2.1 Anesthesia
Sebagai referensi awal, dalam Tugas Akhir ini [Suryono Nugroho,1999]
bahwa vaporizer merupakan bagian terpenting dari system pneumatic pada mesin anesthesia Model Major International 400 – Siare. Pada vaporizerlah proses “ pembiusan” dapat diselenggarakan. Namun demikian, pemberian zat anesthesia dengan kadar yang sesuai dengan keadaan pasien masih merupakan hal yang perlu mendapat perhatian atau pengembangan yang lebih serius. Dengan menggunakan Rangkaian Pengendali VBP ( Vaporizer Blood Pressure), maka pemberian kadar gas anesthesia kepada pasien dapat dilakukan lebih mudah. Disebabkan karena setiap ada perubahan tekanan darah (mmHg) pada pasien akan berakibat perubahan “posisi” tabung tekan dan nilai tahanan geser pada catu daya motorservo. Dengan adanya perbedaan arus catudaya diakibatkan perubahan pergerakan motorservo yang mempengaruhi posisi % volume gas anesthesia pada vaporizer.
Pemberian mixture gas ( N2O dan O2 ) sebagai carrier gas
yang masuk ke dalam vaporizer tidak harus mengandung gas N2O. hal ini dalam praktek pembedahan dikaarenakan fungsi gas
N2O hanya sebagai pelengkap fungsi gas anesthesia. Nilai pada
pengendali tabung hanya merupakan nilai perancangan.
Dalam pemberian obat anesthesi dengan menggunakan inhalasi diiringi dengan gas pembawa yaitu : N2O dan O2.
Perbandingan antara N2O : O2 = 2 Lt : 2 Lt. Gas pembawa dan
obat anesthesi tersebut ditempatkan dalam wadah yang disebut Vaporizer.
Gambar 2.1 Vaporizer
Dimana dalam ml obat anesthesi perjamnya dapat dicari dengan rumus :
Sedangkan judul skripsi saya Penentuan Dosis Anesthesia dengan metode Jaringan Syaraf Tiruan.
2.2 Jaringan Syaraf Tiruan ( JST ) A. Analogi Syaraf Biologi
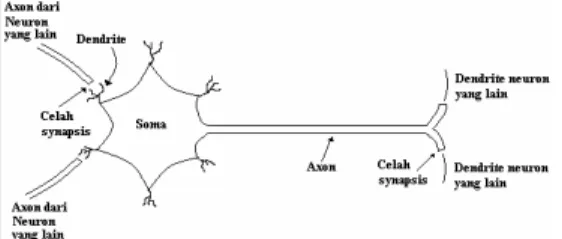
Syaraf biologis memiliki tiga komponen penting yang menjadi perhatian khusus dalam mempelajari syaraf buatan, yaitu dendrites, soma, dan axon. Fungsi dendrites adalah untuk menerima sinyal input dari syaraf yang lain. Sinyal ini berupa impulse elektrik yang ditransmisikan melalui celah synapsis berupa proses kimiawi. Aksi pengirim kimiawi ini akan memodifikasi sinyal yang datang (dengan men-skala frekuensi sinyal yang diterima), serupa dengan aksi pembobotan pada JST.
Ke pasien
Obat Anesthesi Gas
Pembawa
……. 2.1
3 x setting vol ( dosis % ) x gas pembawa permenit (N20 & O2)
Obat Anesthesi ( ml ) 3 x gas pembawa permenit
Soma atau badan sel, mengakumulasikan sinyal yang datang. Ketika jumlah input telah cukup, sel bereaksi dengan mentransmisikan sinyal melalui axon ke sel yang lain. Bereaksi atau tidaknya sel ini dalam waktu yang singkat dapat diumpamakan sebagai sinyal biner. Akan tetapi, frekuensi reaksi sel ini bervariasi.
Transmisi sinyal dari suatu syaraf dilakukan oleh tenaga potensial yang dihasilkan dari differensiasi konsentrasi ion pada sisi luar dari pembungkus axon (zat putih otak). Ion ini mengandung potasium, sodium, dan klorida.
Syaraf biologis secara umum diilustrasikan pada gambar 2.3 . Beberapa kunci untuk membentuk elemen pemroses JST yang disarankan oleh sifat-sifat syaraf biologis yaitu :
1. Elemen pemroses menerima banyak sinyal
2. Sinyal dimodifikasi oleh bobot pada synapsis penerima 3. Elemen pemroses menjumlahkan bobot input.
4. Dalam keadaan yang tepat (input sudah cukup), neuron mentransmisikan input tunggal.
5. Output dari suatu neuron akan menuju ke banyak neuron yang lain.
6. Pemrosesan informasi sifatnya lokal ( walaupun transmisi yang lain, seperti tenaga hormonal, dianggap sebagai keseluruhan proses kontrol ).
7. Memori didistribusikan melalui :
a. Memori panjang yang terdapat pada sinapsis neuron atau bobot.
b. Memori pendek yaitu berhubungan dengan sinyal yang dikirim oleh neuron.
8. Kekuatan sambungan dimodifikasi oleh pengalaman. 9. Transmiter syaraf untuk sinapsis bisa berupa exitatory atau inhibitory.
Gambar 2.2 Syaraf Biologis
Karakteristik penting yang lain pada sistem syaraf biologis adalah masalah toleransi kesalahan. Sistem syaraf biologis memiliki toleransi kesalahan dalam 2 hal. Pertama, kita bisa mengenali banyak sinyal input yang kadang-kadang berbeda dari sinyal input yang kita lihat sebelumnya. Sebagai contoh, kemampuan kita mengenali foto seseorang yang belum kita lihat sebelumnya atau mengenali seseorang setelah dalam waktu yang lama.
Kedua, kita dapat mentoleransi kesalahan sistem syaraf itu sendiri. Manusia dilahirkan dengan jumlah syaraf 100 milyar.Kebanyakan berada di otak dan sebagian besar tidak berganti hingga mati. Meskipun secara kontinu kita kehilangan
syaraf, kita tetap bisa meneruskan belajar. Andaikan terjadi kasus kehilangan syaraf traumatik, syaraf yang lain kadang-kadang bisa dilatih untuk menggantikan fungsi dari sel yang rusak. Dengan cara yang sama, JST dapat didesain untuk tidak terlalu sensitif terhadap kerusakan kecil pada jaringan, dan jaringan dapat dilatih ulang dalam kasus kerusakan yang signifikan.
B Jaringan Syaraf Tiruan
Jaringan Syaraf Tiruan secara formal didefinisikan sebagai generalisasi model matematika sistem syaraf biologi. Sebagai sebuah model, Jaringan Syaraf Tiruan harus memiliki kemampuan sebagai berikut :
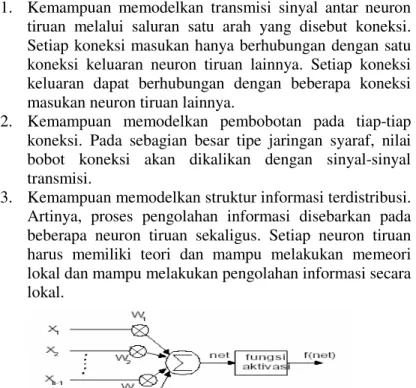
1. Kemampuan memodelkan transmisi sinyal antar neuron tiruan melalui saluran satu arah yang disebut koneksi. Setiap koneksi masukan hanya berhubungan dengan satu koneksi keluaran neuron tiruan lainnya. Setiap koneksi keluaran dapat berhubungan dengan beberapa koneksi masukan neuron tiruan lainnya.
2. Kemampuan memodelkan pembobotan pada tiap-tiap koneksi. Pada sebagian besar tipe jaringan syaraf, nilai bobot koneksi akan dikalikan dengan sinyal-sinyal transmisi.
3. Kemampuan memodelkan struktur informasi terdistribusi. Artinya, proses pengolahan informasi disebarkan pada beberapa neuron tiruan sekaligus. Setiap neuron tiruan harus memiliki teori dan mampu melakukan memeori lokal dan mampu melakukan pengolahan informasi secara lokal.
Gambar 2.3 Model Neuron
Berdasarkan McCulloh-Pitts, membangun model neuron tiruan meniru cara kerja syaraf biologi. Model neuron mempunyai n sinyal masukan, yaitu x1, x2, …, xn dengan x € [0,1]. Masing-masing sinyal tersebut kemudian dimodifikasi oleh bobot sinapsis w1, w2, …, wn sehingga sinyal yang masuk ke neuron adalah net = xi.wn, dengan i = 1, 2, …, n. Selanjutnya neuron akan menghitung hasil penjumlahan seluruh sinyal masukan yang telah dimodifikasi :
...( 2.3 ) ...( 2.4 )
Fungsi aktivasi yang terdapat dalam neuron umumnya berupa fungsi nonlinier. Fungsi aktivasi ini yang menentukan apakah neuron akan mengalami aktivasi atau tidak. Tingkat aktivasinya diwujudkan dalam suatu nilai ambang (thereshold). Fungsi aktivasi yang biasanya digunakan adalah fungsi tangga (step function), fungsi lereng (slope function) dan fungsi sigmoid. Pada model McCulloh-Pitts, fungsi aktivasinya adalah fungsi tangga sehingga :
Dimana θ = nilai ambang (thereshold) C. Arsitektur Jaringan Syaraf Tiruan
Pemodelan struktur pemrosesan informasi terdistribusi dilakukan dengan menentukan pola hubungan antar neuron tiruan (arsitektur). Pola hubungan yang umum adalah hubungan antar lapisan (layer). Arsitektur yang di pakai dalam peneliitian ini adalah Multi-layer Feedforward Network.
Pada tipe ini, diantara lapisan masukan dan keluaran, terdapat satu atau lebih lapisan tersembunyi (hidden layer). Hubungan antar lapisan berlangsung satu arah.
Gambar 2.4 Multilayer Feedforward Network ……..( 2.5 )
D. Pelatihan Supervisi dan Tanpa Supervisi
Berdasarkan cara memodifikasi bobotnya, ada dua macam pelatihan yang dikenal, yaitu dengan supervisi (supervised) dan tanpa supervisi (unsupervised). Pada pelatihan dengan supervisi, terdapat sejumlah pasangan data (masukan – target keluaran) yang dipakai untuk melatih jaringan hingga diperoleh bobot yang diinginkan. Pasangan data tersebut sebagai ‘’guru’’ untuk melatih jaringan hingga diperoleh bentuk yang terbaik. ‘’Guru’’ akan memberikan informasi yang jelas tentang bagaimana sistem harus mengubah dirinya untuk meningkatkan kerjanya.
Pada setiap pelatihan, suatu input diberikan ke jaringan. Jaringan akan memproses dan mengeluarkan keluaran. Selisih antara keluaran jaringan dengan target (keluaran yang diinginkan) merupakan kesalahan yang terjadi. Jaringan yang memodifikasi bobot sesuai dengan kesalahan tersebut. Jaringan dengan model backpropagation merupakan salah satu model yang menggunakan pelatihan dengan supervisi.
Sebaliknya, dalam pelatihan tanpa supervisi (unsupervised learning) tidak ada ‘’guru ‘’ yang akan mengarahkan proses pelatihan. Dalam pelatihannya perubahan bobot jaringan dilakukan berdasarkan parameter tertentu dan jaringan dimodifikasi menurut ukuran parameter tersebut. Sebagai contoh, dalam model jaringan kompetitif, jaringan terdiri dari dua layar, yaitu layar input dan layar kompetisi. Layar input menerima data eksternal. Layar kompetitif berisi neuron-neuron yang saling berkompetisi agar memperoleh kesempatan untuk merespon sifat-sifat yang ada dalam data masukan. Neuron yang akan memenangkan kompetisi akan memperoleh sinyal yang berikutnya diteruskan. Bobot neuron pemenang akan dimodifikasi sehingga lebih menyerupai data masukan.
Sebagai ilustrasi, pelatihan dengan supervisi dapat diandaikan sebagai skripsi yang dibimbing oleh seorang dosen. Pada setiap kali pengumpulan berkas skripsi, dosen akan
mengkritik, mengarahkan dan meminta perbaikan agar kualitas skripsi meningkat. Sebaliknya, dalam pelatihan tanpa supervisi dapat dibayangkan sebagai skripsi tanpa dosen pembimbing. Mahasiswa mengerjakan skripsi sebaik-baiknya berdasarkan ukuran tertentu (misal dibandingkan dengan skripsi yang sudah ada sebelumnya atau dibandingkan dengan hasil skripsi temannya).
Berdasarkan hasil yang pernah dilaporkan, model pelatihan dengan supervisi lebih banyak digunakan dan terbukti cocok dipakai dalam berbagai aplikasi. Akan tetapi kelemahan utama pelatihan dengan supervisi adalah dalam hal pertumbuhan waktu komputasinya yang berorder eksponensial. Ini berarti untuk data pelatihan yang cukup banyak, prosesnya menjadi lebih lambat.
E. Algoritma Levenberg Marquardt
Algoritma pembelajaran yang digunakan dalam penelitian ini adalah algoritma Levenberg Marquardt dalam
Norgaard,2000. Meskipun algoritma ini lebih kompleks
dibandingkan algoritma backpropagation, tetapi algoritma ini dapat memberikan hasil yang lebih baik, terutama pada proses dengan orde banyak (lebih dari satu). Penurunan algoritma ini dapat dijelaskan sebagai berikut :
Data training adalah satu set input u(k) yang berpasangan dengan output yang diinginkan y(k) atau dapat ditulis :
Tujuan pembelajaran ini menentukan bobot yang mungkin dari pasangan data yang diberikan :
ZN→ w
Sehingga jaringan akan mengeluarkan perkiraan output yˆ(k) yang sama atau mendekati output y(k). Perkiraan error akan didekati dengan mean square error criterion:
Bobot yang diperoleh :
Dimana, w(i) adalah bobot saat ini, f(i) adalah arah pencarian dan
µ(i)
adalah besar langkah (step size).
Levenberg Marquardt adalah metoda standar untuk meminimialisasi mean square error criterion. Pada algoritma ini mempunyai parameter λ untuk menjaga konvergensi. Harga λ
dikendalikan dengan rasio antara penuruan harga aktual dan harga prediksi. Adapun rasio tersebut dapat dinyatakan pada persamaan 2.9 sebagai berikut: dimana : (2.7)
[
] [
]
∑
− − − = y k y k w y k y k w N w L Z w VN N i ( ) ˆ( | )T ( ) ˆ( | 2 1 ) ( ) , ( () (2.9) ) ( ) ( ) ( ) 1 (i i i i f w w + = +µ
(2.8) ) , ( min arg N N w Z w V w= (2.10) ) ) ( ) ( ( ) ( ) , ) ( ( ) , ) ( ) ( ( ) , ) ( ( ) ( i f i w i L N Z i w N V N Z i f i w N V N Z i w N V i r + − + − = (2.11) f i w R T f i w G T f N Z i w N V i f i w L ( ()) 2 1 ) ) ( ( ) , ) ( ( ) ) ( ) ( ( + = + +G menunjukan gradien kriteria dengan mengacu pada bobot dan R adalah pendekatan dari Hessian. Jika rasio mendekati satu, L(i) (w(i) + f) mendekati VN, dan λ seharusnya dikurangi dengan
beberapa faktor. Begitu juga sebaliknya jika rasio kecil atau negatif maka λ sebaiknya ditambah.
Algoritma Levenberg Marquardt dapat di ringkas sebagai berikut: a. Pilih vektor bobot awal w(0) dan harga awal λ(0)
. dimana w adalah bobot dan λ diberikan harga awal
b. Tentukan arah pencarian:
maka diperoleh f dan dimasukkan ke : ) Z , w ( V min arg w N N w = ) i ( ) i ( ) i ( ) 1 i ( f w w + = +µ Jika VN ( w(i) + f(i), Z
N
) < VN ( w(i), Z N
) sehingga memenuhi w(i+1) = w(i) + f(i) sebagai iterasi baru maka λ(i+1) = λ(i). Jika tidak maka mencari λ baru dari harga r:
) ( ) , ( ) , ( ) , ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( i i i N i N N i i N N i N i f w L Z w V Z f w V Z w V r + − + − =
Jika r(i) > 0.75 maka λ(i)
= λ(i)
/2. Jika r(i) < 0.25 maka λ(i)
= 2 λ(i) . Dimana : f w R f w G f Z w V f w L i i N i N T i T ( i ) 2 1 ) ( ) , ( ) ( ()+ () = () + () + ()
[
] [
]
∑
− − − = yk yk w yk yk w N w L Z w VN N i ( ) ˆ( | )T ( ) ˆ( | 2 1 ) ( ) , ( ()c. Jika kriteria tercapai, maka perhitungan berhenti. Jika kriteria belum tercapai maka mengulangi langkah no 2.
F. Jaringan Syaraf Tiruan Sebagai Dasar Sistem Kontrol Contoh lain penerapan Jaringan Syaraf Tiruan adalah penerapannya dalam suatu sistem kontrol. Karakteristik Jaringan Syaraf Tiruan sebagai sistem nonlinier adalah sesuai bagi penerapan pada sistem kontrol.
Secara garis besar penerapan Jaringan Syaraf Tiruan pada sistem kontrol nonlinier dapat dibedakan menjadi :
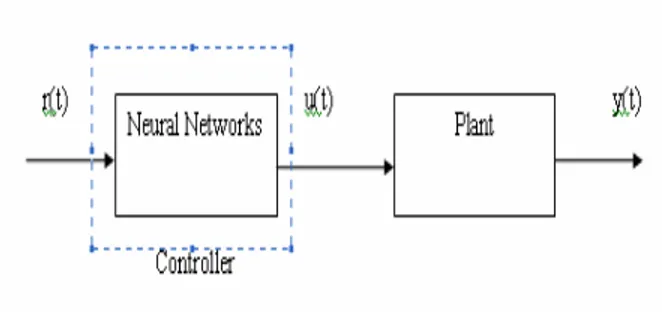
1. Desain sistem kontrol langsung (Direct control system design)
Pada desain sistem kontrol langsung, Jaringan Syaraf Tiruan akan digunakan sebagai pengendali nonolinier secara langsung. Artinya, Jaringan Syaraf Tiruan akan membangkitkan sinyal kontrol yang diaplikasikan pada plant.
Gambar 2.5 Blok diagram sistem kontrol langsung
Beberapa aplikasi dari desain sistem kontrol langsung adalah :
• Direct Inverse Control
• Internal Model Control (IMC) • Optimal Control
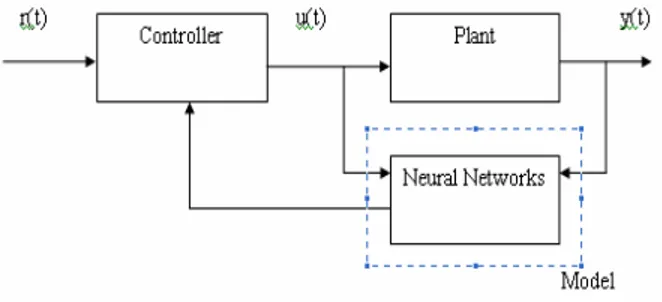
2. Desain sistem kontrol tidak langsung (Indirect control system design)
Pada desain sistem kontrol tidak langsung, Jaringan Syaraf Tiruan akan lebih digunakan sebagai model proses nonlinier daripada pengendali nonlinier. Oleh karena itu, desain adalah sistem kontrol berbasis model. Artinya, sebuah model digunakan secara eksplisit dalam perhitungan untuk mendapatkan sinyal kontrol yang diaplikasikan pada plant.
Gambar 2.6 Blok diagram sistem kontrol tidak langsung
Beberapa aplikasi dari desain sistem kontrol tidak langsung adalah :
• Nonlinier Model Predictive Control