1
PUI Mekatronika dan Otomasi Industri
PROPOSAL PENELITIAN UNGGULAN TERAPAN
DANA ITS TAHUN 2020
PENGEMBANGAN SISTEM MEKATRONIKA DAN INTERFACE
CERDAS PADA PLATFORM KAPAL (BOAT) OTONOMOUS ITS
Tim Peneliti:
Hendro Nurhadi, Dipl.-Ing., Ph.D. (Teknik Mesin Industri/Fakultas Vokasi)
Fadlilatul Taufany, ST., Ph.D. (Teknik Kimia/Fakultas Teknologi Industri dan Rekayasa Sistem)
Muhammad Lukman Hakim (Teknik Mesin Industri/Fakultas Vokasi)
Dr. Irhamah, S.Si., M.Si. (Statistika/Fakultas Sains dan Analitika Data)
DIREKTORAT PENELITIAN DAN PENGABDIAN KEPADA MASYARAKAT
INSTITUT TEKNOLOGI SEPULUH NOPEMBER
SURABAYA
2020
2 DAFTAR ISI HALAMAN SAMPUL ………... DAFTAR ISI ………. DAFTAR TABEL ………. DAFTAR GAMBAR ………... DAFTAR LAMPIRAN ………. BAB I RINGKASAN ……….
BAB II LATAR BELAKANG ………...
BAB III TINJAUAN PUSTAKA ……….
BAB IV METODE PENELITIAN ………...
BAB V JADWAL DAN RANCANGAN ANGGARAN BIAYA ………..
BAB VI DAFTAR PUSTAKA ……….
BAB VII LAMPIRAN ………...
1 2 3 3 3 4 5 7 11 13 15 16
3
DAFTAR TABEL
Tabel 5.1 Jadwal Pelaksanaan Penelitian ………. 13
Tabel 5.2 Rancangan Anggaran Biaya ………. 14
DAFTAR GAMBAR Fig 1.1 Reference USV ………... 4
Fig 3.1 Contoh Unmanned Surface Vehicle (USV) ………. 7
Fig 3.2 USV system architecture [Dunbabin M. (2009)] ………. 8
Fig 3.3 Global Positioning System (GPS) ……… 8
Fig 3.4 Contoh penggunaan sistem Autopilot (waypoint) ……… 9
Fig 3.5 Pergerakan dan Orientasi Kapal [ Halvorsen.H (2008)] ……….. 10
Fig 3.6 Perlengkapan First Person View (FPV) ………... 10
Fig 4.1 Diagram alir penelitian iBoat ………... 11
Fig 4.2 Work Breakdown Structure Tim Peneliti iBoat ………... 12
DAFTAR LAMPIRAN Lampiran 4 Biodata Tim Peneliti ……….. 16
4
BAB I RINGKASAN
Autonomous adalah sebuah proses dimana objek benda yang menggunakan suatu perangkat elektronik dapat dijalankan secara otomatis tanpa menggunakan suatu alat penggerak (Remote Control). Sebuah kapal tanpa awak (Autonomous Boat) itu sendiri merupakan suatu kapal yang mampu mengendalikan dirinya sendiri tanpa adanya campur tangan manusia dalam sebuah sistem pengendalian.
Dalam pembuatan kapal tanpa awak memiliki bentuk, ukuran serta konfigurasi yang bervariasi. Bentuk kapal yang sering digunakan dalam pembuatan kapal tanpa awak adalah bentuk katamaran yang memiliki dua lambung kapal. Bentuk katamaran sendiri memiliki fungsi lebih dalam bidang keseimbangan yang memudahkan dalam proses manuver kapal tersebut. Pada sistem konfigurasi kontrol kapal tanpa awak memiliki dua variasi utama, variasi pertama yaitu dikontrol melalui pengendali jarak jauh dan variasi kedua adalah kapal yang mampu bergerak secara mandiri (otomatis) berdasarkan program yang dimasukkan kedalam sistem kapal.
Pembuatan kapal tanpa awak ini menggunakan kontroller sebagai sistem utama pengendalian Autonomous yang digunakan untuk pengolahan citra warna serta pengendalian gerak motor dari kapal tanpa awak tersebut. Pada pembuatan kapal tanpa awak ini digunakan untuk keperluan penelitian unggulan ITS, sesuai dengan topik yang dianggkat, penulis memberi tema dari penelitian ini yaitu “Rancang Bangun Autonomous Boat".
Secara ringkas, kita dapat menyimpoulkan menjadi dua kata kunci utama: yakni proses konversi manual-steering menjadi auto-steering; dan proses mengembangan sistim interface feedback sinyal yang dimiliki.
KATA KUNCI 1:
Mengubah Sistim Kemudi Manual menjadi Auto-Steering, atau disebut Auto-Pilot (Autonomous) driven by an Electric Motor, Self-Driving Evolution.
KATA KUNCI 2:
Menyediakan interface controller sistim navigasi: 1. electric motor (engine) READY
2. Compass READY 3. GPS and IMU READY 4. Auto-Steering ENABLE
Luaran yang ditargetkan adalah prototype dan patent. Publikasi ilmiah merupaka luaran opsional.
Quick Details
Hull Material: Aluminum alloy Year Built: 2016
Length (m): 4m Material: Aluminum alloy Model Number: USV-i4000
Oil tank: 70L
Option: ADCP, CTD, Multi-beam or other sensors according to application Max speed: 12-14m/s
5
BAB II LATAR BELAKANG
Latar belakang
Teknologi boat autonomous memiliki sejarah yang cukup panjang. Prototipe pertama yang dapat berfungsi dengan baik diciptakan pada era tahun 2000-an.
Jadi mengapa kita harus melakukan riset rescue boat autonomous? Dalam pengembangan autonomous rescue boat, para peneliti sadar bahwa mereka mereka ingin memecahkan masalah keselamatan dan efisiensinya. Maka dari itu, tujuan utama dilakukan penelitian adalah untuk mencegah atau mengurangi kecelakaan laut, mengurangi waktu orang menuju korban, serta mengurangi emisi karbon.
Sampai saat ini, penelitian mobil autonomous telah menunjukkan hasil yang menjanjikan. Untuknya, diperlukan dukungan lebih dari pemerintah dan masyarakat untuk dapat mengembangkannya lebih lanjut, terutama dari segi finansial dan hukum.
Berikut adalah beberapa keuntungan yang dapat kita peroleh dari penelitian mobil autonomous sebagai analogi:
1. Navigasi turn-by-turn yang lebih baik (umumnya pada GPS, instruksi-instruksi yang disampaikan selama perjalanan dinamakan Turn-by-Turn Navigation)
2. Informasi pemetaan real-time yang lebih baik. Contohnya lokasi penginapan, restoran, pompa bensin, dan lain-lain.
3. Desain jalan yang lebih baik. Kamera pada mobil autonomous dapat membantu memetakan jalan yang “membingungkan” agar dapat diperbaiki, supaya jalannya menjadi lebih aman bagi kita semua. Kamera tersebut juga dapat membantu memonitor kapan garis jalan harus dicat ulang.
4. Rambu-rambu lalu lintas yang baru. Kebanyakan algoritma-algoritma yang digunakan untuk menavigasikan mobil agar dapat berjalan melintasi jalan raya dengan selamat didasarkan pada pengamatan rambu-rambu lalu lintas. Penelitian mobil autonomous memungkinkan kita untuk mengembangkan rambu-rambu lalu lintas baru untuk menciptakan lalu lintas yang lebih aman dan teratur di kemudian hari.
5. Infrastruktur yang baru. Setiap kali mobil jenis ini berjalan, mereka mengumpulkan gigabyte bahkan sampai terabyte data. Bayangkan jutaan mobil mengirimkan data sebesar itu secara terus menerus. Tentunya dibutuhkan pusat data yang baru, yang lebih besar, dan mampu memfilter data-data tersebut secara cepat.
6. Interaksi baru antar manusia dengan komputer. Jika kita ingin membiarkan mobil kita mengemudi sendiri setidaknya selama beberapa waktu, tentunya kita memerlukan metode input baru, seperti input suara, sentuhan, dan gerakan. Tentunya mereka juga perlu diuji melebihi 140.000 mil, jarak yang telah ditempuh Google autonomous car.
Permasalahan
Di Indonesia perkembangan robot penjelajah permukaan air tanpa awak Unmaned Surface Vehicle (USV) dapat dikatakan mengalami kemajuan yang cukup pesat. Terbukti dengan banyaknya industri dalam negeri yang melakukan riset dan produksi terhadap robot penjelajah permukaan air. Kapal cepat tanpa awak merupakan robot penjelajah permukaan air yang melaju menggunakan satu atau dua baling-baling pada bagian belakang kapal. Kapal cepat tanpa awak ini memiliki potensi untuk melaju dengan sangat cepat dan bermanuver dengan stabil. Kemampuan tersebut dapat digunakan untuk melakukan banyak pekerjaan seperti pengintaian dan pengamatan di dalam maupun di permukaan air menggunakan kamera.
Dibalik beberapa kemampuan dan potensi yang dimiliki, kapal cepat tanpa awak (USV) masih dikendalikan menggunakan kendali jarak jauh. Kapal cepat tanpa awak ini masih sepenuhnya dikendalikan oleh manusia. untuk mengendalikan kapal cepat tanpa awak membutuhkan kemahiran yang cukup, apabila pilot tidak mahir maka dikhawatirkan kapal menabrak halangan yang ada pada
6 permukaan air dan akan mengakibatkan pecahnya badan pada kapal dan tenggelam, Yang terburuk kapal lepas dari jangkauan frekuensi kendali jarak jauh. Jika sampai terjadi hal yang seperti itu maka menimbulkan kerugian materil yang cukup besar. Sehingga diperlukan sebuah alat kendali untuk mengontrol pergerakan kapal secara otomatis. Alat tersebut berupa sensor kamera yang dapat mendeteksi citra yang sudah ditetapkan. Citra tersebut diolah menggunakan komputer dan mikrokontroler yang kemudian akan menggerakan motor dan servo.
Rumusan masalah yang akan dibahas penelitian ini adalah sebagai berikut. Secara prinsip, permasalahan yang doiambil dalam penelitian iniada dua, yakni:
1. Mengkonversi manual-steering menjadi auto-steering degan sistim mekatronika
2. Mengembangkan sistim interface sebagai pemberi feedback kepada sistim navigasi dan otonomous.
Tujuan khusus
Secara khusus, tujuan penelitian ini adalah sebagai batu lompatan awal bagi ITS dalam mengembangkan autonomous car.
Urgensi Penelitian
Urgensi dari penelitian ini adalah menjadi solusi dari kemandirian teknologi IR4.0, terutama dalam aplikasi bidang maritim, yakni autonomous rescue boat.
Spesifikasi khusus terkait skema penelitian unggulan terapan ITS ini adalah digunakan sebagai rescue boat. Panjang kurang leboh minimal 3.6 meter.
7
BAB III TINJAUAN PUSTAKA
Unmanned Surface Vehicle (USV)
Unmanned Surface Vehicle (USV) atau Autonomous Surface Vehicle (ASV) merupakan sebuah wahana tanpa awak yang dapat dioperasikan pada permukaan air. (Wikipedia, 2008). USV dikendalikan otomatis dengan memberikan perintah-perintah seperti waypoint, melalui Ground Control Station (GCS). USV dapat mengirimkan data-data dan mengirimkannya ke GCS secara realtime melalui sistem telemetri.
USV dapat digunakan selain sebagai kapal riset juga dapat digunakan sebagai kapal survey, inspeksi keadaan sekitar sungai, survey seismic, operasi penyelamatan dan lain lain. Pemanfaatan USV untuk menjadi kapal- kapal riset sudah dilakukan di beberapa negara, sebagian besar melakukan penelitian di sungai maupun laut lepas secara otomatis, sehingga mereka hanya mengolah data yang dikirim dari USV ke Ground Control Station (GCS). Indonesia merupakan salah satu negara yang sedang banyak melakukan penelitian mengenai Unmanned Surface Vehicle, beberapa penelitian tentang perancangan dan implementasi Unmanned Surface Vehicle yaitu dilakukan oleh Nugroho, G.N. (2011) mengenai perancangan streering sebuah Unmanned Surface Vehicle, dihasilkan sebuah perhitungan yang dapat digunakan dalam mendesain sistem steering dalam hal ini rudder pada sebuah Unmanned Surface Vehicle.
Fig 3.1 Contoh Unmanned Surface Vehicle (USV)
sumber : Jurnal Teknik ITS, Siswandi.B (2012)
Calce A. (2012) membuat penelitian tentang pembuatan rc motorboats yang dimodifikasi sehingga menjadi Unmanned Surface Vehicle (USV) dengan penambahan mikrokontroller Arduino, GPS, Compass Module HMC6352, USB QuickCam Logitech dan komunikasi data menggunakan wireless 802.11g. Hasil dari penelitian yang dilakukan oleh Calce A. (2012) yaitu saat percobaan prototype ini akan melaksanakan perintah terakhir hingga selesai, menerima perintah lain sampai baterai habis, akan tetapi perintah akan bermasalah jika USV hilang kontak dengan base station karena terlalu jauh dari titik awal atau karena sinyal terhalang oleh sesuatu.
Penelitian tentang USV yang digunakan untuk memantau kualitas air dilakukan oleh Dunbabin M. (2009) menghasilkan bahwa USV mampu bernavigasi melewati tempat penampungan air pedalaman yang kompleks.
Tipe USV Catamaran yang telah dimodifikasi tenaga matahari ini mampu mendapatkan informasi kualitas air di seluruh lokasi saat bergerak. Pada USV ini terintegrasi sensor posisi GPS, Laser Scanners, sonars dan kamera yang dapat memudahkan dapat pengoperasian USV di lingungan air yang dangkal dan belum diketahui peta dan juga dapat menghindari rintangan yang diam maupun
8 bergerak. USV dapat mengambil sampel air dan dapat beroperasi di berbagai kondisi cuaca maupun malam hari. USV dapat dikatakan telah melengkapi survei pemantauan yang dilakukan secara manual dengan kelebihan dapat melakukan pengukuran di tempat penyimpanan air dengan jarak ratusan kilometer dari survey yang sudah dilakukan sebelumnya.
Fig 3.2 USV system architecture [Dunbabin M. (2009)]
Sistem Navigasi
Navigasi adalah ilmu pengetahuan dalam menentukan posisi kapal di laut dengan mengemudikan (steering) kapal secara aman dari suatu tempat ke tempat lain. Sistem navigasi biasanya terdiri dari beberapa perangkat digital maupun analog, untuk yang analog biasanya dilengkapi dengan kompas analog yang dapat mengetahui arah mata angin yang berguna sebagai acuan arah kapal, untuk perangkat digital sudah terdapat GPS atau Global Positioning System yaitu sebuah perangkat yang dapat menerima lokasi keberadaan kapal dengan mengacu pada satelit yang bergerak mengitari bumi. GPS menerima data yang dikirim dari satelit berupa data NMEA 0183. NMEA (National Marine Electronics Association) adalah standar yang digunakan dalam pengiriman data gps yang berupa protokol data, garis lintang, garis bujur, ketinggian, dan waktu.
Fig 3.3 Global Positioning System (GPS) (sumber : www.rctimer.com)
Kompas digital juga tergolong perangkat digital dimana pemakaiannya harus diintegrasikan kembali pada sebuah sistem sehingga pembacaan arah mata angin dapat dilakukan dan dapat mengetahui arah kapal.
Perbani C. (2014) melakukan penelitian dengan judul Pembangunan Sistem Penetuan Posisi dan Navigasi berbasiskan sistem Unmanned Surface Vehicle (USV) untuk survei Batimetri dengan spesifikasi alat yang digunakan antara lain USV dengan penggerak Motor Brushless, Ardupilot Mega, sensor GPS, dan sistem Telemetry. Perbani C. menyimpulkan bahwa wahana apung yang dihasilkan memiliki daya apung baik dan lebih stabil jika dimuati dengan beban, telemetri navigasi bekerja
9 dengan maksimum jarak 5 s.d. 10 kilometer line of sight dengan kualitas pengiriman data rata-rata diatas 90%, sistem penjajakan GPS berjalan dengan baik, sistem Auto Navigation / Auto Pilot belum bekerja dengan sempurna, wahana bergerak secara otomatis menuju waypoint yang ditentukan, tetapi gerakan wahana tidak stabil.
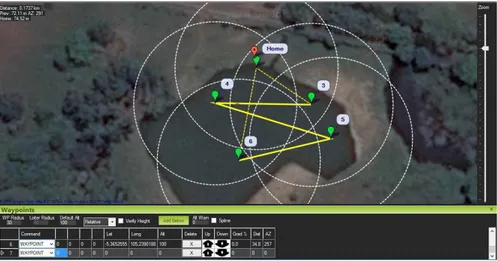
Sistem Autopilot (Waypoint)
Pergerakan kapal yang otomatis termasuk kedalam suatu sistem navigasi. Sistem ini dinamakan Autopilot atau biasa juga disebut dengan waypoint. Sistem Autopilot akan membuat sebuah kapal, dalam hal ini USV, bergerak secara teratur mengikuti titik tuju (waypoint) yang telah diatur pada Ground Control Station.
Fig 3.4 Contoh penggunaan sistem Autopilot (waypoint)
Gambar 3.4 memperlihatkan penggunaan sistem Autopilot dengan memberikan beberapa titik-tuju (waypoint). Wahana yang digunakan akan mengikuti jalur yang telah dihubungkan dari masing-masing titik-tuju (waypoint).
Penelitian sistem navigasi telah dilakukan juga oleh Prasetyo H.P. (2012) tentang Perancangan Sistem Navigasi pada Kapal (MCST-1 Ship Autopilot) untuk mendukung sistem Autopilot. Perancangan sistem yang menggunakan sebuah USV MCST-1, GPS, Compass, Sensor Ultrasonik dan mikrokontroller ini menghasilkan bahwa perancangan yang dilakukan menggunakan data masukan berupa sinyal GPS dengan format NMEA 0183 versi 2 $GPGGA dan $GPRMC dan dapat menampilkan tampilan garis lintang dan bujur. Prasetyo H.P. (2012) juga mengemukakan bahwa perancangan sensor jarak dengan menggunakan sensor ultrasonic dari range 1cm hingga 300cm memiliki persentase akurasi rata-rata sebesar 0.245 dan perancangan pengukuran arah mata angin menggunakan sensor kompas CMPS-03 memiliki tingkat error rata-rata 1.939% dan tingkat akurasi 98.06%. Peletakan sensor kompas berpengaruh jika didekatkan dengan motor penggerak karena adanya interferensi dari motor dalam bentuk medan-elektromagnetik.
Penelitian Taufik A.S. (2013) tentang Sistem Navigasi Waypoint pada Autonomous Mobile Robot menjelaskan bahwa modul CMPS03 Magnetic Compass memiliki akurasi sebesar ±4º, Modul PMB-688 GPS receiver memiliki akurasi sebesar 6,6 meter (radius), dan Sistem navigasi waypoint mampu mengatur gerak autonomous mobile robot dalam pencapaian posisi tujuan dengan akurasi sebesar 11 meter (radius).
Navigasi pada USV juga meliputi pergerakan arah dan orientasi kapal laut. Gambar 2.4 menunjukan bahwa pergerakan kapal laut terdiri dari 3axis yaitu X, Y, dan Z.
Jika kapal mengarah ke arah sumbu X maka dinamakan surge dan apabila terjadi pergerakan atau rotasi pada sumbu X maka dinamakan roll. Kapal laut akan melakukan pergerakan sway jika kapal tersebut bergerak ke arah sumbu Y dan jika berputar pada sumbu Y maka dinamakan pitch. Jika kapal mengarah ke sumbu Z maka dinamakan pergerakan heave jika perputaran atau rotasi terjadi
10 pada sumbu Z maka dinamakan yaw.
Fig 3.5 Pergerakan dan Orientasi Kapal [ Halvorsen.H (2008)]
First Person View (FPV)
First-person View (FPV) atau dikenal juga dengan Remote-person View (RPV) merupakan metode yang digunakan untuk mengontrol sebuah wahana atau kendaraan radio control dari sudut pandang pilot. Sebagian besar FPV digunakan untuk wahana udara tak berawak (UAV) atau pesawat yang memakai radio control. Dengan kamera yang diletakkan tersebut kita dapat merasakan seolah-olah kita berada di dalam wahana tersebut dan melakukan pengendalian wahana dengan mudah. Pergerakan wahana tetap dikendalikan oleh operator secara manual, dengan adanya FPV maka operator dapat mengetahui arah, kondisi sekitar maupun lokasi yang dituju.
Terdapat dua sistem utama dalam penggunaan FPV yaitu komponen perekam diudara dan ground station atau komponen yang berada didarat. Biasanya FPV menggunakan kamera dan video transmitter analog di bagian komponen perekam diudara, dan menggunakan video receiver dan display pada bagian komponen ground station. Tambahan lain untuk FPV yaitu dapat menambahkan On Screen Display (OSD) yaitu sebuah media informasi yang didapat langsung pada layar display, menampilkan Navigasi GPS dan data penerbangan, kestabilan sistem dan sistem Autopilot.
11
BAB IV METODE PENELITIAN
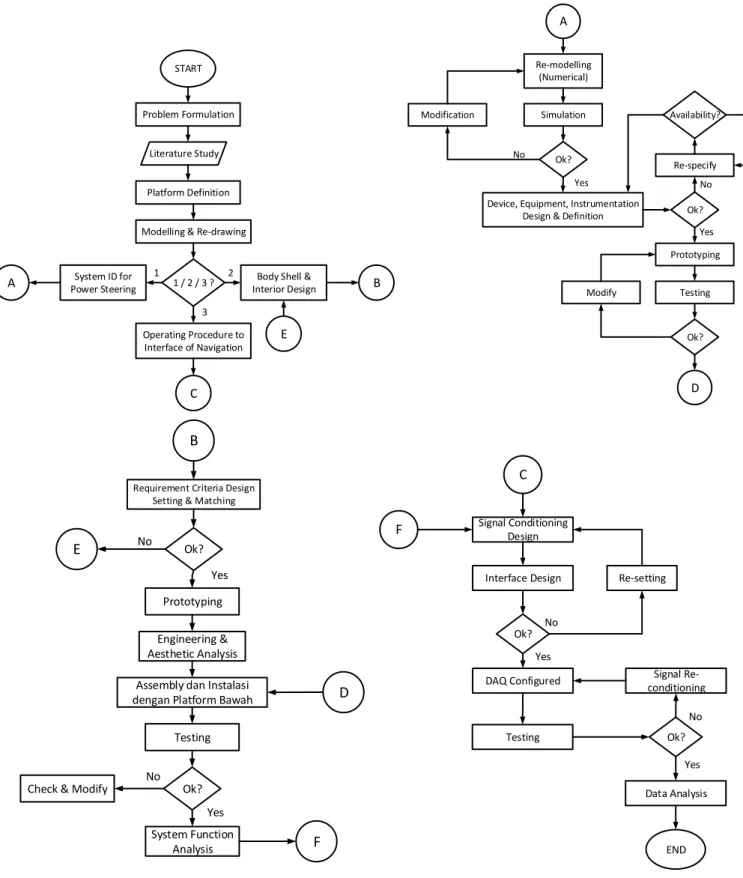
Diagram alir penelitian ditunjukkan oleh figure 4.1 dan struktur organisasi penelitian ini ditunjukkan oleh figure 4.2. Dari kedua gambar didaptkan informasi terkait alur penelitian dari awal hingga akhir, pendekatan yang dilakukan, yakni secara numerik, analitis, simulasi dan eksperimental, serta tergambar tupoksi (tugas pokok dan fungsi) dari setiap anggota peneliti.
START
Problem Formulation
Literature Study
Platform Definition
Modelling & Re-drawing
1 / 2 / 3 ? System ID for
Power Steering
Body Shell & Interior Design Operating Procedure to Interface of Navigation A E B C 1 2 3 A Re-modelling (Numerical) Simulation Ok? Yes No Modification
Device, Equipment, Instrumentation
Design & Definition Ok? Re-specify Availability? Prototyping Testing Ok? Modify D Yes No B
Requirement Criteria Design Setting & Matching
Ok? Yes No E Prototyping Engineering & Aesthetic Analysis Assembly dan Instalasi dengan Platform Bawah
Testing
Ok? Check & Modify
D System Function Analysis F Yes No C
F Signal Conditioning Design
Interface Design Ok? Re-setting DAQ Configured Testing Ok? Signal Re-conditioning Data Analysis END Yes No Yes No
12 Fig 4.2 Work Breakdown Structure Tim Peneliti iBoat
13
BAB V JADWAL DAN RANCANGAN ANGGARAN BIAYA
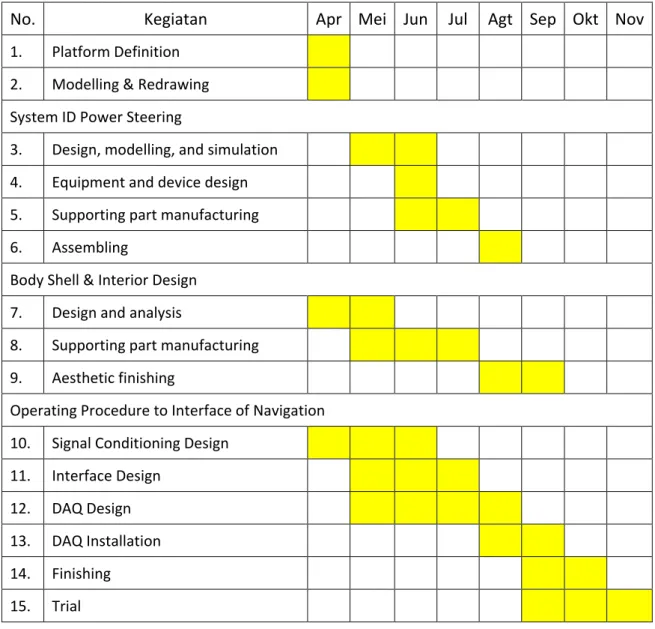
Jadwal Pelaksanaan
Tabel 5.1. Jadwal Pelaksanaan Penelitian
No.
Kegiatan
Apr Mei Jun Jul Agt Sep Okt Nov
1. Platform Definition 2. Modelling & Redrawing System ID Power Steering
3. Design, modelling, and simulation 4. Equipment and device design 5. Supporting part manufacturing 6. Assembling
Body Shell & Interior Design 7. Design and analysis
8. Supporting part manufacturing 9. Aesthetic finishing
Operating Procedure to Interface of Navigation 10. Signal Conditioning Design
11. Interface Design 12. DAQ Design 13. DAQ Installation 14. Finishing 15. Trial
14
Rancangan Anggaran Biaya
Tabel 5.2. Rancangan Anggaran Biaya
15
BAB VI DAFTAR PUSTAKA
Yan, Ru-jian; Pang, Shuo; Sun, Han-bing; Pang, Yong-jie (2010). "Development and missions of unmanned surface vehicle". Journal of Marine Science and Application. 9 (4): 451–457.
doi:10.1007/s11804-010-1033-2.
National Research Council, Division on Engineering and Physical Sciences (5 August 2005). Autonomous Vehicles in Support of Naval Operations. National Academies Press. ISBN 978-0-309-18123-5. Retrieved 15 October 2019.
"USV (UNMANNED SURFACE VEHICLE), APPLICATIONS AND ADVANTAGES". embention.com. Embention. 18 Sep 2015. Retrieved 15 Oct 2019.
Amos, Jonathan (9 May 2019). "Autonomous boat makes oyster run". BBC News. Retrieved 2 Dec 2019.
Carson, Daniel F. (2019). "An affordable and portable autonomous surface vehicle with obstacle avoidance for coastal ocean monitoring". HardwareX. 6: e00059. doi:10.1016/j.ohx.2019.e00059. "The ferry using Rolls-Royce technology that sails itself". BBC News. Finland. 3 Dec 2018. Retrieved 15 Oct 2019.
Manley, Justin E. (2008). "Unmanned Surface Vehicles, 15 Years of Development" (PDF). IEEE Oceanic Engineering Society. Retrieved 14 Oct 2019.
Feather, Andrew (1 Dec 2019). "MDOT: Unmanned sonar-equipped boat to make bridge inspections "safer and more efficient"". WWMT. Michigan, USA. Retrieved 2 Dec 2019.
Stevens Institute of Technology student USV Archived 2010-08-11 at the Wayback Machine "Carbon Wave Glider". Retrieved 24 February 2016.
"Robot Boats Survive Epic Voyage Across the Pacific — So Far". WIRED. 23 May 2012. Retrieved 24 February 2016.
Autonomous Navigation and Obstacle Avoidance of Unmanned Vessels in Simulated Rough Sea States. 18 November 2011. Retrieved 24 February 2016 – via YouTube.
"Robotica - An experimental setup for autonomous operation of surface vessels in rough seas - Cambridge Journals Online". Retrieved 24 February 2016.
16
BAB VII LAMPIRAN
Lampiran 4. Format Biodata Tim iBoat ITS
Biodata Tim Peneliti
1. Ketua
a. Nama Lengkap : Hendro Nurhadi, Dipl.-Ing., Ph.D.
b. NIP/NIDN : 197511202002121002/0020117505
c. Fungsional/Pangkat/Gol. : Lektor Kepala / Penata Tingkat I / III-d
d. Bidang Keahlian : Mekatronika
e. Departemen/Fakultas : Teknik Mesin Industri/Fakultas Vokasi (FV)
f. Alamat Rumah dan No. Telp. : Jalan Mulyosari Utara 15 Surabaya 031-5934667
g. Riwayat penelitian/pengabdian (2) yang paling relevan dengan penelitian yang diusulkan/dilaporkan (sebutkan sebagai Ketua atau Anggota)
: Rancang Bangun Autonomous Surface Vehicle (ASV) Sebagai Transportasi Moda Air Penunjang Industri Transportasi Laut dan Pariwisata Nasional (Ketua)
Rancang Bangun Fire Control System (FCS) Terhadap Pengaruh Faktor
Lingkungan Sebagai Teknologi Pendukung Hankam dalam Pengembangan Produk Komando, Kendali, Komunikasi, Komputasi, Integrasi, Pengamatan, dan Pengintaian (K4IPP) (Ketua)
h. Publikasi (2) yang paling relevan (dalam bentuk makalah atau buku)
: Comparison of Sliding Mode Control and Sliding PID Performance for ITSUNUSA AUV; International Review on Modelling and Simulations (IREMOS), 2018. Preliminary Experimental Study on Designing Ballast System for UNUSAITS AUV; International Review of Mechanical Engineering (IREME), 2018.
Buku Mekatronika Dasar (2019), ITS Press.
2. Anggota
a. Nama Lengkap : Fadlilatul Taufany, ST., PhD
b. NIP/NIDN : 198107132005011001/0013078103
c. Fungsional/Pangkat/Gol. : Lektor / Penata / III-c d. Bidang Keahlian : Oil & Gas Process Engineer
e. Departemen/Fakultas : Teknik Kimia/Fakultas Teknologi Industri dan Rekayasa Sistem
f. Alamat Rumah dan No. Telp. : Rungkut Asri Timur VII/26 Surabaya. 031-8713534/0821-31391690
g. Riwayat penelitian/pengabdian (2) yang paling relevan dengan penelitian yang diusulkan/dilaporkan (sebutkan sebagai Ketua atau Anggota)
: Modifikasi Membran Cellulose
Acetate/Polyethylene Glycol (PEG) untuk Menigkatkan Kinerjanya pada Proses Desalinasi (Anggota Peneliti)
Peningkatan Performansi Polymer
17 dengan Optimasi Desain Geometri dan
Dimensi Channel (Ketua Peneliti) h. Publikasi (2) yang paling relevan (dalam
bentuk makalah atau buku)
: using continuous countercurrent extraction (Malaysian Journal of Fundamental and Applied Sciences; 16/1/2020; DOI: 10.11113/mjfas.v16n1.1439)
Study of packed sieve tray column in ethanol purification using distillation process (Malaysian Journal of Fundamental and Applied Sciences; 15/1/2019; DOI: 10.11113/mjfas.v15n2019.936)
3. Anggota
a. Nama Lengkap : Muhammad Lukman Hakim, S.T., M.T.
b. NIP/NIDN : 1994201911070/0008039401
c. Fungsional/Pangkat/Gol. : III-b
d. Bidang Keahlian : Konversi Energi dan Perancangan Mekanik e. Departemen/Fakultas : Teknik Mesin Industri/Fakultas Vokasi
(FV)
f. Alamat Rumah dan No. Telp. : Desa Banjarsari RT.02 RW.03 Cerme, Gresik / 082244270671
g. Riwayat penelitian/pengabdian (2) yang paling relevan dengan penelitian yang diusulkan/dilaporkan (sebutkan sebagai Ketua atau Anggota)
: -
h. Publikasi (2) yang paling relevan (dalam bentuk makalah atau buku)
: Analisa Numerik pada Backward Facing Step dengan Variasi Jenis dan Jarak Bump Pada Re 3,8 x 104, Tahun 2019,
TEKNOPAS (Jurnal Teknologi Inovasi Terapan STTG)
4. Anggota
a. Nama Lengkap : Dr. Irhamah, S.Si., M.Si.
b. NIP/NIDN : 197804062001122002/0006047803
c. Fungsional/Pangkat/Gol. : Lektor / Penata Tingkat I / III-d d. Bidang Keahlian : Statistika Komputasi
e. Departemen/Fakultas : Statistika/ Fakultas Sains dan Analitika Data (FSAD)
f. Alamat Rumah dan No. Telp. : Jalan Mulyosari Utara 15 Surabaya 031-5934667
g. Riwayat penelitian/pengabdian (2) yang paling relevan dengan penelitian yang diusulkan/dilaporkan (sebutkan sebagai Ketua atau Anggota)
: Hybrid Ant Colony Optimization – Support Vector Machine Untuk Klasifikasi High Dimensional Data (Ketua)
Pengembangan Hybrid Analisis Diskriminan Dan Algoritma Genetika Untuk Penaksiran Parameter Dan Seleksi Variabel Pada Klasifikasi Penyakit Dan Tipe Pasien (Ketua)
h. Publikasi (2) yang paling relevan (dalam bentuk makalah atau buku)
: Classification of pneumonia patients risk using hybrid genetic algorithm-discriminant analysis and NaÏve Bayes (Journal of Theoretical and Applied Information Technology, 2019: Vol.97. No 6)
18 Bayesian mixture model averaging for
identifying the different gene expressions of chickpea (Cicer arietinum) plant tissue (Communications in Statistics - Theory and Methods, 2017: Vol 46, Issue 21)


![Fig 3.2 USV system architecture [Dunbabin M. (2009)]](https://thumb-ap.123doks.com/thumbv2/123dok/4441837.3226476/8.892.276.614.202.434/fig-usv-system-architecture-dunbabin-m.webp)
![Fig 3.5 Pergerakan dan Orientasi Kapal [ Halvorsen.H (2008)]](https://thumb-ap.123doks.com/thumbv2/123dok/4441837.3226476/10.892.271.615.141.435/fig-pergerakan-orientasi-kapal-halvorsen-h.webp)