PERANCANGAN SISTEM SUSPENSI SEMI-AKTIF
DENGAN PEREDAM NONLINIER
MENGGUNAKAN PENGONTROL FUZZY
TESIS MAGISTER
OLEH:
S U M A R D I
23395020
BIDANG KHUSUS INSTRUMENTASI DAN KONTROL
PROGRAM STUDI TEKNIK FISIKA
PROGRAM PASCA SARJANA
INSTITUT TEKNOLOGI BANDUNG
PERANCANGAN SISTEM SUSPENSI SEMI-AKTIF
DENGAN PEREDAM NONLINIER
MENGGUNAKAN PENGONTROL FUZZY
photo
N a m a
: S u m a r d i
3x4
N I M
: 23395020
Pembimbing
I Pembimbing
II
Dr. Ing. Yul. Y. Nazaruddin
Dr. Bambang SPA
KATA PENGANTAR
Puji sykur kami panjatkan kehadirat Allol SWT karean petunjuk dan kehendakNyalah peneliti dapat menyelesaikan penelitian dengan judul Perancangan Sistem Suspensi Semi-aktif dengan Peredam Nonlinier Menggunakan Pengontrol Fuzzy ini dengan baik.
Dalam kesempatan ini peneliti menghaturkan banyak terima kasih kepada:
1. Dr. -Ing Yul Yunazwin Nazaruddin dan Dr. Bambang SPA sebagai pembimbing I dan pembimbing II, yang telah memberikan bimbingan kepada peneliti dalam menyelsaikan penlitian ini.
2. Prof. Dr. The Houw Liong dan Dr. Ir. Farida I. Muchtadi sebagai penguji I dan penguji II, yang telah menguji peneliti pada ujian akhir Magister Instrumentasi dan Kontrol, ITB.
3. Ibunda tercinta yang telah memberikan do’a restunya kepada peneliti.
4. Istriku tersayang yang telah memberikan dorongan secara moril dan materiil sehingga peneliti dapat segera menyelesaikan penelitian ini.
5. Keluarga Bapak Sudiman yang telah banyak membantu selama peneliti kuliah di Program Magister Instrumentasi dan Kontrol, ITB.
6. Teman-teman mahasiswa Program Magister Instrumentasi dan Kontrol, ITB yang telah memberikan saran-sarannya.
7. Semua pihak yang tidak bisa peneliti sebutkan satu persatu.
Akhirnya peneliti berharap semoga hasil penelitian ini dapat berguna bagi para pembaca, dan kalau ada kesalahan yang dilakukan peneliti baik disengaja maupun tidak mohon dima’afkan.
Bandung, Januari 1998
Ringkasan
Penggunaan komponen pasif pada sistem suspensi kendaraan mempunyai beberapa kelemahan yaitu sistem tidak dapat menyesuaikan dengan kondisi permukaan jalan. Untuk mengatasi masalah tersebut dapat dilakukan dengan menambahkan komponen aktif pada sistem suspensi pasif, yang kemudian lebih dikenal dengan sistem suspensi semi-aktif.
Pada penelitian ini dilakukan perancangan sistem suspensi semi-aktif dengan peredam nonlinier menggunakan Pengontrol Logika Fuzzy. Peredam nonlinier digunakan dengan pertimbangan bahwa pada kenyataannya peredam mempunyai karakteristik yang nonlinier, baik pada saat dirancang maupun akibat lamanya pemakaian. Hasil perancangan dianalisa dengan berbagai kondisi permukaan jalan. Untuk kepentingan simulasi kondisi permukaan jalan diwakili oleh sinyal impuls, sinyal sinusoida dan sinyal random. Model kendaraan yang digunakan adalah model kendaraan seperempat.
Hasil simulasi dengan kondisi permukaan jalan berupa impuls menunjukkan bahwa harga puncak yang dirasakan badan kendaraan dapat diperkecil dari 0,0107 meter pada suspensi pasif menjadi 0,0075 meter pada suspensi semi-aktif. Sementara itu waktu mantap juga mengalami perbaikan dari 3,0631 detik pada suspensi pasif menjadi 0,2890 detik pada suspensi semi-aktif yang dirancang. Demikian juga pada perubahan ketidaklinieran dari peredam yang digunakan, sistem suspensi semi-aktif yang dirancang memberikan kinerja yang lebih baik dibandingkan dengan sistem suspensi pasif.
Selanjutnya, pada kondisi permukaan jalan berbentuk sinusoida sistem suspensi semi-aktif yang dirancang mampu memberikan penurunan percepatan vertikal pada frekuensi di bawah 12,6 rad/det, sehingga faktor kenyamanannya dapat ditingkatkan. Defleksi yang terjadi pada ban dan pada per secara umum juga dapat diperkecil pada semua daerah frekuensi sehingga faktor keamanannyapun dapat lebih baik.
Abstract
The use of passive component in vehicle suspension system has several weaknesses. One of them is that the system cannot adapt to the condition of the road surface. This problem can be solved with addition of an active component to passive suspension system, which is called as semi-active suspension system.
A design of semi-active suspension system having nonlinear damper component using Fuzzy Logic Control is conducted in this research. The nonlinear damper is considered because in general, it has nonlinear characteristics, due to its design condition or the effect of operation time. The results of the design have been analyzed using some different road surfaces, which can be represented by impulse, sinusoidal and random signals during the simulation studies. A quarter car model was used in this investigation.
The results of simulation with the impulse road surface showed that the peak value of the vehicle body can be decreased from 0.0107 meter using passive suspension system to only 0.0075 meter using the designed semi-active suspension system. The steady state response time decreased also from 3.0631 second using passive suspension system to only 0.2890 second using the designed semi-active suspension system. Also, the designed semi-active system gives the better performance for the nonlinearity changes of the damper.
Further, on the sinusoidal form condition of the road surface, the designed semi-active suspension system with nonlinear damper decreased the vertical acceleration at frequency less than 12.6 rad/s, which means that the comfort factor is better. The wheel and the spring deflection, in general, were also decreased in all frequency range, which reflects that the safety factor can be made better.
DAFTAR ISI
Halaman
HALAMAN JUDUL ... i
HALAMAN PENGESAHAN ... ii
KATA PENGANTAR ... iii
RINGKASAN ... iv
ABSTRAK ... v
DAFTAR ISI ... vi
DAFTAR GAMBAR ... viii
DAFTAR TABEL ... x BAB I PENDAHULUAN ... 1 1.1 Latar Belakang ... 1 1.2 Tujuan ... 2 1.3 Pembatasan Masalah ... 2 1.4 Metoda Pendekatan ... 3
BAB II SISTEM SUSPENSI ... 5
2.1 Sistem Suspensi Pasif ... 5
2.1.1 Karakteristik Pegas dan Peredam ... 5
2.1.2 Persamaan Gerak Sistem Suspensi Pasif ... 6
2.1.3 Kestabilan Sistem Suspensi Pasif ... 8
2.1.4 Perbandingan dengan Model dari Penelitian lainnya ... 9
2.1.5 Unjuk Kerja Sistem Suspensi Pasif ... 10
2.1.5.1 Unjuk Kerja Sistem Suspensi Pasif Terhadap Gangguan Impuls ... 10
2.1.5.2 Unjuk Kerja Sistem Suspensi Pasif Terhadap Gangguan Sinusoida .... 14
2.1.5.3 Unjuk Kerja Sistem Suspensi Pasif Terhadap Gangguan Random .... 15
2.2 Persamaan Gerak Sistem Suspensi Semi-Aktif ... 17
BAB III KONTROL LOGIKA FUZZY ... 20
3.1 Teori Himpunan Fuzzy ... 20
3.1.1 Fungsi Keanggotaan ... 21
3.2 Operasi Himpunan Fuzzy ... 22
3.3 Logika Fuzzy ... 23
3.4 Konfigurasi Dasar Kontrol Logika Fuzzy ... 24
3.4.1 Strategi Fuzzifikasi ... 24
3.4.2 Basis pengetahuan ... 25
3.4.2.2 Basis Kaidah Atur ... 26
3.4.3 Logika pengambilan keputusan ... 28
3.4.4 Strategi Defuzzifikasi ... 28
3.5 Sistem Umpan Balik Logika Fuzzy ... 29
BAB IV PERANCANGAN PENGONTROL FUZZY ... 32
4.1 Penentuan Sinyal Kontrol ... 32
4.2 Penyusunan Basis Data ... 32
4.3 Penyusunan Basis Kaidah ... 35
4.4 Defuzifikasi ... 36
4.5 Kestabilan dalam Pengontrol Fuzzy ... 36
BAB V HASIL SIMULASI DAN ANALISA ... 38
5.1 Unjuk Kerja Sistem dengan Gangguan Impuls ... 38
5.1.1 Pengaruh Perubahan Harga Koefisien Peredam (bs ) Terhadap Gangguan Impuls. 39 5.1.2 Pengaruh Perubahan Harga Koefisien Kekakuan Pegas (ks) Terhadap Gangguan Impuls ... 39
5.1.3 Pengaruh Perubahan Harga Massa Kendaraan (Ms) Terhadap Gangguan Impuls . 40 5.1.4 Pengaruh Perubahan Harga Massa Ban (Mu ) Terhadap Gangguan Impuls ... 41
5.1.5 Pengaruh Perubahan Koefisien Peredam (c) Terhadap Gangguan Impuls ... 41
5.2 Unjuk Kerja Sistem dengan Gangguan Sinusoida ... 43
5.3 Unjuk Kerja Sistem dengan Gangguan Random ... 44
5.4 Faktor Keamanan dan Kenyamanan ... 45
5.4.1 Faktor Keamanan ... 45 5.4.2 Faktor Kenyamanan ... 45 BAB VI PENUTUP ... 47 6.1 Kesimpulan ... 47 6.2 Saran ... 47 DAFTAR PUSTAKA LAMPIRAN
DAFTAR GAMBAR
Halaman
Gambar 1.1 Suspensi pasif ... 3
Gambar 1.2 Konfigurasi dasar Kontrol Logika Fuzzy ... 4
Gambar 2.1 Karakteristik pegas ... 5
Gambar 2.2 Karakteristik peredam ... 6
Gambar 2.3 Perbandingan respons sistem dengan model yang digunakan ... 10
Gambar 2.4 Defleksi pada badan kendaraan (Zs) untuk harga parameter nominal ... 11
Gambar 2.5 Defleksi pada badan kendaraan (Zs) untuk berbagai harga koefisien peredam (bs) ... 12
Gambar 2.6 Defleksi pada badan kendaraan (Zs) untuk berbagai harga koefisien kekakuan pegas (ks) ... 12
Gambar 2.7 Defleksi pada badan kendaraan (Zs) untuk berbagai harga massa kendaraan (Ms) ... 13
Gambar 2.8 Defleksi pada badan kendaraan (Zs) untuk berbagai massa ban (Mu) ... 13
Gambar 2.9 Defleksi pada badan kendaraan (Zs) untuk berbagai koefisien Peredam (c) ... 13
Gambar 2.10 Defleksi rata-rata badan kendaraan untuk gangguan sinusoida ... 15
Gambar 2.11 Defleksi rata-rata per untuk gangguan sinusoida ... 15
Gambar 2.12 Sinyal gangguan random dengan amplituda 0,1 meter ... 16
Gambar 2.13 Amplituda defleksi badan kendaraan dengan masukan sinyal random dengan amplituda 0,1 meter ... 16
Gambar 2.14 Sinyal gangguan random dengan amplituda 0,03 meter ... 16
Gambar 2.15 Amplituda defleksi badan kendaraan dengan masukan sinyal random dengan amplituda 0,03 meter ... 17
Gambar 2.16 Suspensi semi-aktif ... 17
Gambar 2.17 Gambar skematis peredam variabel ... 18
Gambar 3.1 Himpunan fuzzy dan fungsi keanggotaannya ... 20
Gambar 3.2 Fungsi - S ... 21
Gambar 3.3 Fungsi - π ... 22
Gambar 3.4 Fungsi - T (segitiga) ... 22
Gambar 3.5 Hubungan antara variabel, label dan tingkat keanggotaan dalam himpunan fuzzy ... 25
Gambar 3.6 Sistem kontrol lup tertutup dengan Kontrol Logika Fuzzy ... 30
Gambar 3.7 Sistem dengan respons step ... 30
Gambar 4.1 Sistem kontrol ... 32
Gambar 4.2 Fungsi segitiga ... 33
Gambar 4.3 Fungsi keanggotaan dan variabel linguistik ... 33
Gambar 4.4 Fungsi keanggotaan untuk himpunan fuzzy dengan nilai linguistik paling kecil dan paling besar ... 34
Gambar 4.5 Fungsi keanggotaan dan variabel linguistik untuk E ... 34
Gambar 4.6 Fungsi keanggotaan dan variabel linguistik untuk DE ... 34
Gambar 4.7 Fungsi keanggotaan dan variabel linguistik untuk U ... 35
Gambar 5.1 Defleksi badan kendaraan (Zs) untuk suspensi pasif dan suspensi semi-aktif dengan gangguan impuls ... 38
Gambar 5.2 Pengaruh perubahan koefisien peredam (bs) pada defleksi badan kendaraan (Zs) dengan gangguan impuls ... 39
Gambar 5.3 Pengaruh perubahan koefisien kekakuan pegas (ks) pada defleksi badan kendaraan (Zs) dengan gangguan impuls ... 40
Gambar 5.4 Pengaruh perubahan massa kendaraan (Ms) pada defleksi badan kendaraan (Zs) dengan gangguan impuls ... 41
Gambar 5.5 Pengaruh perubahan massa ban (Mu) pada defleksi badan kendaraan (Zs) dengan gangguan impuls ... 41
Gambar 5.6 Pengaruh perubahan koefisien peredam (c) pada defleksi badan kendaraan dengan gangguan impuls ... 42
Gambar 5.7 Defleksi rata-rata badan kendaraan akibat gangguan sinusoida ... 43
Gambar 5.8 Defleksi rata-rata per akibat gangguan sinusoida ... 43
Gambar 5.9 Defleksi pada badan kendaraan akibat gangguan random dengan amplituda 0,1 meter .. 44
Gambar 5.10 Amplituda defleksi badan kendaraan akibat gangguan random dengan amplituda 0,03 meter ... 44
Gambar 5.11 Defleksi rata-rata ban untuk gangguan sinusoida ... 45
Gambar 5.12 Percepatan rata-rata badan kendaraan untuk gangguan sinusoida ... 46
Gambar A.1 Amplituda x2 - x4 dengan masukan sinyal random ... 49
Gambar B.1 Program Simulink untuk sistem suspensi pasif ... 51
DAFTAR TABEL
Halaman
Tabel 2.1 Harga Parameter Nominal ... 11
Tabel 2.2 Harga Puncak dan Waktu Mantap untuk Berbagai Parameter ... 14
Tabel 3.1 Kriteria Intuitif untuk GMP ... 23
Tabel 3.2 Kriteria Intuitif untuk GMT ... 24
Tabel 3.3 Contoh Proses Diskritisasi ... 26
Tabel 3.4 Kaidah Atur Kontrol Logika Fuzzy ... 31
Tabel 4.1 Matriks Aturan Kontrol ... 35
BAB I
PENDAHULUAN
1.1 Latar Belakang
Kenyamanan dalam berkendaraan sudah menjadi tuntutan bagi para pengendaranya. Sejalan dengan tuntutan kenyamanan yang semakin tinggi maka penelitian akan kenyamanan kendaraan dewasa ini banyak dilakukan.
Kondisi ideal yang ingin diperoleh dalam kenyamanan adalah kabin kendaraan diam ditempat walaupun ada gangguan yang berupa ketidakrataan jalan. Tetapi kondisi ini tidaklah mungkin dicapai, sehingga pendekatan yang ditempuh adalah meminimumkan efek gangguan yang berupa ketidakrataan jalan dengan memasang sistem suspensi diantara roda dan badan kendaraan.
Sistem suspensi pada kendaraan memegang peranan yang sangat penting dalam memperoleh kenyamanan. Selain dapat mempengaruhi kestabilan kendaraan dan daya lekat ban pada jalan, sistem suspensi berfungsi juga untuk mengurangi getaran pada kabin kendaraan yang disebabkan oleh ketidakrataan permukaan jalan. Umumnya suspensi kendaraan terdiri dari komponen pasif, yaitu komponen pegas dan komponen peredam. Sistem ini sangat dikenal dan cukup efektif untuk meredam getaran dari permukaan jalan. Namun demikian masih terdapat beberapa kendala, antara lain sistem tidak dapat menyesuaikan dengan keadaan jalan yang tidak rata. Untuk mengatasi hal tersebut dibutuhkan sistem peredam getaran dengan menggunakan komponen aktif.
Ada dua jenis sistem yang menggunakan komponen aktif, yaitu sistem suspensi aktif dan sistem suspensi
semi-aktif. Pada sistem suspensi aktif tidak digunakan komponen pasif sedangkan pada sistem suspensi semi-aktif
digunakan komponen pasif selain komponen aktif. Sistem dengan komponen pasif akan mempunyai karakteristik yang tetap untuk berbagai permukaan jalan. Penggunaan komponen aktif dapat merubah karakteristik sistem sesuai dengan permukaan jalan, adanya perubahan massa kendaraan akibat perubahan penumpang maupun bahan bakar.
Keuntungan menggunakan sistem suspensi aktif adalah getaran yang timbul pada badan kendaraan akibat permukaan jalan yang bergelombang atau tidak rata dapat dikurangi dan peredam getaran dapat menyesuaikan dengan kondisi jalan. Kekurangannya adalah sistem suspensi tidak dapat berfungsi apabila sistem pengontrol mengalami kerusakan.
Jenis yang kedua adalah sistem suspensi semi-aktif. Sistem ini masih menggunakan sistem suspensi konvensional dengan menambah peredam yang dapat diatur. Keuntungan sistem ini adalah masih dapat berfungsi pada waktu sistem pengontrol mengalami kegagalan. Namun sistem ini sangat dipengaruhi oleh komponen-komponen pasif yang mempunyai harga karakteristik tertentu.
Bermacam-macam penelitian telah dilakukan, dengan menggunakan berbagai macam model kendaraan, mulai dari model kendaraan seperempat sampai dengan model kendaraan penuh dengan menggunakan berbagai metoda kontrol. Pada penelitian tersebut model yang digunakan adalah linier, sedangkan untuk model yang nonlinier belum dilakukan[1][2][3][4][5].
Pada makalah yang ditulis oleh D’Hrovat[5], dibahas perancangan sistem suspensi aktif dengan menggunakan metoda kontrol optimal pada model kendaraan seperempat yang linier. Dengan menggunakan model yang sama, Purba[3] mengamati karakteristik suspensi aktif dengan menggunakan pendekatan regulator optimal. Demikian juga Edge C. Yeh dan Yon J. Tsao[1] membahas penggunaan fuzzy kontrol untuk suspensi aktif.
Acuan [2] membahas mengenai perancangan sistem suspensi semi-aktif dengan menggunakan strategi kontrol optimal. Model kendaraan yang digunakan adalah model kendaraan setengah.
Pada penelitian ini diajukan suatu perancangan sistem suspensi semi-aktif dengan menggunakan Kontrol Logika Fuzzy, yang akan diterapkan pada model yang nonlinier.
Teori kontrol konvensional memiliki kekurangan dalam aplikasi pada sistem nonlinier dan membutuhkan banyak waktu dalam pengembangannya. Teknologi Intelegensia Buatan lebih mudah dipelajari dibandingkan penyelesaian persamaan matematis kompleks yang digunakan dalam kontrol konvensional. Namun pendekatan ini belum dapat menangani masalah ketidakpastian yang timbul, seperti misalnya gangguan yang tidak diperkirakan sebelumnya. Solusi terbaik untuk masalah ini diperoleh dengan menggunakan variabel linguistik dan inferensi fuzzy yang dikemukakan dalam teori himpunan fuzzy.
Teori himpunan fuzzy pertama kali diperkenalkan oleh Lotfi A. Zadeh pada tahun 1965. Disini dikemukakan secara implisit bahwa penalaran manusia lebih baik daripada mesin sebab manusia mampu mengambil keputusan yang effektif berdasarkan informasi linguistik yang tidak pasti. Sampai akhir tahun 1970-an perkembangan bidang baru ini belum begitu pesat dan sebagian besar masih bersifat teori sebelum munculnya satu aplikasi penting yaitu Kontrol Logika Fuzzy .
Prinsip dasar sebuah Kontrol Logika Fuzzy sebenarnya sangat sederhana yaitu berdasarkan pada suatu model logika yang merepresentasikan proses berfikir seorang operator ketika sedang mengontrol suatu sistem. Dengan demikian telah terjadi suatu pergeseran dari pemodelan sistem yang dikontrol menjadi pemodelan proses berfikir seorang pengontrol.
1.2 Tujuan
Tujuan penelitian ini adalah merancang suatu sistem suspensi semi-aktif dengan menggunakan sistem kontrol berbasis logika fuzzy pada model kendaraan seperempat dengan peredam nonlinier yang dapat mengurangi gangguan yang dirasakan badan kendaraan. Untuk mengetahui unjuk kerja sistem, perancangan tersebut akan diuji dengan melalui studi simulasi menggunakan komputer. Analisis terhadap rancangan akan dilakukan dengan memberikan beberapa masukan (gangguan) pada sistem dengan kondisi yang berbeda misalnya ketidakrataan jalan.
Selanjutnya, akan dilakukan juga perbandingan unjuk kerja antara sistem pengontrol fuzzy yang dirancang dengan sistem suspensi pasif.
1.3 Pembatasan Masalah
Dalam penelitian ini diasumsikan komponen yang nonlinier adalah peredam dengan mengabaikan gaya geseknya, sedang komponen yang lainnya adalah linier, dan semua parameter yang diperlukan dapat diukur. Sensor dan aktuator dapat bekerja secara idial. Sistem dianggap mempunyai satu derajat kebebasan (hanya bergerak ke arah vertikal).
1.4 Metoda Pendekatan
Pada tahap awal akan dilakukan studi tentang suspensi pasif kemudian dimodelkan dan dianalisa dinamika sistemnya. Gambar sistem suspensi pasif dapat dilihat pada Gambar 1.1.
Gambar. 1.1 Suspensi pasif Dimana:
Zs : perpindahan massa Ms (massa kendaraan)
Zu : perpindahan massa Mu (massa ban)
Zr : perpindahan akibat gangguan permukaan jalan
ks, kt : koefisien kekakuan
bs, c : koefisien peredam
Dari analisa suspensi pasif tersebut kemudian ditentukan pengontrol suspensi dengan menggunakan komponen aktif yang dapat dikontrol untuk memperoleh unjuk kerja yang diinginkan.
Tahapan selanjutnya adalah penentuan dan perancangan algoritma Kontrol Logika Fuzzy sehingga dapat diterapkan sebagai pengontrol suspensi semi-aktif yang kemudian diimplementasikan dengan menggunakan program komputer.
Konfigurasi dasar dari Kontrol Logika Fuzzy yang digunakan seperti terlihat pada Gambar 1.2.
Gambar 1.2. Konfigurasi Dasar Kontrol Logika Fuzzy. Ms Zs bs, c ks Mu Zu kt Zr Fuzzifikasi Logika
Pengambilan Keputusan Defuzzifikasi
Sisrtem Yang Dikontrol Basis Pengetahuan
Pada perancangan kontrol berbasis logika fuzzy perlu dilakukan langkah-langkah sebagai berikut: - Fuzzyfikasi
- Menentukan fuzzy rule - Defuzzyfikasi
- Implementasi
Pada tahap akhir dilakukan studi simulasi dari hasil perancangan dengan berbagai kondisi gangguan yang diberikan pada sistem. Unjuk kerja dari sistem yang dirancang dibandingkan dengan unjuk kerja dari sistem suspensi pasif.
BAB II
SISTEM SUSPENSI
Berdasarkan fungsinya, suspensi adalah komponen yang mengisolasi badan kendaraan dari gangguan yang diakibatkan oleh gaya eksitasi jalan. Dengan penggunaan suspensi yang baik diharapkan dapat diperoleh kenyamanan, keandalan mekanik serta masa pakai yang panjang. Untuk itu perlu dirancang suatu sistem suspensi yang mampu memberikan peredaman yang cepat sehingga diperoleh kenyamanan yang diharapkan. Ada beberapa cara yang telah dilakukan oleh para peneliti diantaranya dengan merancang sistem suspensi aktif dan semi-aktif dengan berbagai metoda kontrol.
2.1 Sistem Suspensi Pasif
Suspensi pasif terdiri dari komponen pasif, yaitu pegas dan peredam, dimana tidak ada energi dari luar yang mempengaruhinya. Gambar supensi pasif dengan model kendaraan seperempat dapat dilihat pada gambar 1.1 pada bab I.
2.1.1 Karakteristik Pegas dan Peredam
Persamaan pegas dapat dinyatakan dalam bentuk berikut[8][9]:
F = kx +
µ
x3 2.1 dimana: F = gaya pegas nonlinier, k,µ
= konstanta pegas, x = defleksi pegasDengan k=16.000 N/m dan
µ
=100 N/m3, pegas mempunyai karakteristik seperti terlihat pada gambar 2.1. Pada umumnya defleksi suspensi pada kendaraan kurang dari 10 inchi[12]. Dari Gambar 2.1 dapat dilihat bahwa pada daerah defleksi tersebut pegas masih mempunyai karakteristik yang linier. Oleh karena itu dalam sistem suspensi pegas sering kali bisa dianggap linier.Peredam adalah suatu alat yang dapat menghasilkan gaya reaksi bila diberikan kecepatan kepadanya. Adapun tujuan penggunaan peredam adalah untuk menyerap energi mekanik dan mengeluarkannya dari sistem. Suatu peredam dapat dinyatakan oleh persamaan berikut[10][11] :
F = b
x
. + cx
.x
. 2.2dimana: b, c = koefisien peredam,
x
.
= Kecepatan
Dengan b=980 Ns/m dan c=200 N(s/m)2, karakteristik peredam dapat diperlihatkan pada gambar 2.2. Dari gambar dapat dilihat bahwa peredam merupakan komponen yang nonlinier.
Gambar 2.2 Karakteristik peredam 2.1.2 Persamaan Gerak Sistem Suspensi Pasif
Dengan asumsi pegas dan peredam seperti pada sub bab 2.1.1, dari gambar 1.1 pada bab I diatas dapat diperoleh persamaan gerak dari sistem suspensi sebagai berikut:
M Z
s sk Z
s sZ
ub Z
s sZ
uc Z
sZ
uZ
sZ
u .. . . .(
)
(
)
(
)
+
−
+
−
+
−
−
= 0
2.3M Z
u uk Z
s sZ
ub Z
s sZ
uc Z
sZ
uZ
sZ
uk Z
t rZ
u .. . . .(
)
(
)
(
)
(
)
−
−
−
−
−
−
−
−
−
= 0
2.4Dengan mengambil variabel keadaan :
x
1=
Z
s−
Z
ux
2=
Z
s .x
3=
Z
ux
4=
Z
u . maka diperoleh:x
1x
2x
4 .=
−
x
2k
sM x
s 1b
sM
sx
2x
4c M
sx
2x
4x
2x
4 .(
/
)
(
/
)(
)
( /
)(
)
= −
−
−
−
−
−
x
3x
4 .=
x
4k
sM
ux
1b
sMu x
2x
4c M
ux
2x
4x
2x
4k
tM
uZ
rx
3 .(
/
)
(
/
)(
)
( /
)(
)
(
/
)(
)
=
+
−
+
−
−
+
−
2.5Selanjutnya, persamaan diatas dapat dibentuk menjadi persamaan keadaan berikut:
x
Ax
GZ
r .=
+
2.6x
k
M
b
M
c M
x
x
b
M
c M
x
x
k
M
b
M
c M
x
x
k
M
b
M
c M
x
x
x
s s s s s s s s s u s u u t u s u u .(
/
)
(
/
)
( /
)
(
/
)
( /
)
/
(
/
)
( /
)
/
(
/
)
( /
)
=
−
−
−
−
−
+
−
+
−
−
−
−
−
⎡
⎣
⎢
⎢
⎢
⎢
⎤
⎦
⎥
⎥
⎥
⎥
0
1
0
1
0
0
0
0
1
2 4 2 4 2 4 2 4+
⎡
⎣
⎢
⎢
⎢
⎢
⎤
⎦
⎥
⎥
⎥
⎥
0
0
0
k
M
Z
t u r/
2.7 dimana:A
k
M
b
M
c M
x
x
b
M
c M
x
x
k
M
b
M
c M
x
x
k
M
b
M
c M
x
x
s s s s s s s s s u s u u t u s u u=
−
−
−
−
−
+
−
+
−
−
−
−
−
⎡
⎣
⎢
⎢
⎢
⎢
⎤
⎦
⎥
⎥
⎥
⎥
0
1
0
1
0
0
0
0
1
2 4 2 4 2 4 2 4(
/
)
(
/
)
( /
)
(
/
)
( /
)
/
(
/
)
( /
)
/
(
/
)
( /
)
G
k
tM
u=
⎡
⎣
⎢
⎢
⎢
⎢
⎤
⎦
⎥
⎥
⎥
⎥
0
0
0
/
Dengan menggunakan parameter-parameter Ms=240 Kg, Mu=36 Kg, ks=16.000 N/m, kt=160.000 N/m,
bs=980 Ns/m dan c=200 N(s/m)2, maka dari persamaan 2.6 diperoleh model suspensi pasif sebagai berikut[3][4][12]:
x
x
x
x
x
x
x
x
x
x
.,
(
,
)
( ,
)
( ,
)
( ,
)
,
(
,
)
( ,
)
,
(
,
)
( ,
)
=
−
−
−
−
−
+
−
+
−
−
−
−
−
⎡
⎣
⎢
⎢
⎢
⎢
⎤
⎦
⎥
⎥
⎥
⎥
0
1
0
1
66 6667
4 0833
0 8333
0
4 0833
0 8333
0
0
0
1
444 4444
27 222
5 5556
4444 4444
27 2222
5 5556
2 4 2 4 2 4 2 4
+
⎡
⎣
⎢
⎢
⎢
⎢
⎤
⎦
⎥
⎥
⎥
⎥
0
0
0
4444 4444
,
Z
r 2.82.1.3 Kestabilan Sistem Suspensi Pasif
Tinjau sistem pada persamaan 2.6 dengan mengasumsikan tidak ada gangguan pada sistem, maka diperoleh persamaan berikut:
x
Ax
.
=
2.9 Dari persamaan 2.9, kemudian dipilih suatu kemungkinan fungsi Liapunov berbentukV(x) = xT P x 2.10 dimana P adalah suatu matriks simetri definit positif. Turunan dari V(x) adalah
V x
.( )
= x P x + x P x
T . T . = (Ax)T Px + xT P A x = xT AT P x + xT P A x = xT (AT P + P A) x 2.11 Karena V(x) dipilih definit positif, maka sebagai persyaratan kestabilan asimtotik adalah bahwaV x
.
( )
harus definit negatif. Oleh karena itu , diperlukanV x
.
( )
= -x Qx
T 2.12a dimanaQ = - (AT P + P A) = definit positif 2.12b Dengan demikian, untuk kestabilan asimtotik sistem yang dinyatakan oleh persamaan 2.9, cukup jika Q definit positif.
Dari persamaan 2.8 diketahui bahwa
A
=
−
−
−
−
+
+
−
−
−
⎡
⎣
⎢
⎢
⎢
⎢
⎤
⎦
⎥
⎥
⎥
⎥
0
1
0
1
66 6667
4 0833
0 8333
0
4 0833
0 8333
0
0
0
1
444 4444
27 222
5 5556
4444 4444
27 2222
5 5556
,
(
,
)
( ,
)
( ,
)
( ,
)
,
(
,
)
( ,
)
,
(
,
)
( ,
)
α
α
α
α
denganα
=
x
2−
x
4 .Q
=
⎡
⎣
⎢
⎢
⎢
⎢
⎤
⎦
⎥
⎥
⎥
⎥
1
0
0
0
0 1
0
0
0
0 1
0
0
0
0 1
2.13Dengan menggunakan persamaan 2.12b, yaitu: AT P + P A = -Q
maka diperoleh (untuk
α
= 0
):P
=
−
−
⎡
⎣
⎢
⎢
⎢
⎢
⎤
⎦
⎥
⎥
⎥
⎥
9 9505
0 1076
1 9999
0 0150
0 1076
0 1519
1 0001 0 0014
1 9999
1 0001 86 1997
0 0001
0 0150
0 0014
0 0001
0 0180
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
2.14 Karena determinan P(1x1) = 9,9505 > 0 determinan P(2x2) = 1,5599 > 0 determinan P(3x3) = 123,4469 > 0 determinan P = 2,2212 > 0maka sistem pada persamaan 2.9 adalah stabil asimtotis. Untuk harga P dengan berbagai harga
α
dapat dilihat pada Lampiran A.2.1.4 Perbandingan dengan Model dari Penelitian lainnya
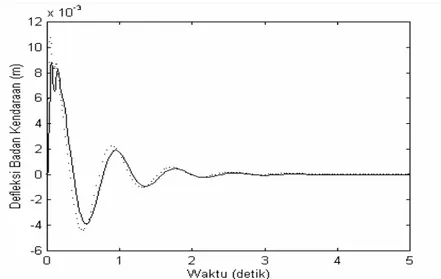
Menggunakan masukan yang sama yaitu sinyal impuls dengan amplituda 0,1 meter, Gambar 2.3 memperlihatkan hasil simulasi dengan model yang digunakan pada penelitian ini dibandingkan dengan model yang digunakan oleh Edge C. Yeh and Yon J. Tsao[1] dan Asli Purba[3]. Dari hasil simulasi dengan SIMULINK model yang digunakan pada penelitian ini memberikan respons yang mirip bila dibanding dengan respons dari model yang digunakan para peneliti tersebut. Perbedaannya adalah respons sistem dengan model yang digunakan pada penelitian ini memberikan harga puncak yang lebih tinggi, hal ini disebabkan pada model yang digunakan pada penelitian ini merupakan model yang nonlinier.
Gambar 2.3 Perbandingan respons sistem (defleksi badan kendaraan (Zs)) dengan model yang digunakan.
_______ = Respons sistem (defleksi badan kendaraan (Zs)) dengan model yang digunakan pada penelitian yang
telah dilakukan
... = Respons sistem (defleksi badan kendaraan (Zs)) dengan model yang digunakan pada penelitian ini.
2.1.5 Unjuk Kerja Sistem Suspensi Pasif
Untuk mensimulasikan sistem digunakan tiga macam permukaan jalan yaitu permukaan jalan dalam bentuk impuls (yang mensimulasikan pada saat kendaraan melewati bentuk permukaan jalan dengan lonjakan tiba-tiba seperti misalnya berupa polisi tidur) , sinusoida dan permukaan jalan dalam bentuk random dengan komponen peredam nonlinier.
Permukaan jalan dalam bentuk sinusoida menggunakan frekuensi 2; 5; 6,2832; 6,4367; 6,6431; 10; 12,5664; 15 dan 25 rad/s dengan lamanya getaran 5 detik[2]. Pada daerah frekuensi tersebut merupakan daerah frekuensi yang paling terasa pada tubuh manusia.
2.1.5.1 Unjuk Kerja Sistem Suspensi Pasif Terhadap Gangguan Impuls
Dalam studi simulsi terhadap sistem dengan gangguan impuls dilakukan pengamatan dengan menggunakan beberapa kondisi kendaraan. Dalam kenyataannya parameter kendaraan dapat berubah karena adanya beberapa faktor antara lain:
• Perubahan koefisien pegas dan koefisien redaman (termasuk perubahan karakteristik nonliniernya) yang disebabkan oleh masa pakai kendaraan yang sudah lama maupun perubahan komponen oleh pemakai.
• Perubahan massa kendaraan yang disebabkan oleh perubahan penumpang, perubahan isi bahan bakar maupun perubahan bentuk badan kendaraan (misalnya penambahan atau pengurangan komponen tertentu).
• Perubahan massa ban/roda sebagai akibat lamanya pemakaian atau digantinya roda kendaraan dengan ukuran yang lebih besar atau lebih kecil dari ukuran standard, yang sesuai dengan keinginan pemakai kendaraan.
Untuk mengetahui unjuk kerja dari sistem suspensi pasif dengan komponen peredam nonlinier yang digunakan terhadap adanya perubahan parameter-parameter tersebut, maka pada penelitian ini diamati pengaruh perubahan parameter dengan cara melakukan variasi yaitu harga masing-masing parameter diambil harga perubahan parameter yang agak ekstrim yaitu setengah kali dan dua kali dari harga parameter nominalnya.
Dari hasil simulasi diamati harga puncak dan waktu mantap pada defleksi badan kendaraan (Zs) untuk
masing-masing perubahan harga parameter. Yang dimaksud dengan harga puncak pada penelitian ini adalah harga amplituda tertinggi yang dihasilkan oleh respons sistem, sedangkan pengertian waktu mantap adalah waktu yang diperlukan oleh respons sistem untuk kembali kepada posisi awal.
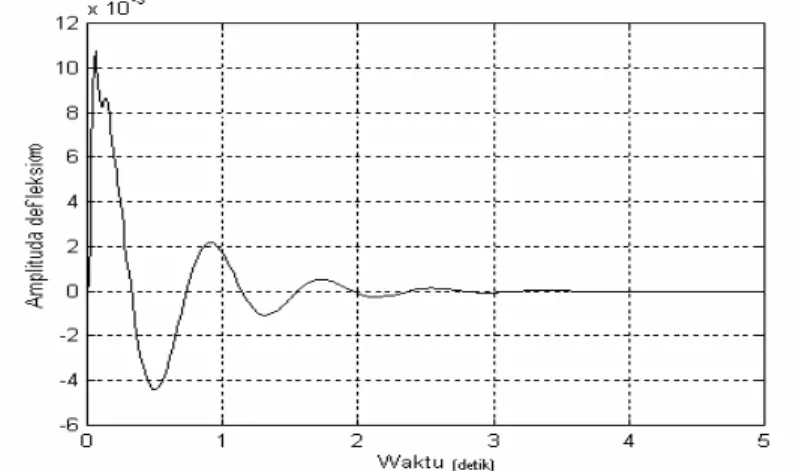
Gambar 2.4 menunjukkan respons yang terjadi pada badan kendaraan saat sistem diberi gangguan impuls sebesar 0,1 meter dengan parameter nominal untuk kendaraan penumpang ringan seperti yang ditunjukan pada Tabel 2.1. Dari hasil simulasi tersebut dapat diketahui respons yang terjadi mempunyai harga puncak 0,0107 meter dan waktu yang diperlukan untuk menuju keadaan mantap adalah 3,0631 detik.
Gambar 2.4 Defleksi pada badan kendaraan (Zs) untuk harga parameter nominal
Tabel 2.1 Harga Parameter Nominal
Parameter Harga
Massa kendaraan (Ms)
Massa ban (Mu)
Koefisien peredam (bs)
Koefisien kekakuan pegas (ks)
Koefisien peredam (c) Koefisien kekakuan ban (kt)
240 Kg 36 Kg 980 Ns/m 16.000 Nm 200 N(s/m)2 160.000 N/m
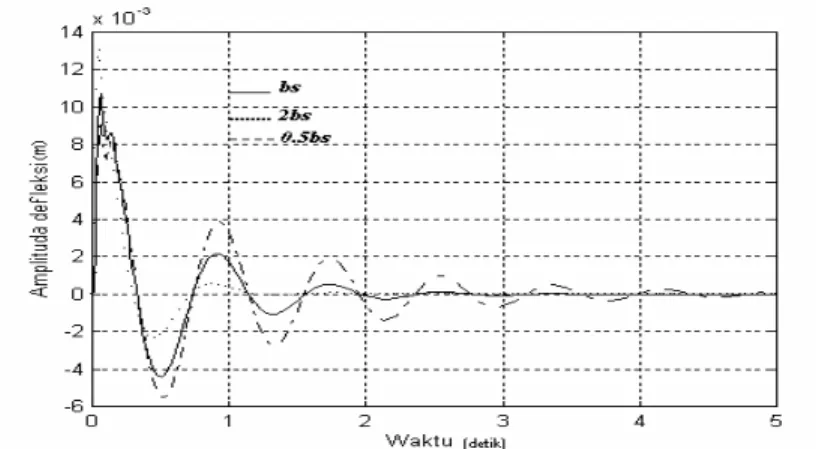
Pada koefisien peredam (harga parameter bs) memberikan harga yang berbeda, sistem memberikan
respons yang berbeda. Unjuk kerja sistem dengan koefisien peredam setengah kali harga koefisien peredam nominal, harga puncak mengalami penurunan menjadi 0,0093 meter tetapi waktu mantap menjadi lebih besar 5 detik. Sedang untuk harga koefisien peredam dua kali harga koefisien peredam nominal menunjukan bahwa harga puncak adalah 0,0130 meter dan waktu mantap menjadi lebih cepat yaitu 1,5 detik. Gambar 2.5 memperlihatkan perbandingan grafik defleksi badan kendaraan (Zs) untuk koefisien peredam nominal, koefisien peredam setengah
Gambar 2.5 Defleksi pada badan kendaraan (Zs) untuk berbagai harga koefisien peredam (bs)
Adanya perubahan koefisien kekakuan pegas (harga parameter ks) akan menyebabkan sistem juga
memberikan respons yang berbeda. Unjuk kerja sistem dengan harga koefisien kekakuan pegas setengah kali harga koefisien kekakuan pegas nominal, harga puncak mengalami penurunan menjadi 0,0098 meter dengan waktu mantap 2,6079 detik. Sedang untuk harga koefisien kekakuan pegas dua kali harga koefisien kekakuan pegas nominal, menunjukan bahwa harga puncak adalah 0,0124 meter dan waktu mantap menjadi lebih cepat yaitu 3,82 detik. Gambar 2.6 memperlihatkan perbandingan grafik defleksi badan kendaraan (Zs) untuk harga koefisien
kekakuan pegas nominal, koefisien kekakuan pegas setengah kali koefisien kekakuan pegas nominal dan harga koefisien kekakuan pegas dua kali koefisien kekakuan pegas nominal.
Gambar 2.6 Defleksi pada badan kendaraan (Zs) untuk berbagai harga koefisien kekakuan pegas (ks)
Pengamatan selanjutnya dilakukan untuk perubahan massa kendaraan (harga parameter Ms). Gambar 2.7
memperlihatkan perbandingan grafik defleksi badan kendaraan (Zs) untuk harga massa kendaraan nominal, harga
massa kendaraan setengah kali harga massa kendaraan nominal dan harga massa kendaraan dua kalinya harga massa kendaraan nominal. Unjuk kerja sistem dengan harga massa kendaraan setengah kali massa kendaraan nominal, harga puncak mengalami penambahan menjadi 0,0187 meter dengan waktu mantap 1,54 detik. Sedang untuk harga massa kendaraan dua kali harga massa kendaraan nominal menunjukan penurunan harga puncak menjadi 0,0064 meter dan waktu mantap menjadi lebih lama yaitu lebih dari 5 detik.
Gambar 2.7 Defleksi pada badan kendaraan (Zs) untuk berbagai harga massa kendaraan (Ms)
Gambar 2.8 memperlihatkan perbandingan grafik defleksi badan kendaraan (Zs) untuk harga massa ban
(harga parameter Mu) nominal, massa ban setengah kali massa ban nominal dan massa ban dua kali massa ban
nominal. Unjuk kerja sistem dengan harga massa ban setengah kali massa ban nominal, harga puncak mengalami penambahan menjadi 0,0117 meter dengan waktu mantap 3,1233 detik. Sedang untuk harga massa ban dua kali harga massa ban nominal menunjukan harga puncak 0,0112 meter dan waktu mantap menjadi 3,07 detik.
Gambar 2.8 Defleksi pada badan kendaraan (Zs) untuk berbagai harga massa ban (Mu)
Gambar 2.9 Defleksi badan kendaraan (Zs) untuk berbagai harga koefisien peredam (c).
Gambar 2.9 memperlihatkan hasil simulasi dengan harga koefisien peredam (c) nominal, setengah kali dan dua kali harga koefisien peredam (c) nominal. Unjuk kerja sistem suspensi pasif dengan harga koefisien peredam setengah kali harga koefisien peredam nominal memberikan harga puncak 0,0098 meter dan waktu
mantap 3,0783 detik, dan untuk harga koefisien peredam dua kali harga koefisien peredam nominal diperoleh waktu mantap sama dengan 3,0032 detik dan harga puncak 0,0122 meter.
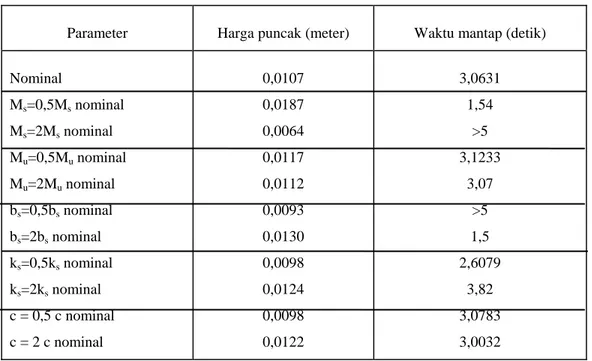
Tabel 2.2 menunjukan harga puncak dan waktu mantap untuk harga-harga parameter yang telah ditunjukkan oleh masing-masing gambar di atas.
Tabel 2.2 Harga Puncak dan Waktu Mantap untuk Berbagai Parameter
Parameter Harga puncak (meter) Waktu mantap (detik) Nominal Ms=0,5Ms nominal Ms=2Ms nominal Mu=0,5Mu nominal Mu=2Mu nominal bs=0,5bs nominal bs=2bs nominal ks=0,5ks nominal ks=2ks nominal c = 0,5 c nominal c = 2 c nominal 0,0107 0,0187 0,0064 0,0117 0,0112 0,0093 0,0130 0,0098 0,0124 0,0098 0,0122 3,0631 1,54 >5 3,1233 3,07 >5 1,5 2,6079 3,82 3,0783 3,0032
Dari hasil simulasi dengan masukan berupa impuls dapat diketahui bahwa yang paling cepat untuk mencapai waktu mantap adalah pada harga koefisien peredam dua kali harga koefisien nominal yaitu 1,5 detik dan harga puncak terendah diperoleh pada harga massa kendaraan dua kali harga massa kendaraan nominal. Harga massa kendaraan (parameter Ms) dipengaruhi oleh ada tidaknya penumpang, sehingga tidak bisa diatur sesuai
dengan kondisi permukaan jalan. Dengan demikian untuk memperoleh peredaman gangguan dengan baik perlu diberikan peredam tambahan yang dapat diatur sesuai dengan kondisi permukaan jalan yang dilalui.
2.1.5.2 Unjuk Kerja Sistem Suspensi Pasif Terhadap Gangguan Sinusoida
Untuk mengetahui unjuk kerja sistem suspensi pasif terhadap gangguan sinusoida, maka sistem diberikan masukan (gangguan) permukaan jalan dengan bentuk sinusoida selama 5 detik dengan berbagai frekuensi.
Gambar 2.10 Defleksi rata-rata badan kendaraan untuk gangguan sinusoida
Gambar 2.10 menunjukkan adanya pengurangan amplituda defleksi badan kendaraan pada frekuensi 12,6 rad/s untuk sistem suspensi pasif. Defleksi tertinggi terjadi pada daerah frekuensi 5 rad/s sampai dengan 10 rad/s.
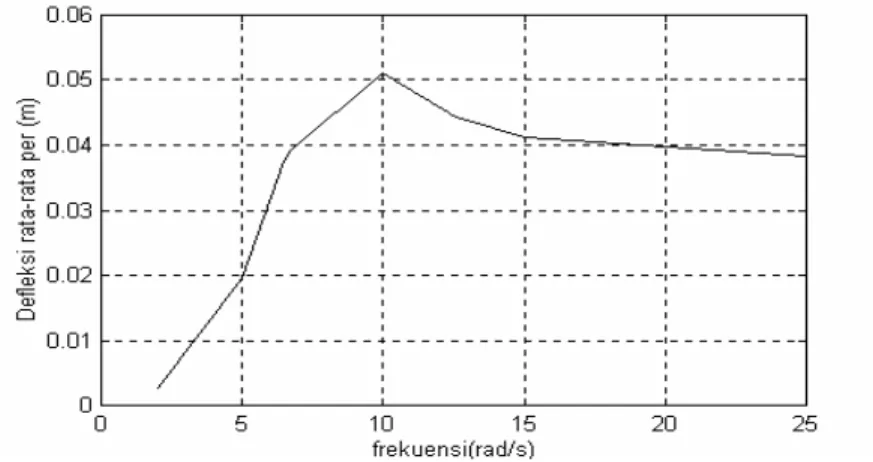
Gambar 2.11 Defleksi rata-rata per untuk gangguan sinusoida
Gambar 2.11 memperlihatkan defleksi per tertinggi terjadi pada frekuensi 10 rad/s kemudian turun secara tajam pada daerah frekuensi 15 rsd/s. Untuk frekuensi tinggi amplituda defleksi semakin berkurang .
2.1.5.3 Unjuk kerja Sistem Suspensi Pasif terhadap Gangguan Random
Untuk mensimulasikan kendaraan yang melewati permukaan jalan yang sebenarnya digunakan sinyal random (bentuk permukaan jalan adalah merupakan bentuk yang random sehingga dapat diwakili dengan mengambil sinyal random) untuk masukan gangguan pada sistem. Gambar 2.12 adalah grafik dari sinyal random yang digunakan sebagai masukan gangguan pada sistem dengan amplituda 0,1 meter. Untuk respons sistem yang terjadi diperlihatkan pada Gambar 2.13. Dari hasil simulasi dapat diketahui untuk masukkan sinyal random dengan amplituda 0,1 meter suspensi pasif mampu meredam amplituda tersebut menjadi sekitar 0,065 meter.
Gambar 2.13 Amplituda defleksi badan kendaraan dengan masukan sinyal random dengan amplituda 0,1 meter
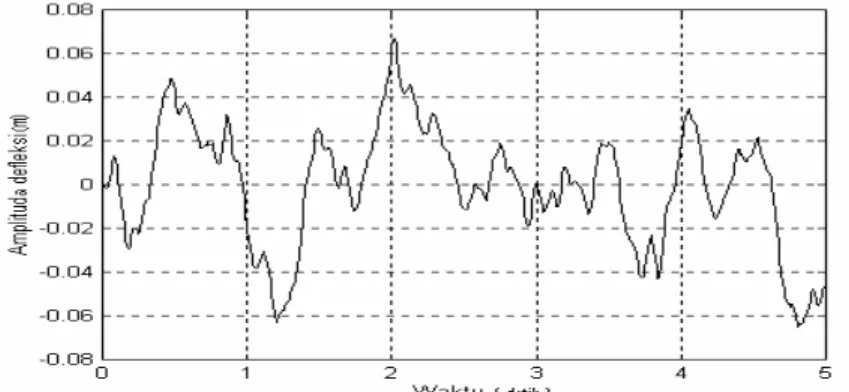
Selanjutnya studi simulasi dilakukan untuk kondisi jalan dengan amplituda lebih kecil yaitu 0,03 meter. Gambar 2.14 dan Gambar 2.15 masing masing memperlihatkan bentuk permukaan jalan yang diwakili oleh sinyal random dengan amplituda 0,03 meter dan respons sistem yang terjadi. Dari hasil simulasi yang diperlihatkan pada Gambar 2.15 dapat diketahui bahwa sistem suspensi pasif mampu meredam amplituda dari 0,03 meter pada permukaan jalan menjadi sekitar 0,016 meter pada badan kendaraan.
Gambar 2.14 Sinyal gangguan random dengan amplituda 0,03 meter.
Gambar 2.15 Amplituda defleksi badan kendaraan dengan masukan sinyal random dengan amplituda 0,03 meter.
2.2 Persamaan Gerak Sistem Suspensi semi-aktif
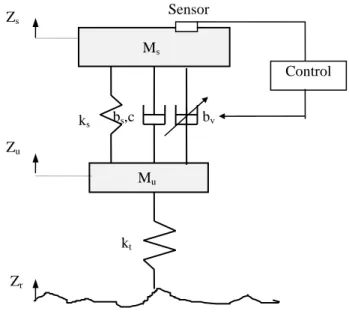
Sistem suspensi semi-aktif merupakan penambahan komponen aktif (berupa peredam variabel) pada sistem suspensi pasif dengan peredam nonlinier seperti yang telah dibahas pada sub bab 2.1. Gambar 2.16 memperlihatkan sistem suspensi semi-aktif
Gambar 2.16 Sistemsuspensi semi-aktif
Pada sistem suspensi semi-aktif hadir komponen aktif bv yang merupakan peredam variabel yang
ditambahkan pada sistem suspensi pasif. Gambar 3.17 memperlihatkan gambar skematis peredam variabel[2]. Harga koefisien peredam dapat dirubah dengan memperbesar atau memperkecil aliran fluid dengan melakukan perubahan pada sumber tegangan.
Gambar 2.17 Gambar skematis peredam variabel Saluran fluid Batang piston Gas Piston Floating piston Fluid Silinder dalam Sumber tegangan V Control Sensor Zs Zu Zr kt ks bs,c bv Ms Mu
Dari gambar 2.16 di atas dapat diperoleh persamaan gerak dari sistem suspensi sebagai berikut:
M Z
s sk Z
s sZ
ub
sb
vZ
sZ
uc Z
sZ
uZ
sZ
u .. . . .(
)
(
)(
)
(
)
+
−
+
+
−
+
−
−
= 0
2.14M Z
u uk Z
s sZ
ub
sb
vZ
sZ
uc Z
sZ
uZ
sZ
uk Z
t rZ
u .. . . .(
)
(
)(
)
(
)
(
)
−
−
−
+
−
−
−
−
−
−
= 0
2.15Dengan menggunakan variabel keadaan seperti pada sistem suspensi pasif yaitu:
x
1=
Z
s−
Z
ux
2=
Z
s .x
3=
Z
ux
4=
Z
u . maka diperoleh:x
1x
2x
4 .=
−
x
k
M x
b
M
x
x
c M
x
x
x
x
b
M
x
x
s s s s s v s 2 1 2 4 2 4 2 4 2 4 .(
/
)
(
/
)(
)
( /
)(
)
(
)
= −
−
−
−
−
−
−
−
x
3x
4 .=
x
k
M x
b
Mu x
x
c M
x
x x
x
k
M
Z
x
b
M
x
x
s u s u t u r v u 4 1 2 4 2 4 2 4 3 2 4 .(
/
)
( /
)(
) ( /
)(
)
(
/
)(
)
(
)
=
+
−
+
−
−
+
−
+
−
2.16 sehingga diperoleh bentuk persamaan keadaan sebagai berikut:x
Ax
B b x
vx
GZ
r .( (
))
=
+
2−
4+
2.17x
k
M
b
M
c M
x
x
b
M
c M
x
x
k
M
b
M
c M
x
x
k
M
b
M
c M
x
x
x
s s s s s s s s s u s u u t u s u u .(
/
)
(
/
)
( /
)
(
/
)
( /
)
/
(
/
)
( /
)
/
(
/
)
( /
)
=
−
−
−
−
−
+
−
+
−
−
−
−
−
⎡
⎣
⎢
⎢
⎢
⎢
⎤
⎦
⎥
⎥
⎥
⎥
0
1
0
1
0
0
0
0
1
2 4 2 4 2 4 2 4+
−
⎡
⎣
⎢
⎢
⎢
⎢
⎤
⎦
⎥
⎥
⎥
⎥
−
+
⎡
⎣
⎢
⎢
⎢
⎢
⎤
⎦
⎥
⎥
⎥
⎥
0
1
0
1
0
0
0
2 4/
/
(
)
/
M
M
b x
x
k
M
Z
s u v t u r 2.18dan dengan menggunakan
β
= − M
s/
M
u danU
b
M
x
x
v s
x
k
M
b
M
c M
x
x
b
M
c M
x
x
k
M
b
M
c M
x
x
k
M
b
M
c M
x
x
x
s s s s s s s s s u s u u t u s u u .(
/
)
(
/
)
( /
)
(
/
)
( /
)
/
(
/
)
( /
)
/
(
/
)
( /
)
=
−
−
−
−
−
+
−
+
−
−
−
−
−
⎡
⎣
⎢
⎢
⎢
⎢
⎤
⎦
⎥
⎥
⎥
⎥
0
1
0
1
0
0
0
0
1
2 4 2 4 2 4 2 4+
−
⎡
⎣
⎢
⎢
⎢
⎢
⎤
⎦
⎥
⎥
⎥
⎥
+
⎡
⎣
⎢
⎢
⎢
⎢
⎤
⎦
⎥
⎥
⎥
⎥
0
1
0
0
0
0
β
U
k
M
Z
t u r/
2.19Dengan demikian diperoleh persamaan keadaan sebagai berikut:
x
Ax
BU
GZ
r .=
+
+
2.20 dimana:A
k
M
b
M
c M
x
x
b
M
c M
x
x
k
M
b
M
c M
x
x
k
M
b
M
c M
x
x
s s s s s s s s s u s u u t u s u u=
−
−
−
−
−
+
−
+
−
−
−
−
−
⎡
⎣
⎢
⎢
⎢
⎢
⎤
⎦
⎥
⎥
⎥
⎥
0
1
0
1
0
0
0
0
1
2 4 2 4 2 4 2 4(
/
)
(
/
)
( /
)
(
/
)
( /
)
/
(
/
)
( /
)
/
(
/
)
( /
)
B
=
−
⎡
⎣
⎢
⎢
⎢
⎢
⎤
⎦
⎥
⎥
⎥
⎥
0
1
0
β
;G
k
tM
u=
⎡
⎣
⎢
⎢
⎢
⎢
⎤
⎦
⎥
⎥
⎥
⎥
0
0
0
/
Dari persamaan 2.19 dan 2.20 terlihat adanya perbedaan dengan sistem suspensi pasif yaitu dengan hadirnya matriks input B. Sementara matriks A dan G adalah sama dengan sistem suspensi pasif.
BAB III
KONTROL LOGIKA FUZZY
Prinsip dasar Kontrol Logika Fuzzy sebenarnya sangat sederhana. Bila pada pengontrol konvensional, sistem yang dikontrol dimodelkan secara analitis oleh sejumlah persamaan diferensial, yang solusinya menentukan aksi kontrol yang harus diberikan pada sistem, maka Kontrol Logika Fuzzy didasarkan pada suatu model logika yang merepresentasikan proses berfikir seorang operator ketika sedang mengontrol suatu sistem. Di sini terjadi suatu pergeseran dari pemodelan sistem yang dikontrol menjadi pemodelan cara berfikir operator.
Kontrol Logika Fuzzy terbukti sukses dalam aplikasinya pada berbagai bidang industri sejak tahun 1980. Contoh aplikasi misalnya pada bidang kontrol robot, kontrol kecepatan maupun transmisi pada automobil, kontrol
elevator, kontrol reaktor nuklir dan sistem tenaga, dan kontrol untuk proses-proses kimia seperti pemurnian air, campuran semen, pertukaran panas dan sebagainya.[6]
3.1 Teori Himpunan Fuzzy
Teori himpunan fuzzy pertama kali diperkenalkan oleh Lotfi A Zadeh pada tahun 1965. Teori himpunan fuzzy ini didasari oleh logika fuzzy yang merupakan perluasan dari logika boolean. Pada logika boolean terdapat tingkat logika 1 dan 0 yang menyatakan benar dan salah, sedang pada logika fuzzy terdapat tingkat logika antara 0 dan 1 yang menyatakan tingkat kebenaran.
Misalkan U adalah kumpulan obyek yang secara umum dinyatakan dengan {u}, yang bisa berharga diskrit atau kontinu. U disebut semesta pembicaraan (universe of discourse), dan u mewakili elemen-elemen U.
Suatu himpunan fuzzy F dalam semesta pembicaraan U dapat direpresentasikan oleh suatu fungsi keanggotaan (membership function)
µ
F yang mewakili nilai dalam interval [0,1] untuk tiap u dalam U dan dinyatakan sebagai:
µ
F=U→[0,1] 3.1yang dapat digambarkan dalam bentuk seperti terlihat pada gambar 3.1
Gambar 3.1 Himpunan fuzzy dan fungsi keanggotaannya
Himpunan fuzzy F dalam himpunan semesta U dapat direpresentasikan sebagai pasangan antara elemen u dan tingkat fungsi keanggotaannya, atau
F = {(u,
µ
F(u)) / u∈
U} 3.2 Semua elemen u dalam U yang memberikan nilaiµ
F( )
u
> 0 disebut penyokong (support) dari himpunan Fuzzy yang bersangkutan. Dalam hal dimanaµ
F( )
u
= 0,5 maka u disebut sebagai titik silang dan himpunan fuzzy dimana penyokongnya bernilai 1,0 disebut sebagai fuzzy tunggal (singleton).Jika F adalah suatu fuzzy tunggal yang menyokong u, maka ditulis:
F =
µ
F( )
u
/u 3.3dimana
µ
F( )
u
adalah tingkat keanggotaan u di dalam himpunan F. Selanjutnya, himpunan fuzzy dapat dinyatakan dalam bentuk:F =
[
µ
F( ) /
i i i nu
u
=∑
1 ] jika U diskrit 3.5 3.1.1 Fungsi Keanggotaan[6]Dalam mendefinisikan fungsi keanggotaan (membership function) dapat dilakukan dengan dua cara yaitu dengan numerik dan dengan fungsional. Definisi numerik menyatakan fungsi keanggotaan himpunan fuzzy dalam sebuah vektor dimana dimensinya tergantung pada tingkat diskritisasi. Definisi fungsional mendefinisikan fungsi keanggotaan himpunan fuzzy dalam pernyataan analitik dimana tingkat keanggotaan masing-masing elemen dihitung didalam semesta pembicaraan. Fungsi keanggotaan yang sering dipakai dalam praktek diantaranya:
a. Fungsi -S yang didefinisikan sebagai berikut:
S(u; a, b, c) =
0
2
1 2
1
2 2untuk
untuk a
u
b
untuk
untuk
u
a
u
a
c
a
u
c
c
a
b
u
c
u
c
<
−
−
≤ ≤
−
−
−
≤ ≤
>
⎧
⎨
⎪⎪
⎩
⎪
⎪
[(
) / (
)]
[(
) / (
)]
3.6 Gambar 3.2 Fungsi - Sb. Fungsi -
π
yang didefinisikan sebagai berikut:π
(u; b, c) =S u; c - b, c - b / 2, c)
untuk u
c
S(u; c, c + b / 2, c + b)
untuk u
c
(
≤
−
≥
⎧
⎨
⎩1
3.7 Gambar 3.3 Fungsi -π
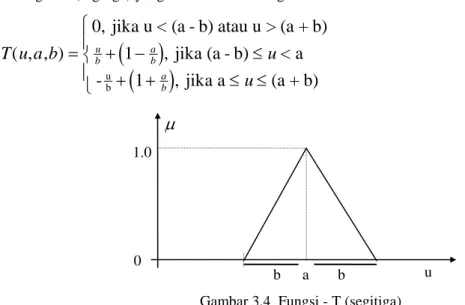
c-b/2 c+b/2 b 0.5c. Fungsi -T (segitiga) yang didefinisikan sebagai berikut:
(
)
(
)
T u a b
u
u
u b a b a b( , , )
,
,
=
+ −
≤
+ +
≤ ≤
⎧
⎨
⎪
⎩
⎪
0, jika u < (a - b) atau u > (a + b)
jika (a - b)
< a
-
ujika a
(a + b)
b1
1
3.8Gambar 3.4 Fungsi - T (segitiga)
3.2 Operasi Himpunan Fuzzy [6][7]
Misalkan A dan B adalah dua himpunan fuzzy dalam himpunan semesta U dengan fungsi keanggotaan masing-masing
µ
A danµ
B. Operasi-operasi teori himpunan seperti komplemen, gabungan dan irisan untukhimpunan fuzzy didefinisikan sebagai berikut: 1. Komplemen dari A (A’)
µ
A'( )
u
= 1 -µ
A( )
u
3.9 2. Irisan dari A dan B (A∩B)µ
A B∩( )
u
= min(µ
A( )
u
,µ
B( )
u
) 3.103. Gabungan dari A dan B (A∪B)
µ
A B∪( )
u
= max(µ
A( )
u
,µ
B( )
u
) 3.11Relasi fuzzy adalah suatu relasi yang nilai kebenarannya diantara 0 dan 1. Relasi fuzzy dari himpunan semesta
A
1,...,
A
n didefinisikan sebagai berikut:R =
∫
A1× ×... Anµ
R( ,...,
u
1u
n) / ( ,...,
u
1u
n)
3.12dengan
µ
menyatakan tingkat kebenaran relasi R.Jika R dan S adalah relasi fuzzy dalam UxV dan VxW, komposisi R dan S adalah suatu relasi fuzzy yang dinotasikan dengan R o S dan didefinisikan:
R o S =
∫
u v×sup(
µ
R u v( , )∗
µ
S v w( , )) / ( , )
u w
3.13 3.3 Logika Fuzzyµ
1.0 0 b a b uDalam logika fuzzy ada dua kaidah atur kesimpulan fuzzy yang penting, yaitu GMP (Generalized Modus Ponens) dan GMT (Generalized Modus Tollens), yang dapat didefinisikan sebagai berikut:[7]
GMP:
premis 1 :
x
adalah A’premis 2 : jika
x
adalah A makay
adalah B konsekuens :y
adalah B’jika terdapat B = A o R maka berlaku B’ = A’ o R 3.14
Dimana A, A’, B dan B’ adalah himpunan fuzzy sedang
x
dany
variabel linguistik. Pada Tabel 3.1 bisa kita lihat kriteria yang berhubungan dengan premis 1 dan konsekuensinya pada GMP.Tabel 3.1 Kriteria intuitif untuk GMP
Kriteria Premis 1 Konsekuensi
Kriteria 1 Kriteria 2-1 Kriteria 2-2 Kriteria 3-1 Kriteria 3-2 Kriteria 4-1 Kriteria 4-2 x is A x is very A x is very A x is more or less A x is more or less A x is not A x is not A y is B y is very B y is B y is more or less B y is B y is unknown y is not B GMT: premis 1 :
y
adalah B’premis 2 : jika
x
adalah A makay
adalah B konsekuens :x
adalah A’jika terdapat B = A o R maka berlaku A’ = R o B’ 3.15 Kriteria intuitif untuk GMT dapat dilihat pada Tabel 3.2 berikut.
Tabel 3.2 Kriteria intuitif untuk GMT
Kriteria Premis 1 Konsekuensi
Kriteria 5 Kriteria 6 Kriteria 7 Kriteria 8-1 Kriteria 8-2 y is not B y is not very B y is not more or less B y is B
y is B
x is not A x is not very A x is not more or less A x is unknown
3.4 Konfigurasi Dasar Kontrol Logika Fuzzy
Gambar 1.2 pada bab I memperlihatkan konfigurasi dasar suatu Kontrol Logika Fuzzy yang menunjukkan empat komponen utama, yaitu masing-masing:
1. Fuzzifikasi
Fuzzifikasi bertujuan untuk mentransformasikan masukan nyata yang bersifat bukan fuzzy ke himpunan fuzzy. 2. Basis pengetahuan
Basis pengetahuan terdiri dari basis data dan basis kaidah atur. Basis data mendefinisikan himpunan fuzzy atas ruang-ruang masukan dan keluaran. Basis kaidah atur berisi kaidah-kaidah kontrol.
3. Logika pengambilan keputusan
Logika pengambilan keputusan adalah cara pengambilan keputusan dengan menggunakan implikasi fuzzy dan mekanisme penarikan kesimpulan.
4. Defuzzifikasi
Defuzzifikasi adalah proses pengubahan himpunan fuzzy ke sinyal yang bersifat bukan fuzzy.
3.4.1 Strategi Fuzzifikasi
Fuzzifikasi berhubungan dengan ketidakpastian dan ketakpresisian dalam bahasa natural. Fuzzifikasi merupakan transformasi dari data nyata (crips) yang diperoleh dari pengukuran menjadi himpunan fuzzy dengan manipulasi data dalam logika pengambilan keputusan berbasis pada teori himpunan fuzzy. Tahap ini berhubungan dengan ketidakjelasan dan ketidaktelitian dalam bahasa natural dan merupakan peranan yang penting pada kasus dimana informasi yang tersedia mengandung ketidakpastian.
Secara simbolis fuzzifikasi dapat ditulis sebagai berikut:
x
= fuzzifier (
x
o)
3.16
dimana
x
o adalah masukan nyata (crips) yang berasal dari sistem fisis,x
adalah himpunan fuzzy, dan fuzzifier menyatakan operasi fuzzifikasi.Pada dasarnya fuzzifikasi memiliki fungsi sebagai berikut: 1. Mengukur nilai variabel masukan.
2. Melakukan pemetaan berskala yang merubah jangkauan dari nilai variabel masukan kedalam semesta pembicaraan yang bersangkutan
3. Merumuskan fungsi fuzzifikasi yang merubah data masukan ke dalam nilai linguistik yang sesuai, yang akan digunakan sebagai label dari himpunan fuzzy.
Hubungan antara variabel, label dan tingkat keanggotaan dalam himpunan fuzzy dengan
fungsi keanggotaan segitiga (fungsi - T) dapat dilihat pada Gambar 3.5. Variabel yang digunakan
sebagai contoh adalah besar perubahan dalam suatu pengukuran data dimana terdapat besaran
yang ‘negatif besar’ sampai dengan ‘positif besar’.
NB NK ZE
1 PK PB
10 -10 0
Gambar 3.5 Hubungan antara variabel, label dan tingkat keanggotaan dalam himpunan fuzzy
dimana:
Label NB = Negatif Besar ZE = Nol PB = Positif Besar NK = Negatif Kecil PK = Positif Kecil
Variabel antara -10 sampai dengan 10 adalah besarnya perubahan yang terjadi dalam suatu pengukuran data.
3.4.2 Basis Pengetahuan
Basis pengetahuan merupakan bagian dari konfigurasi Kontrol Logika Fuzzy yang memuat pengetahuan dari persoalan yang akan diselesaikan dengan Kontrol Logika Fuzzy. Pengetahuan yang dimuat terdiri dari basis data dan basis kaidah atur fuzzy. Informasi yang ada ini akan digunakan sebagai dasar dalam komponen konfigurasi yang lain.
Langkah awal yang dilakukan adalah mendefinisikan informasi apa saja yang ada dalam sistem yang ditinjau. Setelah diketahui data masukan dan keluaran sistem, maka dirumuskan perubahan mendasar yang dilakukan terhadap data tersebut. Kemudian didefinisikan karakteristik operasi khusus pada model fuzzy yang diusulkan sambil ditentukan kapan dan dimana sub sistem fuzzy ini akan dipakai dalam keseluruhan sistem. Setelah didapat gambaran umum dari sistem yang diinginkan maka disusun basis data dan basis kaidah atur fuzzy.
3.4.2.1 Basis Data
Basis data berfungsi untuk mendefinisikan himpunan fuzzy dari masukan dan keluaran agar dapat dipakai oleh kaidah atur fuzzy. Perancangan basis data mempertimbangan aspek berikut ini:
1. Diskritisasi semesta pembicaraan
Untuk merepresentasikan informasi yang mengandung ketidakpastian, maka diperlukan kuantisasi informasi sehingga informasi ini dapat diolah dalam komputer digital. Tiap segmen kuantisasi akan merupakan penyokong himpunan fuzzy. Sebagai contoh diskritisasi dapat dilihat pada Tabel 3.3, dimana semesta pembicaraan didiskritisasi menjadi lima tingkat himpunan fuzzy (NB, NS, ZE, PS, PB).
Tabel 3.3 Contoh Proses Diskritisasi
Range NB NS ZE PS PB xo-12 -12≤xo≤-8 -8≤xo≤-4 -4≤xo≤+4 +4≤xo≤+8 +8≤xo≤+12 1,0 0,3 0,0 0,0 0,0 0,0 0,3 1,0 0,7 0,3 0,0 0,0 0,0 0,3 0,7 1,0 0,7 0,3 0,0 0,0 0,0 0,3 0,7 1,0 0,0 0,0 0,0 0,0 0,0 0,3