DESAIN DAN ANALISIS KENDALI SISTEM SUSPENSI MENGGUNAKAN PID DAN LOGIKA FUZZY DENGAN SIMULINK MATLAB
Teks penuh
Gambar





Dokumen terkait
Dalam perancangan fuzzy logic dapat disimpulkan bahwa pengujian yang dilakukan dengan input jarak 12 dan waktu 12 maka diperoleh kecepatan 850 rpm sedangkan untuk
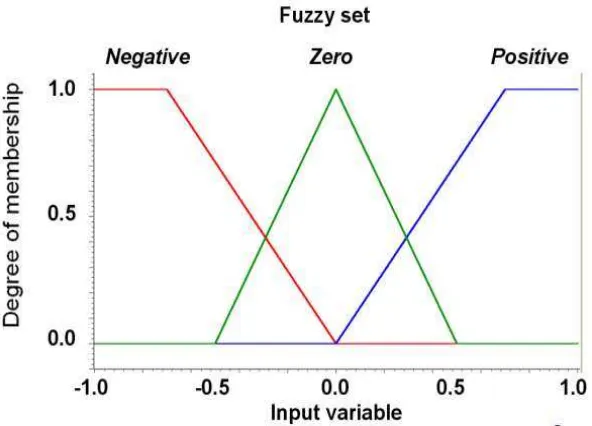
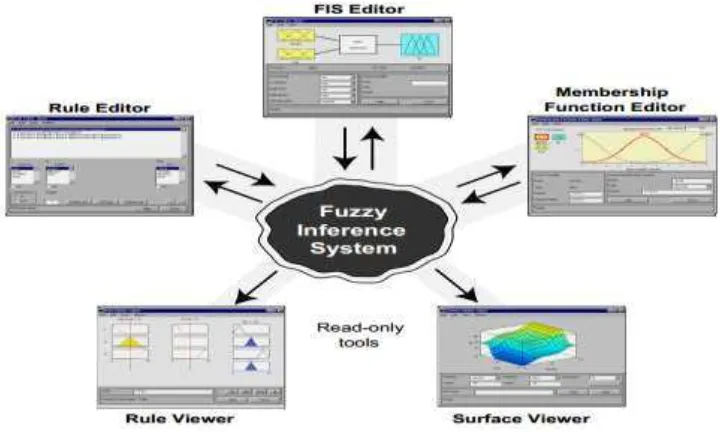
Sistem kendali yang dibangun menggunakan fuzzy logic controller yang dirancang dengan menggunakan Metode Mamdani sistem perancangan pengendalian suhu dan
of Variable Speed Wind Turbine Using Fuzzy Logic Controller” , IJET-.
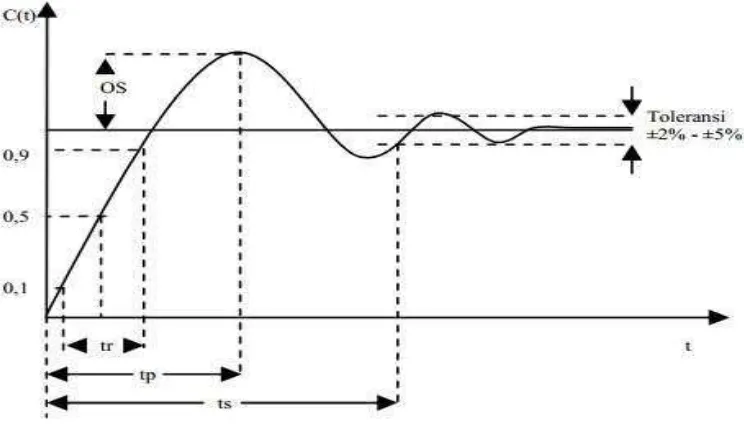
1) Pada masukan berupa tangga satuan ( step ), sistem suspensi aktif yang dirancang dapat menekan harga puncak menjadi 12,57 cm dari 15,71 cm dan waktu mantap
gaussian noise yang ditunjukkan oleh Gambar 4.21 terlihat bahwa sistem masih berada pada daerah toleransi kestabilan dengan performansi kendali logika fuzzy yang lebih
Dengan pembuatan pemodelan dan simulaasi kendali suhu ruangan menggunakan fuzzy dapat digunakan untuk mengangalisa sistem sebelum di terapkan ke dunia nyata, ini
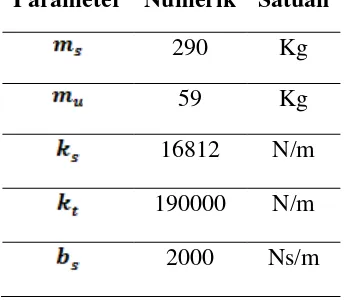
Tujuan penelitian ini adalah merancang suatu sistem suspensi semi-aktif dengan menggunakan sistem kontrol berbasis logika fuzzy pada model kendaraan seperempat dengan peredam
Oleh karena itu, untuk mengatasi masalah tersebut dipilih metode pengaturan kecepatan DTC menggunakan Fuzzy Logic Controller FLC yang tujuannya untuk mengatur batas dari nilai referensi
