INTISARI
Untuk membudidayakan ikan air tawar, kualitas air menjadi faktor yang paling mendukung dalam perkembangan ikan. Banyak alat pengukur kualitas air yang sudah dibuat, tetapi dalam penggunaannya masih secara manual dan data yang didapat tidak dapat direkam. Oleh karena itu, dibuat sistem yang dapat mengambil data dari setiap sensor kualitas air secara otomatis dan dapat dikirimkan ke pusat data secara wireless.
Sistem ini menggunakan ATMega128 sebagai pusat kontrol dan menggunakan RFM12-433S untuk transmitter. Sensor yang diukur adalah sensor suhu, kekeruhan, keasaman dan kandungan oksigen. Sistem akan mengambil data secara wireless menggunakan komunikasi USART setiap beberapa waktu sesuai dengan pengaturan pengguna, kemudian data tersebut dibandingkan dengan standar kualitas air ikan untuk mengendalikan sistem kendali agar kualitas air bisa diatur sesuai dengan standar kualitas air kolam ikan yang baik untuk pertumbuhan ikan. Setelah itu, data yang dikumpulkan dari setiap sensor dikirimkan ke bagian pusat data untuk disimpan dan ditampilkan secara visual.
Remote unit dengan RFM12-433S untuk sistem telemetri kualitas kolam air ikan sudah berhasil dibuat dengan menggunakan 3 pilihan frekuensi dan 3 pilihan kecepatan transfer data. Frekuensi yang digunakan adalah 432MHz, 435MHz dan 437MHz, sedangkan kecepatan transfer data yang digunakan 1kbps, 2kbps dan 5kbps. Sistem ini sudah diuji dengan jarak maksimum pengujian pada jarak 15 meter untuk pengiriman paket data.
ABSTRACT
To cultivate freshwater fish , the quality of water as the factor that most support in the development of fish. Many a measuring instrument the quality of water already made, but the use of still manually and data obtained not can be recorded. Because of that, made system can take s data of any water quality sensors automatically and may be transmitted to the center data is wireless.
This system uses atmega128 as central control and use RFM12-433S to transmitter. The sensor is measured temperature sensors, cloudiness, the acidity and oxygen content. The system will take data is a wireless use every communication USART some time in accordance with the users, then the data compared with standard fish water quality control system to control to the quality of water can be arranged in accordance with standard quality of the pond water fish is good for the growth of fish. After that, the data collected from each sensor was sent to the center of the data to be stored and displayed visually.
The remote unit with RFM12-433S for telemetry system of the quality of the fish ponds was successfully created by using 3 option frequency and 3 option speed of data transfer. Frequencies used are 432MHz, 435MHz and 437MHz, while the speed of data transfer that is used 1kbps, 2kbps and 5 Kbps. This system has been tested in a maximum of 15 meters range for the package delivery.
TUGAS AKHIR
REMOTE UNIT DENGAN RFM12-433S
UNTUK SISTEM TELEMETRI KUALITAS AIR
KOLAM IKAN
Diajukan untuk memenuhi salah satu syarat
Memperoleh gelar Sarjana Teknik pada
Program Studi Teknik Elektro
Jurusan Teknik Elektro
Fakultas Sains dan Teknologi Universitas Sanata Dharma
disusun oleh:
ANDREAS BAGUS SADEWO
NIM : 115114008
PROGRAM STUDI TEKNIK ELEKTRO
JURUSAN TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
FINAL PROJECT
REMOTE UNIT WITH RFM12-433S
FOR FISH POND WATER QUALTY TELEMETRY
SYSTEM
In partial fulfillment of requirements
For the degree of Sarjana Teknik
In Electrical Engineering Study Program
ANDREAS BAGUS SADEWO
NIM : 115114008
ELECTRICAL ENGINERING STUDY PROGRAM
ELECTRICAL ENGINERING DEPARTMENT
FACULTY OF SCIENCE AND TECHNOLOGI FACULTY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
LEMBAR PERSETUruAN
TU.GAS
AKHIR
REMOTE
(TNTI'DENGAN
RFM12.433S
UNTUK SISTEM
TELEMETRI KU
KOLAM
AIRIKAN
Pius Yo,zy Mmucahyo M T. Taaggal:
3O J,.li
Zotg
HALAMAN
PENGESAHANTUGAS
AKHIR
REMOTE UNIT
DENGAN
RFM12.433S
UNTUK SISTEM
TELEMETRI KUALITAS KOLAM AIR
IKAN
Ketua
Sekretaris
Anggota
.,, t . "'tt 't:'t
' '
disusun oleh:
,,AfiS
Sn,lcus.s
re,${Q',r'','
1\[IM :115114008
"',,,'.',l: ,. ',,.',,.
j. ,.
Telah dipertahankan di depan panitia penguji
Pada tanggal'30 Juli 2015
dan dinyatakan-'rrr€menuhi syarat ., .,€ifr .:.
-:
,,
)-i
t,'':'
.u#
;.*
'.
r,;
7!l
,.., :,- iil ,..:lti;::it,,,-,11,
,,
glt; ":_ "."- ",fdr_-n"t-**i'"-',,"1
.i":. . . ! ,#
gry
samarno
_*,'.ji#-
-Y ozy ltfdyuqahyo, ST.M.T.
t :'l .''t ,
.. .:' r;i "''''$ryOnJOnO j"
4 ' :.: .1: j+ ;l !.i::1{;iL*,i&*id.:l'.;!i,1
Yogyakarta,
t9
fijvrtus
2ol5
{*
Fakultas Sains dan Teknologi Universitas Sa nata Dharma
Rosa, S. Si, M. Sc.
PER}IYATAAI\I
KEASLTAN
KARYA
Saya menyatakan dengan sesungguhnya bahwa tugas akfiir ini ti,tak me,muat karya
atau bagian karya orang lain" kecuali yang telah disebutkan dalam kutipan dan daftar
pustaka sebagaimana layaknla karya
ilmiab-Yogyakarta, 14 Juni 2015
M
HALAMAN
PERSEMBAHAN
DAhtMOTTO
HIDI}P
1do{{o:
Kegagaf,m,$&nyafniaffi
tsitn
Kita
ffi
nyerafi.
*Lesstng
Sbr'q
ti/
int bq
e"rwnln
h*-a,w or*tfu*r:Yeru*Kri&l*JurwSl*mat?'*
tsapa*4
flrw
da,vv Adikl<,u"*rwy
a,ng
rcdrui,nk,
k**a,*ihk* furqhlta/
S
alu,l>at
da,wbrna,w - @rn^a,$*.w
LEMBAR
PER]\YATAAI\
PERSETUJUAI\TPT'BLIKASI KARYA
ILMIAII
[}NT"TIKKEPENTINGAN AKADEMIS
Yang bertanda tangan di bawah ini, saya mahasiswa Universitas Sanata Dharma:
Nama
: Andreas Bagus Sadewo NomorMahasiswa
: 115114008Demi
pengembangan ilmu pengetahuan, saya memberikan kepada PerpustakaanUniversitas Sanata Dharma karya ilmiah saya yang berjudul:
REMOTE UNIT DENGAN RFMI2.433S UNTUK SISTEM
TELEMETRI KUALITAS
KOLAM
AIR
IKAN
Beserta perangkat yang diperlukan (bila ada). Dengan demikian saya memberikan kepada
Perpustakaan Universitas Sanata Dharma hak untuk menyimpan, mengalihkan dalam
bentuk media lain, mengolanya dalam bentuk pangkalan data, mendistribusikan secara
terbatas, dan mempublikasikannya di Intemet atau media lain untuk kepentingan akademis
tanpa perlu meminta ijin dari saya maupun memberikan royalty kepada saya selamatelap
mencantumkan nama saya sebagai penulis.
Demikian pemyataan ini saya buat dengan sebenarnya.
Yogyakarta, 14 Juni 2015
W
Andreas Bagus Sadewoviii
INTISARI
Untuk membudidayakan ikan air tawar, kualitas air menjadi faktor yang paling mendukung dalam perkembangan ikan. Banyak alat pengukur kualitas air yang sudah dibuat, tetapi dalam penggunaannya masih secara manual dan data yang didapat tidak dapat direkam. Oleh karena itu, dibuat sistem yang dapat mengambil data dari setiap sensor kualitas air secara otomatis dan dapat dikirimkan ke pusat data secara wireless.
Sistem ini menggunakan ATMega128 sebagai pusat kontrol dan menggunakan RFM12-433S untuk transmitter. Sensor yang diukur adalah sensor suhu, kekeruhan, keasaman dan kandungan oksigen. Sistem akan mengambil data secara wireless menggunakan komunikasi USART setiap beberapa waktu sesuai dengan pengaturan pengguna, kemudian data tersebut dibandingkan dengan standar kualitas air ikan untuk mengendalikan sistem kendali agar kualitas air bisa diatur sesuai dengan standar kualitas air kolam ikan yang baik untuk pertumbuhan ikan. Setelah itu, data yang dikumpulkan dari setiap sensor dikirimkan ke bagian pusat data untuk disimpan dan ditampilkan secara visual.
Remote unit dengan RFM12-433S untuk sistem telemetri kualitas kolam air ikan sudah berhasil dibuat dengan menggunakan 3 pilihan frekuensi dan 3 pilihan kecepatan transfer data. Frekuensi yang digunakan adalah 432MHz, 435MHz dan 437MHz, sedangkan kecepatan transfer data yang digunakan 1kbps, 2kbps dan 5kbps. Sistem ini sudah diuji dengan jarak maksimum pengujian pada jarak 15 meter untuk pengiriman paket data.
ix
ABSTRACT
To cultivate freshwater fish , the quality of water as the factor that most support in the development of fish. Many a measuring instrument the quality of water already made, but the use of still manually and data obtained not can be recorded. Because of that, made system can take s data of any water quality sensors automatically and may be transmitted to the center data is wireless.
This system uses atmega128 as central control and use RFM12-433S to transmitter. The sensor is measured temperature sensors, cloudiness, the acidity and oxygen content. The system will take data is a wireless use every communication USART some time in accordance with the users, then the data compared with standard fish water quality control system to control to the quality of water can be arranged in accordance with standard quality of the pond water fish is good for the growth of fish. After that, the data collected from each sensor was sent to the center of the data to be stored and displayed visually.
The remote unit with RFM12-433S for telemetry system of the quality of the fish ponds was successfully created by using 3 option frequency and 3 option speed of data transfer. Frequencies used are 432MHz, 435MHz and 437MHz, while the speed of data transfer that is used 1kbps, 2kbps and 5 Kbps. This system has been tested in a maximum of 15 meters range for the package delivery.
x
KATA PENGANTAR
Syukur dan terima kasih kepada Tuhan Yesus Kristus karena dengan segala rahmat dan bimbingan-Nya maka tugas akhir dengan judul “Remote Unit Dengan Rfm12-433S Untuk Sistem Telemetri Kualitas Kolam Air Ikan” dapat diselesaikan dengan baik. Selama menulis tugas akhir ini, penulis menyadari bahwa ada begitu banyak pihak yang telah memberikan bantuan dengan cara masing – masing, sehingga tugas akhir ini bisa diselesaikan. Oleh karena itu penulis ingin mengucapkan terima kasih kepada:
1. Ibu P. H. Prima Rosa, S. Si., M. Sc., selaku Dekan Fakultas Sains dan Teknologi Univesitas Sanata Dharma.
2. Bapak Pius Yozy Merucahyo, ST.,M.T., selaku dosen pembimbing yang dengan penuh kesabaran membimbing, memberikan saran dan kritik yang membantu penulis dalam menyelesaikan tulisan ini.
3. Bapak Dr. Linggo Sumarno dan Bapak Dr. Iswanjono selaku dosen penguji. 4. Bapak Martanto, M.T. dan Ibu Bernadeta Wuni Harini, M.T. yang telah
memberikan saran dan kritik yang membantu penulis dalam menyelesaikan tulisan ini.
5. Seluruh dosen prodi Teknik Elektro dan laboran yang telah memberikan ilmu pengetahuan kepada penulis selama kuliah.
6. Bapak dan Ibu tercinta, terima kasih untuk semua perhatian dan dukungan baik spiritual maupun material.
7. Christin Karuru, terima kasih karena telah memberikan motivasi dan semangat untuk segera menyelesaikan penulisan tugas akhir ini.
8. Teman – teman prosi Teknik Elektro angkatan 2011, atas kebersamaannya selama penulis menjalani studi.
xi
Dengan rendah hati penulis menyadari bahwa tugas akhir ini masih jauh dari sempurna, oleh karena itu berbagai kritik dan saran untuk perbaikan tugas akhir ini sangat diharapkan. Akhir kata, semoga tugas akhir ini dapat bermanfaat bagi semua pihak. Terima kasih.
Yogyakarta, 14 Juni 2015
xii
DAFTAR ISI
Halaman
HALAMAN JUDUL (Bahasa Indonesia) ... i
HALAMAN JUDUL (Bahasa Inggris) ... ii
HALAMAN PERSETUJUAN ... iii
HALAMAN PENGESAHAN ... iv
PERNYATAAN KEASLIAN KARYA ... v
HALAMAN PERSEMBAHAN DAN MOTTO HIDUP ... vi
LEMBAR PERNYATAAN PERSETUJUAN PUBLIKASI KARYA ILMIAH UNTUK KEPENTINGAN AKADEMIS ... vii
INTISARI ... viii
ABSTRACT ... ix
KATA PENGANTAR ... x
DAFTAR ISI ... xii
DAFTAR GAMBAR ... xv
DAFTAR TABEL ... xvii
BAB I PENDAHULUAN 1.1. Latar Belakang ... 1
1.2. Tujuan dan Manfaat Penelitian ... 2
1.3. Batasan Masalah ... 2
1.4. Metodologi Penelitian ... 3
BAB II DASAR TEORI ... 4
2.1. Kualitas Air Kolam Ikan... 4
2.1.1 Temperatur Air... 4
2.1.2 Keasaman (pH) ... 4
2.1.3 Kekeruhan ... 4
2.1.4 Kandungan Oksigen ... 5
2.2. Mikrokontroler ATmega128... 5
2.2.1 Port Input / Output ... 6
2.2.2 Serial Periperal Interface (SPI) ... 7
2.2.3 – Two-Wire Serial Communication ... 9
xiii
2.3. RFM12-433S ... 10
2.4. LCD 16x2 ... 12
2.5. Modulasi Digital ... 13
2.5.1. Modulasi FSK ... 13
2.5.2. Demodulasi FSK ... 14
2.6. IC DS1307 –Real Time Clock (RTC) ... 15
2.7. Catu Daya ... 16
2.8. LED (Light – Emitting Diode) ... 17
2.9. Sistem Pengendali Air Kolam ... 18
BAB III RANCANGAN PENELITIAN ... 19
3.1. Perancangan Perangkat Keras ... 20
3.1.1. Rangkaian RTC – IC DS1307 ... 20
3.1.2. Rangkaian LCD ... 21
3.1.3. Rangkaian DT-AVR ATMEGA128 CPU Module ... 21
3.1.4. Rangkaian Catu Daya ... 23
3.2. Perancangan Perangkat Lunak ... 24
3.2.1. Diagram Alir Program Utama ... 24
3.2.2. Diagram Alir Program Menu ... 25
3.2.3. Diagram Alir Subrutin Pengaturan Sistem Kendali ... 27
3.2.4. Diagram Alir Subrutin Pengiriman Paket data ... 28
3.2.5. Diagram Alir Subrutin Pengambilan Data Sensor ... 29
3.2.6. Diagram Alir Subrutin Ping ... 30
3.2.7. Diagram Alir Subrutin Kendali ... 31
3.2.8. Format Paket Data ... 33
3.2.9. Pengaturan Frekuensi Kerja RFM12 ... 33
3.2.10. Prosedur Pengiriman Data dengan RFM12 ... 34
3.2.11. Prosedur Penerimaan Data dengan RFM12... 35
3.2.12. Data Dummy ... 36
BAB IV HASIL DAN PEMBAHASAN ... 38
4.1. Bentuk Fisik Remote Unit dan Hardware Elektronik ... 38
4.1.1. Bentuk Fisik Remote Unit ... 38
4.1.2. Subsistem Elektronik Alat ... 39
xiv
4.2.1. Pengujian Rangkaian Catu Daya ... 40
4.2.2. Pengujian Pengontrol Waktu ... 40
4.2.3. Pengujian Pogram Pengambilan dan Penggabungan Data Sensor ... 40
4.2.4. Pengujian Komunikasi RFM12-433S 1 Arah ... 42
4.2.5. Pengujian Komunikasi RFM12-433S 2 Arah Bergantian ... 46
4.2.6. Pengujian Pengiriman Paket data ke Central Unit ... 47
4.2.7. Pengujian Pengiriman Data Eeprom... 50
4.3. Pembahasan Perangkat Lunak ... 51
4.3.1. Inisialisai ... 51
4.3.2. Program Utama ... 52
4.3.3. Subrutin Pengambilan Data Semua Sensor ... 53
4.3.4. Subrutin Kendali ... 54
4.3.5. Subrutin PING ... 54
4.3.6. Subrutin Pengiriman Paket Data ... 54
4.3.7. Subrutin Menu ... 54
BAB V KESIMPULAN DAN SARAN ... 56
5.1. Kesimpulan ... 56
5.2. Saran ... 56
DAFTAR PUSTAKA ... 57
xv
DAFTAR GAMBAR
Halaman
Gambar 1.1. Blok Diagram Sistem Telemetri Kualitas Air Kolam Ikan ... 1
Gambar 2.1. Konfigurasi Pin Atmega128 ... 6
Gambar 2.2. Koneksi Master – Slave dengan SPI ... 7
Gambar 2.3. SPI Control Register ... 7
Gambar 2.4. SPI Status Register ... 9
Gambar 2.5. SPI Data Register ... 9
Gambar 2.6. Register TWCR ... 10
Gambar 2.7. Konfigurasi Pin RFM12-433S ... 11
Gambar 2.8. LCD 16x2 ... 12
Gambar 2.9. Bentuk Gelombang Modulasi Digital ... 13
Gambar 2.10. Modulasi FSK ... 14
Gambar 2.11. Demodulasi FSK ... 14
Gambar 2.12. Rangkaian Umum IC DS1307 ... 15
Gambar 2.13. Konfigurasi LED ... 17
Gambar 2.14. Rangkaian Indikator LED ... 18
Gambar 3.1. Blok Diagram Sistem ... 19
Gambar 3.2. Rangkaian RTC IC DS1307 ... 21
Gambar 3.3. Rangkaian LCD 16x2 ... 21
Gambar 3.4. Rangkaian DT-AVR ATmega128 CPU Module ... 22
Gambar 3.5. Rangkaian Keseluruhan Mikrokontroler ... 22
Gambar 3.6. Rangkaian Catu Daya ... 23
Gambar 3.7. Diagram Alir Program Utama ... 25
Gambar 3.8. Diagram Alir Subrutin Menu ... 26
Gambar 3.9. Diagram Alir Subrutin Pengaturan Sistem Kendali... 27
Gambar 3.10. Diagram Alir Subrutin Pengiriman Paket Data ... 28
Gambar 3.11. Diagram Alir Subrutin Pengambilan Data ... 29
Gambar 3.12. Diagram Alir Subrutin Pengambilan Data Semua Sensor ... 30
Gambar 3.13. Diagram Alir Subrutin Ping ... 30
Gambar 3.14. Diagram Alir Subrutin Sistem Kendali... 31
xvi
Gambar 3.16. Diagram Alir Subrutin Matikan Aksi ... 32
Gambar 3.17. Diagram Alir Pengiriman Data RFM12 ... 35
Gambar 3.18. Diagram Alir Penerimaan Data RFM12 ... 36
Gambar 4.1. Kotak Sistem Tampak Atas ... 38
Gambar 4.2. Kotak Sistem Tampak Belakang ... 38
Gambar 4.3. Kotak Sistem Tampak Kiri ... 38
Gambar 4.4. Kotak Sistem Tampak Kanan ... 38
Gambar 4.5. Rangkaian Pengontrol Waktu, Sistem Mikrokontroler, dan LCD ... 39
Gambar 4.6. Rangkaian Pemancar dan Antena ... 39
Gambar 4.7. Rangkaian Catu Daya ... 39
Gambar 4.8. Rangkaian Pengontrol Waktu ... 40
Gambar 4.9. Hasil Pengambilan Paket Data ... 41
Gambar 4.10. Sinyal Diterima Central Unit Untuk Pengiriman 1 byte Dengan Baudrate 1kbps ... 43
Gambar 4.11. Sinyal Diterima Central Unit Untuk Pengiriman 1 byte Dengan Baudrate 2kbps ... 43
Gambar 4.12. Sinyal Diterima Central Unit Untuk Pengiriman 1 byte Dengan Baudrate 5kbps ... 44
Gambar 4.13. Sinyal Diterima Central Unit Dengan Jarak Pengujian 1 Meter ... 44
Gambar 4.14. Sinyal Diterima Central Unit Dengan Jarak Pengujian 10 Meter ... 44
Gambar 4.15. Sinyal Diterima Central Unit Dengan Jarak Pengujian 20 Meter ... 45
Gambar 4.16. Sinyal Diterima Central Unit Dengan Jarak Pengujian 40 Meter ... 45
Gambar 4.17. Cara Membaca Sinyal Yang Diterima ... 46
Gambar 4.18. Sinyal Penerimaan Paket DataDengan Baudrate 1kbps ... 49
Gambar 4.19. Sinyal Penerimaan Paket DataDengan Baudrate 2kbps ... 49
Gambar 4.20. Sinyal Penerimaan Paket Data Dengan Baudrate 5kbps ... 49
Gambar 4.21. Tampilan Data Berhasil Diterima ... 50
Gambar 4.22. Tampilan Program Utama... 53
Gambar 4.23. Tampilan Ketika Tombol OK Ditekan ... 53
Gambar 4.24. Tampilan Ketika Tombol UP Ditekan ... 53
Gambar 4.25. Tampilan Ketika Tombol BACK Ditekan ... 53
xvii
DAFTAR TABEL
Halaman
Tabel 2.1. Hubungan SCK dan Frekuensi Osilator ... 8
Tabel 2.2. Fungsi Pin RFM12-433S ... 11
Tabel 2.3. Konfigurasi Pin LCD M1632 ... 12
Tabel 2.4. Memori Data IC DS1307 ... 16
Tabel 2.5. Pengaturan dan keluaran pin SQW/OUT ... 16
Tabel 2.6. Aksi Pengendalian ... 19
Tabel 3.1. Format Paket Data ... 33
Tabel 3.2. Format Pengaturan Frekuensi ... 33
Tabel 4.1. Contoh Pengambilan Paket Data ... 41
Tabel 4.2. Hasil Pengujian RFM12-433S 1 Arah ... 42
Tabel 4.3. Hasil Pengujian RFM12-433S 2 Arah Bergantian ... 47
Tabel 4.4. Hasil Pengujian Paket Data ... 48
Tabel 4.5. Parameter Pada Memori Eeprom... 52
1
BAB I
PENDAHULUAN
1.1.
Latar Belakang
Konsumsi ikan air tawar di masyarakat semakin meningkat setiap tahun, sehingga permintaan produksi di pasar semakin meningkat juga. Berdasarkan hal tersebut, banyak masyarakat yang mencoba membudidayakan ikan air tawar. Untuk membudidayakan ikan air tawar, kualitas air menjadi faktor yang paling mendukung dalam perkembangan ikan. Banyak ikan yang mati karena kualitas air yang buruk, sehingga produksi ikan pun menjadi menurun dan pengusaha mengalami kerugian yang besar [1].
Berdasarkan hal tersebut, diperlukan sebuah alat yang digunakan untuk monitoring kualitas air kolam ikan. Alat ini terbagi menjadi 3 bagian, yaitu bagian pertama yang terdiri dari kolam ikan, sensor, dan pengendali kualitas air, bagian kedua yang terdiri dari remote unit, dan bagian ketiga yeng terdiri dari central unit seperti ditunjukkan pada gambar 1.1.
Gambar 1.1. Blok Diagram Sistem Telemetri Kualitas Kolam Air Ikan
Pada sistem ini, penulis lebih berkonsentrasi pada bagian remote unit. Banyak penelitian yang sudah membuat sistem untuk memonitoring kualitas kolam air ikan. Salah satu penelitian yang sudah ada dilakukan oleh Charles Wilianto, dalam penelitian berjudul
“Sistem Komunikasi Pengendalian Kualitas Air Kolam Ikan Berbasis ATMega 128”.
sensor dan disatukan menjadi paket data yang kemudian dikirimkan ke central unit
menggunakan kabel untuk kemudian dipisahkan kembali dan ditampilkan dalam bentuk tabel dan grafik. Metode pengiriman paket data masih secara manual dan mengunakan kabel untuk menghubungkan antara remote unit dengan central unit [2].
Dengan menggunakan konsep yang sama tetapi dengan metode yang berbeda, penulis mengubah metode pengiriman paket data secara otomatis dan menggunakan
wireless untuk menghubungkan antara remote unit dengan central unit. Data setiap sensor akan dikumpulkan oleh mikrokontroler dan dirubah menjadi paket data, kemudian paket data tersebut akan dikirimkan ke central unit dengan pemancar secara otomatis. Proses pengambilan data sensor dan pengiriman paket data setiap 60 menit [3]. Pengaturan pengambilan data sensor dan pengiriman paket data bisa dirubah pada pengaturan di
remote unit atau central unit.
Sensor yang terhubung dengan sistem ini untuk mengukur kualitas air kolam ikan seperti tingkat derajat keasaman (pH), kekeruhan, kandungan oksigen (DO), dan temperatur. Sistem ini juga bisa dihubungkan dengan sistem pengendali kualitas air kolam ikan yang meliputi pintu air masuk, pintu air keluar dan pengendali pompa air agar pengguna bisa mengatur kualitas air kolam ikan melalui remote unit atau central unit.
Sistem ini menggunakan modul RFM12-433S untuk transceiver. Dengan sistem ini maka pemilik kolam bisa menjaga kualitas kolam untuk mendapatkan kualitas ikan yang baik. Semua data bisa dilihat melalui monitor di central unit ataupun melalui LCD pada remote unit tanpa harus melihat kepinggir kolam dan mengukurnya sendiri.
1.2.
Tujuan dan Manfaat Penelitian
Tujuan penelitian ini adalah menghasilkan suatu sistem yang dapat mengirimkan data sensor kualitas air kolam ikan secara otomatis dari remote unit ke central unit dengan menggunakan wireless. Manfaat dari penelitian ini adalah mempermudah monitoring
kualitas air kolam ikan.
1.3.
Batasan Masalah
Batasan masalah dalam penelitian ini adalah: a. Menggunakan ATMega 128 sebagai pusat kontrol.
c. Proses pengambilan data di setiap sensor secara bergantian dan menggunakan komunikasi USART.
d. Setiap sensor mengirimkan data dengan diawali karakter khusus yang mewakili sensor tersebut dan diakhiri dengan karakter pagar (#).
e. Menggunakan modul RFM12-433S sebagai pemancar. f. Batas pengujian 5 meter, 10 meter dan 15 meter.
1.4.
Metodologi Penelitian
Metode penulisan yang digunakan adalah:
a. Studi lineatur berupa pengumpulan referensi buku, internet, jurnal, dan artikel. b. Studi kasus terhadap alat yang sudah dibuat sebelumnya. Tahap ini dilakukan untuk
memahami prinsip kerja dari alat yang telah dibuat sebelumnya.
c. Perancangan sistem hardware dan software. Tahap ini bertujuan mencari bentuk model yang optimal dari sistem yang dibuat dengan mempertimbangkan dari berbagai faktor permasalahan dan kebutuhan yang telah ditentukan.
d. Pembuatan sistem hardware dan software. Sistem bekerja apabila, remote unit
mengambil data setiap sensor untuk dijadikan paket data kemudian mengirimkan paket data tersebut ke central unit melalui modul RFM12-433S dan dapat diterima pada central unit.
e. Proses pengambilan data dilakukan dengan bantuan central unit. Central unit
berfungsi untuk mengirim perintah dan menerima paket data pada saat sistem ini berjalan. Data yang dicatat dalam proses pengambilan data ini adalah data yang di dapat setiap sensor menggunakan data dummy, paket data yang ditampilkan pada LCD remote unit, bentuk gelombang output RFM12-433S pada remote unit, bentuk gelombang input RFM12-433S pada central unit, dan tampilan pada LCD central unit.
4
BAB II
DASAR TEORI
2.1.
Kualitas Air Kolam Ikan
Kondisi lingkungan sangat mempengaruhi kualitas air kolam ikan. Banyak faktor yang dapat mempengaruhi kualitas air tersebut, seperti temperatur, keasaman (pH), kekeruhan, dan kandungan oksigen (DO). Semakin baik kondisi air, maka perkembangan lingkungan di dalam air dan sekitar kolam sangat cepat dan baik, tetapi apabila kondisi kualitas air tidak sesuai dapat menghambat pertumbuhan di dalam kolam [4].
2.1.1. Temperatur Air
Suhu rendah dibawah normal dapat menyebabkan ikan kehilangan nafsu makan, dan lebih mudah terkena penyakit. Sebaliknya, jika pada suhu yang terlalu tinggi ikan dapat mengalami gangguan pernapasan dan bisa menyebabkan kerusakan ingsang permanen[4]. Temperatur yang cocok untuk pertumbuhan ikan adalah sekitar 15ºC - 30ºC sedangkan perbedaan temperatur antara siang dan malam harus kurang dari 5ºC.
2.1.2. Keasaman (pH)
Keasaman (pH) merupakan suatu ekspresi dari konsentrasi ion hidrogen (H+) di dalam air. Besarnya dinyatakan dalam minus logaritma dari konsentrasi ion H. Keasaman (pH) sangat penting sebagai parameter kualitas air karena dapat mengontrol tipe dan laju kecepatan reaksi beberapa bahan di dalam air. Besaran pH berkisar dari 0 (sangat asam) sampai dengan 14 (sangat basa/alkalis). Nilai pH kurang dari 7 menunjukkan lingkungan yang asam sedangkan nilai diatas 7 menunjukkan lingkungan yang basa (alkalin). Sedangkan nilai pH samadengan 7 disebut sebagai netral[4].
2.1.3. Kekeruhan
makan. Kekeruhan dapat diukur dengan memasukkan benda yang terang (berwarna putih) sampai kedalaman 40 cm [4]. Apabila benda tersebut masih terlihat, maka kekeruhan air masih belum mengganggu kehidupan ikan.
Satuan yang biasa dipakai dalam kekeruhan ialah Nephelometric Turbidity Units
(NTU). Kekeruhan sering digambarkan dalam satuan Total Suspended Solids (TSS) atau mg/l (miligram per liter). Air murni memiliki NTU kurang dari 1 atau 0 mg/l [5]. Standar kekeruhan air yang baik bagi ikan harus kurang dari 500 NTU [5], bila kekeruhan berada di atas 500 NTU dapat mengganggu pertumbuhan ikan.
2.1.4. Kandungan Oksigen
Oksigen sangat diperlukan untuk pernapasan dan metabolisme ikan di dalam air. Kandungan oksigen yang tidak mencukupi kebutuhan ikan dan biota lainya dapat menyebabkan penurunan daya hidup ikan. Satuan untuk kandungan oksigen adalah part per million (ppm). Kandungan oksigen terlarut dalam air cocok untuk kehidupan dan pertumbuhan ikan gurami sebesar 5ppm, untuk ikan nila lebih dari 3ppm, dan ikan mas berkisar 5 – 7ppm (5 – 7cc /liter air)[4]. Pengaliran air yang baik dan permukaan kolam yang selalu terbuka dapat meningkatkan kadar oksigen dalam air.
2.2.
Mikrokontroler ATmega128
Mikrokontroller ATmega 128 merupakan mikrokontroller keluarga AVR yang mempunyai kapasitas flash memori 128KB. Alf and Vegard’s Risc Processor (AVR) merupakan seri mikrokontroler CMOS 8-bit buatan Atmel, berbasis arsitektur Reduced Instruction Set Computer (RISC). AVR dapat terbagi menjadi 4 kelas, yaitu keluarga ATtiny, keluarga AT90Sxx, keluarga AT-Mega, dan AT86RFxx. Pada dasarnya yang membedakan masing-masing kelas adalah memori dan fungsinya. Dari segi arsitektur dan instruksi yang digunakan, bisa dikatakan hampir sama.
Semua jenis AVR dilengkapi dengan flash memori untuk memori program. Kapasitas dari flash memori ini berbeda antara chip yang satu dengan chip yang lain tergantung dari jenis IC yang digunakan. Untuk flash memori yang paling kecil adalah 1
kbytes (ATtiny11, ATtiny12, dan ATtiny15) dan paling besar adalah 128 kbytes
(ATmega128). Mikrokontroler AVR ATmega128 memiliki spesifikasi sebagai berikut: a. Saluran I/O sebanyak 56 buah, yaitu Port A, Port B, Port C, Port D, Port E, Port F
b. ADC 10 bit sebanyak 8 saluran.
c. 2 buah Timer/Counter 8 bit dan 2 buah Timer/Counter 16 bit. d. Dua buah PWM 8 bit.
e. Watchdog Timer dengan osilator internal. f. Internal SRAM sebesar 4 kbyte.
g. Memori flash sebesar 128 kBytes. h. Interupsi Eksternal.
i. Port antarmuka SPI. j. EEPROM sebesar 4 kbyte. k. Real time counter.
l. 2 buah Port USART untuk komunikasi serial. m. Enam kanal PWM.
n. Tegangan operasi sekitar 4,5 V sampai dengan 5,5V. Gambar 2.1 merupakan gambar konfigurasi pin ATmega128 [6]:
Gambar 2.1. Konfigurasi Pin Atmega128 [6]
2.2.1. Port Input / Output
ATmega128 mempunyai 53 pin I/O yang terbagi menjadi tujuh port dan mampu difungsikan sebagai masukan atau keluaran. Setiap pin I/O mempunyai tiga register yaitu DDRxn, PORTxn dan PINxn yang nilainya tergantung dari aplikasi pin I/O itu sendiri.
Huruf “x” mewakili Port I/O tersebut, sedangkan huruf “n” mewakili nomor pin I/O yang
pin tersebut harus diberi logika tinggi, sedangkan agar berfungsi sebagai masukan, maka DDR pada pin tersebut diberi logika rendah [6].
Saat berfungsi sebagai pin masukan, maka register PINxn digunakan untuk membaca nilai pada pin tersebut. Sedangkan saat berfungsi sebagai sebuah pin keluaran, register PORTxn digunakan untuk mengatur nilai keluaran pin I/O tersebut.
2.2.2. Serial Peripheral Interface (SPI)
Transfer data dengan SPI digunakan antara Master (Microcontroller) dgn slave
(microcontroller atau SPI device seperti MMC card, SPI ADC , dll) dalam jarak dekat dan kecepatan cukup tinggi. Komunikasi serial data antara master dan slave pada SPI diatur melalui 4 buah pin yang terdiri dari SCLK, MOSI, MISO, dan SS , sebagai berikut [6]:
a. SCLK dari master ke slave yang berfungsi sebagai clock.
b. MOSI jalur data dari master dan masuk ke dalam slave.
c. MISO jalur data keluar dari slave dan masuk ke dalam master.
d. SS (slave select) merupakan pin yang berfungsi untuk mengaktifkan slave.
Ada dua maca SPI, yaitu satu master dengan satu slave dan satu master dengan banyak
slave. Pada gambar 2.2 ditunjukkan sambungan antar master dan slave dengan SPI.
Gambar 2.2. Koneksi Master-Slave dengan SPI [6] Register yang berhubungan dengan SPI terdapat seperti gambar 2.3.
Gambar 2.3. SPI Control Register [6]
a. Bit 7 – SPIE: SPI Interrupt Enable. SPIE digunakan untuk mengaktifkan interupsi SPI.
b. Bit-6 SPE (SPI Enable). SPE digunakan untuk mengaktifkan dan menonaktifkan komunikasi SPI dimana jika SPI bernilai 1 maka komunikasi SPI aktif sedangkan jika bernilai 0 maka komunikasi SPI tidak aktif.
c. Bit 5 – DORD: Data Order. DORD digunakan untuk memilih urutan pengiriman data, dari LSB atau MSB terlebih dahulu. Nilai satu untuk LSB dan nilai nol untuk MSB.
d. Bit-4 MSTR (Master or Slave Select). MSTR digunakan untuk mengkonfigurasi sebagai master atau slave secara software dimana jika MSTR bernilai 1 maka terkonfigurasi sebagai master sedangkan MSTR bernilai 0 maka terkonfigurasi sebagai slave. Pengaturan bit MSTR ini tidak akan bisa dilakukan jika pin SS dikonfigurasi sebagai input karena jika pin SS dikonfigurasi sebagai input maka penentuan master atau slavenya otomatis dilakukan secara hardware yaitu dengan membaca level tegangan pada SS.
e. Bit-3 CPOL dan Bit-2 CPHA digunakan untuk pengaturan polaritas dan fasa dari
clock.
f. Bit-1 SPR1/0 (SPI Clock Rate Select) SPR1 dan SPR0 digunakan untuk menentukan kecepatan clock yang digunakan dalam komunikasi SPI.
Tabel 2.1. Hubungan SCK dan Frekuensi Osilator [6]
SPI2x SPR1 SPR0 SCK Frequency
0 0 0 4
0 0 1 16
0 1 0 64
0 1 1 128
1 0 0 2
1 0 1 8
1 1 0 32
Gambar 2.4. SPI Status Register [6]
SPIF (SPI Interrupt Flag) SPIF merupakan bendera yang digunakan untuk mengetahui bahwa proses pengiriman data 1 byte sudah selesai. Jika proses pengiriman data sudah selesai maka SPIF akan bernilai satu (high). SPIF ini berada dalam SPI Status Register
(SPSR).
Gambar 2.5. SPI Data Register [6]
SPI Data Register (SPDR) SPDR merupakan register yang digunakan untuk menyimpan data yang akan dikirim atau diterima pada komunikasi SPI.
2.2.3. – Two-Wire Serial Communication
Two-wire serial communication (TWI) adalah salah satu fitur yang sering dipakai pada aplikasi mikrokontroler. TWI memungkinkan pengguna untuk terhubung dengan 128 perangkat yang berbeda dengan hanya menggunakan dua jalur data, SCL sebagai pengatur
clock dan SDA sebagai jalur utama [6].
Terdapat lima register yang digunakan untuk mengatur penggunaan TWI, yaitu TWI Bit Rate Register (TWBR), TWI Control Register (TWCR), TWI Status Register
(TWSR), TWI Data Register (TWDR), dan TWI (Slave) Address Register (TWAR). Register TWBR digunakan sebagai pengatur bit rate dari komunikasi serial. Nilai TWBR dapat dihitung dari rumus [6]:
(2.1)
Gambar 2.6. Register TWCR [6]
Memberi logika high pada bit TWSTA membuat perangkat menjadi master device
pada jalur data. Perangkat akan mendeteksi keberadaan jalur data, apabila jalur data tersedia, maka perangkat akan menginisialisai kondisi START. Apabila jalur data sedang digunakan oleh perangkat lain, maka perangkat akan menunggu sampai terdeteksi kondisi
STOP kemudian menginisialisasi kondisi START dan mengambil alih jalur data.
Sedangkan bit TWSTA digunakan untuk menginisialisasi kondisi STOP pada jalur data. Apabila perangkat diatur sebagai slave device, maka bit ini dapat digunakan untuk memulihkan kondisi eror. Bit TWEN digunakan untuk mengaktifkan antarmuka TWI, saat TWEN bernilai 1, maka antarmuka TWI akan mengambil alih pin I/O SDA dan SCL dan menggunakannya sebagai jalur data.
2.2.4. EEPROM (Electrical Erasable Programmable Read-Only Memory)
Mikrokontroler Atmega128 mempunyai memori EEPROM sebesar 4 kBytes. Memori ini dapat dibaca dan ditulis melalui program data yang tersimpan tidak akan hilang walaupun mikrokontroler kehilangan catu daya. Alamat memori yang dituju oleh program sebelum membaca atau menulis data pada EEPROM ditunjukkan oleh register EEARH dan
EEARL. Register ini adalah register 11-bit yang menyimpan alamat EEPROM dari alamat 0 sampai dengan alamat 4095 [6]. Register EEDR digunakan untuk membaca dan menulis pada alamat yang dituju oleh register EEAR.
2.3.
RFM12-433S
RFM12 dengan pita frekuensi 433 MHz dapat menggunakan frekuensi antara 430,24 MHz – 439,7575 MHz [7]. Karena modul ini merupakan transceiver maka modul ini bisa dioperasikan menjadi transmitter maupun sebagai receiver. Koneksi pin RFM12-433S dapat dilihat pada gambar 2.7 dan fungsi setiap pin yang digunakan dapat dilihat pada tabel 2.2. RFM12-433S memiliki spesifikasi, diantaranya sebagai berikut [7]:
a. Harganya relatif murah
b. Menggunakan teknologi PLL
d. Differential antenna
e. Tuning antena otomatis dilakukan oleh modul
f. Deviasi frekuensi TX dapat diatur
g. Bandwidth dapat diatur
h. AFC dan DQD
i. Internal data fltering
j. Dapat menggunakan pola sinkronisasi pada modul penerima
k. Antarmuka SPI
Tabel 2.2. Fungsi Pin RFM12-433S [7]
Definisi Tipe Fungsi
nINT/VDI DI/ DO Input interupsi (aktif rendah) / indikator data benar
VDD S Positif power supply
SDI DI SPI data input
SCK DI SPI clock input
nSel DI Chip select (aktif rendah)
SDO DO Serial data output dengan bus
nIRQ DO Intereups request output (aktif rendah)
FSK/DATA/Nffs DI/DO/DI Transmit FSK data input/ Received data output (FIFO
not used)/ FIFO select
DCLK/CFIL/FFIT DO/AIO/DO
Clock output (no FIFO )/ external filter capacitor(analog mode)/ FIFO
interrupts(active high)when FIFO level set to 1, FIFO empty interruption can
be achieved
CLK DO Clock output for external microcontroler
z DIO Reset output (active low)
[image:30.595.95.509.89.739.2]GND S Power ground
2.4.
LCD 16x2
[image:31.595.94.514.301.715.2]LCD (liquid cell display) merupakan salah satu alat komponen elektronika yang berfungsi untuk menampilkan data berupa karakter [8]. LCD yang digunakan adalah tipe M1632 yang ditunjukkan pada Gambar 2.8.
Gambar 2.8. LCD 16x2 [8]
LCD tipe ini memiliki 2 baris dimana masing-masing baris memuat 16 karakter. Selain sangat mudah dioperasikan, kebutuhan daya LCD ini sangat rendah[8]. Konfigurasi pin LCDM1632 dapat dilihat pada Tabel 2.3.
Tabel 2.3. Konfigurasi Pin LCD M1632 [8]
No. Nama Fungsi
1 Vss 0V (GND)
2 Vcc 5V
3 VLC LCD Contrast Voltage
4 RS Register Select; H: Data Input; L: Instruction Input
5 RD H: Read; L: Write
6 EN Enable Signal
7 D0 Data Bus
8 D1 Data Bus
9 D2 Data Bus
10 D3 Data Bus
11 D4 Data Bus
12 D5 Data Bus
13 D6 Data Bus
14 D7 Data Bus
15 V+BL Positif backlight voltage (4-4,2V; 50-200mA)
2.5.
Modulasi Digital
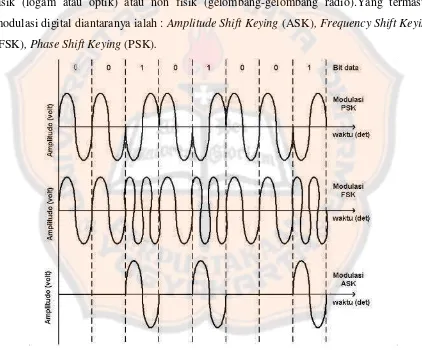
Modulasi merupakan proses penumpangan sinyal masukan ke dalam sinyal carrier. Modulasi digital adalah proses mengubah-ubah karakteristik dan sifat gelombang pembawa (carrier) yang sedemikian rupa sehingga bentuk hasilnya memiliki ciri-ciri dari bit-bit (0 atau 1) yang dikandungnya, proses ini dinamakan Modulasi Carrier. Sehingga dengan mengamati modulasi carriernya kita dapat mengetahui urutan bit-bit yang ditumpangkan pada carrier.
Melalui proses modulasi digital, sinyal-sinyal digital pada setiap tingkatan dapat dikirim ke penerima dengan baik. Untuk pengiriman ini dapat digunakan media transmisi fisik (logam atau optik) atau non fisik (gelombang-gelombang radio).Yang termasuk modulasi digital diantaranya ialah : Amplitude Shift Keying (ASK), Frequency Shift Keying
[image:32.595.91.513.265.615.2](FSK), Phase Shift Keying (PSK).
Gambar 2.9. Bentuk Gelombang Modulasi Digital
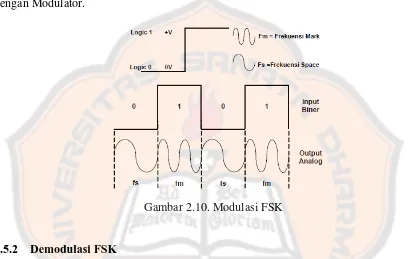
2.5.1 Modulasi FSK
frekuensi yang berbeda.
Modulasi FSK hanya 2 kemungkinan, yaitu More atau Less (High atau Low, Mark
[image:33.595.91.502.199.458.2]atau Space). Teknik modulasi FSK banyak digunakan untuk informasi pengiriman jarak jauh atu teletype. Standar FSK untuk teletype sudah dikembangkan selama bertahun-tahun, yaitu untuk frekuensi 1070 Hz merepresentasikan mark atau 1, dan 1270 Hz merepresentasikan space atau 0. Rangkaian yang digunakan untuk proses modulasi disebut dengan Modulator.
Gambar 2.10. Modulasi FSK
2.5.2 Demodulasi FSK
Konsep dasar Demodulasi adalah proses pemisahan sinyal antara sinyal pembawa
(Carrier) dengan sinyal data yang dikirim oleh suatu pemancar. Untuk melakukan proses demodulasi ini, maka dibutuhkan Suatu rangkaian yang disebut Demodulator. Demodulator ini berada pada sisi penerima untuk melakukan proses pemisahan sinyal tersebut, sehingga data yang diterima dapat sesuai dengan data yang dikirim sebelumnya.
[image:33.595.90.516.461.718.2]2.6.
IC DS1307
–
Real Time Clock (RTC)
[image:34.595.94.502.195.435.2]IC DS1307 adalah sebuah IC RTC yang dapat digunakan untuk menyimpan waktu. Perangkat ini mampu menyimpan data waktu, mulai dari detik, menit, jam, hari, hingga tanggal, bulan, dan tahun. IC DS1307 bekerja dengan menggunakan komunikasi serial . Ketika catu utama tidak aktif, maka IC ini secara otomatis akan berpindah ke catuan dari baterai 3,2 V.
Gambar 2.12. Rangkaian umum dari IC DS1307 [9]
Semua data yang diterima dari IC DS1307 sudah berupa data Binary Coded decimal (BCD). Pertukaran data menggunakan antarmuka , yang setiap memulai pertukaran data, master device harus mengisialisai keadaan START dan diakhiri dengan keadaan STOP. Keadaan START terjadi apabila pin SDA berubah dari logika satu ke logika nol saat pin SCL berada pada logika satu. Sedangkan keadaan STOP terjadi saat pin SDA berubah dari logika nol ke logika satu saan pin SCL berada pada logika satu. Sedangkan pertukaran data terjadi pada saat pin SCL berada pada logika nol.
Memori IC DS1307 terdiri dari dua register utama, yaitu Timekeeper Register dan
Control Register. Timekeeper Register berisi data-data pewaktuan, mulai dari detik, menit, jam, tanggal, bulan, tahun hingga hari. Sedangkan Control Register berisi bit untuk mengatur keluaran pin SQW/OUT. Saat Square Wave Output tidak aktif, bila bit Out
bernilai satu, maka keluaran pin SQW/OUT juga bernilai satu, sedangkan apabila bit Out
Tabel 2.4. Memori pada IC DS1307 [9]
Tabel 2.5. Pengaturan dan keluaran pin SQW/OUT [9]
2.7.
Catu daya
Catu daya adalah sebuah piranti elektronika yang berfungsi sebagai penyearah arus AC menjadi DC untuk memberikan sumber daya untuk piranti lain. Rangkaian catu daya bisa disusun dari transformator, penyearah, dan sebuah IC regulator tegangan.
Tegangan AC dari jala-jala PLN diturunkan nilainya oleh transformator step down, kemudian disearahkan dengan diode brige. Keluaran diode brige diratakan dengan rangkaian filter untuk memperkecil tegangan ripple. Kemudian digunakan regulator tegangan untuk menstabilkan tegangan yang keluar [10].
Alamat Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0 Fungsi Rentang
00h CH 10 detik detik Detik 00-59
01h 0 10 menit menit Menit 00-59
02h 12 10
jam 10 jam jam Jam
1-12 +AM/PM
00-23
02h 24 AM
/ PM 10 jam jam Jam
1-12 +AM/PM
00-23
03h 0 0 0 0 0 hari Hari 01-07
04h 0 0 10 tanggal tanggal Tanggal 01-31
05h 10
bulan bulan Bulan 01-12
06h 10 tahun tahun Tahun 00-99
07h Out 0 0 SQWE 0 0 RS1 RS0 Kontrol -
08h-3Fh RAM
56x8 00h-FFh
RS1 RS0 Frekuensi
SQW/OUT
SQWE OUT
0 0 1 Hz 1 X
0 1 4096 Hz 1 X
1 0 8,192 kHz 1 X
1 1 32,768 kHz 1 X
X X 0 0 0
Filter dalam rangkaian penyearah digunakan untuk memperkecil tegangan ripple, sehingga dapat diperoleh tegangan keluaran yang lebih rata, dengan memanfaatkan proses pengisian dan pengosongan muatan kapasitor [10]. Harga kapasitansi kapasitor ditentukan dengan persamaan berikut :
√ √ (2.2)
Vr(p - p) = Vm – VDCmin (2.3)
Dengan IDC adalah arus maksimal penyearah (ampere), C adalah kapasitor yang digunakan sebagai filter (Farad). VM adalah tegangan arus bolak balik, Vr(PP) tegangan
ripple puncak ke puncak dan Vr(rms) adalah tegangan ripple efektif. VDC MIN adalah tegangan minimal yang dibutuhkan oleh IC regulator.
2.8.
LED (Light - Emitting Diode)
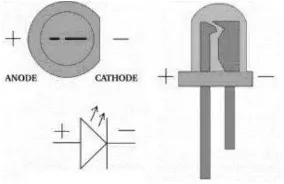
LED adalah komponen elektronika yang terbuat dari bahan semi konduktor jenis dioda yang mampu memancarkan cahaya. LED mampu menghasilkan cahaya yang berbeda menurut semi konduktor yang digunakan dan jenis bahan semi konduktor tersebut akan menghasilkan panjang gelombang yang berbeda sehingga cahaya yang dihasilkan berbeda pula. LED adalah salah satu jenis dioda, maka LED memiliki 2 kutub yaitu anoda dan katoda. Dalam hal ini LED akan menyala bila ada arus listrik mengalir dari anoda menuju katoda.
[image:36.595.234.376.625.717.2]Pemasangan kutub LED tidak boleh terbalik karena apabila terbalik kutubnya maka LED tersebut tidak akan menyala. LED memiliki karakteristik berbeda-beda menurut warna yang dihasilkan. Semakin tinggi arus yang mengalir pada LED maka semakin terang pula cahaya yang dihasilkan, namun perlu diperhatikan bahwa arus yang diperbolehkan 10mA-20mA dan pada tegangan 1,6V-3,5V menurut karakter warna yang dihasilkan. Apabila arus yang mengalir lebih dari 20mA, maka LED akan terbakar. Untuk menjaga agar LED tidak terbakar perlu digunakan resistor sebagai penghambat arus. LED ditunjukkan pada gambar 2.13.
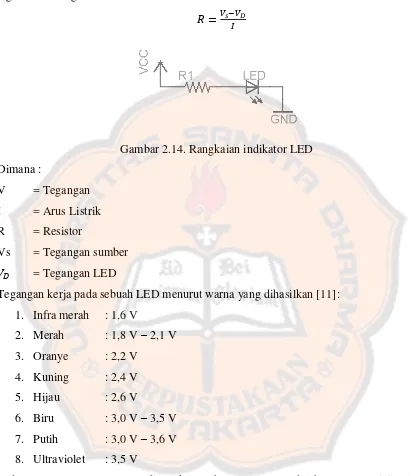
Berdasarkan gambar 2.14, persamaan untuk mencari nilai tegangan menggunakan hokum ohm adalah V = I.R, sehingga persamaan untuk mencari nilai resistor yang digunakan sebagai indikator adalah :
[image:37.595.88.497.124.600.2](2.4)
Gambar 2.14. Rangkaian indikator LED Dimana :
V = Tegangan I = Arus Listrik R = Resistor
Vs = Tegangan sumber = Tegangan LED
Tegangan kerja pada sebuah LED menurut warna yang dihasilkan [11]: 1. Infra merah : 1,6 V
2. Merah : 1,8 V – 2,1 V 3. Oranye : 2,2 V
4. Kuning : 2,4 V 5. Hijau : 2,6 V
6. Biru : 3,0 V – 3,5 V 7. Putih : 3,0 V – 3,6 V 8. Ultraviolet : 3,5 V
Pada umumnya tegangan yang digunakan pada perancangan adalah tegangan minimal LED ( ), tegangan minimal LED adalah sebesar 1,5 V.
2.9.
Sistem Pengendali Air Kolam
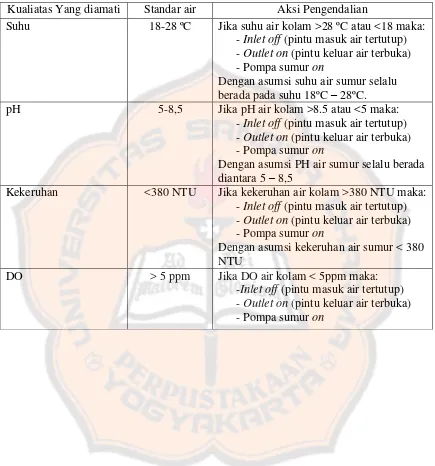
sistem dapat digunakan untuk semua jenis ikan seperti pada tabel 2.6. Pada tabel tersebut juga ditentukan aksi pengendalian berdasarkan standar yang ditentukan [12];
Tabel 2.6. Aksi Pengendalian
Kualiatas Yang diamati Standar air Aksi Pengendalian
Suhu 18-28 ºC Jika suhu air kolam >28 ºC atau <18 maka: - Inlet off (pintu masuk air tertutup) - Outlet on (pintu keluar air terbuka) - Pompa sumur on
Dengan asumsi suhu air sumur selalu berada pada suhu 18ºC – 28ºC. pH 5-8,5 Jika pH air kolam >8.5 atau <5 maka:
- Inlet off (pintu masuk air tertutup) - Outlet on (pintu keluar air terbuka) - Pompa sumur on
Dengan asumsi PH air sumur selalu berada diantara 5 – 8,5
Kekeruhan <380 NTU Jika kekeruhan air kolam >380 NTU maka: - Inlet off (pintu masuk air tertutup) - Outlet on (pintu keluar air terbuka) - Pompa sumur on
Dengan asumsi kekeruhan air sumur < 380 NTU
DO > 5 ppm Jika DO air kolam < 5ppm maka:
19
BAB III
RANCANGAN PENELITIAN
Perancangan sistem telemetri kualitas kolam air ikan ini dibagi menjadi menjadi dua bagian utama, yaitu:
1. Perancangan hardware yang terdiri dari mikrokontroler dan perangkat pendukung seperti, IC RTC DS1307, power supply dan rangkaian LCD. Gambar 3.1 menunjukkan blok diagram sistem yang akan dibuat.
2. Perancangan software yang terdiri dari pemograman utama, dan subrutin-subrutinnya seperti subrutin menu dan subrutin pengambilan data sensor dan subrutin pengiriman paket data.
Gambar 3.1. Blok Diagram Sistem
Berikut merupakan keterangan cara kerja sistem yang ditunjukkan gambar 3.1:
1. Pengambilan data setiap sensor dilakukan dengan menggunakan prosedur USART secara bergantian. Data sensor yang diambil adalah sensor temperatur, sensor keasaman, sensor kekeruhan, dan sensor kandungan oksigen Data tersebut kemudian diolah oleh mikrokontroler untuk dijadikan sebuah paket data yang siap untuk dikirim kembali ke sistem lain menggunakan modul RFM12-433S.
setiap sistem kendali. Status tersebut ditampilkan pada LCD pada menu utama dengan simbol “I” untuk pintu air masuk, “O” untuk pintu air keluar dan “P” untuk pompa air.
3. Tombol push-bottom berfungsi untuk memberikan masukan berupa pengaturan dari pengguna. Pengaturan ini memungkinkan pengguna untuk mengubah konfigurasi dan mode – mode pengendalian yang dilakukan sistem.
4. IC RTC DS1307 digunakan sebagai penjaga waktu mikrokontroler, sehingga pengiriman paket data bisa disesuaikan sesuai keinginan pengguna.
5. RFM12-433S berfungsi sebagai transmitter yang digunakan untuk menerima data dari central unit untuk menjalankan sistem dan mengirimkan paket data ke sistem
central unit melalui wireless.
6. Secara keseluruhan, pertama mikrokontroler akan mengambil data dari setiap sensor yang kemudian di tampilkan di LCD sekaligus dirubah menjadi paket data yang siap untuk dikirim ke central unit. Ketika waktu sesuai dengan jadwal pengiriman paket data, maka transmitter difungsikan sebagai pengirim kemudian mengirim paket data ke central unit setelah data dikirim transmitter difungsikan kembali menjadi penerima, kemudian mikrokontroler menngontrol sistem pengendalian kualitas air kolam dari data yang sudah didapat.
3.1.
Perancangan Perangkat Keras
3.1.1. Rangkaian RTC – IC DS1307
Berdasarkan datasheet , IC DS1307 terdapat rangkaian standar untuk menggunakan IC ini. Untuk dapat bekerja dengan baik, maka pada jalur data dan sumber clock
Gambar 3.2. Rangakaian RTC IC DS1307
3.1.2. Rangkaian LCD
LCD yang digunakan pada perancangan ini adalah LCD character 16x2 yang berfungsi untuk menampilkan data setiap sensor. Berdasarkan datasheet tegangan kontras (pin Vo) maksimum LCD ini adalah 5 volt, sehingga digunakan sebuah variable resistor
sebesar 10 kOhm yang digunakan untuk mebatasi tegangan pada pin ini. Rangkaian LCD
character 16x2 ditunjukkan pada gambar 3.3.
Gambar 3.3. Rangkain LCD 16x2
3.1.3. Rangkaian DT-AVR ATMEGA 128 CPU Module
Dalam perancangan sistem telemetri ini, penulis menggunakan DT-AVR ATMEGA 128 CPU Module sebagai minimum sistem. DT-AVR ATMEGA 128 CPU
Gambar 3.4. Rangkaian DT-AVR ATMEGA 128 CPU Module [13]
3.1.4. Rangkaian Catu Daya
Rangkaian ini dibutuhkan untuk memberikan sumber tegangan ke mikrokontroler, LCD 16x2, dan piranti lainnya yang digunakan dalam sistem telemetri kualitas air kolam ikan ini. Sehingga rangkaian ini akan terus beroperasi selama sistem dijalankan. Sebelum di distribusikan ke piranti lainnya, tegangan keluaran dari catu daya ini harus disesuaikan dengan piranti lainnya.
Karena piranti yang akan didistribusikan hanya memerlukan tegangan 5v, maka akan dirancang sebuah catu daya 5v. rangkaian catu daya 5v ditunjukkan pada gambar 3.6.
Gambar 3.6. Rangkaian Catu Daya
Gambar 3.6. merupakan rangkaian regulator tegangan yang menggunakan komponen 7805 yang dapat meregulasi tegangan output. Berdasarkan datasheet, komponen 7805 memiliki arus output atau Io sebesar 500mA. Nilai kapasitor C2 sesuai dengan datasheet 7805 agar tegangan output lebih stabil. Perhitungan nilai kapasitor C1 untuk penyearah 5VDC, dilakukan seperti persamaan 2.3 dengan nilai tegangan output
trafo diketahui sebesar 12VAC (VM), arus maksimal yang diinginkan sebesar 1A dan tegangan input minimal IC regulator sebesar 7,5VDC (VMIN), sehingga diperoleh nilai minimal kapasitor C1 sebagai berikut :
( √ )
√
√
√
Pada perhitungan nilai minimal C1 diperoleh sebesar 1239μF, nilai tersebut tidak terdapat di pasaran sehingga digunakan nilai kapasitor C1 sebesar 2200μF yang mendekati nilai perhitungan dan terdapat di pasaran. Pemilihan nilai C1 sebesar 2200μF berdampak memperkecil ripple.
Untuk indikator power digunakan dua buah LED berwarna merah untuk indikator 12 volt dan warna hijau untuk indikator 5 volt. Untuk menyalakan kedua LED ini dibutuhkan tegangan sebesar 1,5 volt dengan arus minimal 10mA, sehingga dibutuhkan sebuah resistor untuk menurunkan tegangan input tersebut dan digunakan rumus pembagi tegangan, maka didapat hasilnya seperti berikut:
dari persamaan di atas didapat R1 sebesar 1k dan R2 sebesar 330 .
3.2.
Perancangan Perangkat Lunak
3.2.1. Diagram Alir Program Utama
Diagram alir program utama ditunjukkan pada gambar 3.7. diagram alir tersebut menunjukkan proses sistem ini secara keseluruhan. Mulai dari program melakukan inisialisasi I/O dan fitur – fitur yang digunakan. Proses pengambilan data setiap sensor akan dilakukan sebelum proses pengiriman data. Pengiriman paket data dilakukan setiap 1 jam, tetapi pengguna bisa merubah pengaturan pengiriman data pada menu. Setelah mengambil data, mikro memeriksa setiap data dan membandingkannya dengan standar kualitas air yang sudah ditentukan pada BAB II untuk mengendalikan sistem kendali. Sebelum melakukan pengiriman paket data, remote unit akan mengirimkan “ping” untuk
Gambar 3.7. Diagram Alir Program Utama
3.2.2. Diagram Alir Subrutin Menu
Dari diagram alir subrutin menu , pengguna dapat langsung merubah waktu sistem, mengubah pengaturan waktu pengiriman paket data ke central unit, pengecekan data setiap sensor, pengaturan frekuensi, kecepatan transfer paket data, perubahan pengaturan sistem kendali dan pengecekan koneksi wireless ke central unit. Untuk melakukan pengaturan tersebut, pengguna hanya perlu menekan tombol “menu” pada kotak sistem bagian atas dan melihat hasilnya pada LCD.
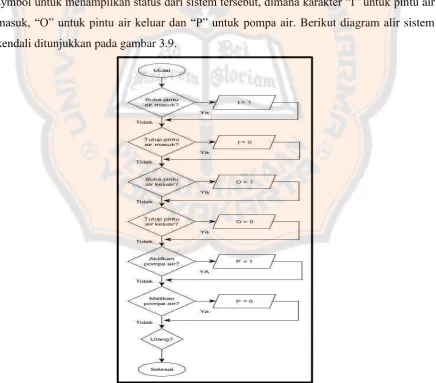
3.2.3. Diagram Alir Subrutin Pengaturan Sistem Kendali
[image:47.595.89.526.342.725.2]Di dalam subrutin menu, pengguna dapat mengatur sistem kendali, tetapi sistem pengendali dilakukan secara manual dan sistem hanya memberikan tegangan output yang kemudian diteruskan ke driver sistem kendali. Sistem kendali dibagi menjadi 3 bagian, yaitu pintu air masuk, pintu air keluar dan pompa air. Setiap bagian dilengkapi dengan symbol untuk menampilkan status dari sistem tersebut, dimana karakter “I” untuk pintu air masuk, “O” untuk pintu air keluar dan “P” untuk pompa air. Berikut diagram alir sistem kendali ditunjukkan pada gambar 3.9.
3.2.4. Diagram Alir Subrutin Pengiriman Paket Data
Pengiriman paket data diawali dengan karakter “@” dan diakhiri karakter “$” sesuai dengan kesepakatan dengan central unit. Setelah 1 paket data selesai dikirimkan,
central unit memeriksa paket data yang diterima dengan mencocokkan karakter pertama, karakter terakhir dan jumlah karakter yang diterima. Jika sesuai central unit mengirimkan karakter “y” yang berarti paket data berhasil diterima, tetapi jika tidak sesuai central unit
tidak akan mengirimkan jawaban apapun dan paket data yang dikirimkan tersebut disimpan di eeprom untuk dikirimkan pada jadwal pengiriman paket data selanjutnya jika komunikasi dengan central unit terhubung kembali.
[image:48.595.96.493.311.737.2]Setelah 1 paket data selesai dikirim, remote unit memeriksa apabila ada paket data yang belum dikirimkan atau tidak, jika ada remote unit mengirimkan kembali paket data yang belum dikirim tersebut mulai dari prosedur pengiriman paket data yang pertama. Berikut diagram alir pengiriman paket data ditunjukkan pada gambar 3.10.
3.2.5. Diagram Alir Subrutin Pengambilan Data Sensor
Pengambilan data sensor dilakukan dengan mengirimkan karakter perintah ke slave yang mewakili sensor. Karakter perintah untuk mengambil data sensor suhu adalah “a”, sensor keasaman adalah “b”, sensor kekeruhan adalah “c” dan sensor kandungan oksigen adalah “d”. Format data setiap 1 sensor yang dikirim sebanyak 6 karakter. Format data yang dikirim dari slave sebagai berikut: “S0015#”. Karakter pertama mewakili inisial sensor, karakter ke 2 sampai ke 5 adalah data sensor yang dikirimkan, dan karakter ke-6 adalah karakter pagar “#”. Sensor termperatur diwakili dengan karakter “S”, sensor keasaman diwakili dengan karakter “K”, sensor kekeruhan diwakili dengan karakter “H”, dan sensor DO diwakili dengan karakter “D.
[image:49.595.86.525.363.723.2]Remote unit akan memeriksa data yang diterima dengan mengecek karater pertama, karakter terakhir, dan jumlah karakter yang diterima, jika data tidak sesuai dengan format tersebut maka data dianggap salah dan pengambilan data diulangi lagi. Pengambilan data maksimal sebanyak 3 kali, apabila data sudah diminta sebanyak 3 kali dan data masih belum sesuai format data yang ditampilkan adalah 0000. Berikut diagram alir subrutin pengambilan data sensor ditunjukkan gambar 3.11, sedangkan subrutin pengambilan data setiap sensor ditunjukkan pada gambar 3.12.
Gambar 3.12. Diagram Alir Subrutin Pengambilan Data Semua Sensor.
3.2.6. Diagram Alir Subrutin Ping
Berikut diagram alirnya ditunjukkan pada gambar 3.13.
Diagram ini berfungsi untuk mememeriksa sambungan wireless dengan central unit. Remote unit mengirimkan karakter “p” ke central unit untuk perintah “ping”, jika
terhubung central unit memberikan jawaban berupa karakter “y”.
3.2.7. Diagram Alir Subrutin Kendali
[image:51.595.97.495.232.697.2]Pada subrutin ini, data monitoring sibandingkan dengan standar yang telah ditentukan (lihat tabel 2.6). hasil perbandingan menentukan aksi pengendalian. Gambar 3.14 merupakan diagram alir program kontrol sistem.
Gambar 3.15. Diagram Alir Subrutin Aksi
3.2.8. Format Paket Data
Jumlah karakter di dalam paket data sebanyak 46 karakter, terdiri dari nomor penyimpanan, tanggal, jam, penggabungan 4 data sensor, yang diawali dengan karakter “@” dan diakhiri dengan karakter ”$”. Format data tersebut disesuaikan dengan kebutuhan dan sesuai dengan yang dibutuhkan oleh central unit, berikut format data di dalam paket data:
@01#dd-MM-yyyy#HH:mm#Saaaa#Kbbbb#Hcccc#Ddddd#$ Dari format paket data tersebut bisa dijelaskan pada tabel 3.1 seperti berikut:
Tabel 3.1. Format Paket Data
Nomor
penyimpanan Tanggal Waktu Suhu Keasaman Kekeruhan DO
Jumlah
karakter 2 10 5 5 5 5 5
Paket data yang disimpan di dalam eeprom memiliki kapasitas 50 kbyte setiap 1 paket data, hal ini bertujuan untuk mempermudah untuk memberikan alamat setiap paket data yang disimpan di dalam eeprom. Jumlah memori eeprom Atmega 128 adalah 4 kbyte. Memori eeprom juga digunakan untuk menyimpan pengaturan lainnya sehingga array yang disediakan untuk penyimpanan paket data sebanyak 4000 karakter, jadi apabila pengaturan pengambilan data diatur selama 1 jam, paket data yang mampu disimpan sebanyak 80 kali pengambilan data atau selama 3 hari 8 jam, dihitung dari:
3.2.9. Pengaturan Frekuensi Kerja RFM12
Pengaturan frekuensi kerja RFM12 (baik pancar maupun terima) menggunakan perintah “Frequency Setting Command”. Instruksi ini memiliki format :
Tabel 3.2. Format Pengaturan Frekuensi [7]
Bit 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 Data 1 0 1 0 F, menyatakan frekuensi
MHz (3.1)
Frekuensi yang akan digunakan adalah 432 MHz, dari persamaan 3.1. dapat dihitung untuk mencari nilai F seperti berikut:
( )
Nilai F yang didapat dirubah ke dalam bentuk heksadesimal menjadi:
Nilai heksadesimal yang didapat dimasukkan ke dalam register “Frequency Setting Command” untuk mengatur frekuensi yang digunakan.
3.2.10.Prosedur Pengiriman Data dengan RFM12
Prosedur pengiriman data melibatkan instruksi “Power Management Command”
dan “Transmitter Register Write Command”. “Power Management Command” berfungsi menghidupkan dan mematikan komponen – komponen pemancar RF pada RFM12. ”Transmitter Register Write Command” berfungsi mengirimkan satu byte data ke register
data pemancar pada RFM12.
Prosedur pengiriman data dimulai dengan menghidupkan bagian pemancar menggunakan instruksi “Power Management Command” dengan nilai 0x8238. Instruksi dengan nilai tersebut akan menghidupkan penguat daya RF (Radio Frequency), synthesizer
dan osilator. Selanjutnya, lima paket data pembuka dikirim secara urut : 0xB8AA, 0xB8AA, 0xB8AA, 0xB82D dan 0xB8D4. Kemudian satu byte data dikirim menggunakan perintah “Transmitter Register Write Command” yaitu dengan melakukan operasi OR antara bilangan heksadesimal 0xB800 dengan data yang bersangkutan.
Gambar 3.17. Diagram Alir Pengiriman Data RFM12
3.2.11.Prosedur Penerimaan Data dengan RFM12
Prosedur penerimaan data melibatkan tiga instruksi. “Power Management
Command” berfungsi menghidupkan dan mematikan komponen – komponen penerima RF dari RFM12. “FIFO dan Reset Mode Command' berfungsi mengatur pemakaian register data FIFO. “Receiver FIFO Read Command” berfungsi menerima satu byte data yang ditampung pada register FIFO.
Prosedur penerimaan data dimulai dengan menghidupkan komponen – komponen penerima meliputi RF front end, baseband, synthesizer dan osilator. Hal ini dilakukan menggunakan instruksi 'Power Management Command' dengan nilai 0x82C8. Mode FIFO diatur dan FIFO diaktifkan menggunakan perintah 'FIFO and Reset Mode Command'
dengan nilai 0xCA81 dan 0xCA83. Pengambilan data dilakukan pada register FIFO menggunakan instruksi “Receiver FIFO Read Command”. Hal ini dilakukan dengan mengirimkan nilai 0xB000 dan menampung data kembalian dari RFM12.
Power Management Command' dengan nilai 0x8208. Diagram alir prosedur penerimaan data tampak pada Gambar 3.18.
Gambar 3.18. Diagram Alir Penerimaan Data RFM12
3.2.12.Data Dummy
Data dummy adalah data yang menyerupai data aslinya tetapi tidak memiliki fungsi aslinya. Data ini akan digunakan untuk menggantikan data setiap sensor dalam pengujian dan pengambilan data. Data yang digunakan disimpan pada eeprom setiap mikro untuk menggantikan sensor. Sensor suhu untuk kualitas kolam batas pengukurannya adalah 15ºC - 39ºC dengan perbedaan data setiap 1,5ºC, untuk sensor keasaman batas pengukurannya adalah 4 pH – 10,5 pH dengan perbedaan data setiap 0,5 pH, sensor kekeruhan memiliki batas pengukuran sebesar 25 NTU – 475 NTU dengan perbedaan data sebesar 25 NTU, dan sensor DO memiliki batas pengukuran 3 ppm – 9,5 ppm dengan perbedaan data setiap 0,5 ppm [2]. Setiap sensor memiliki waktu pengukuran yang berbeda. Sensor kekeruhan, dan keasaman waktu yang dibutuhkan untuk mendapatkan data yang valid selama 5 setik [14]. Untuk sensor kadar oksigen waktu yang dibutuhkan untuk mendapatkan data yang
valid sekitar 20 menit [15].
jumlah data yang berbeda. Mikro yang mewakili sensor suhu memiliki 17 data dari 15ºC - 39ºC dengan perbedaan data setiap 1,5º, untuk mikro yang mewakili sensor keasaman memiliki 14 data dari 4 pH – 10,5 pH dengan perbedaan data setiap 0,5 pH, sedangkan mikro yang mewakili sensor kekeruhan mimiliki 19 data dari 25 NTU – 475 NTU dengan perbedaan data sebesar 25 NTU, dan untuk mikro yang mewakili sensor DO memiliki 14 data dari 3 ppm – 9,5 ppm dengan perbedaan data setiap 0,5 ppm.
38
BAB IV
HASIL DAN PEMBAHASAN
Bab ini berisi gambar fisik hardware yang dibuat, pembahasan tentang perbagian
hardware, hasil pengujian rangkaian, hasil pengambilan data, pembahasan tentang data yang diperoleh, dan pembahasan tentang program yang digunakan di mikrokontroler. Data yang akan dibahas terdiri dari data hasil pengambilan data sensor dan pengiriman paket data ke cental unit. Hasil pengujian berupa data-data yang diperoleh dapat memperlihatkan bahwa hardware atau software yang dirancang telah bekerja dengan baik atau tidak. Berdasarkan data-data tersebut dapat dilakukan analisis terhadap proses kerja alat yang kemudian dapat digunakan untuk menarik kesimpulan akhir.
4.1.
Bentuk Fisik Remote Unit dan Hardware Elektronik
4.1.1. Bentuk Fisik Remote Unit
Bentuk fisik remote unit secara keseluruhan ditunjukkan pada gambar 4.1 sampai gambar 4.4. Bentuk fisik remote unit ini terdiri dari 1 box yang bertujuan untuk melindungi dan merapikan rangkaian elektronik di dalamnya.
Gambar 4.1. Kotak Sistem Tampak Atas Gambar 4.2. Kotak Sistem Tampak Belakang
[image:58.595.82.528.164.746.2]
4.1.2. Subsistem Elektonik Alat
Subsistem elektronik alat terdiri atas rangkaian pengontrol waktu, rangkaian sistem mikrokontroler, LCD karakter, rangkaian tombol, indikator sistem kendali, rangkaian pemancar, rangkaian antena, dan catu daya. Penulis membuat rangkaian sistem mikrokontroler, LCD karakter, dan pengontrol waktu dalam 1 PCB, rangkaian tersebut bisa dilihat pada gambar 4.5, sedangkan untuk rangkaian pemancar, rangkaian antena, dan catu daya ditampilkan pada gambar 4.6 dan gambar 4.7.
Gambar 4.5. Rangkaian Pengontrol Waktu, Sistem Mikrokontroler, dan LCD karakter
[image:59.595.95.514.208.738.2]Gambar 4.6. Rangkaian Pemancar dan Antena
4.2.
Pengujian Alat
4.2.1. Pengujian Rangkaian Catu Daya
Pengujian rangkaian catu daya ini bertujuan mengetahui tegangan keluaran yang dihasilkan dan menguji kemampuan catu daya sudah bekerja dengan baik atau tidak. Pengujian dilakukan dengan mengukur tegangan keluaran pada pin keluaran IC LM7805 dan dibandingkan dengan nilai tegangan pada datasheet.
Pada pengujian rangkaian catu daya mendapatkan tegangan keluaran sebesar 4,93 volt, sedangkan keluaran dari IC LM7805 pada datasheet sebesar 4,75-5,25 volt. Pengujian
![Gambar 2.7. Konfigurasi Pin RFM12-433S [7]](https://thumb-ap.123doks.com/thumbv2/123dok/829864.606352/30.595.95.509.89.739/gambar-konfigurasi-pin-rfm-s.webp)
![Gambar 2.8. LCD 16x2 [8]](https://thumb-ap.123doks.com/thumbv2/123dok/829864.606352/31.595.94.514.301.715/gambar-lcd-x.webp)
![Gambar 2.12. Rangkaian umum dari IC DS1307 [9]](https://thumb-ap.123doks.com/thumbv2/123dok/829864.606352/34.595.94.502.195.435/gambar-rangkaian-umum-dari-ic-ds.webp)
![Tabel 2.4. Memori pada IC DS1307 [9]](https://thumb-ap.123doks.com/thumbv2/123dok/829864.606352/35.595.97.527.84.592/tabel-memori-pada-ic-ds.webp)