Kendali Logika Fuzzy Pada Robot Line Follower
Teks penuh
Gambar


Garis besar
Dokumen terkait
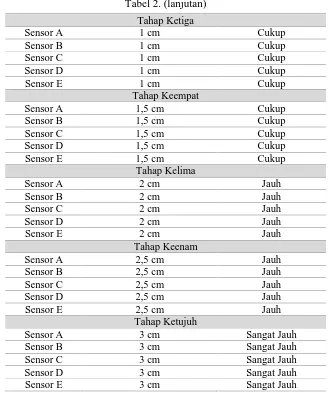
Sebagai input dari sistem fuzzy adalah jarak robot wall follower ke dinding dalam 5 arah dan posisi robot wall follower terhadap target dalam bentuk
Dalam perancangan robot mobil penjejak dinding koridor, yang disimulasikan dengan dinding kanan dan kiri pada lintasannya, kendali logika fuzzy menunjukkan performa
Dari hasil pengujian diperoleh bahwa kendali logika fuzzy yang diaplikasikan pada robot IPBD dapat menjaga keseimbangan robot dengan osilasi pada sudut -2 hingga 2
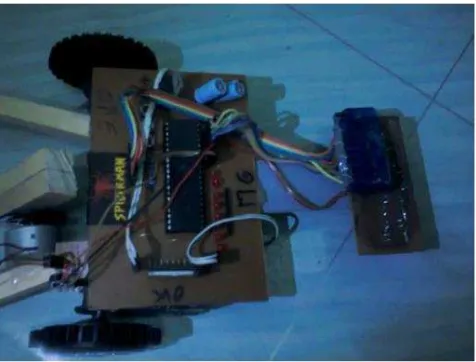
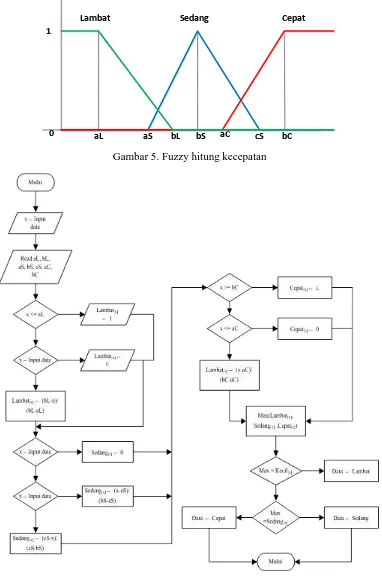
Pada tulisan ini, pengembangan robot LF terus ditingkatkan kepintarannya, karena kelemahan robot LF selama ini adalah tidak ada kendali kecepatan gerak kedua motor
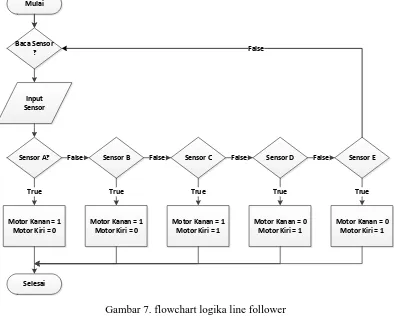
Robot line follower atau robot pengikut garis adalah suatu jenis robot yang pergerakannya dengan mendeteksi garis sehingga robot tersebut dapat melakukan
Dibutuhkan sebuah sistem kendali untuk mengatur keseimbangan robot line follower, sehingga dapat bergerak dengan stabil dan mampu mengatasi gangguan yang diberikan
Maka pada tugas akhir ini akan dibuat pemodelan mobile robot berpenggerak differensial menggunakan metode kendali logika fuzzy dan Particle Swarm Optimization
Kesimpulan Robot line follower pada penelitian ini diaplikasikan untuk memindahkan dan mengambil benda berdasarkan 6 jenis warna, dirancang menggunakan kendali PID dengan pencarian
