III. TEORI DASAR
A. Prinsip Dasar Metode Gayaberat
1. Teori gayaberat Newton
Teori gayaberat didasarkan oleh hukum Newton tentang gravitasi. Hukum gravitasi Newton yang menyatakan bahwa gaya tarik menarik antara dua buah benda adalah sebanding dengan massa kedua benda tersebut dan berbanding terbalik dengan jarak kuadrat antara pusat massa kedua benda tersebut. Hukum gravitasi Newton (Gambar 6):
Gambar 6. Gaya tarik menarik merarik antara dua benda m1 dan m2.
̅( ) ̂
dengan:
F = gaya tarik menarik (Newton)
G = konstanta universal gayaberat (6,67 x 10-11 m3kg-1s-2)
▸ Baca selengkapnya: jika massa lemari 120 kg dan gravitasi di tempat tersebut 10 m/s2, hitunglah besar gaya yang yang dipergunakan untuk menaikkan lemari tersebut
(2)m1 = massa benda 1 (kg)
m2 = massa benda 2 (kg)
r = jarak antar pusat massa (m)
Untuk gaya gravitasi antara benda bermassa m dengan bumi bermassa M, adalah:
karena jarak benda ke permukaan bumi sangat kecil, maka nilai r sebanding dengan nilai jari-jari bumi (R), sehingga persamaan (2) menjadi:
2. Percepatan gravitasi
Dalam pengukuran gayaberat yang diukur bukan gaya gravitasi F, melainkan percepatan gravitasi g. Hubungan antara keduanya dijelaskan oleh hukum Newton II yang menyatakan bahwa sebuah gaya adalah hasil perkalian dari massa dengan percepatan. Hukum Newton mengenai gerak Newton, yaitu:
F = mg
Interaksi antara bumi (bermassa M) dengan benda di permukaan bumi (bermassa m) sejauh jarak R dari pusat keduanya juga memenuhi hukum tersebut, maka dari persamaan (3) dan (4) didapatkan:
g = G
dimana satuan g adalah m/det2 dalam SI, atau Gal (Galileo), yaitu 1 cm/det2. Karena pengukuran dilakukan dalam variasi percepatan gravitasi (2)
(3)
(4)
yang begitu kecil, maka satuan yang sering digunakan adalah miliGal (mGal).
Persamaan (5) menunjukkan bahwa besarnya percepatan yang disebabkan oleh gravitasi di bumi (g) adalah berbanding lurus dengan massa bumi (M) dan berbanding terbalik dengan kuadrat jari-jari bumi (R).
Dalam metode gravitasi, pengukuran dilakukan terhadap nilai komponen vertikal dari percepatan gravitasi di suatu tempat. Namun pada kenyataannya, bentuk bumi tidak bulat sehingga terdapat variasi nilai percepatan gravitasi untuk masing-masing tempat.
Hal-hal yang dapat mempengaruhi nilai percepatan gravitasi adalah perbedaan derajat garis lintang, perbedaan ketinggian (topografi), kedudukan bumi dalam tata surya, variasi rapat massa batuan di bawah permukaan bumi, perbedaan elevasi tempat pengukuran, dan hal lain yang dapat memberikan kontribusi nilai gravitasi, misalnya bangunan.
3. Potensial gravitasi distribusi massa
Potensial gravitasi adalah energi yang diperlukan untuk memindahkan suatu massa dari suatu titik ke titik tertentu. Suatu benda dengan massa tertentu dalam sistem ruang akan menimbulkan medan potensial di sekitarnya. Dimana medan potensial bersifat konservatif, artinya usaha yang dilakukan dalam suatu medan gravitasi tidak tergantung pada lintasan yang ditempuhnya tetapi hanya tergantung pada posisi awal dan akhir (Rosid, 2005). Medan potensial dapat dinyatakan sebagai gradien atau potensial skalar (Blakely, 1996), melalui persamaan:
( )
Fungsi U pada persamaan di atas disebut potensial gravitasi, sedangkan percepatan gravitasi g merupakan medan potensial. Tanda minus menandakan bahwa arah gayaberat menuju ke titik yang dituju.
Dengan mengasumsikan bumi dengan massa M bersifat homogen dan berbentuk bola dengan jari-jari R, potensial gravitasi di permukaan dapat didefinisikan dengan persamaan:
( ̅) ( ̅) ( ̅)
( ̅) ∫ ( ) ∫
( ) ∫
Gambar 7. Potensial massa tiga dimensi (Telford, dkk., 1990).
Berdasarkan persamaan (9), potensial yang disebabkan oleh elemen massa dm pada titik (x, y, z) dengan jarak r dari P(0, 0, 0) adalah:
dimana (x,y,z) adalah densitas dan r2
= x2 + y2 + z2. (6) (7) (8) (9) (10)
Potensial total dari massa adalah:
∫ ∫ ∫
karena g adalah percepatan gravitasi pada sumbu z (arah vertikal) dan dengan asumsi konstan, maka:
( ) ∫ ∫ ∫
B. Model Bumi
1. Bola simetris, tidak berotasi
Pada model ini jari-jari bumi r = a, potensial di luar bumi adalah U = GM/r dengan M = massa bumi, dan gayaberat di permukaan bumi g = GM/a2. Potensial U konstan untuk r konstan. Jika kita asumsikan bidang ekuipotensial memiliki jari-jari yang sama dengan bumi, maka bidang ekuipotensial berada pada a = r dengan g konstan. Kenyataannya model ini masih jauh dari bentuk bumi sebenarnya.
Gambar 8. Model bola simetris tidak berotasi (Noor, 2012).
(11)
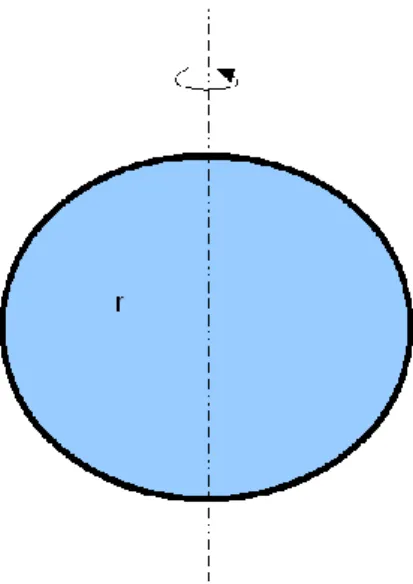
2. Bola simetris, berotasi
Pada model ini diasumsikan bola yang berputar belum terpengaruh oleh perubahan bentuk akibat sentrifugal. Akan tetapi, sentrifugal tersebut ikut diperhitungkan, maka jari-jari r = a. Potensial gaya berat di luar bumi U = GM/r. Percepatan gayaberat di luar bumi GM/r2. Bidang ekuipotensial adalah bidang yang memiliki nilai resultan gayaberat dan potensial sentrifugal konstan. Potensial gayaberat total UT = GM/r ditambah
potensial sentrifugal. Maka, bidang ekuipotensial sudah tidak berada pada r = a, karena pengaruh sentrifugal akan semakin besar ke arah ekuator. Pada kasus ini, bidang ekuipotensial akan berimpit dengan mean sea level.
Gambar 9. Model bola simetris berotasi (Noor, 2012).
3. Ellips simetris, berotasi
Pada model ini bentuk bola telah berubah menjadi ellips disebabkan deformasi pada densitas di dalam bumi (dianggap homogen) oleh gaya
sentrifugal akibat rotasi. Deformasi ini lebih dikenal dengan flattening. Adanya efek tersebut membuat potensial gayaberat total dikatakan terdiri dari komponen potensial gaya berat U, potensial sentrifugal, dan flattening. Selain itu, akan terdapat selisih jarak bidang ekuipotensial pada kutub bumi dan ekuator yang cukup siginifikan.
Gambar 10. Model ellips simetris berotasi (Noor, 2012).
4. Ellipsoid
Pada model ini bentuk bumi sudah berupa ellips dan juga dipengaruhi oleh sentrifugal akibat rotasi sama seperti model sebelumnya. Hanya saja pada model ini bidang ekuipotensial langsung didefinisikan kedalam bentuk geometris berupa elipsoidal dan memiliki potensial gaya berat total yang konstan dipermukaannya. Bentuk geometris elipsoidal dengan potensial gayaberat total konstan dipermukaan inilah yang disebut ellipsoid. Namun, bentuk ini masih belum merupakan bentuk bumi yang
sebenarnya karena densitas bumi masih dianggap homogen dan belum memperhitungkan efek topografi pada kerak bumi. Ellipsoid adalah ellips yang diputar pada sumbu pendeknya.
Gambar 11. Model ellipsoid (Noor, 2012).
5. Geoid
Bentuk muka bumi yang sebenarnya jauh dari keteraturan dan sulit dijelaskan dalam bentuk geometris. Untuk itu, disepakati bentuk muka bumi berupa sebuah bentuk yang memiliki nilai potensial gravitasi yang sama di permukaannya dengan berimpit pada mean sea level di tempat yang cukup jauh dari daratan (Lowrie, 2011). Permukaan inilah yang selanjutnya disebut geoid.
Geoid sendiri didefinisikan sebagai sebuah bidang ekuipotensial medan gravitasi bumi yang umumnya berada di dalam massa topografi pada daratan dan kurang lebih berimpit dengan mean sea level (msl) di lautan (Ellmann, 2005). Disebutkan berimpit dengan mean sea level karena
mempertimbangkan sentrifugal akibat rotasi sama halnya pada model bumi yang bulat simetris dan berotasi.
Pada daratan, distribusi densitas di kerak bumi sangat kompleks. Adanya variasi densitas massa membuat gayaberat yang terukur pada permukaan bumi menjadi bervariasi juga. Ditambah lagi dengan rotasi bumi yang dapat mengakibatkan massa tersebut terdeformasi yang dapat mempengaruhi gayaberat terukur pada suatu titik di permukaan bumi.
Keberadaan massa tersebut juga ikut mempengaruhi bentuk geoid. Jika pada model pertama bentuk geoid akan mengikuti bentuk muka laut, maka ketika faktor massa diperhitungkan bentuk geoid akan berubah karena terdapat variasi densitas massa yang mengakibatkan perbedaan gayaberat di sekitar massa. Sebagai penyesuaian bentuk bidang agar tetap memiliki potensial gayaberat yang konstan dipermukaannya, bidang ekuipotensial harus menonjol naik mengikuti pengaruh potensial gayaberat dari massa tersebut. Tonjolan pada bidang ekuipotensial yang diukur dari ellipsoid referensi ini dikenal dengan undulasi geoid h atau N.
Gambar 12. Undulasi geoid di atas ellipsoid referensi disebabkan adanya massa lokal di bawah ellipsoid (Lowrie, 2011).
Local
Gravity Geoid
Ellipsoidal Mass
C. Koreksi Metode Gayaberat
Besar nilai gravitasi bergantung kepada lima faktor, yaitu lintang, elevasi topografi daerah sekitar pengukuran, pasang surut bumi, dan variasi densitas di bawah permukaan (Telford, dkk., 1990). Eksplorasi gravitasi lebih menekankan pada perubahan besar nilai gravitasi oleh karena variasi densitas di bawah permukaan. Sementara nilai gravitasi yang terukur pada alat gravimeter tidak hanya berasal dari nilai gravitasi yang disebabkan oleh variasi densitas di bawah permukaan, tetapi juga dari keempat faktor lainnya. Koreksi dalam metode gravitasi diperlukan untuk menghilangkan faktor-faktor lain yang mempengaruhi besar nilai gravitasi sehingga didapatkan nilai gravitasi yang hanya disebabkan oleh pengaruh variasi densitas di bawah permukaan. Berikut adalah koreksi-koreksi yang dilakukan kepada data gravitasi lapangan (gread):
1. Koreksi pasang surut (tide correction)
Gambar 13. Pengaruh gravitasi bulan di titik P (Kadir, 2000).
c
Efek pasang surut menyebabkan perubahan hasil pengamatan percepatan gravitasi yang disebabkan oleh interaksi gravitasi bulan dan matahari terhadap bumi maupun terhadap gravimeter. Efek ini menyebabkan variasi percepatan gravitasi yang bergantung waktu sehingga termasuk ke dalam koreksi Temporal Based Variation. Sebagaimana pengaruh gaya gravitasi bulan dan matahari menyebabkan perubahan bentuk permukaan air laut, hal itu juga menyebabkan berubahnya bentuk bumi (earth distortion). Karena batuan memberikan gaya eksternal lebih kecil dibandingkan air, besarnya distorsi bumi di bawah pengaruh gaya eksternal lebih kecil dibandingkan besarnya distorsi air laut. Besarnya distorsi air laut akibat efek pasang surut ini terukur dalam meter, sedangkan besarnya distorsi bumi terukur dalam sentimeter. Distorsi ini menyebabkan perubahan percepatan gravitasi dikarenakan perubahan bentuk bumi, sehingga jarak gravimeter terhadap pusat bumi berubah (percepatan gravitasi berbanding terbalik dengan kuadarat jarak). Distorsi bumi bervariasi untuk setiap lokasi, dan variasi percepatan gravitasi akibat efek pasang surut ini bisa mencapai 0,2 mGal.
Untuk menghilangkan pengaruh dari efek pasang surut tersebut, maka data gayaberat yang diperoleh perlu dilakukan koreksi yang dalam hal ini adalah koreksi pasang surut (tidal correction). Persamaan yang digunakan untuk menghitung percepatan pasang surut yang dihasilkan akibat bulan dan matahari, sebagaimana mereka berinteraksi pada setiap titik di bumi sebagai fungsi waktu, sudah diperkenalkan oleh Longman pada tahun
1959. Pengaruh gravitasi bulan di titik P pada permukaan bumi yang terlihat pada Gambar 13 dapat diselesaikan melalui persamaan:
( ) ( ) * ( ) ( )
+
dimana:
= sudut lintang = sudut deklinasi t = moon hour angle c = jarak rata-rata ke bulan
2. Koreksi apungan (drift correction)
Gambar 14. Koreksi apungan (Reynolds, 1997).
Koreksi apungan merupakan koreksi pada data gravitasi, sebagai akibat perbedaan pembacaan nilai gravitasi di stasiun yang sama pada waktu yang berbeda oleh alat gravimeter (Gambar 14). Perbedaan tersebut disebabkan karena terjadi guncangan pegas dan perubahan temperatur
(12) Repeated value at base station Drift Time (h) D ri ft of grav im et er ( g .u.)
pada alat gravimeter selama proses perjalanan dari satu stasiun ke stasiun berikutnya. Komponen gravimeter dirancang dengan sistem keseimbangan pegas yang dilengkapi dengan massa beban yang tergantung diujungnya. Karena pegas yang tidak elastis sempurna, maka sistem pegas mengembang dan menyusut perlahan sebagai fungsi waktu.
Untuk menghilangkan efek tersebut, proses akusisi data atau pengukuran dirancang dalam suatu lintasan tertutup sehingga besar penyimpangan tersebut dapat diketahui. Koreksi apungan diberikan oleh persamaan (13) berikut ini:
( ) dimana:
Dn = koreksi drift pada titik n
gakhir = pembacaan gravimeter pada akhir looping
go = pembacaan gravimeter pada awal looping
takhir = waktu pembacaan pada akhir looping
to = waktu pembacaan pada awal looping
tn = waktu pembacaan pada stasiun n
3. Koreksi lintang (lattitude correction)
Koreksi lintang pada data gravitasi diperlukan sebagai akibat dari rotasi bumi. Hasil dari rotasi bumi tersebut akan menyebabkan perbedaan nilai percepatan gravitasi di seluruh permukaan bumi, yaitu bervariasi dari ekuator ke kutub atau bervariasi terhadap lintang.
Gambar 15. Perbedaan nilai gayaberat di kutub dan khatulistiwa (Sarkowi, 2011).
Secara matematis, anomali medan gravitasi di topografi dapat dinyatakan dalam bentuk persamaan berikut:
∆g(x,y,z) = gobs (x,y,z) – gteoritis (x,y,z)
dengan ∆g(x,y,z) merupakan anomali medan gravitasi di topografi, dan gobs(x,y,z) adalah medan gravitasi observasi di topografi yang sudah
dikoreksikan terhadap koreksi pasang surut, koreksi tinggi alat dan koreksi drift. Sedangkan gteoritis(x,y,z) merupakan medan gravitasi teoritis di
topografi.
Medan gravitasi teoritis yang ditentukan lebih awal adalah medan gravitasi normal yang terletak pada bidang datum (pada ketinggian z=0) sebagai titik referensi geodesi. Rumusan medan gravitasi normal pada bidang datum ini telah ditetapkan oleh The International Association of geodesy (IAG) yang diberi nama Geodetic Reference System 1980 (GRS80) sebagai fungsi lintang, yaitu:
g( )=(978032,700 (1 + 0,0053024 sin2 - 0,0000058 sin2 )) (15) (14) Increase Radius Earth Rotation Excess mass g = 9,83 m/s2 g = 9,78 m/s2
dengan adalah garis lintang.
Dari persamaan (14) terlihat bahwa semakin tinggi letak lintangnya, maka semakin besar percepatan gravitasinya. Jadi, medan gravitasi bumi cenderung bertambah besar ke arah kutub.
4. Koreksi udara bebas (free air correction)
Koreksi udara bebas merupakan koreksi yang disebabkan karena pengaruh variasi ketinggian terhadap medan gravitasi bumi. Koreksi ini dilakukan untuk menarik bidang pengukuran (P) ke bidang datum yaitu bidang geoid (Po) (Gambar 16).
Gambar 16. Koreksi udara bebas terhadap data gayaberat (Zhou, dkk., 1990).
Perhitungan koreksi udara bebas (free air correction) dilakukan dengan cara (Rosid, 2005):
g = G
(16)
(17)
FREE AIR CORRECTION FAC = - 0,3086H
Gravity observation point
Land surface
Heigh t
Datum surface sea level
Jika pertambahan jari-jari dinyatakan dalam bentuk ketinggian di atas muka laut h, maka:
dimana g adalah besar nilai gravitasi absolut dan r adalah jari-jari bumi. Dengan memasukkan nilai g dan r ke dalam persamaan (18), maka besar koreksi udara bebas adalah:
dimana h adalah ketinggian dalam pengukuran gravitasi.
Koreksi udara bebas (free air correction) tidak memperhitungkan massa batuan yang terdapat di antara stasiun pengukuran dengan bidang geoid. Koreksi akan dijumlah jika titik pengukuran berada di atas geoid. Karena semakin tinggi h, maka g akan semakin kecil sehingga untuk menyamakan dengan bidang geoid koreksi harus ditambah. Dan juga sebaliknya, koreksi akan dikurang jika titik pengukuran berada di bawah geoid. Namun, pada umumnya koreksi ini dijumlah karena permukaan bumi berada di atas bidang geoid.
5. Koreksi Bouguer (Bouguer correction)
Koreksi Bouguer memperhitungkan massa batuan yang terdapat di antara stasiun pengukuran dengan bidang geoid. Koreksi ini dilakukan dengan menghitung tarikan gravitasi yang disebabkan oleh batuan berupa slab dengan ketebalan H dan densitas rata-rata ρ (Gambar 17).
Koreksi ini dihitung dengan persamaan (20) (Telford, dkk., 1990): (18)
dimana:
= 3,14; G = 6,67 10-11
m3kg-1det-3; dalam gr/cm3; dan h dalam meter, maka:
mGal
Tanda koreksi Bouguer berbanding terbalik dengan koreksi udara bebas. Pada koreksi Bouguer, jika titik pengukuran berada di atas bidang geoid, maka koreksi akan dikurang. Hal ini dikarenakan kandungan massa di atas bidang geoid membuat nilai g titik pengukuran lebih besar dari nilai g pada bidang geoid, sehingga untuk menarik titik pengukuran ke bidang geoid koreksi harus dikurang. Dan juga sebaliknya, jika titik pengukuran berada di bawah bidang geoid, koreksi akan ditambah.
Gambar 17. Koreksi Bouguer (Zhou, dkk., 1990).
6. Koreksi medan (terrain correction)
Koreksi medan atau topografi dilakukan untuk mengoreksi adanya pengaruh penyebaran massa yang tidak teratur di sekitar titik pengukuran. (20)
Gravity observation point BOUGUER CORRECTION
Datum surface sea level Land surface
Dalam koreksi Bouguer diasumsikan bahwa titik pengukuran di lapangan berada pada suatu bidang datar yang sangat luas. Sedangkan seringkali kenyataan di lapangan memiliki topografi yang berundulasi seperti adanya lembah dan gunung. Maka jika hanya dilakukan koreksi bouguer saja hasilnya akan kurang sempurna.
Gambar 18. Stasiun yang berada dekat dengan gunung (Reynolds, 1997).
Gambar 19. Stasiun yang berada dekat dengan lembah (Reynolds, 1997).
Jika stasiun pengukuran berada dekat dengan gunung, maka akan terdapat gaya ke atas yang menarik pegas pada gravimeter, sehingga akan mengurangi nilai pembacaan gravitasi (Gambar 18).
Exces mass
Sementara jika stasiun pengukuran berada dekat dengan lembah, maka akan ada gaya ke bawah yang hilang sehingga pegas pada gravimeter tertarik ke atas. Hal ini akan mengurangi pembacaan nilai gravitasi (Gambar 19).
Dengan demikian pada kedua kondisi tersebut, koreksi medan ditambahkan kepada nilai gravitasi. Cara perhitungan koreksi topografi dapat dilakukan dengan menggunakan Hammer Chart yang dikembangkan oleh Sigmund Hammer. Hammer Chart membagi area ke dalam beberapa zona dan kompartemen (segmen). Hammer melakukan pendekatan pengaruh topografi dengan suatu cincin yang terlihat pada Gambar 20 di bawah ini.
Gambar 20. Hammer Chart (Reynolds, 1997).
Menurut Reynolds (1997), besarnya koreksi topografi dengan menggunakan pendekatan cincin silinder dituliskan dalam persamaan (22):
dimana:
N = jumlah kompartemen pada zona yang digunakan r2 = radius luar (m)
r1 = radius dalam (m)
z = perbedaan ketinggian rata-rata kompartemen dan titik pengukuran Sehingga besar nilai koreksi medan pada setiap stasiun pengukuran gayaberat adalah total dari koreksi medan (TC) sektor-sektor dalam satu stasiun pengukuran tersebut.
Setelah melakukan proses koreksi di atas, maka akan didapatkan nilai yang disebut Anomali Bouguer (Bouguer Anomaly). Anomali Bouguer adalah anomali yang disebabkan oleh variasi densitas secara lateral pada batuan di kerak bumi yang telah berada pada bidang referensi yaitu bidang geoid. Persamaan untuk mendapatkan nilai anomali Bouguer (gAB) adalah:
dimana:
= nilai pembacaan gravitasi di lapangan = koreksi pasang surut
= koreksi apungan
= koreksi lintang
= koreksi udara bebas
= koreksi Bouguer
(23) (24)
Nilai anomali Bouguer di atas sering disebut sebagai Complete Bouguer Anomaly (CBA). Sedangkan anomali Bouguer yang didapatkan tanpa memasukkan koreksi medan ke dalam perhitungan disebut Simple Bouguer Anomaly (SBA). Sementara nilai lain yang biasa digunakan untuk survei daerah laut adalah Free Air Anomaly (FAA). FAA adalah nilai anomali Bouguer yang tidak memperhitungkan efek massa batuan sehingga tidak memasukkan koreksi Bouguer ke dalam perhitungan.
D. Estimasi Densitas Permukaan Rata-Rata
Dalam eksplorasi geofisika dengan metode gravitasi dimana besaran yang menjadi sasaran utama adalah rapat masa (kontras densitas), maka perlu diketahui distribusi harga rapat massa batuan baik untuk keperluan pengolahan data maupun interpretasi.
Rapat massa batuan dipengaruhi oleh beberapa faktor diantaranya adalah rapat massa butir atau matriks pembentuknya, porositas, dan kandungan fluida yang terdapat dalam pori-porinya. Namun demikian, terdapat banyak faktor lain yang ikut mempengaruhi rapat massa batuan, diantaranya adalah proses pembentukan, pemadatan (kompaksi) akibat tekanan, kedalaman, serta derajat pelapukan yang telah dialami batuan tersebut.
Ada beberapa cara yang dapat digunakan untuk menentukan rapat massa rata-rata, yaitu:
1. Analisis batuan daerah survei dari pengukuran di laboratorium 2. Metode Nettleton
Analisis batuan daerah survei merupakan penentuan rapat massa rata-rata batuan yang dilakukan secara kualitatif, sedangkan Metode Nettleton dan Metode Parasnis merupakan penentuan rapat massa rata-rata batuan yang dilakukan secara kuantitatif.
1. Metode nettleton
Gambar 21. Estimasi rapat massa dengan metode Nettleton (Telford, dkk., 1990).
Metode ini didasarkan pada pengertian tentang koreksi Bouguer dan koreksi medan, dimana jika rapat massa yang digunakan sesuai dengan rapat massa permukaan, maka penampang atau profil anomali gayaberat
topografi Gayaberat obsevasi Anomali Bouguer Terbaik G b ( m G al ) G obs (m G a l) E levas i
menjadi smooth. Dalam aplikasi, penampang dipilih melalui daerah topografi kasar dan tidak ada anomali gayaberat target.
Anomali Bouguer titik amat pada suatu lintasan diplot dengan berbagai macam harga rapat massa ( ). Nilai densitas permukaan diperoleh apabila nilai anomali gayaberat yang dihasilkan tidak mempunyai korelasi dengan topografi di daerah tersebut.
2. Metode parasnis
Metode parasnis didasarkan pada persamaan anomali Bouguer dengan asumsi nilai anomali Bouguernya adalah nol.
dimana :
CBA = Anomali Bouguer Lengkap
= harga percepatan gravitasi observasi
= harga percepatan gravitasi normal
= koreksi udara bebas
= koreksi Bouguer
Dari asumsi tersebut diperoleh:
atau
( )
Dari persamaan (27) bila ruas kiri dinyatakan sebagai variabel y dan ruas kanan sebagai variabel x, dan kedua variabel diplot sebaran datanya pada koordinat kartesian, maka dapat dicari suatu persamaan garis linier (27) (25)
dengan metode kuadrat terkecil (least square). Persamaan regresi yang dihasilkan adalah:
Dimana nilai a adalah nilai rapat masa batuan rata-rata.
Gambar 22. Grafik yang menunjukkan hubungan antara
dan ( ) (Sarkowi, 2011).
E. Analisis Spektrum
Analisis spektrum merupakan proses Transformasi Fourier (transformasi dari domain waktu ke dalam domain frekuensi) untuk mengubah suatu sinyal menjadi penjumlahan beberapa sinyal sinusoidal dengan berbagai frekuensi. Hasil dari transformasi ini akan berupa spektrum amplitude dan spektrum phase sehingga dapat memperkirakan kedalaman dengan mengestimasi nilai bilangan gelombang (k) dan amplitudo (A) yang dapat digunakan untuk menghitung lebar jendela filter yang selanjutnya dijadikan sebagai input data dalam proses filtering, pemisahan anomali regional, dan anomali residual.
(28)
Blakely (1995) menurunkan spektrum dari potensial gayaberat yang teramati pada suatu bidang horizontal.
( ) ( ) ( ) | |( )| |
Berdasarkan kedua persamaan diatas maka diperoleh: ( ) | |( )| |
Sehingga Transformasi Fourier anomali gayaberat pada lintasan yang diinginkan adalah:
( ) ( ) ( ) ( ) | |( )
dimana:
= anomali gayaberat k = bilangan gelombang Zo = ketinggian titik amat
Z = kedalaman benda anomali
Bila distribusi densitas bersifat random dan tidak ada korelasi antara masing-masing nilai gayaberat, maka =1, sehingga hasil Transformasi Fourier anomali gayaberat menjadi:
| |( ) dimana: A = amplitudo C = konstanta (29) (30) (31) (32)
Selanjutnya dengan melogaritmakan hasil Transformasi Fourier tersebut di atas, maka akan diperoleh hubungan antara amplitudo (A) dengan bilangan gelombang (k) dan kedalaman ( ):
( )| |
Hasil logaritma ini menunjukkan bahwa kedalaman rata-rata bidang diskontinuitas rapat massa akan berbanding dengan kemiringan grafik spektrum. Kemudian dari hubungan itu pula, dengan menggunakan metode least square, maka estimasi kedalaman anomali adalah gradien dari masing-masing grafik spektrum pada tiap lintasan. Hubungan panjang gelombang (λ) dengan k diperoleh dari persamaan Blakely (1995):
dengan n adalah lebar jendela.
Gambar 23. Grafik hubungan antara amplitudo dan bilangan gelombang pada analisis spektrum (Sarkowi, 2011).
(33) (34) (35) Analisis Spektrum Zona Regional Zona Residual Zona Noise
Maka didapatkan estimasi lebar jendelanya yaitu:
Ilustrasi penentuan kedalaman proses regresi data logaritma hasil Transformasi Fourier ini akan ditunjukan pada Gambar 23.
F. Moving Average
Anomali Bouguer merupakan suatu nilai anomali gaya berat yang disebabkan oleh perbedaan densitas batuan pada daerah dangkal dan daerah yang lebih dalam di bawah permukaan. Efek yang berasal dari batuan pada daerah dangkal disebut anomali residual, sementara efek yang berasal dari batuan pada daerah yang lebih dalam disebut anomali regional. Proses ini bertujuan untuk memisahkan antara anomali residual dengan anomali regional yang terdapat pada anomali Bouguer. Selain itu, hasil pemisahan anomali regional dan residual berguna sebagai bahan untuk interpretasi kualitatif tentang kondisi bawah permukaan sebelum melakukan pembuatan model struktur bawah permukaan (interpretasi kuantitatif).
Moving average window filter merupakan suatu metode atau teknik pemisahan yang jika dianalisis dari spektrumnya akan menyerupai low pass filter sehingga output dari proses ini adalah frekuensi rendah dari anomali Bouguer yang akan merepresentasikan kedalaman yang lebih dalam (regional). Karena frekuensi rendah ini mempunyai penetrasi yang lebih dalam. Selanjutnya anomali residual didapatkan dengan cara mengurangkan anomali regional dari anomali Bouguernya.
Persamaan moving average untuk lebar window N N adalah: ( ) ∑ ∑ ( )
untuk anomali residualnya adalah:
( ) ( ) ( )
dan untuk estimasi lebar jendelanya didapatkan dari:
dimana:
= grid spasi
= frekuensi cut-off regional dan residual
Penerapannya pada peta 2D dimana harga pada suatu titik dapat dihitung dengan merata-ratakan semua nilai di dalam sebuah kotak persegi dengan titik pusat adalah titik yang akan dihitung harga (Gambar 24) (Robinson, 1988). Contoh penerapannya dengan jendela 5 5 pada data 2D sesuai dengan persamaan (40) berikut:
[( ) ( ) ( ) ( )]
Gambar 24. Sketsa moving average 2-D jendela 5 5 (Robinson, 1988). (37)
(38)
(39)
Berdasarkan karakter spektrum dari filter ini, lebar window N N berbanding langsung dengan low cut dari panjang gelombang atau high cut frekuensi spasial dari low-pass filter, sehingga dengan bertambahnya lebar window akan menyebabkan bertambahnya panjang gelombang regional output. Dengan kata lain, lebar window terkecil menyebabkan harga regionalnya mendekati anomali Bouguernya.
G. Pemodelan Struktur Bawah Permukaan
Pemodelan struktur bawah permukaan dilakukan dengan cara pemodelan ke depan (forward modelling). Pemodelan ke depan adalah suatu proses perhitungan data yang secara teoritis akan teramati di permukaan bumi jika diketahui harga parameter model bawah permukaan tertentu (Grandis, 2009). Dalam pemodelan dicari suatu model yang cocok atau fit dengan data lapangan, sehingga model tersebut dianggap mewakili kondisi bawah permukaan di daerah pengukuran.
1. Metode Talwani
Menurut Talwani (1959), pemodelan ke depan untuk menghitung efek gayaberat model benda bawah permukaan dengan penampang berbentuk sembarang yang dapat diwakili oleh suatu poligon bersisi n dinyatakan sebagai integral garis sepanjang sisi-sisi poligon:
∮
Integral garis tertutup tersebut dapat dinyatakan sebagai jumlah integral garis tiap sisinya, sehingga dapat ditulis sebagai berikut:
∑
Model benda anomali sembarang oleh Talwani didekati dengan poligon-poligon dimana sistem koordinat kartesian yang digambarkan seperti di atas. Untuk benda poligon sederhana seperti pada Gambar 25, dapat ditunjukan dengan persamaan sebagai berikut:
∫ sehingga diperoleh: ,( ) ( ( ( )- dimana, ( ) ( ) ( )
Gambar 25. Efek gravitasi poligon menurut Talwani (Talwani, 1959). (42)
(43)
(44)
(45)
Untuk keperluan komputasi, persamaan (44) ditulis dalam bentuk yang lebih sederhana, dengan mensubstitusikan harga-harga sin , cos , tan dengan koordinat titik poligon dalam x dan z sebagai berikut:
{ (
)}
2. Efek gravitasi benda 2,5D
Perhitungan dua dimensi (2D) sepanjang profil yang tegak lurus terhadap sumbu dari benda prismatik yang mempunyai panjang tak berhingga telah dikenal dalam interpretasi kuantitatif metode gravitasi. Metode perhitungan tersebut banyak digunakan karena perhitungannya dilakukan dengan mengandaikan struktur geologi sebagai struktur yang mendekati benda dua dimensi sehingga akan mempermudah perhitungan, dan data yang diperoleh biasanya merupakan profil yang tegak lurus terhadap strike. Pada kenyataannya setiap benda atau struktur pasti mempunyai ujung. Oleh karena itu, untuk lebih mendekati keadaan alam yang sebenarnya, maka diperkenalkan benda 2,5 dimensi. Benda 2,5 dimensi yaitu benda 3 dimensi yang mempunyai penampang yang sama dengan panjang berhingga. Medan gravitasi pada titik yang berada di luar suatu massa yang terdistribusi kontinyu dengan volume V (Gambar 26) adalah:
̅( ̅) ( ̅) dengan potensial gravitasi:
( ̅) ∫ ( ̅ )| ̅ ̅̅̅|
(47)
(48)
Gambar 26. Medan gravitasi pada titik P( ̅) yang berada di luar suatu massa yang terdistribusi kontinyu ( ̅ ) dengan volume V (Cady, 1980).
Gambar 27 menunjukkan benda 2,5 dimensi. Sumbu y paralel dengan strike benda dan pengamatan dilakukan sepanjang profil pada bidang x-z. Sumbu z positif ke bawah.
Berdasarkan persamaan (48) dan (49), maka diperoleh persamaan:
Persamaan (50), (51), dan (52) merupakan turunan parsial pertama dari integral volume. Dengan mengasumsikan densitas homogen, persamaan (50) menjadi:
∭ ( )
Fz dipilih untuk integrasi yang lebih detail karena total medan gravitasi yang terukur memiliki arah yang vertikal yang disebut efek gravitasi. Dalam metode gravitasi, strike benda dapat memiliki panjang y1 dan y2
yang berbeda. Untuk menghilangkan ambiguitas tanda, y1 dan y2 memiliki
tanda positif pada bidang x-z. y1 positif pada arah +y dan y2 positif pada
arah –y.
Berdasarkan persamaan (53), perhitungan Fz dari –y2 ke 0 dan dari 0 ke
y1 adalah:
∬[ ( ) ( ) ( )]
dengan √ dan √ Persamaan (54) pada bidang z adalah:
∫ [ ( ) ( ) ( )] dx
Integral pada poligon dapat dimasukkan pada integral garis di sekitar poligon dengan z sebagai fungsi x di tiap sisinya (Gambar 28), maka:
(51) (52) (53) (54) (55) (50)
dengan:
dan merupakan batasan z dari perluasan sisi i. Persamaan (56) menjadi: ( )
dengan:
∮ [ ( ) ] dan
∮ [ √ ( ) ]
untuk n = 1 dan 2. Perhitungan ini dilakukan searah dengan jarum jam pada N sisi poligon. Percepatan gravitasi g=Fz dari benda di bawah titik amat dengan kontras densitas negatif bernilai positif ke bawah sepanjang sumbu z.
Gambar 28. Hubungan x-z pada satu sisi cross section berbentuk poligon (Cady, 1980).
(56)
(57)
(58)
H. Analisis Derivative
1. First Horizontal Derivative (FHD)
Dengan mengambil derivative dari gz di sepanjang sumbu x atau y,
maka didapat komponen FHD dari gayaberat untuk benda 2D sesuai dengan persamaan (58) (Telford, dkk., 1976).
∬
Perhitungan FHD dihitung dengan menggunakan persamaan: ( ) ( )
dimana merupakan nilai anomali Bouguer (mGal) dan selisih jarak lintasan (meter).
2. Second Vertical Derivative (SVD)
Metode SVD dapat digunakan untuk membantu interpretasi jenis struktur terhadap data anomali Bouguer yang diakibatkan oleh adanya struktur patahan turun atau patahan naik (Sarkowi, 2011).
Medan potensial U dengan sumber tidak berada di dalamnya akan memenuhi persamaan Laplace sesuai dengan persamaan (62) (Telford, dkk., 1976).
Untuk metode gayaberat, persamaannya sesuai dengan persamaan (63) dan (64) berikut: (60) (62) (63) (61)
Untuk SVD persamaannya sesuai dengan persamaan (65) (Telford, dkk., 1976) berikut: ( )
Untuk data 1D persamaannya menjadi persamaan (66) berikut:
(
)
Berdasarkan persamaan di atas, tampak bahwa untuk suatu penampang 1D, anomali Second Vertical Derivative (SVD) ( ) dapat dihitung dari turunan satu kali terhadap data First Horizontal Derivative (FHD) ( ( )). Sedangkan kriteria untuk menentukan jenis struktur patahan
adalah sebagai berikut:
2.1 Untuk sedimentary basin atau patahan turun berlaku: ( )
|( ) |
2.2 Untuk granit batolit/intrusi dan patahan naik berlaku: ( )
|( ) |
Untuk data anomali gayaberat dalam grid teratur, anomali Second Vertical Derivative (SVD) dapat diturunkan melalui proses filtering, dimana persamaan konvolusinya diberikan oleh persamaan (69):
( ) ∫ ∫ ( ) ( ) (65) (66) (69) (64) (67) (68)
dimana F adalah filter Second Vertical Derivative (SVD) sesuai persamaan (65) dan adalah anomali gayaberat sebagai data input. Berikut Gambar 27 merupakan contoh operator filter Second Vertical Derivative (SVD).