diketahui alamat yang akan
digunakan. Tersedia dua port serial pada CPU, yaitu COM1 dan COM2. Base
address COM1 adalah 1016 (3F8H0) dan COM2 adalah 760 (2F8h). Alamat
tersebut adalah alamat yang biasa digunakan. Memori tempat menyimpan alamat
tersebut, yaitu memori 0000 0400H untuk baseaddress COM1 dan memori 0000
2.16 Pengubah Level TTL ke Level Serial
Standar komunikasi serial yang banyak digunakan adalah standar RS232
yang dikembangkan oleh Electronic Industry Association and the
Telecommunications Industry Association (EIA/TIA) yang pertama kali
dipublikasikan pada tahun 1962. Ini terjadi jauh sebelum IC TTL populer
sehingga sinyal ini tidak ada hubungan sama sekali dengan level tegangan IC
TTL.
Standar ini hanya menyangkut komunikasi data antara komputer DTE
dengan alat-alat pelengkap komputer DCE. Standar RS232 inilah yang biasa
digunakan pada portserial IBM kompatibel.
Standar sinyal serial RS232 memiliki ketentuan level tegangan sebagai berikut:
1. Logika ‘1’ disebut ‘mark’ terletak antara -3 Volt hingga -25 Volt.
2. Logika ‘0’ disebut ‘space’ terletak antara +3 Volt hingga +25 Volt
3. Daerah tegangan antara -3 Volt hingga +3 Volt adalah invalid level,
yaitu daerah tegangan yang tidak memiliki level logika pasti sehingga
harus dihindari. Demikian juga, level tegangan lebih negatif dari -25
Volt atau lebih positif dari +25 Volt juga harus dihindari karena
tegangan tersebut dapat merusak line driver pada saluran RS232.
Gambar 2.21 adalah contoh level tegangan RS232 pada pengiriman huruf ‘A’
dalam format ASCII tanpa bit paritas pada level TTL dan level RS232. Rangkaian
rangkaian voltage doubler atau rangkaian pengganda tegangan dan rangkaian
voltage inverter atau rangkaian pembalik tegangan.
Gambar 2.22 Level tegangan TTL dan RS232 pada pengiriman huruf ‘A’ tanpa
bit paritas.
2.17 Visual Basic 6.0
Visual Basic (atau sering disingkat VB) adalah perangkat lunak untuk
menyusun program aplikasi yang bekerja dalam lingkungan sistem operasi
Windows. Dengan memanfaatkan Visual Basic kita bisa memanfaatkan
kemampuan Windows secara optimal. Dengan kecanggihan yang ditawarkan oleh
Visual Basic kita akan merasakan begitu mudahnya menyusun program aplikasi
dengan tampilan grafis yang menawan dalam waktu yang relatif singkat.
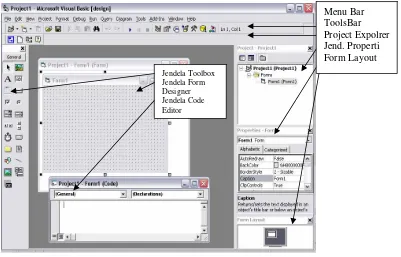
Sebaiknya kita perlu mengenal terlebih dahulu apa-apa saja yang terdapat
pada program Visual Basic. Jika program diaktifkan, tampilannya terlihat seperti
Menu Bar
ToolsBar Project Expolrer Jend. Properti Form Layout
Jendela Toolbox Jendela Form Designer Jendela Code Editor
Gambar 2.23 Lingkungan Pengembangan Visual Basic 6.0.
2.17.1 Menu Bar
Menampilkan menu perintah untuk pengembangan aplikasi. Selain
perintah standar Windows seperti File, Edit, View, Windows dan Help, terdapat
juga menu-menu khusus dalam pemrograman seperti halnya Project, Format,
Debug atau Run.
2.17.2 Tool Bars
Menyediakan akses cepat pada perintah-perintah yang populer. Secara
default (yang ditetapkan oleh pembuat program) tool bar Standard akan
ditampilkan, tool bar yang lain adalah Edit untuk ediing, Form Editor untuk
desain form, Debug untuk melacak kesalahan.
Untuk memilih tool bar yang aktif (ditampilkan), digunakan perintah
Viem|Toolbars pada Menu Bar
Gambar 2.25 Tool Bar.
2.17.3 ToolBox
Jendela tempat icon-icon kontrol yang tersedia untuk membuat antar muka
dengan cara drag-drop. Selain versi Standard (default), disediakan juga versi
Enterprise, Active-X, maupun kontrol-kontrol buatan pihak ketiga. Tampilan
toolbox akan tampak seperti pada gambar 2.26.
2.17.4 Context Menu
Berisi short-cuts untuk keperluan yang sering diminta. Untuk membuka
Context Menu, klik tombol kanan mouse pada object yang digunakan. Suatu daftar
short-cuts yang tertentu akan tersedia dari Context Menu dan tergantung pada
pointer mouse berada pada saat tombol kanan mouse diklik.
2.17.5 Jendela Properties
Menampilkan daftar properti dan nilainya dari form atau kontrol yang
sedang dipilih. Caranya, arahkan pointer mouse pada objek (form/kontrol) dan
klik tombol mouse kiri, maka sisi jendela Properti akan berubah. Properti adalah
karakteristik suatu objek, seperti ukuran, caption (judul) atau warna. Perhatikan
bahwa di bagian bawah jendela Properti ditampilkan informasi mengenai properti
yang dipilih (arahkan pointer mouse dan klik kiri).
2.17.6 Jendela Form Layout
Jendela Form Layout ( gambar 2.27) memperlihatkan posisi relatif form
terhadap layout komputer. Untuk mengubah posisinya, digunakan cara drag-drop
objek yang terlihat di jendela, yaitu klik form tersebut dan dengan tetap mengklik,
geser form dalam bidang layar.
Cara tersebut akan sama hasilnya seperti kalau mengubah nilai properti
Gambar 2.27 Jendela Form Layout.
2.17.7 Object Browser
Dapat diaktifkan dengan menekan tombol fungsi F2. Jendela Object
Browser (gambar 2.28) akan menampilkan daftar objek, fungsi, konstanta atau
prosedur yang digunakan untuk membut aplikasi, disertai dengan informasi
bagaimana item tersebut digunakan. Hal-hal yang berhubungan dengan objek
seperti metode dan properti juga dijelaskan, kemudian dapat langsung dituliskan
ke Code Editor dengan cara copy-paste.
2.17.8 Jendela Code Editor
Berfungsi sebagai pengolah kata untuk menuliskan baris-baris kode
pemrograman pada aplikasi yang sedang dibuat. Suatu jendela Code Editor
(gambar 2.29) yang terpisah akan dihasilkan untuk setiap form atau modul.
Gambar 2.29 Jendela Code Editor.
2.17.9 Jendela Project Explorer
Untuk mengetahui dan mengelola beberapa file digunakan jendela Project
Explorer (gambar 2.30).
Dalam jendela tersebut akan ditampilkan nama project, nama-nama objek
form dan nama-nama module (hanya menyimpan kode program saja) yang
digunakan. Di belakang setiap nama tersebut di dalam tanda kurung adalah nama
file penyimpannya.
Pendeteksi bentuk tubuh menggunakan dua sensor yaitu sensor tinggi dan sensor berat. Sehingga didalam perancangan dibutuhkan sensor tinggi, sensor berat, pengkondisi sinyal, pengubah analog ke digital (ADC), mikrokontroler sebagai pengubah data pararel menjadi data digital, RS 232, PC dan motor DC. Diagram blok pendeteksi bentuk tubuh diperlihatkan pada gambar 3.1. Perancangan mekanik dan peletakkan sensor seperti pada gambar 3.2.
Gambar 3.2 Gambar mekanik tampak dari samping
3.1 Sensor Cahaya sebagai Saklar
Untuk mengetahui tinggi badan yang sedang diukur digunakan sensor cahaya. Sensor cahaya ini berfungsi sebagai saklar yang dikirimkan mikrokontroler melalui interupsi agar motor berhenti berputar dan ADC mengirimkan data ke mikrokontroler kemudian dikirimkan ke PC.
Dengan arus maju laser pointer antara 10mA sampai 20mA, dan tegangan maju laser pointer sekitar 3,8Volt. Maka nilai resistor R1 yang digunakan sebagai pembatas arus, dapat dihitung sebagai berikut:
R1 = Id
Vd
Vcc−
R1 = − =120Ω 10
8 , 3 5
mA
Arus kolektor maksimum yang mampu dilewatkan oleh fototransistor adalah 1mA. Tegangan emitor-kolektor saat fototransistor dalam keadaan ON adalah 0,2Volt maka nilai resistor R2 dapat dihitung sebagai berikut:
R2 =
max
Ic Vce
Vcc−
R2 = = Ω
−
K
mA 4,8
1 2 , 0 5
VCC
R1 120
Q1
Foto TR D1
Laser pointer
2
1
R2 4.8K
V saklar
3.2 Komparator
Agar nilai keluaran dari Vsaklar merupakan logika on dan off maka digunakan komparator. Jika menggunakan Vcc sebesar 5V maka logika on sebesar 5V logika off sebesar 0V. Tegangan referensi dipilih sebesar 2,5 Volt sehingga nilai resistor R3 dan R4 dapat diperoleh dengan rumus:
Vcc R4 R3
R4
Vref ×
+ =
Bila R3 dipilih 10 kΩ, nilai R4 adalah 10 kΩ. Konfigurasi komparator seperti Gambar 3.5.
VCC
+ -U2
CA3130
3 2
6
4
7
R3 10K
R4 10K
V saklar
P3.2
V ref
Gambar 3.5 Rangkaian komparator
3.3 Penggerak Motor DC
VCC1 VCC2 U2 L293D 2 7 10 15 1 9 3 6 11 14 16 8
4 5 13 12 1A 2A 3A 4A 1,2EN 3,4EN 1Y 2Y 3Y 4Y V CC1 V CC2 GN D GN D GN D GN D M1 MOTOR DC 1 2 P3.3 P3.4
Gambar 3.6 Rangkaian Penggerak Motor DC
Cara kerja rangkaian pembalik putaran motor pada gambar diatas menurut tabel kebenaran pada tabel 3.1 :
1. Supaya rangkaian terus bekerja maka pin enable harus diberi logika tinggi, maka pada perancangan pin enable dihubungkan ke Vcc 2. Bila kaki 1A mendapat logika tinggi dan kaki 2A mendapat logika
rendah dari port P3.3maka motor DC akan berputar CCW
3. Bila kaki 1A mendapat logika rendah dan kaki 2A mendapat logika tinggi dari port P3.4 maka motor DC akan berputar CW
4. Bila kaki 1A dan kaki 2A mendapat logika yang sama maka motor DC tidak akan berputar
Tabel 3.1 Tabel kebenaran penggerak putaran motor DC
Enable 1A 2A Arah Putaran Motor
H H L CCW
H L H CW
3.4 Sensor Tinggi
Pendeteksi tinggi badan menggunakan Potensio multi turn yang dipasang menggunakan konfigurasi pembagi tegangan untuk mendapatkan nilai tegangan yang akan digunakan untuk output sensor tinggi badan. Agar ADC dapat mengenali perubahan tinggi badan setiap 1 cm digunakan pengkondisi sinyal.
Potensio multi turn dalam perancangan ini mempunyai hambatan total 50 KΩ dengan jumlah putaran sebanyak 36 putaran, dengan nilai hambatan sebesar 1 KΩ untuk satu putaran. Roda yang akan dipakai untuk memutar potensio memiliki keliling 8 cm. Alat dirancang untuk mengukur tinggi badan dari 120 cm sampai 200 cm sehingga alat hanya mempunyai rentang sebesar 80 cm, maka banyak putaran yang diperlukan potensiometer sebesar :
Banyak putaran =
cm 8
cm 80
= 10 putaran
Dengan besar hambatan maksimum yang digunakan = 10 x 1 KΩ = 10 KΩ
Vo min = 5 50000 10000×
Vo max = 5 50000 20000×
...(3.1) = 1 Volt = 2 Volt
Bila tinggi badan yang akan ditampilkan mempunyai interval perubahan tiap 1 cm, maka setiap intervalnya potensio multi turn akan menghasilkan perubahan tegangan sebesar:
V interval = 1cm cm
80 V) 1 -V 2 (
×
= 0,0125 V Dengan jumlah total interval 80
3.5 Pengkondisi Sinyal
Pengkondisi tegangan ini diperlukan supaya pengubah ADC mengenali perubahan tinggi badan setiap 1 cm atau setiap 12,5 mV. Pengubah ADC 0804 mempunyai resolusi 19,6 mV pada tegangan catuan 5 V seperti yang dijelaskan pada BAB II, atau dengan kata lain output ADC 0804 akan berubah nilainya bila ada perubahan tegangan sebesar 19,6 mV pada kaki inputnya. Jika pengkondisi sinyal dirancang setiap kenaikan / penurunan tinggi badan 1 cm maka bilangan biner output ADC akan naik / turun 1 bit. Karena alat dirancang untuk tinggi badan minimum 120 cm dan tinggi badan maksimum 200 cm untuk perubahan tinggi badan tiap 1 cm maka total interval tinggi badan adalah 80 dan total interval ADC yang diperlukan adalah 80 interval.
ADC mempunyai resolusi 19,6 mV maka besarnya tegangan yang dibutuhkan ADC untuk menghasilkan nilai biner tersebut menurut persamaan 2.9 adalah sebagai berikut :
Vin ADC = Level x Resolusi ADC
Untuk bilangan biner 50 : Untuk bilangn biner 130 : Vin ADC = 50 x 19,6 mV Vin ADC = 130 x 19,6 mV Vin ADC = 0,980 V Vin ADC = 2,548 V Sehingga interval ADC adalah :
Interval ADC =
(
)
80
V 0.980 -V .548 2
= 0,0196 V
Hubungan tegangan antara output sensor yang harus disesuaikan dengan ADC adalah seperti pada tabel 3.2
Tabel 3.2 Penskalaan tegangan
Tinggi Badan Sensor Tinggi (Vo)
Tegangan input ADC (Vi)
Bilangan Biner ADC
120 cm 1,00 Volt 0,980 Volt 00110010b 200 cm 2,00 Volt 2,548 Volt 10000010b
Sesuai dengan tabel 3.2 bentuk persamaannya yaitu :
Vi = b.Vo + a ………. (3.2) a = bilangan penjumlah tegangan input
b = bilangan penyesuai interval
Dimana interval ADC 0804 = 78 mV dan interval sensor tinggi badan = 12,5 mV, maka supaya intervalnya menjadi sama di pakai persamaan 3.3 :
b =
ggi sensor tin Interval
ADC Interval
………...……..(3.3)
b =
mV 12,5
mV 19,6
b = 1,568 maka persamaan 3.2 menjadi :
Vi = ( 1,568 x Vo ) + a ………..(3.4) Untuk mencari nilai a maka diambil salah satu data yakni Vi = 0,647 Volt
0,980 = (1,568 x 1) + a a = - 0,588 sehingga persamaannya menjadi :
Vi = ( 1,568 x Vo ) – 0,588 ……….(3.5) Pada perancangan pengkondisi sinyal op-amp yang dipakai adalah tipe CA3130.
3.5.1 Pembagi Tegangan
Untuk mendapatkan tegangan penjumlah sesuai dengan persamaan 3.5, dipakai rangkaian pembagi tegangan, sehingga nilai resistor dapat dihitung dengan mengacu pada persamaan 2.3 dan gambar 2.7.
Vref = Vcc R
R R
6 5
6 ×
+
0,588 Volt = (5Volt) R
R R
6 5
6 ×
+
0,1176 =
6 5
6
R R
R
+
Bila nilai R6 ditentukan 1 KΩ, maka nilai R5 adalah 7,5 KΩ. Karena nilai R5 tidak
ada dipasaran maka di pakai potensiometer dengan nilai 5 KΩ, sehingga rangkaiannya menjadi seperti gambar 3.7.
VCC= 5 v
R6 1K R5
7.5K
1
3
2
Vref = 0.588K
Gambar 3.7 Pembagi tegangan menggunakan potensiometer
3.5.2 Buffer Tegangan Referensi
Supaya tidak terbebani maka tegangan Vref sebesar 2,392 V perlu di
buffer. Konfigurasi buffer tegangan seperti pada gambar 3.8, dimana nilai V1 =
VCC R6 1K R5 7.5K 1 3 2 + -U2 CA3130 3 2 6 4 7 V1
Gambar 3.8 Buffer tegangan referensi
3.5.3 Penguat Non-Inverting
Sesuai dengan persamaan 3.4 dibutuhkan rangkaian penguat non inverting
dengan penguatan 1,568 kali. Sesuai pada Gambar 3.7 dan persamaan 2.4, nilai penguatan sebesar 1,568 kali dapat dirancang penguat non-inverting seperti dibawah ini: 1 7 8+ = R R AV
Dengan menentukan nilai R7=10KΩ, dapat dicari nilai R8
1 7 8 568 ,
1 = +
R R Ω = − K R 10 8 1 568 , 1 Ω = Ω ×
= K K
R8 0,568 10 5,68
Berdasarkan nilai perhitungan dapat dibangun rangkaian penguat non-inverting
VCC + -U2 CA3130 3 2 6 4 7 R8 5.68K R7 10K V 2 V sensor
Gambar 3.9 Konfigurasi penguat noninverting
3.5.4 Penguat Beda
Mengacu pada persamaan 3.5 diperlukan rangkaian penjumlah, sesuai dengan gambar 3.10 dan persamaan 2.7 :
V1 -V2 V3=
Sesuai dengan persamaan 2.6, maka nilai V3 didapatkan :
V1 R9 R12 R9 R12 1 V2 R10 R11 R11
V3 ⎟− ×
⎠ ⎞ ⎜ ⎝ ⎛ + × × + =
Agar persamaan diatas menjadi seperti persamaan 2.9, maka R9 = R10 = R11 = R12. Bila dipilih nilai resistor R11 = 10 kΩ, maka nilai R10, R12 dan R9 adalah 10 kΩ.
VCC R9 10K R10 10K R11 10K R12 10K + -TL082 3 2 6 4 7 V 1 V 3 V 2
3.6 Sensor Berat
Sensor untuk mengukur berat badan menggunakan strain gauge sensor
atau sensor regangan. Strain gauge sensor mempunyai perubahan resistansi sangat kecil maka digunakan konfigurasi rangkaian jembatan wheatstone [3]. Keluaran dari dari jembatan wheatstone sangat kecil sehingga perlu dikuatkan dahulu dengan menggunakan rangkaian penguat differensial seperti pada Gambar 3.11. Jika menginginkan penguatan 10 kali, maka nilai resistor pada penguat
differensial:
R17 = R18 = 1KΩ R19 = R20 = 10KΩ
Gambar 3.11 Rangkaian sensor berat
Untuk memperoleh perubahan tegangan setiap 1Kg digunakan rumus:
Berat mV Vt
VKg
8 , 19
1
− =
Dengan menggunakan percobaan yang dilakukan kepada beberapa orang dihasilkan data sebagai berikut:
Tabel 3.3 Percobaan Awal
Nama Berat (Kg)
Vt (mV)
Vsebenarnya
Vt-19,8mV (mV) Kg
V1 (mV)
Sukro 53 28,5 8,7 0,1642
Toni 67 30,8 11 0,1646
Pram 74 32 12,2 0,1646
Boy 98 35,9 16,1 0,1643
Jadi perubahan untuk setiap 1 Kg mempunyai rata-rata 0,164425 mV
3.7 Pengkondisi Sinyal
Alat dirancang untuk berat badan minimum 0 Kg dan berat badan maksimum 120 Kg untuk perubahan berat badan setiap 1 Kg maka total interval berat badan adalah 120 dan total interval ADC yang diperlukan adalah 120 interval.
Vin ADC = Level x Resolusi ADC
Untuk bilangan biner 0 : Untuk bilangn biner 120 : Vin ADC = 0 x 19,6 mV Vin ADC = 120 x 19,6 mV Vin ADC = 0 V Vin ADC = 2,352 V
Tabel 3.4 Penskalaan tegangan
Berat Badan Sensor Berat (Vt) Vsebenarnya (Vt-19,8mV) Tegangan input ADC (V6) Bilangan Biner ADC
0 Kg 19,8 mV 0 mV 0 Volt 00000000b 120 Kg 39,531 mV 19,731 mV 2,352 Volt 01111000b Sesuai dengan tabel 3.4 bentuk persamaannya yaitu :
mV Vt
Vsebenarnya = −19,8 ………(3.6)
Maka:
V x mV Vt
V6=( −19,8 ) Δ
Bila ADC mempunyai resolusi 19,6 mV maka besarnya pengali yang digunakan agar tegangan sensor berat sesuai dengan tegangan yang dibutuhkan ADC adalah sebagai berikut :
mV mV V 164425 , 0 6 , 19 = Δ kali V =119,2
Δ ……….(3.7) Sehingga persamaannya menjadi :
2 , 119 ) 8 , 19 (
6 Vt mV x
V = −
3.7.1 Pembagi Tegangan
Untuk mendapatkan Vref sebesar 19,8 mVolt pada tegangan catuan 5 Volt maka nilai R5 dan R6 :
Vref = Vcc R
R R
22 21
22 ×
+
0,0198 Volt = (5Volt) R
R R
22 21
22 ×
+
0,00396 =
22 21
22
R R
R
+
Bila nilai R22 ditentukan 100 Ω, maka nilai R21 adalah 25,15 KΩ. Karena nilai R5
tidak ada dipasaran maka di pakai potensiometer dengan nilai 50 KΩ, sehingga rangkaiannya menjadi seperti gambar 3.12.
VCC= 5 v
R22
100 R21
25,15K
1
3
2
Vref = 19,8 mV
Gambar 3.12 Pembagi tegangan menggunakan potensiometer
3.7.2 Buffer Tegangan Referensi
Supaya tidak terbebani maka tegangan Vref sebesar 19,8 mV perlu di
buffer. Konfigurasi buffer tegangan seperti pada gambar 3.13, dimana nilai V1 =
VCC + -CA3130 3 2 6 4 7 R22 100 R21 25,15 K 1 3 2 V 4
Gambar 3.13 Buffer tegangan referensi
3.7.3 Penguat Beda
Mengacu pada persamaan 3.6 diperlukan rangkaian penjumlah, sesuai dengan gambar 3.14 dan persamaan 2.7 :
V4 -Vt V5=
Sesuai dengan persamaan 2.6, maka nilai V5 didapatkan :
V4 R23 R26 R23 R26 1 Vt R24 R25 R25
V5 ⎟− ×
⎠ ⎞ ⎜ ⎝ ⎛ + × × + =
Agar persamaan diatas menjadi seperti persamaan 2.9, maka R23 = R24 = R25 = R26. Bila dipilih nilai resistor R25 = 10 kΩ, maka nilai R23, R24 dan R26 adalah 10 kΩ.
VCC + -CA3130 3 2 6 4 7 R26 10K R23 10K R25 10K R24 10K V 5 V4 V t
3.7.4 Penguat Non-Inverting
Sesuai dengan persamaan 3.7 dibutuhkan rangkaian penguat non inverting
dengan penguatan 119,2 kali. Sesuai pada Gambar 3.15 dan persamaan 2.10, nilai penguatan sebesar 119,2 kali dapat dirancang penguat non-inverting seperti dibawah ini: 1 27 28+ = R R AV
Dengan menentukan nilai R7=10KΩ, dapat dicari nilai R8
1 27 28 2
,
119 = +
R R Ω = − K R 1 28 1 2 , 119 Ω = Ω ×
= K K
R28 118 1 118,2
Berdasarkan nilai perhitungan dapat dibangun rangkaian penguat non-inverting
dengan konfigurasi seperti gambar 3.16.
VCC + -U2 CA3130 3 2 6 4 7 R27 1K R28 118.2 K V 6 V 5
3.8 Pengubah Analog ke Digital (ADC)
ADC pada perancangan ini digunakan untuk mengubah masukan analog dari keluaran pengkondisi sinyal menjadi data digital 8 bit. Gambar 3.16 dan gambar 3.18 menunjukkan konfigurasi rangkaian ADC 0804 dengan mode operasi Hand-Shaking, yakni dengan menghubungkan pin CS ke ground dan pin kontrol yang lain ke mikrokontroler AT89S51. Bila menggunakan R13 =10 KΩ
dan C1 = 150 pF seperti yang digunakan dalam data sheet, maka sesuai
persamaan 2.6 fclock dapat dihitung besarnya :
1 10 C
R 1,1
1
× × = clock
f
fclock =
pF 150 K
10 1 , 1
1
× Ω
×
fclock = 606 KHz
VCC= 5v olt
R29
10K
2.2K 2.2K U3
ADC0804 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 4 5 1 2 3 +IN -I
N GND
VREF/2 GN D DB7 DB6 DB5 DB4 DB3 DB2 DB1 DB0 CLKR V CC/V R E F CLKIN INTR CS RD WR C1
150pF EOC P0.5
SOC P0.7 Baca ADC P0.6
P2 mikrokontroler
V 3
Gambar 3.16 Konfigurasi ADC 0804 sensor tinggi
Output ADC sensor tinggi yang berupa data digital dihubungkan dengan mikrokontroler pada port 2. Kaki DB7 pada ADC 0804 sensor tinggi dihubungkan pada kaki P2.7 sebagai MSB (Most Significant Bit) dan pada kaki DB0 sebagai LSB (Least Significant Bit) di hubungkan dengan kaki P2.0 pada mikrokontroler.
VCC= 5v olt
C2 150pF U3 ADC0804 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 4 5 1 2 3 +IN -I N GN D VREF/2 GN D DB7 DB6 DB5 DB4 DB3 DB2 DB1 DB0 CLKR V CC/V R E F CLKIN INTR CS RD WR 2.2K R30 10K 2.2K
Baca ADC P0.1 V 6
SOC P0.2
P1 mikrokontroler
EOC P0.0
Gambar 3.17 Konfigurasi ADC 0804 sensor berat
pada kaki P1.7 sebagai MSB (Most Significant Bit) dan pada kaki DB0 sebagai LSB (Least Significant Bit) di hubungkan dengan kaki P1.0 pada mikrokontroler.Vreff didapat dari dua buah resistor bernilai 2,2 kΩ yang dirangkai
pembagi tegangan Vcc.
3.9 Konfigurasi AT89S51
Mikrokontroler AT89S51 dikonfigurasi seperti Gambar 3.18. Pin reset dihubungkan dengan saklar tekan, sebuah hambatan dan kapasitor.
VCC VCC U4 AT89S51 9 18 19 20 29 30 31 40 1 2 3 4 5 6 7 8 21 22 23 24 25 26 27 28 10 11 12 13 14 15 16 17 39 38 37 36 35 34 33 32 RST XTAL2 XTAL1 GN D PSEN ALE/PROG EA/ VPP VC C P1.0 P1.1 P1.2 P1.3 P1.4 P1.5 P1.6 P1.7 P2.0/A8 P2.1/A9 P2.2/A10 P2.3/A11 P2.4/A12 P2.5/A13 P2.6/A14 P2.7/A15 P3.0/RXD P3.1/TXD P3.2/INTO P3.3/INT1 P3.4/TO P3.5/T1 P3.6/WR P3.7/RD P0.0/AD0 P0.1/AD1 P0.2/AD2 P0.3/AD3 P0.4/AD4 P0.5/AD5 P0.6/AD6 P0.7/AD7 11.0592Mhz C3 30pF C4 30pF C5 10nF R31 10K Reset LS Atas LS Bawah
ADC sensor tinggi
ADC sensor berat
R1 OUT T1 IN Sensor Cahay a EOC sensor tinggi
Baca ADC sensor tinggi SOC sensor tinggi EOC sensor berat SOC sensor berat 1A 2A Baca ADC sensor berat
Motor Driv er 1A Motor Driv er 2A
Gambar 3.18 Konfigurasi AT89S51
Pada perancangan, waktu pengosongan dipilih sebesar 100 ms dengan asumsi waktu reset telah lebih dari 2 µs, sesuai dengan persamaan 2.11. Bila nilai R21 dipilih 10 kΩ, maka nilai C4 adalah
6 000 . 10 1 ,
C6 = 10 µF
Kristal sebagai sumber detak (clock) dipilih sebesar 11,0592 MHz agar dalam perhitungan baud rate dapat mudah dihitung. Bila menggunakan kristal 11,0592 MHz, maka timer 1 didetak dengan laju
12 MHz 11,0592
yaitu sebesar 921,6 kHz. Timer melimpah dengan laju limpahan sebesar 32 x Baud rate. Bila menggunakan kristal 11,0592 Mhz didapatkan hasil limpahan timer secara bulat.
Pin EA/VPP dihubungkan dengan sumber VCC +5 Volt agar mikrokontroler mengakses program internal dari PEROM. Jika dihubungkan dengan ground, maka mikrokontroler akan mengeksekusi program eksternal. PIN PSEN dan ALE/PROG tidak digunakan.
Pin P3.0, yaitu kaki RxD digunakan sebagai saluran untuk menerima data dari komputer terhubung dengan kaki R1out RS232, sedangkan pada kaki P3.1
yaitu kaki TxD yang digunakan sebagai jalur mengirimkan data ke komputer terhubung dengan kaki T1IN pada RS232. Pin kontrol untuk ADC 0804 pada
sensor tinggi dihubungkan dengan kaki P0.0, P0.1 dan P0.2, sedangkan pin kontrol untuk ADC 0804 pada sensor berat dihubungkan dengan kaki P0.5,