Studi Awal Penggunaan Modul GPS Murah untuk
Pengukuran RTK NTRIP
Dedi Atunggal, Abdul Basith, Catur Aries Rokhmana, Dasita Meygan Pratiwi
Jurusan Teknik Geodesi dan Geomatika, Fakultas Teknik, Universitas Gadjah MadaTel: +62 274 520226 Fax: +62 274 520226 http://www.geodesi.ugm.ac.id Intisari
Industri perangkat board GPS dan modul GPS murah dewasa ini semakin berkembang. Pada awalnya perangkat-perangkat ini digunakan untuk penentuan posisi pada kendaraan dan wahana tanpa awak (unmanned vehicle) seperti pada Unmanned Survey Vessel (USV) atau Unmanned Aerial Vehicle (UAV). Perangkat-perangkat tersebut memiliki spesifikasi dan fitur yang memungkinan penentuan posisi teliti menggunakan berbagai macam metode seperti; static post-processing, kinematic post-processing maupun real-time kinematic GPS. Pada makalah ini dibahas tentang penggunaan modul GPS murah untuk penentuan posisi metode RTK menggunakan data koreksi dari Continuously Operating Reference Station (CORS) atau yang lebih dikenal dengan istilah Networked Transported RTCM via Internet Protocol (NTRIP).
Kata Kunci: modul GPS, program RTK, RTK NTRIP, akurasi, presisi Abstract
Nowadays, the industry of low-cost GPS board and module is growing. At first these devices are used for positioning of mobile vehicles and unmanned vehicle (unmanned vehicle) e.g. the Unmanned Survey Vessel (USV) or Unmanned Aerial Vehicle (UAV). These devices have the specifications and features that allow the application of accurate positioning using various methods such as; static post-processing, kinematic post-processing and real-time kinematic GPS. This paper discussed the use of low-cost GPS module for real-time kinematic GPS using RTK correction data from Continuously Operating Reference Station (CORS), better known by the term Networked Transported RTCM via Internet Protocol (NTRIP).
Keywords: GPS modul, RTK program, RTK NTRIP, accuracy, precision Pendahuluan
Inovasi pada teknologi penentuan posisi GPS berjalan dengan sangat cepat, baik pada peralatan GPS tipe geodetik, tipe pemetaan maupun tipe navigasi. Selain tiga tipe GPS tersebut, dalam lima tahun terakhir perangkat-perangkat GPS low-cost/murah juga mengalami perkembangan yang siginifikan. Perangkat-perangkat GPS murah ini biasanya berbentuk board GPS dan modul GPS atau yang sering disebut sebagai Original Equipment
Manufacturer (OEM) GPS. Pada awalnya, peralatan
tersebut dikembangkan untuk memberikan solusi pengukuran dengan akurasi memadai dan dengan harga yang terjangkau.
Dalam perkembangannya, alat ini sering digunakan untuk penentuan posisi pada kendaraan dan wahana tanpa awak (unmanned vehicle) seperti pada Unmanned
Surface Vessel (USV) atau Unmanned Aerial Vehicle (UAV).
Perkembangan teknologi modul GPS murah sepertinya banyak dipengaruhi oleh meningkatnya penggunaan UAV dan USV untuk berbagai keperluan, mulai dari
surveillance hingga survei pemetaan.
Modul GPS murah memiliki spesifikasi dan fitur yang memungkinan penentuan posisi teliti menggunakan berbagai macam metode seperti; static post-processing,
kinematic post-processing maupun real-time kinematic GPS. Pada makalah ini dibahas tentang studi awal
penggunaan modul GPS murah untuk penentuan posisi metode RTK menggunakan data koreksi dari
Continuously Operating Reference Station (CORS) atau
yang lebih dikenal dengan istilah Networked Transported
RTCM via Internet Protocol (NTRIP).
Potensi masalah teknis yang dihadapi dalam penggunaan GPS murah pada umumnya adalah pada penyusunan sistem serta akurasi yang dihasilkan dari pemanfaatan sistem pada pengukuran riil di lapangan. Dalam Makalah ini dibahas tentang teknis penyusunan sistem RTK menggunakan GPS modul murah yang dikoreksi menggunakan layanan NTRIP dari CORS. Hasil-hasil awal terkait pengujian sistem RTK yang dibuat juga disampaikan dengan tujuan memberikan gambaran performa dari sistem RTK ini.
Tinjauan Pustaka
Kebutuhan akan penentuan posisi yang akurat dengan pembiayaan yang terjangkau telah mendorong banyak peneliti mengembangkan berbagai alternatif solusi, salah satunya penentuan posisi teliti menggunakan modul GPS murah. Penggunaan modul GPS murah diawali oleh Takasu (2009) melalui penemuan RTKLIB yang merupakan kode paket pemrograman berbahasa C yang dapat digunakan sebagai platform standar aplikasi RTK GPS. Paket program ini mendukung komunikasi data melalui komunikasi data protokol serial I/O, TCP/IP dan NTRIP, menggunakan berbagai format koreksi data termasuk RTCM 2.3, RTCM 3.1 dan pesan baku eksklusif untuk beberapa receiver GPS. Metode resolusi ambiguitas fase yang digunakan oleh RTKLIB adalah metode LAMBDA (Takasu dan Yasuda, 2009). RTKLIB telah mengalami beberapa pengembangan dan penyesuaian. Versi pertama RTKLIB dirilis pada 31 Januari 2009 sedangkan versi terbarunya adalah versi 2.4.3 yang telah dirilis 31 Maret 2015.
Hwang dkk (2012) kemudian mengembangkan aplikasi untuk pemodelan kesalahan pada penentuan posisi RTK GPS berbasis telepon pintar (smartphone). Sementara itu Grieneisen (2012) telah memanfaatkan teknologi RTK GPS untuk penentuan posisi pada pesawat udara kecil (micro aerial vehicle). Selain RTK GPS, penggunaan RTKLIB untuk penentuan posisi teliti menggunakan metode precise point positioning juga telah dikaji oleh Wiśniewski dkk (2013).
Fitur penentuan posisi teliti yang dapat dilakukan dengan menggunakan modul GPS u-blox dapat secara detail di cermati pada u-blox LEI-6 Series Datasheet tahun 2014. Interoperabilitas data hasil penentuan posisi RTK GPS secara umum dan RTK GPS menggunakan modul GPS dapat dilakukan dengan mengacu pada tulisan Lee dkk (2002) tentang standar komunikasi data GPS format
National Marine Electronic Association (NMEA) yang
terbaru. Metodologi
Konsep pengukuran yang dilakukan pada penelitian ini secara umum adalah survei RTK menggunakan koreksi dari CORS atau yang disebut dengan NTRIP. Alat-alat yang digunakan dalam penelitian ini meliputi perangkat keras (hardware) dan perangkat lunak (software). Perangkat keras yang digunakan adalah:
a. Satu unit GPS OEM Ublox seri LEI-6T b. Satu unit tablet android
c. Kabel (Universal Serial Bus) USB to mini USB d. Kabel USB OTG (On The Go)
e. Satu unit komputer/laptop
Perangkat lunak yang digunakan dalam penelitian ini adalah:
a. Aplikasi RTKLIB
b. Aplikasi android RTK+ (berbasis koding RTKLIB)
c. Perangkat lunak U-center
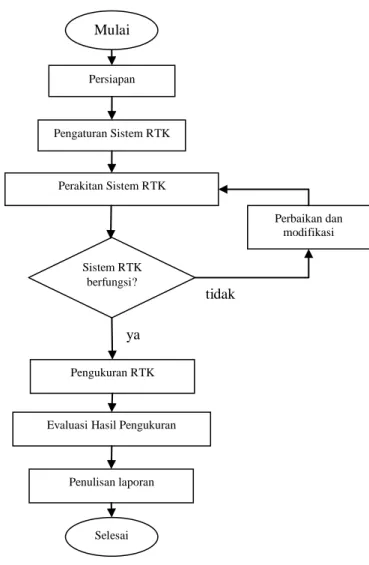
Diagram alir penelitian disajikan pada Gambar 1.
Gambar 1. Diagram alir penelitian
Penelitian dimulai dengan kegiatan persiapan yang meliputi persiapan alat (pengadaan alat utama berupa GPS OEM Ublox seri LEI-6T dan perangkat android). Dilanjut pengunduhan dan pemasangan perangkat lunak U-center pada komputer serta pengunduhan dan pemasangan aplikasi RTK+ pada perangkat android. Pengaturan sistem RTK yang dilakukan pada umumnya terdiri atas 2 tahap yakni pengaturan sistem pada modul GPS dan pengaturan pada aplikasi RTK+. Pengaturan yang dilakukan pada modul GPS meliputi pengaturan komunikasi data protokol serial (serial connection) dan tipe data dengan menggunakan perangkat lunak
U-Pengaturan Sistem RTK Persiapan Perakitan Sistem RTK Pengukuran RTK Mulai Selesai Sistem RTK berfungsi? Perbaikan dan modifikasi tidak
Evaluasi Hasil Pengukuran
Penulisan laporan ya
center. Sedangkan pengaturan pada aplikasi RTK+ meliputi pengaturan komunikasi data dan tipe data (parameternya harus sama dengan pengaturan pada pengaturan modul GPS dari U-center) serta pengaturan yang terkait dengan CORS yang akan digunakan (IP
number, port number, username, dan password)
Kegiatan perakitan sistem RTK dilakukan dengan menyambungkan modul GPS Ublox seri LEI-6T dengan perangkat android dengan menggunakan kabel USB OTG (micro USB to USB) yang disambung dengan kabel USB to mini USB. Antena bawaan modul GPS disambungkan dengan menggunakan konektor mini kabel coaxial. Setelah pengaturan sistem RTK selesai dilaksanakan dan alat sudah terakit kemudian dilanjutkan dengan melakukan tes untuk menguji apakah sistem RTK yang telah disusun dapat berfungsi dengan baik. Apabila terdapat kendala teknis dan sistem RTK tidak berfungsi maka dilakukan cek ulang pengaturan RTK yang terkait dengan komunikasi data dan tipe data modul GPS serta komunikasi data, tipe data pada aplikasi RTK+.
Pengukuran RTK dilakukan untuk menguji apakah sistem RTK yang dibuat dapat digunakan untuk pengukuran secara riil di lapangan. Tahap ini terdiri atas dua pekerjaan yakni: 1. tes penentuan posisi RTK pada titik kontrol yang telah diketahui koordinat tetap-nya dan 2. tes pengukuran pada detil planimetrik. Tes yang pertama dilakukan di titik kontrol Orde-0 N0005 yang terletak di depan gedung DSSDI (Direktorat Sistem dan Sumberdaya Informasi) Universitas Gadjah Mada (Gambar 2). Koordinat yang dijadikan acuan adalah koordinat titik N0005 hasil pendefinisian Sistem Referensi Geospasial Indonesia tahun 2013 (SRGI2013) yang dimuat di laman http://srgi.big.go.id/peta/jkg.jsp milik Badan Informasi Geospasial (BIG).
Gambar 2. Lokasi 1 (tes penentuan posisi sistem RTK di atas titik kontrol N0005)
Tabel 1. Koordinat N0005 (srgi.big.go.id) Koordinat Geodetik N0005 (epoch 2012)
Lintang Bujur Tinggi
-7.773803 110.376794 157.763487
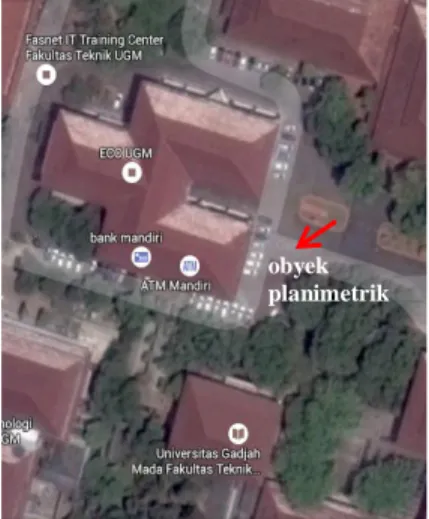
Evaluasi tes pertama dilakukan dengan membandingkan koordinat rerata hasil pengukuran dengan koordinat fix titik N0005 dari SRGI2013 epoch 2012 yang tercantum pada tabel 1. Tes kedua dilakukan dengan mengukur sebuah taman di depan gedung Kantor Pusat Fakultas Teknik (KPFT) Universitas Gadjah Mada (Gambar 3). Tes ini dilakukan untuk mengecek hasil pengukuran RTK secara riil di lapangan pada obyek planimetrik. Lokasi tersebut dipilih dengan pertimbangan karena lokasinya cukup terbuka dan datar sehingga memudahkan pelaksanaan tes.
Gambar 3. Lokasi 2 (tes pengukuran detil planimetrik) Evaluasi untuk tes kedua dilakukan dengan beberapa langkah sebagai berikut; melihat secara visual hasil pengukuran (metode RTK dan absolute positioning) di atas Google Maps (satellite image view), membandingkan hasil jarak antara dua titik pengamatan RTK dengan pengukuran jarak langsung menggunakan pita ukur. Satu hal yang perlu disadari bahwa citra satelit pada Google Maps juga tidak lepas dari kesalahan, namun demikian menampilkan hasil pengukuran di atas citra tersebut dapat memberikan gambaran umum hasil penentuan posisi RTK yang dilakukan.
Hasil dan Pembahasan
Hasil dan pembahasan pada makalah ini meliputi; hasil rangkaian sistem RTK, hasil ujicoba fungsi sistem RTK hasil pengukuran RTK, dan evaluasi hasil pengukuran RTK. obyek planimetrik yang diukur N0005
1. Hasil rangkaian sistem RTK
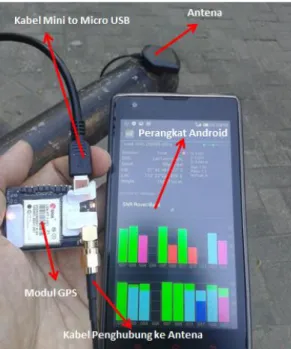
Hasil rangkaian prototip sistem RTK disajikan pada Gambar 4. Dari gambar tersebut dapat dilihat bahwa secara umum tidak sulit untuk merangkai sistem RTK menggunakan modul GPS u-blox LEI-6T yang terkoneksi dengan aplikasi RTK+ pada perangkat android.
Dari rangkaian tersebut juga dapat dilihat bahwa ke depan perlu didesain wadah (case) untuk melindungi modul receiver, mengingat modul tersebut terangkai dalam sebuah printed circuit board (PCB) kecil yang rawan rusak karena terbentur atau jatuh. Ada baiknya juga didesain holder untuk men-setup perangkat android dan antena agar bisa dengan nyaman digunakan saat pengukuran. Hal-hal ini perlu dilakukan mengingat pada prakteknya sistem ini akan digunakan pada pengukuran di lapangan yang memerlukan kemudahan dalam melakukan sentering, pengukuran maupun perpindahan antar titik pengamatan.
Gambar 4. Rangkaian prototip sistem RTK 2. Hasil uji coba fungsi sistem RTK
Sistem RTK yang telah dibuat telah diuji coba untuk digunakan dalam pengukuran. Setelah semua alat tersambung dan difungsikan lampu indikator pada modul GPS langsung menyala dan berkedip. Setelah itu sistem secara umum akan memerlukan sekitar 1-5 menit untuk melakukan inisialisasi penentuan posisi.
Setelah proses inisialisasi berhasil dilakukan maka akan muncul koordinat dan tipe solusi pengukuran yang dihasilkan. Pada umumnya koordinat yang muncul pada awalnya merupakan koordinat dengan tipe solusi absolute/standalone, kemudian dilanjut dengan koordinat dengan solusi RTK float dan atau
fixed. Waktu yang dibutuhkan untuk mendapatkan
solusi RTK bergantung pada keterbukaan pandangan langit (sky view) lokasi pengamatan dan kelancaran komunikasi data internet yang digunakan. Pada eksperimen ini inisialisasi memerlukan waktu sekitar 1 menit karena lokasi terbuka dan komunikasi data relatif lancar. Contoh tampilan aplikasi RTK+ pada saat pengukuran disajikan pada Gambar 5.
Gambar 5. Tampilan pengamatan RTK Bagian atas tampilan aplikasi RTK+ memperlihatkan koordinat hasil penentuan posisi RTK dan kualitas solusi pengukurannya (float atau fixed). Bagian bawah tampilan RTK+ memperlihatkan grafik signal to noise
ratio (SNR) dari base (CORS) dan rover. Tampilan
grafik ini dapat dirubah menjadi tampilan lain sesuai kebutuhan pengguna (misal, skyplot, baseline, koordinat dan sebagainya)
3. Hasil Pengukuran RTK
Hasil pengukuran dapat disimpan dalam beberapa format data. Contoh cuplikan data hasil pengamatan RTK dalam format NMEA ditampilkan pada Gambar 4.
Gambar 4. Cuplikan data pengamatan RTK format NMEA
Sesuai dengan cuplikan yang ditampilkan Gambar 4, data pengamatan secara berurutan berisi Tanggal,
GPS Time (GPST), koordinat (lat/long), tinggi (height), solution quality, jumlah satelit, standar deviasi posisi,
usia koreksi RTK dan ratio pengukuran RTK. Informasi terkait solusi pengukuran RTK (float dan
fixed) sangat bermanfaat untuk analisis data.
Tes penentuan posisi di atas titik N0005 dilakukan beberapa kali dengan durasi masing-masing pengukuran sekitar 1 jam. Dari seluruh pengamatan yang dilakukan, solusi pengukuran RTK yang dihasilkan dominan float (Gambar 5). Mengingat lokasi pengamatan yang terbuka (minim vegetasi dalam radius 20 meter), solusi yang dominan float ini kemungkinan diakibatkan oleh sinyal pantulan detil reflektif di sekitar lokasi pengamatan (gedung, pagar, jalan aspal dan lain-lain)
Gambar 5. Hasil penentuan posisi di titik N0005 Dari hasil yang disajikan pada Gambar 5 dapat diketahui bahwa posisi yang dihasilkan dari solusi
float RTK dengan sistem ini masih sangat divergen
untuk 10 menit pertama. Namun demikian pada periode berikutnya hingga menit ke 60 solusi sudah mulai konvergen dan mendekati nilai koordinat fix titik N0005 dari SRGI2013 epoch 2012. Nilai rata-rata koordinat hasil pengukuran float tersebut hanya berselisih 20cm dari titik N0005.
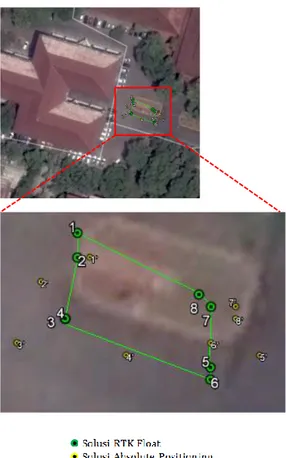
Solusi pengukuran yang masih dominan float dan memiliki akurasi desimeter sebenarnya belum ideal untuk digunakan untuk pengukuran detil planimetrik. Namun demikian pengukuran tetap dilaksanakan untuk mendapatkan gambaran riil hasil penentuan posisi RTK sistem ini untuk pemetaan detil. Pada Gambar 6 ditampilkan hasil tes pengukuran detil planimetrik. Seperti yang sudah diperkirakan sebelumnya bahwa belum kovergennya solusi dapat mengakibatkan hasil yang didapat bisa sangat berbeda dengan hasil pada tes pertama (penentuan posisi pada titik tetap). Terlihat secara visual pada Gambar 6 bahwa bentuk taman yang seharusnya teratur menjadi terdistorsi karena setiap titik pojok taman yang diukur dengan sistem RTK ini didapat solusi float dengan ketelitian pada level desimeter. Namun demikian jika dibandingkan dengan solusi
absolute positioning tentu saja sistem RTK ini sudah
memberikan solusi penentuan posisi yang jauh lebih baik.
Gambar 6. Hasil pengukuran detil planimetrik 10 menit pertama
4. Evaluasi Hasil Pengukuran RTK
Dari hasil-hasil yang telah disampaikan sebelumnya terlihat bahwa untuk meneliti performansi dari penentuan posisi menggunakan modul GPS murah dengan memanfaatkan koreksi RTK NTRIP dari CORS masih memerlukan kajian yang lebih mendalam. Dari eksperimen sederhana pada tes penentuan posisi pada titik kontrol N0005 dan pengukuran detil planimetrik didapat dua hasil yang agak berbeda dimana pada tes pertama penentuan posisi dengan sistem RTK ini menunjukkan ketelitian yang cukup baik (20cm untuk solusi float) namun pada tes pengukuran detil planimetrik didapatkan hasil dengan ketelitian lebih rendah
Penutup
Dari studi awal tentang penggunaan modul GPS U-Blox seri LEI-6T yang telah dilakukan dapat disimpulkan bahwa akurasi yang dihasilkan oleh sistem RTK menggunakan GPS modul murah pada solusi fixed dan
float berkisar pada level sentimeter hingga desimeter.
Solusi RTK yang dihasilkan dominan float. Ini kemungkinan disebabkan oleh antena bawaan modul GPS yang sangat rawan terhadap multipath. Diperlukan studi lebih lanjut untuk mengevaluasi penggunaan antena dengan kualitas yang lebih baik dibanding antena bawaan pada sistem RTK GPS modul murah.
Ucapan terima kasih disampaikan kepada Kantor Pertanahan Kabupaten Bantul, Badan Pertanahan Nasional, untuk penggunaan koreksi CORS dari
mountpoint Bantul Jaring Referensi Satelit Pertanahan.
Daftar Pustaka
Grieneisen, D., 2012, Real Time Kinematic GPS for Micro
Aerial Vehicle.
Hwang, J., Yun, H., Cho, J., Lee, D., 2012, Development of
an RTK-GPS Positioning Application with an Improved Position Error Model for Smartphones,
Multidisciplinary Digital Publishing Institute (MDPI), Published online Sep 25 2012.
Takasu, T., Yasuda, A., 2009, Development of the low-cost
RTK-GPS receiver with an open source program package RTKLIB, International Symposium on GPS/GNSS, International Convention Center Jeju, Korea, November 4-6, 2009
Takasu, T., 2009, RTKLIB: Open Source Program Package for RTK-GPS, FOSS4G 2009 Tokyo, Japan, November 2, 2009.
u-blox, 2014, LEA-6 GPS Module Data Sheet, November 27 2014.
Wiśniewski, B., Bruniecki, K., Moszyński, M., 2013,
Evaluation of RTKLIB's Positioning Accuracy Using Low-cost GNSS Receiver and ASG-EUPOS, the
International Journal on Marine Navigation and Safety of Sea Transportation Vol. 7 No. 1 March 2011.
Lee, A., Anderson, L., Cassidy, F., 2002, NMEA 2000 A
Digital Interface for the 21st Century, Institute of
Navigation’s 2002 National Technical Meeting January 30, 2002 in San Diego, California.