BAB II
TINJAUAN PUSTAKA
Di babini, akan dijelaskan komponen-komponenutama yang digunakandan
pembahasan tentang pengukuran ketinggian air digital dengan berbasis Arduino
uno dengan menggunakan sensor UltrasonikHC-SR04.
2.1 Ultrasonik HC-SR04
HC-SR04 adalah sebuah modul yang berfungsi untuk melakukan
pengukuran jarak suatu benda/ halangan dengan memanfaatkan sinyal suara
ultrasonic.Performa yang stabil dan akurasi yang tinggi dengan harga yang murah
merupakan kelebihan dari HC-SR04.Karena kelebihannya, HC-SR04 banyak
dipakai dalam berbagai aplikasi pengukuran jarak.
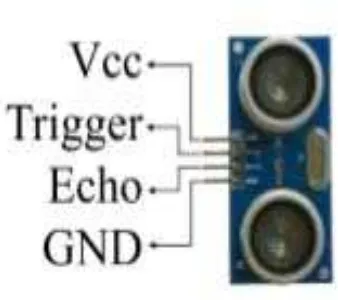
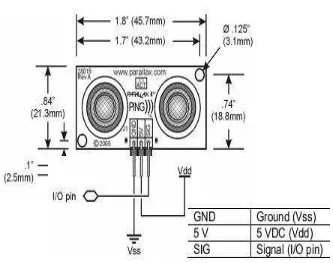
Gambar 2.1Konfigurasi pin dan tampilan sensor ultrasonik HC-SR04
HC-SR04 memiliki 2 komponen utama sebagai penyusunnya yaitu
ultrasonic transmitter dan ultrasonic receiver. Fungsi dari ultrasonic transmitter
ultrasonic receiver menangkap hasil pantulan gelombang ultrasonik yang
mengenai suatu objek. Waktu tempuh gelombang ultrasonik dari pemancar hingga
sampai ke penerima sebanding dengan 2 kali jarak antara sensor dan bidang
pantul
Pada umumnya, sensor ultrasonic ini berbentuk papan elektronik
berukuran kecil yang dilengkapi dengan beberapa rangkaian elektronik dan dua
buah transducer.Transducer yang pertama berfungsi sebagai transmitter
gelombang ultrasonic dan transducer yang satunya berfungsi sebagai
receiver.Pada beberapa produk kadang hanya ditemukan satu buah transducer
yang bertindak sebagai transmitter sekaligus receiver sekaligus.Sensor ini
menawarkan deteksi jarak tanpa sentuhan langsung dengan akurasi yang tinggi
dan stabil.
Sensor ini bekerja dengan cara menghasilkan gelombang suara pada
frekuensi tinggi yang kemudian akan segera dipancarkan oleh tranducer yang
bertindak sebagai transmitter. Pantulan gelombang yang mengenai benda di
depannya akan di tangkap oleh transducer yang bertidak sebagai receiver. Dengan
mengetahui lamanya waktu antara dipancarkannya gelombang ultrasonic sampai
dengan ditangkap kembali oleh receiver, maka akan diketahui jarak dari benda
yang terdapat di depan sensor tersebut.
Kecepatan suara adalah 340m/detik, lamanya waktu tempuh gelombang
ultrasonic dikalikan kecepatan suara, kemudian dibagi dua akan menghasilkan
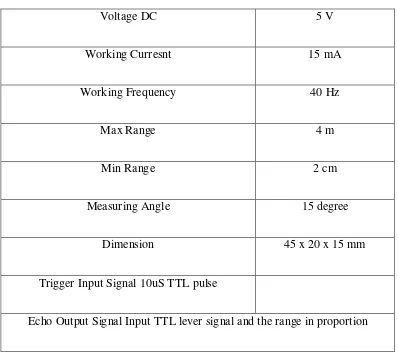
Data Sheet Ultrasonik HC SR04
Tabel 2.1 Data Sheet Ultrasonik HC SR04
Berikut adalah pin dari HC-SR04 :
1. VCC : Input supply 5V
2. Trig : Input untuk memberikan pulsa trigger
3. Echo : Output untuk pulsa Echo
4. GND : Input supply Ground
Konsep yang digunakan oleh sensor ultrasonik HC-SR04 adalah sebagai berikut:
Voltage DC 5 V
Working Curresnt 15 mA
Working Frequency 40 Hz
Max Range 4 m
Min Range 2 cm
Measuring Angle 15 degree
Dimension 45 x 20 x 15 mm
Trigger Input Signal 10uS TTL pulse
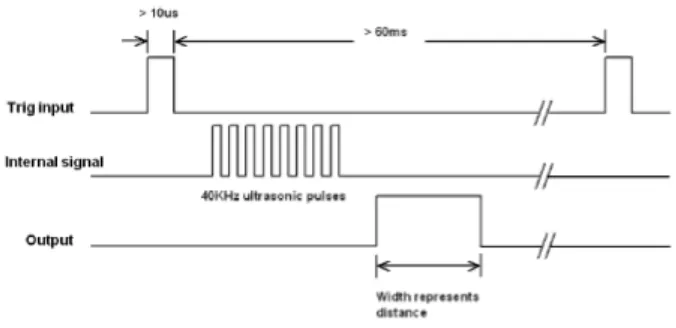
• Sensor akan mengirim 8 sinyal (ping) pada frekuensi 40 kHz jika pin
triggerpada sensor berada pada kondisi HIGH selama kurang lebih 10
mikrodetik (10 microseconds).
• Sensor kemudian akan mendeteksi apakah sinyal yang dikirimkan tersebut
dipantulkan oleh target yang berada di depan sensor dan diteruskan ke pin
echo.
• Ketika sinyal tersebut diterima, maka jarak antara sensor dan benda
tersebut dapat diperoleh dengan menghitung jeda waktu antara sinyal
trigger dikirim oleh sensor dan kemudian diterima kembali oleh sensor.
Rumusnya kurang lebih seperti ini: jeda_waktu (microseconds) / 58 untuk
memperoleh jarak dalam satuan sentimeter dan jeda_waktu
(microseconds) / 148 untuk memperoleh jarak dalam satuan inchi.
• Perlu diingat bahwa sebaiknya menggunakan jeda minimal selama 60
milidetik sebelum mengirim ulang sinyal HIGH pada triggerpin dan
memberikan sinyal LOW pada trigger pin selama kurang lebih 2
mikrodetik sebelum mengirim sinyal HIGH pada trigger pin.
2.2. Sensor Ultrasonik
Sensor ultrasonik adalah sensor yang bekerja berdasarkan prinsip pantulan
gelombang suara dan digunakan untuk mendeteksi keberadaan suatu objek
tertentu di depannya, frekuensi kerjanya pada daerah di atas gelombang suara dari
40 KHz hingga 400 KHz. Sensor ultrasonik terdiri dari dari dua unit, yaitu unit
pemancar dan unit penerima. Struktur unit pemancar dan penerima sangatlah
sederhana, sebuah kristal piezoelectric dihubungkan dengan mekanik jangkar dan
memiliki frekuensi kerja 40 KHz – 400 KHz diberikan pada plat logam. Struktur
atom dari kristal piezoelectric akan berkontraksi (mengikat), mengembang atau
menyusut terhadap polaritas tegangan yang diberikan dan ini disebut dengan efek
piezoelectric.
Kontraksi yang terjadi diteruskan ke diafragma penggetar sehingga terjadi
gelombang ultrasonik yang dipancarkan ke udara (tempat sekitarnya).
Pantulangelombang ultrasonik akan terjadi bila ada objek tertentu dan pantulan
gelombang ultrasonik akan diterima kembali oleh unit sensor penerima.
Selanjutnya unit sensor penerima akan menyebabkan diafragma penggetar akan
bergetar dan efek piezoelectric menghasilkan sebuah tegangan bolak-balik dengan
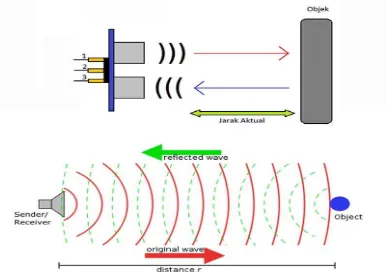
frekuensi yang sama. Untuk lebih jelas tentang prinsip kerja dari sensor ultrasonik
dapat dilihat prinsip dari sensor ultrasonic pada gambar berikut :
Besar amplitudo sinyal elekrik yang dihasilkan unit sensor penerima
tergantung dari jauh dekatnya objek yang dideteksi serta kualitas dari sensor
pemancar dan sensor penerima. Proses sensoring yang dilakukan pada sensor ini
menggunakan metode pantulan untuk menghitung jarak antara sensor dengan
obyek sasaran. Jarak antara sensor tersebut dihitung dengan cara mengalikan
setengah waktu yang digunakan oleh sinyal ultrasonik dalam perjalanannya dari
rangkaian pengirim sampai diterima oleh rangkaian penerima, dengan kecepatan
rambat dari sinyal ultrasonik tersebut pada media rambat yang digunakannya,
yaitu udara.
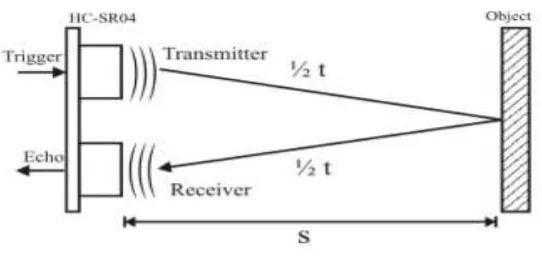
Gambar 2.3 Prinsip kerja HC-SR04
Prinsip pengukuran jarak menggunakan sensor ultrasonik HC-SR04 adalah,
ketikapulsa trigger diberikan pada sensor, transmitter akan mulai memancarkan
gelombangultrasonik, pada saat yang sama sensor akan menghasilkan output TTL
transisi naikmenandakan sensor mulai menghitung waktu pengukuran, setelah
receiver menerima pantulan yang dihasilkan oleh suatu objek maka pengukuran
waktu akan dihentikan dengan menghasilkan output TTL transisi turun.
• Sinyal dipancarkan oleh pemancar ultrasonik dengan frekuensi tertentu
dan dengan durasi waktu tertentu. Sinyal tersebut berfrekuensi diatas
20kHz. Untuk mengukur jarak benda (sensor jarak), frekue nsi yang umum
digunakan adalah 40kHz.
• Sinyal yang dipancarkan akan merambat sebagai gelombang bunyi dengan
kecepatan sekitar 340 m/s. Ketika menumbuk suatu benda, maka sinyal
tersebut akan dipantulkan oleh benda tersebut.
• Setelah gelombang pantulan sampai di alat penerima, maka sinyal tersebut
akan diproses untuk menghitung jarak benda tersebut. Jarak benda
dihitung berdasarkan rumus :
S = 340.t/2 ...(2.1)
dimana S merupakan jarak antara sensor ultrasonik dengan benda (bidang pantul),
dan t adalah selisih antara waktu pemancaran gelombang oleh transmitter dan
waktu ketika gelombang pantul diterima receiver. Pemilihan HC-SR04 sebagai
sensor jarak yang akan digunakan pada penelitian ini karena memiliki fitur
sebagai berikut; kinerja yang stabil, pengukuran jarak yang akurat dengan
ketelitian 0,3 cm, pengukuran maksimum dapat mencapai 4 meter dengan jarak
minimum 2 cm, ukuran yang ringkas dan dapat beroperasi pada level tegangan
TTL Prinsip pengoperasian sensor ultrasonik HC-SR04 adalah sebagai berikut ;
awali dengan memberikan pulsa Low (0) ketika modul mulai dioperasikan,
kemudian berikan pulsa High (1) pada trigger selama 10 μs sehingga modul mulai
memancarkan 8 gelombang kotak dengan frekuensi 40 KHz, tunggu hingga
terjadi, setelah itu gunakan Persamaan 2.1 untuk mengukur jarak antara sensor
dengan objek. Timing diagram pengoperasian sensor ultrasonik HC-SR04
diperlihatkan pada Gambar 2.3
Gambar 2.4 Timing diagram pengoperasian sensor ultrasonik HC-SR04
•Aplikasi Sensor Ultrasonik
Dalam bidang kesehatan, gelombang ultrasonik bisa digunakan untuk
melihat organ-organ dalam tubuh manusia seperti untuk mendeteksi tumor, liver,
otak dan menghancurkan batu ginjal. Gelombang ultrasonik juga dimanfaatkan
pada alat USG (ultrasonografi) yang biasa digunakan oleh dokter
kandungan.Dalam bidang industri, gelombang ultrasonik digunakan untuk
mendeteksi keretakan pada logam, meratakan campuran besi dan timah,
meratakan campuran susu agar homogen, mensterilkan makanan yang diawetkan
dalam kaleng, dan membersihkan benda benda yang sangat halus. Gelombang
ultrasonik juga bisa digunakan untuk mendeteksi keberadaan mineral maupun
minyak bumi yang tersimpan di dalam perut bumi.Dalam bidang pertahanan,
dalam air. Gelombang ultrasonik digunakan oleh kapal pemburu untuk
mengetahui keberadaan kapal selam, dipasang pada kapal selam untuk
mengetahui keberadaan kapal yang berada di atas permukaan air, mengukur
kedalaman palung laut, mendeteksi ranjau, dan menentukan puosisi sekelompok
ikan.
• Rangkaian Sensor Ultrasonik
1. Piezoelektrik
Piezoelektrik berfungsi untuk mengubah energi listrik menjadi energi
mekanik. Bahan piezoelektrik adalah material yang memproduksi medan listrik
ketika dikenai regangan atau tekanan mekanis. Sebaliknya, jika medan listrik
diterapkan, maka material tersebut akan mengalami regangan atau tekanan
mekanis. Jika rangkaian pengukur beroperasi pada mode pulsa elemen
piezoelektrik yang sama, maka dapat digunakan sebagai transmitter dan reiceiver.
Frekuensi yang ditimbulkan tergantung pada osilatornya yang disesuiakan
frekuensi kerja dari masing-masing transduser. Karena kelebihannya inilah maka
tranduser piezoelektrik lebih sesuai digunakan untuk sensor ultrasonik.
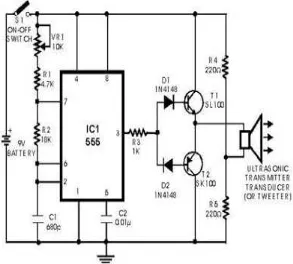
2. Transmitter
Transmitter adalah sebuah alat yang berfungsi sebagai pemancar
gelombang ultrasonik dengan frekuensi tertentu (misal, sebesar 40 kHz) yang
dibangkitkan dari sebuah osilator. Untuk menghasilkan frekuensi 40 KHz, harus
di buat sebuah rangkaian osilator dan keluaran dari osilator dilanjutkan menuju
penguat sinyal. Besarnya frekuensi ditentukan oleh komponen RLC / kristal
tergantung dari disain osilator yang digunakan. Penguat sinyal akan memberikan
sehingga bergetar dan memancarkan gelombang yang sesuai dengan besar
frekuensi pada osilator.
Gambar 2.5 rangkaian dasar dari transmitter ultrasonik
3. Receiver
Receiver terdiri dari transduser ultrasonik menggunakan bahan
piezoelektrik, yang berfungsi sebagai penerima gelombang pantulan yang berasal
dari transmitter yang dikenakan pada permukaan suatu benda atau gelombang
langsung LOS (Line of Sight) dari transmitter. Oleh karena bahan piezoelektrik
memiliki reaksi yang reversible, elemen keramik akan membangkitkan tegangan
listrik pada saat gelombang datang dengan frekuensi yang resonan dan akan
Gambar 2.6 rangkaian dasar receiver sensor ultrasonik
Gambar 2.7 sensor ultrasonik HC-SR04
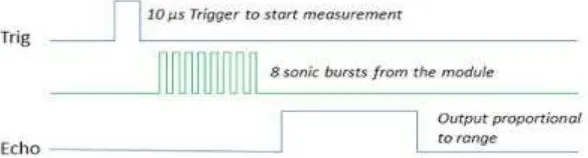
Cara menggunakan alat ini yaitu: ketika kita memberikan tegangan positif pada
pin Trigger selama 10uS, maka sensor akan mengirimkan 8 step sinyal ultrasonik
dengan frekuensi 40kHz. Selanjutnya, sinyal akan diterima pada pin Echo. Untuk
mengukur jarak benda yang memantulkan sinyal tersebut, maka selisih waktu
ketika mengirim dan menerima sinyal digunakan untuk menentukan jarak benda
Berikut adalah visualisasi dari sinyal yang dikirimkan oleh sensor HC-SR04
Gambar 2.8 sistem pewaktu pada sensor HC-SR04
Terdapat 2 jenis sensor ultraonik yang beredar di pasaran yaitu :
1. Sensor ultrasonik ping ( parallax )
2.Sensor ultrsonik defantech ( SRF 04 ranger )
2.3 Sensor Jarak Ultrasonik Ping
Sensor jarak ultrasonik ping adalah sensor 40 khz produksi parallax yang
banyak digunakan untuk aplikasi atau kontes robot cerdas. Kelebihan sensor ini
adalah hanya membutuhkan 1 sinyal ( SIG ) selain jalur 5 v dan ground.
Sensor PING mendeteksi jarak objek dengan cara memancarkan gelombang
ultrasonik ( 40 KHz ) selama t = 200 us kemudian mendeteksi pantulannya.
Sensor PING memancarkan gelombang ultrasonik sesuai dengan kontrol dari
mikrokontroller pengendali ( pulsa trigger dengan tout min 2 us ).
Spesifikasi sensor ultrasonik PING:
2. Input trigger – positive TTL pulse, 2 us min, 5 us tipikal
3. Echo hold off 750 us dari of trigger pulse
4. Delay before next measurement 200 us
5. Brust indikator LED menampilkan aktivitas sensor
Gelombang ini melalui udara dengan kecepatan 344 m/s kemudian
mengenai obyek dan memantul kembali ke sensor. Ping mengeluarkan pulsa
output high pada pin SIG setelah memancarkan gelombang ultrasonik dan setelah
gelombang pantulan terdeteksi Ping akan membuat output low pada pin SIG.
Lebar pulsa High (tIN) akan sesuai dengan lama waktu tempuh gelombang
ultrasonik untuk 2x jarak ukur dengan obyek. Maka jarak yang diukur ialah [(tIN
s x 344 m/s) : 2] meter.
Sistem minimal mikrokontroller ATMega 8535 dan software basic stamp
Editor diperlukan untuk memprogram mikrokontroller dan mencoba sensor ini.
Keluaran dari pin SIG ini yang dihubungkan ke salah satu port di kit
mikrokontroller. Berikut contoh aplikasi sensor PING pada mikrokontroler BS2,
dimana pin SIG terhubung ke pa pin7, dan memberikan catu daya 5V dan
ground.fungsiSIGOUT untukmentrigger ping, sedangkan fungsi SIGIN
digunakan untuk mengukur pulsa yang sesuai dengan jarak dari objek target.
Instalasi Sensor Ultrasonic Ping
Sensor ultrasonic ping akan bekerja jika mendapat suplay tegangan sebesar
5 V DC. dimana tegangan 5 V DC dihubungkan dengan konektor Vcc dan ground
mikrokontroler.Konektor SIG adalah sebagai control sensor ini dalam
pendeteksian objek sekaligus pembacaan jarak objek dengan sensor ini. progamer
dapat mensetting sensor ini dengan jarak yang telah ditentukan sesuai dengan ring
deteksi dari sensor ultrasonic ping ini sesuai dengan kebutuhan penggunaan dari
sensor tersebut. Ketika sensor disetting jaraknya maka dengan jarak yang telah
ditentukanlah sensor akan bekerja dalam pendeteksian objek. Kisaran jarak yang
dapat di baca sensor ultrasonic ping ini adalah 3 cm sampai 3 m.
Selain range jarak antara 3 cm sampai 3 m yang mampu dideteksi oleh
sensor ultrasonik ping, sudut pancaran dari sensor jarak ultrasonic ping adalah
dari 0o sampai dengan 30o
Sensor Jarak Ultrasonik Devantech SRF04
Sensor jarak merupakan sensor yang wajib ada pada robot terkini.
Devantech SRF04 adalah salah satu sensor jarak yang paling banyak digunakan
pada kontes robot di indonesia selain ping Devantech. SRF04 ultrasonik range
finder memberikan informasi jarak dari kisaran 3 cm – 3 m. Harga sensor ini tidak
lebih dari Rp 360.000,00.Anda juga dapat membeli SRF05 yang harganya lebih
murah dibandingkan SRF04 dengan kualitas yang tidak jauh berbeda.
Kit ini sangat mudah untuk dirangkai dan membutuhkan sumber daya yang
kecil sekali, yang sangat ideal untuk aplikasi mobil robot pencari jarak ini
bekerjadengan cara memancarkan pulsa suara dengan kecepatan suara ( 0,9
ft/milidetik 2.4 Diagram Sinyal Ultrasonik
Sinyal pulsa pendek sepanjang 10µS ditransmisikan di waktu awal 0,
masukan dari modul ini untuk mulai pendeteksian (catat waktu saat ini), HC-SR04
akan memancarkan 8 siklus gelombang ultrasonik pada frekuensi 40 kHz. Saat
gelombang suara ini menabrak objek (benda atau dinding di depannya),
gelombang akan dipantulkan balik dan diterima oleh detektor yang kemudian
membangkitkan sinyal deteksi di pin keluaran modul (Echo pulse). Lama selang
waktu antara pengiriman signal hingga pendeteksian sinyal pantulan adalah waktu
yang ditempuh gelombang suara, yaitu sepanjang dua kali jarak antara sensor dan
objek yang terdeteksi karena signal berjalan pulang-pergi. Dengan mengetahui
selang waktu ini dan kecepatan rambat suara di udara (340 meter/detik pada udara
kering, atau 3,4x108µs), jarak dapat dihitung sesuai rumus jarak = kecepatan x
waktu.
2.5 Arduino Uno
Arduino Uno adalah salah satu kit
ATmega28.Modul ini sudah dilengkapi dengan berbagai hal yang dibutuhkan
untuk mendukung mikrokontroler untuk bekerja, hanya sambungkan ke power
suply atau sambungkan melalui kabel USB ke PCmu Arduino Uno ini sudah siap
sedia. Arduino Uno ini memilki 14 pin digital input/output, 6 analog input, sebuah
resonator keramik 16MHz, koneksi USB, colokan power input, ICSP header, dan
sebuah tombol reset.
Gambar 2.10 Board Arduino Uno
Arduino memiliki kelebihan tersendiri dibanding board mikrokontroler
yang lain selain bersifat open source, arduino juga mempunyai bahasa
pemrogramanya sendiri yang berupa bahasa C. Selain itu dalam board arduino
kita memprogram mikrokontroler didalam arduino. Sedangkan pada kebanyakan
board mikrokontroler yang lain yang masih membutuhkan rangkaian loader
terpisah untuk memasukkan program ketika kita memprogram mikrokontroler.
Port USB tersebut selain untuk loader ketika memprogram, bisa juga difungsikan
sebagai port komunikasi serial.
Arduino menyediakan 20 pin I/O, yang terdiri dari 6 pin input analog dan
14 pin digital input/output. Untuk 6 pin analog sendiri bisa juga difungsikan
sebagai output digital jika diperlukan output digital tambahan selain 14 pin yang
sudah tersedia. Untuk mengubah pin analog menjadi digital cukup mengubah
konfigurasi pin pada program. Dalam board kita bisa lihat pin digital diberi
keterangan 0-13, jadi untuk menggunakan pin analog menjadi output digital, pin
analog yang pada keterangan board 0-5 kita ubah menjadi pin 14-19. dengan kata
lain pin analog 0-5 berfungsi juga sebagi pin output digital 14-16.
Sifat open source arduino juga banyak memberikan keuntungan tersendiri
untuk kita dalam menggunakan board ini, karena dengan sifat open source
komponen yang kita pakai tidak hanya tergantung pada satu merek, namun
memungkinkan kita bisa memakai semua komponen yang ada dipasaran.
Bahasa pemrograman arduino merupakan bahasa C yang sudah
disederhanakan syntax bahasa pemrogramannya sehingga mempermudah kita
dalam mempelajari dan mendalami mikrokontroller.
Tabel 2.2 Deskripsi Arduino Uno
• Power
Arduino dapat diberikan power melalui koneksi USB atau power
supply.Powernya diselek secara otomatis.Power supply dapat menggunakan
adaptor DC atau baterai. Adaptor dapat dikoneksikan dengan mencolok jack
adaptor pada koneksi port input supply. Board arduino dapat dioperasikan
menggunakan supply dari luar sebesar 6 - 20 volt. Jika supply kurang dari 7V,
kadangkala pin 5V akan menyuplai kurang dari 5 volt dan board bisa menjadi
tidak stabil. Jika menggunakan lebih dari 12 V, tegangan di regulator bisa menjadi
sangat panas dan menyebabkan kerusakan pada board.Rekomendasi tegangan ada
pada 7 sampai 12 volt.
Penjelasan pada pin power adalah sebagai berikut :
Tegangan input ke board arduino ketika menggunakan tegangan dari luar (seperti
yang disebutkan 5 volt dari koneksi USB atau tegangan yang diregulasikan).
Pengguna dapat memberikan tegangan melalui pin ini, atau jika tegangan suplai
menggunakan power jack, aksesnya menggunakan pin ini.
• 5V
Regulasi power supply digunakan untuk power mikrokontroller dan komponen
lainnya pada board. 5V dapat melalui Vin menggunakan regulator pada board,
atau supply oleh USB atau supply regulasi 5V lainnya.
• 3V3
Suplai 3.3 volt didapat oleh FTDI chip yang ada di board. Arus maximumnya
adalah 50mA
• Pin Ground
berfungsi sebagai jalur ground pada arduino
• Memori
ATmega328 memiliki 32 KB flash memori untuk menyimpan kode, juga 2 KB
yang digunakan untuk bootloader. ATmega328 memiliki 2 KB untuk SRAM dan
1 KB untuk EEPROM.
2.6 Input & Output
Setiap 14 pin digital pada arduino dapat digunakan sebagai input atau
output, menggunakan fungsi pinMode(), digitalWrite(), dan digitalRead().
Input/output dioperasikan pada 5 volt.Setiap pin dapat menghasilkan atau
menerima maximum 40 mA dan memiliki internal pull-up resistor (disconnected
Beberapa pin memiliki fungsi sebagai berikut :
• Serial : 0 (RX) dan 1 (TX). Digunakan untuk menerima (RX) dan mengirim
(TX) TTL data serial. Pin ini terhubung pada pin yang koresponding dari
USB ke TTL chip serial.
• Interupt eksternal : 2 dan 3. Pin ini dapat dikonfigurasikan untuk trigger
sebuah interap pada low value, rising atau falling edge, atau perubahan nilai.
• PWM : 3, 5, 6, 9, 10, dan 11. Mendukung 8-bit output PWM dengan fungsi
analogWrite().
• SPI : 10 (SS), 11 (MOSI), 12 (MISO), 13 (SCK). Pin ini mensuport
komunikasi SPI, yang mana masih mendukung hardware, yang tidak
termasuk pada bahasa arduino.
• LED : 13. Ini adalah dibuat untuk koneksi LED ke digital pin 13. Ketika pin
bernilai HIGH, LED hidup, ketika pin LOW, LED mati.
2.
• Mikrokontroler ATmega328
• Catu Daya 5V
• Teganan Input (rekomendasi) 7-12V
• Teganan Input (batasan) 6-20V
• Pin I/O Digital 14 (of which 6 provide PWM output)
• Pin Input Analog 6
• Arus DC per Pin I/O 40 mA
• Arus DC per Pin I/O untuk PIN 3.3V 50 mA
• Flash Memory 32 KB (ATmega328) dimana 0.5 KB digunakan oleh
• SRAM 2 KB (ATmega328)
• EEPROM 1 KB (ATmega328)
• Clock Speed 16 MHz
2.8 Software Arduino
Arduino Uno dapat diprogram dengan perangkat lunak Arduino .Pada
ATMega328 di Arduino terdapat bootloader yang memungkinkan Anda untuk
meng-upload kode baru untuk itu tanpa menggunakan programmer hardware
eksternal.
IDE Arduino adalah software yang sangat canggih ditulis dengan menggunakan
Java. IDE Arduino terdiri dari:
1. Editor program, sebuah window yang memungkinkan pengguna menulis
dan mengeditprogram dalam bahasa Processing.
2. Compiler, sebuah modul yang mengubah kode program (bahasa
Processing) menjadi kode biner. Bagaimanapun sebuah mikrokontroler
tidak akan bisa memahami bahasa Processing. Yang bisa dipahami oleh
mikrokontroler adalah kode biner. Itulah sebabnya compiler diperlukan
dalam hal ini.
3. Uploader, sebuah modul yang memuat kode biner dari komputer ke dalam
memory didalam papan Arduino.Sebuah kode program Arduino umumnya
disebut dengan istilah sketch. Kata“sketch” digunakan secara bergantian
Gambar 2.11 Tampilan IDE Arduino dengan sebuah sketch
Bahasa Pemograman Arduino Berbasis Bahasa C
Seperti yang telah dijelaskan diatas program Arduino sendiri menggunakan
bahasa C. walaupun banyak sekali terdapat bahasa pemrograman tingkat tinggi
(high level language) seperti pascal, basic, cobol, dan lainnya. Walaupun
demikian, sebagian besar dari paraprogramer profesional masih tetap memilih
bahasa C sebagai bahasa yang lebih unggul, berikut alasan-alasannya:
• Bahasa C merupakan bahasa yang powerful dan fleksibel yang telah terbukti
dapat menyelesaikan program-program besar seperti pembuatan sistem
operasi, pengolah gambar (seperti pembuatan game) dan juga pembuatan
• Bahasa C merupakan bahasa yang portabel sehingga dapat dijalankan di
beberapa sistem operasi yang berbeda. Sebagai contoh program yang kita
tulis dalam sistem operasi windows dapat kita kompilasi didalam sistem
operasi linux dengan sedikit ataupun tanpa perubahan sama sekali.
• Bahasa C merupakan bahasa yang sangat populer dan banyak digunakan oleh
programer berpengalaman sehingga kemungkinan besar library
pemrograman telah banyak disediakan oelh pihak luar/lain dan dapat
diperoleh dengan mudah.
• Bahasa C merupakan bahasa yang bersifat modular, yaitu tersusun atas
rutin-rutin tertentu yang dinamakan dengan fungsi (function) dan fungsi-fungsi
tersebut dapat digunakan kembali untuk pembuatan program-program
lainnya tanpa harus menulis ulang implementasinya.
• Bahasa C merupakan bahasa tingkat menengah (middle level language)
sehingga mudah untuk melakukan interface (pembuatan program antar
muka) ke perangkat keras.
• Struktur penulisan program dalam bahasa C harus memiliki fungsi utama,
yang bernama main(). Fungsi inilah yang akan dipanggil pertama kali pada
saat proses eksekusi program. Artinya apabila kita mempunyai fungsi lain
selain fungsi utama, maka fungsi lain tersebut baru akan dipanggil pada saat
digunakan.
Oleh karena itu bahasa C merupakan bahasa prosedural yang menerapakan
konsep runtutan (program dieksekusi per baris dari atas ke bawah secara
berurutan), maka apabila kita menuliskan fungsi-fungsi lain tersebut dibawah
dimaksudkan untuk mengenalkan terlebih dahulu kepada kompiler daftar fungsi
yang akan digunakan di dalam program. Namun apabila kita menuliskan
fungsi-fungsi lain tersebut diatas atau sebelum fungsi-fungsi utama, maka kita tidak perlu lagi
untuk menuliskan bagian prototipe diatas.
Selain itu juga dalam bahasa C kita akan mengenal file header, biasa
ditulis dengan ekstensi h(*.h), adalah file bantuan yang yang digunakan untuk
menyimpan daftar-daftar fungsi yang akan digunakan dalam program. Bagi anda
yang sebelumnya pernah mempelajari bahasa pascal, file header ini serupa dengan
unit. Dalam bahasa C, file header standar yang untuk proses input/output adalah
<stdio.h>.
Perlu sekali untuk diperhatikan bahwa apabila kita menggunakan file
header yang telah disediakan oleh kompilator, maka kita harus menuliskannya
didalam tanda‘<’ dan ‘>’
(misalnya<stdio.h>). Namun apabila menggunakan file header yang kita
buat sendiri, maka file tersebut ditulis diantara tanda “ dan ” (misalnya
“cobaheader.h”). perbedaan antara keduanya terletakpada saat pencerian file
tersebut. Apabila kita menggunakan tanda <>, maka file tersebut dianggap berada
pada direktori deafault yang telah ditentukan oleh kompilator.Sedangkan apabila
kita menggunakan tanda “”, maka file header dapat kita dapat tentukan sendiri
lokasinya.
File header yang akan kita gunakan harus kita daftarkan dengan
menggunakan directive #include. Directive #include ini berfungsi untuk memberi
tahu kepada kompilator bahwa program yang kita buat akan menggunakan
#include<stdio.h>
#include<stdlib.h>
#include”myheader.h”
Setiap kita akan menggunakan fungsi tertentu yang disimpan dalam
sebuah file header, maka kita juga harus mendaftarkan file headernya dengan
menggunakan directive #include. Sebagai contoh, kita akan menggunakan fungsi
getch() dalam program, maka kita harus mendaftarkan file header<conio.h>.
Perlindungan Arus USB
Arduino Uno memiliki polyfuse reset yang melindungi port USB komputer Anda
dari arus pendek atau berlebih. Meskipun kebanyakan komputer memberikan
perlindungan internal sendiri, sekering menyediakan lapisan perlindungan
tambahan.Jika lebih dari 500 mA, sekering otomatis bekerja.
Karakteristik Fisik
Panjang maksimum dan lebar PCB Uno masing-masing adalah 2,7 dan 2,1 inci,
dengan konektor USB dan colokan listrik yang melampaui dimensi tersebut.
Empat lubang sekrup memungkinkan board harus terpasang ke permukaan.
Perhatikan bahwa jarak antara pin digital 7 dan 8 adalah 0,16", tidak seperti pin
lainnya.
2.9 Menghitung Jarak
Jarak merupakan panjang lintasan yang dilalui.Jarak menyatakan panjang atau
jauh antara dua benda atau tempat. Panjang atau jauh (jalan) antara Madiun dan
Malang adalah 184 km, artinya jarak antara kota Madiun dan Malang adalah 184
km. Satuan yang digunakan untuk menyatakan jarak sama dengan satuan panjang,
(dm), centimeter (cm), dan milimeter (mm).Tetapi, satuan yang sering digunakan
adalah kilometer (km) dan meter (m).
• Satuan Kecepatan
Kecepatan adalah waktu yang digunakan untuk menempuh jarak tertentu, dalam
waktu tertentu.Kecepatan dapat diukur secara langsung menggunakan alat yang
dinamakan spedometer.Spedometer terdapat pada kendaraan bermotor dan
kendaraan roda empat.Alat ini berguna untuk menunjukkan kecepatan kendaraan
pada saat melaju di jalan.Satuan kecepatannya km/jam. Satuan kecepatan
dirumuskan sebagai berikut :
Satuan Kecepatan = Satuan Jarak : Satuan waktu
Menentukan Kecepatan
bahwa satuan kecepatan =Satuan jarak / satuan waktu . Dari satuan kecepatan ini
dapat diturunkan rumus kecepatan yaitu: Kecepatan = Jarak yang ditempuh :
waktu yang ditempuh.Misal kecepatan = v, jarak yang ditempuh = s, dan Waktu
tempuh = t, rumus kecepatan dapat ditulis:
V = S : T
Menyelesaikan Masalah yang Berkaitan dengan Waktu, Jarak, dan
Kecepatan Masalah yang berkaitan dengan waktu, jarak, dan kecepatan adalah
perjalanan.Waktu, berkaitan dengan keberangkatan, lama perjalanan, waktu
istirahat, dan saat sampai atau tiba di tempat tujuan. Jarak, menyatakan panjang
atau jauhnya perjalanan yang dilakukan antara 2 tempat (dua kota, dsb).
tertentu.Kecepatan selalu berhubungan antara waktu dan jarak.Kecepatan 60
km/jam, artinya dalam waktu 1 jam ditempuh jarak sejauh 60 km.
2.10 Liquid Crystal Display (LCD)
LCD merupakan salah satu komponen penting dalam pembuatan tugas akhir ini
karena LCD dapat menampilkan perintah-perintah yang harus dijalankan oleh
pemakai. LCD mempunyai kemampuan untuk menampilkan tidak hanya angka,
huruf abjad, kata-kata tapi juga simbol-simbol.
Jenis dan ukuran LCD bermacam-macam, antara lain 2x16, 2x20, 2x40,
dan lain-lain. LCD mempunyai dua bagian penting yaitu backlight yang berguna
jika digunakan pada malam hari dan contrast yang berfungsi untuk mempertajam
tampila
Gambar 2.12 Bentuk fisik LCD 2x16 karakter
Display LCD sebuah liquid crystal atau perangkat elektronik yang dapat
digunakan untuk menampilkan angka atau teks. Ada dua jenis utama layar LCD
yang dapat menampilkan numerik (digunakan dalam jam tangan, kalkulator dll)
dan menampilkan teks alfanumerik (sering digunakan pada mesin foto kopi dan
Dalam menampilkan numerik ini kristal yang dibentuk menjadi bar, dan
dalam menampilkan alfanumerik kristal hanya diatur kedalam pola titik. Setiap
kristal memiliki sambungan listrik individu sehingga dapat dikontrol secara
independen. Ketika kristal off' (yakni tidak ada arus yang melalui kristal) cahaya
kristal terlihat sama dengan bahan latar belakangnya, sehingga kristal tidak dapat
terlihat. Namun ketika arus listrik melewati kristal, itu akan merubah bentuk dan
menyerap lebih banyak cahaya. Hal ini membuat kristal terlihat lebih gelap dari
penglihatan mata manusia sehingga bentuk titik atau bar dapat dilihat dari
perbedaan latar belakang.
Sangat penting untuk menyadari perbedaan antara layar LCD dan layar
LED. Sebuah LED display (sering digunakan dalam radio jam) terdiri dari
sejumlah LED yang benar-benar mengeluarkan cahaya (dan dapat dilihat dalam
gelap). Sebuah layar LCD hanya mencerminkan cahaya, sehingga tidak dapat
dilihat dalam gelap.
LMB162A adalah modul LCD matrix dengan konfigurasi 16 karakter dan
2 baris dengan setiap karakternya dibentuk oleh 8 baris pixel dan 5 kolom pixel (1
baris terakhir adalah kursor). Memori LCD terdiri dari 9.920 bir CGROM, 64 byte
CGRAM dan 80x8 bit DDRAM yang diatur pengalamatannya oleh Address
Counter dan akses datanya (pembacaan maupun penulisan datanya) dilakukan
melalui register data.
Pada LMB162A terdapat register data dan register perintah. Proses akses
data ke atau dari register data akan mengakses ke CGRAM, DDRAM atau
ke atau dari Register perintah akan mengakses Instruction Decoder (dekoder
instruksi) yang akan menentukan perintah–perintah yang akan dilakukan oleh
LCD
LCD memanfaatkan silikon atau galium dalam bentuk kristal cair sebagai
pemancar cahaya. Pada layar LCD, setiap matrik adalah susunan dua dimensi
piksel yang dibagi dalam baris dan kolom. Dengan demikian, setiap pertemuan
baris dan kolom adalah sebuah LED terdapat sebuah bidang latar ( backplane),
yang merupakan lempengan kaca bagian belakang dengan sisi dalam yang
ditutupi oleh lapisan elektroda transparan.
Dalam keadaan normal, cairan yang digunakan memiliki warna cerah.
Daerah – daerah tertentu pada cairan akan berubah warnanya menjadi hitam
ketika tegangan diterapkan antara bidang latar dan pola elektroda yang terdapat
pada sisi dalam lempeng kaca bagian depan.
Keunggulan LCD adalah hanya menarik arus yang kecil (beberapa mikro ampere
) , sehingga alat atau sistem menjadi portable karena dapat menggunakan catu
daya yang kecil. Keunggulan lainnya adalah tampilan yang diperlihatkan dapat
dibaca dengan mudah dibawah terang sinar matahari. Dibawah sinar cahaya yang
remang – remang atau dalam kondisi gelap, sebuah lampu ( berupa LED ) harus
dipasang dibelakang layar tampilan.
LCD yang digunakan adalah jenis LCD yang menapilkan data dengan 2
baris tampilan pada display. Keuntungan dari LCD adalah :
1. Dapat menampilkan karakter ASCII, sehingga dapat memudahkan
2. Mudah dihubungkan dengan port I/O karena menggunakan 8 bit data
dan 3 bit kontrol.
3. Ukuran modul yang proporsional.