TEKN IK PEN GHILAN GAN HARMON IS A PADA IN VERTER S ATU FAS A
DEN GAN MIKROPROS ES OR S EBAGAI PEMBAN GKIT S IN YAL KEN DALI
TUGAS AKHIR
Oleh :
AGUS SUGIYONO 7382062
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNOLOGI INDUSTRI
TEKN IK PEN GHILAN GAN HARMON IS A PADA IN VERTER S ATU FAS A
DEN GAN MIKROPROS ES OR S EBAGAI PEMBAN GKIT S IN YAL KEN DALI
Oleh :
AGUS SUGIYONO 7382062
TUGAS AKHIR
Untuk melengkapi syarat-syarat memperoleh gelar Sarjana Teknik Elektro
Jurusan Teknik Elektro Fakultas Teknologi Industri
Institut Teknologi Bandung
TEKN IK PEN GHILAN GAN HARMON IS A PADA IN VERTER S ATU FAS A
DEN GAN MIKROPROS ES OR S EBAGAI PEMBAN GKIT S IN YAL KEN DALI
Oleh :
AGUS SUGIYONO 7382062
Tugas akhir ini telah diterima dan disahkan sebagai kolokium untuk memenuhi persyaratan
guna mencapai gelar sarjana pada
SUB JURUSAN TEKNIK TENAGA LISTRIK JURUSAN TEKNIK ELEKTRO
FAKULTAS TEKNOLOGI INDUSTRI INSTITUT TEKNOLOGI BANDUNG
Disahkan oleh : Pembimbing,
. . . . sesungguhnya sesudah kesulitan itu
ada kemudahan. Maka apabila kamu telah
selesai dari sesuatu urusan, kerjakanlah
dengan sungguh-sungguh urusan yang lain
(Q.S. 94 : 6-7)
K upersembahkan untuk :
B apak I bu
i
KATA PENGANTAR
Dengan rahmat dan karunia Allah S.W.T. penulis dapat
menyelesaikan tugas akhir ini. Tugas akhir ini merupakan syarat
untuk memperoleh gelar kesarjanaan di Jurusan Teknik Elektro,
Institut Teknologi Bandung.
Dengan selesainya tugas akhir ini penulis mengucapkan
terima kasih yang sebesar- besarnya kepada :
1. Bapak Ir. Harry Sosrohadisewojo selaku wali dan pembimbing
tugas akhir.
2. Bapak Ir. Agus Purwadi yang banyak membantu masalah
teknik.
3. Staf dan karyawan Laboratorium Konversi Energi Elektrik
dan PIKSI ITB yang telah memberi fasilitas untuk
menyelesaikan tugas akhir.
4. Teman- teman terutama Endro dan teman- teman serumah yang
telah membantu untuk menyelesaikan tugas akhir ini.
Penulis menyadari masih banyak kekurangan dalam
tugas akhir ini. Kritik dan saran untuk perbaikan tugas akhir ini
sangat diharapkan. Akhir kata, semoga tugas akhir ini dapat
bermanfaat bagi kita semua.
Bandung, September 1988
ii
SARI
Inverter yang digunakan pada UPS tegangan
keluarannya harus dapat dikendalikan dan kualitasnya baik.
Untuk memperoleh hasil tersebut digunakan teknik penghilangan
harmonisa. Teknik ini didukung adanya komponen daya yang
mempunyai kecepatan komutasi yang tinggi dan adanya
mikroprosesor sebagai pembangkit sinyal kendali.
Dengan menggunakan deret Fourier dapat ditentukan
persamaan tegangan keluaran inverter. Berdasarkan persamaan
ini dibuat persamaan nonlinear simultan untuk menghitung sudut
komutasi. Perhitungan sudut komutasi menggunakan metode
Newton Ra phson dan dilakukan dengan menggunakan program
komputer serta dibuat pola gelombang sinyal kendali inverter.
Berdasarkan pola gelombang tersebut dibuat program
pembangkit sinyal kendali dengan menggunakan sistem
mikroprosesor. Kemudian diterapkan pada inve rter satu fasa
iii
DAFTAR ISI
hal.
KATA PENGANTAR i
SARI ii
DAFTAR ISI iii
DAFTAR GAMBAR vii
DAFTAR TABEL x
1 . PENDAHULUAN 1
1.1 Latar Belakang 1
1.2 Perumusan Masalah 1
1.3 Pembatasan Masalah dan Asumsi 2
1.4 Sistematika Pembahasan 3
2 . INVERTER SATU FASA 5
2.1 Konfigurasi Rangkaian Daya 5
2.1.1 Inverter satu fasa jembatan setengah 5
2.1.2 Inverter satu fasa dengan beban tap tengah 6
2.1.3 Inverter satu fasa jembatan penuh 6
2.2 Komponen Daya 7
2.2.1 Tiristor 8
2.2.2 Transistor 8
2.2.3 MOSFET 9
2.2.4 GTO 10
2.3 Rangkaian Pembangkit Sinyal Kendali 12
iv
2.3.2 Rangkaian digital 13
2.3.3 Sistem mikroprosesor 13
3 . HARMONISA TEGANGAN KELUARAN INVERTER SATU FASA 18
3.1 Deret Fourier 18
3.1.1 Simetri genap 20
3.1.2 Simetri ganjil 22
3.1.3 Simetri setengah gelombang 24
3.2 Analisis Bentuk Tegangan Keluaran 26
3.3 Harmonisa Tegangan Keluaran 29
4 . TEKNIK PENGHILANGAN HARMONISA PADA INVERTER
SATU FASA DENGAN MIKROPROSESOR SEBAGAI PEM-
BANGKIT SINYAL KENDALI 32
4.1 Metode Newton Raphson Untuk Menghitung
Sudut Komutasi 32
4.2 Program Komputer 37
4.2.1 Program untuk menghitung sudut komutasi 37
4.2.2 Program untuk menghitung besar amplitude
harmonisa 38
4.2.3 Program untuk membuat pola gelombang 39
4.2.4 Program utama 41
4.3 Mikroprosesor Sebagai Pembangkit Sinyal Kendali 41
4.3.1 Perangkat keras 41
4.3.2 Perangkat lunak 43
4.3.3 Rangkaian catu daya 51
4.4 Rangkaian Daya 51
v
5.1 Hasil Perhitungan Komputer 55
5.2 Pengamatan Sinyal Kendali 58
5.3 Pengamatan Gelombang Keluaran Inverter 62
5.4 Pengamatan Kendali Tegangan 64
6 . ANALISIS 66
6.1 Analisis Sinyal Kendali 66
6.2 Analisis Tegangan Keluaran 66
6.2.1 Sudut komutasi 66
6.2.2 Bentuk tegangan keluaran 68
6.2.3 Harmonisa 68
6.3 Analisis Kendali Tegangan 70
7 . KESIMPULAN DAN SARAN 73
7.1 Kesimpulan 73
7.2 Saran 74
DAFTAR PUSTAKA 75
L A M P I R A N A : Program untuk menghitung sudut
komutasi, amplitude harmonisa dan
pola gelombang 79
L A M P I R A N B : Hasil perhitungan komputer untuk
6 pulsa 86
L A M P I R A N C : Hasil perhitungan komputer untuk
vi
L A M P I R A N D : Program pembangkit sinyal kendali
inverter 102
L A M P I R A N E : Rangkaian pembangkit sinyal kendali
vii
DAFTAR GAMBAR
hal.
Gambar 2.1 Inverter satu fasa jembatan setengah 5
Gambar 2.2 Inverter satu fasa dengan beban tap tengah 6
Gambar 2.3 Inverter satu fasa jembatan penuh 7
Gambar 2.4 Karakteristik tegangan arus tiristor 8
Gambar 2.5 Karakteristik transistor 9
Gambar 2.6 Daerah penggunaan komponen daya 12
Gambar 2.7 Rangkaian osilator dan bentuk gelombang keluaran 13
Gambar 2.8 Simbol FLIP- FLOP dan tabel kebenarannya 14
Gambar 2.9 Organisasi sistem mikroprosesor 15
Gambar 3.1 Fungsi periodik 18
Gambar 3.2 Simetri genap dan simetri ganjil 20
Gambar 3.3 Simetri setengah gelomb ang 24
Gambar 3.4 Bentuk tegangan keluaran inverter 27
Gambar 4.1 Logika program utama 40
Gambar 4.2 Diagram blok pembangkit sinyal kendali 42
Gambar 4.3 Diagram blok PIO 44
Gambar 4.4 Kata kendali PIO 44
Gambar 4.5 Diagram blok CTC 45
Gambar 4.6 Register kendali kanal 46
Gambar 4.7 Aliran program utama 48
Gambar 4.8 Bentuk sinyal kendali 49
viii
Gambar 4.10 Rangkaian catu daya untuk rangkaian
kendali 51
Gambar 4.11 Rangkaian pengaman komponen daya 52
Gambar 4.12 Rangkaian pacu basis 53
Gambar 4.13 Catu daya untuk rangkaian pacu basis 54
Gambar 5.1 Hasil perhitunga n bila iterasi tidak konvergen 56
Gambar 5.2 Bentuk gelombang keluaran inverter berda- sarkan nilai sudut komutasi untuk 6 pulsa 57
Gambar 5.3 Bentuk gelombang keluaran inverter berda- sarkan nilai sudut komutasi untuk 9 pulsa 58
Gambar 5.4 Sinyal kendali untuk inverter jembatan penuh (Gambar 2.3) dengan 6 pulsa 60
Gambar 5.5 Sinyal kendali untuk inverter jembatan penuh (Gambar 2.3) dengan 9 pulsa 61
Gambar 5.6 Rangkaian pengujian bentuk gelombang keluaran inverter 62
Gambar 5.7 Bentuk tegangan keluaran inverter dengan 6 pulsa 63
Gambar 5.8 Bentuk tegangan keluaran inverter dengan 9 pulsa 63
Gambar 6.1 Besar sudut komutasi terhadap perubahan gelombang dasar dengan 6 pulsa 67
Gambar 6.2 Besar sudut komutasi terhadap perubahan gelombang dasar dengan 9 pulsa 67
ix
bahan gelombang dasar dengan 9 pulsa 70
Gambar 6.5 Besar tegangan keluaran inverter terhadap
tegangan masukan ADC untuk 6 pulsa 71
Gambar 6.6 Besar tegangan keluaran inverter terhadap
x
DAFTAR TABEL
hal.
Tabel 1. Kemungkinan kondisi hubung inverter jembatan
penuh 7
Tabel 2. Perbandingan tiristor, transistor, MOSFET
dan GTO 11
Tabel 3. Simbol OR, AND, dan NOT serta tabel kebe-
narannya 14
Tabel 4. Amplitude harmonisa dengan sudut komutasi
30o dan 60o 30
Tabel 5. Amplitude harmonisa dengan sudut komutasi
15.42o dan 87.40o 30
Tabel 6. Peta memori mikroprosesor 42
Tabel 7. Peta alamat peralatan mikroprosesor 43
Tabel 8. Nilai awal sudut komutasi supaya iterasi
konvergen 57
Tabel 9. Perubahan isi RAM untuk gelombang 6 pulsa 58
Tabel 10. Pengujian kendali tegangan dengan 6 pulsa 64
1 BAB 1 PENDAHULUAN
1 . 1 L a t a r B e l a k a n g
P e r a l a t a n m o d e r n s e p e r t i : p e r a l a t a n k e d o k t e r a n , peralatan pengolah data, dan peralatan telekomunikasi kebanyakan memerlukan catu daya tak terputus (Uninterruptible Power Supply – UPS) dengan kualitas yang baik. Ole h karena itu, inverter yang digunakan pada UPS tersebut harus memenuhi persyaratan- p e r s y a r a t a n s e b a g a i berikut :
- Mempunyai tegangan keluaran dengan harmonisa kurang d a r i 5 p e r s e n .
- P e r u b a h a n t e g a n g a n k e r j a t e r h a d a p p e r u b a h a n b e b a n t i d a k lebih dari 3 persen.
- Ketelitian frekuensi kerja lebih besar dari 1 per-sen.( 3 )
Kinerja inverter terus mengalami perbaikan supaya dapat memenuhi persyaratan seperti tersebut di atas. Hal ini sejalan dengan perkembangan dalam bidang komponen daya dan munculnya mikroprosesor yang dapat digunakan sebagai rangkaian kendali.
1 . 2 P e r u m u s a n M a s a l a h
2 menjadi pertimbangan utama.
Berdasarkan uraian tersebut di atas, yang menjadi pokok permasalahan pada tugas akhir ini adalah bagaimana cara menghilangkan harmonisa dan bagaimana cara mengen-dalikan tegangan keluaran inverter.
1 . 3 P e m b a t a s a n M a s a l a h d a n A s u m s i
Untuk mempermudah pembahasan dalam tugas akhir ini dibuat batasan dan asumsi sebagai berikut :
- Inverter yang digunakan adalah inverter satu fasa jembatan penuh dengan menggunakan komponen daya transistor dan sebagai pembangkit sinyal kendali digunakan sistem mik r o p r o s e s o r .
- Tegangan keluaran inverter yang dibahas merupakan gelombang tiga tingkat, yaitu : +E, 0, dan – E dengan E adalah besar tegangan sumber searah.
- Perhitungan sudut komutasi diambil contoh untuk enam pulsa dan sembilan pulsa tiap setengah periode. Begitu juga untuk pembangkitan sinyal kendali.
- Frekuensi gelombang keluaran inverter dibuat tetap yaitu 50 Hz.
- Karena pembangkit sinyal kendali menggunakan sistem m i k r o p r o s e s o r , m a k a p e r u b a h a n t e g a n g a n t i d a k d a p a t dilakukan secara kontinu. Dalam tugas akhir ini tegangan keluaran inverter dibuat dapat dikendalikan dengan kenaikan satu persen.
1 . 4 S i s t e m a t i k a P e m b a h a s a n
Tugas akhir ini terdiri atas tujuh bab yang disusun dalam
sistematika berikut ini.
Bab 1 merupakan pendahuluan yang menguraikan latar
belakang, perumusan masalah, pembatasan masalah, dan
sistematika pembahasan. Bab ini dimaksudkan untuk memberi
gambaran menyeluruh mengenai masalah yang dihadapi.
Bab 2 menguraikan hal- hal yang berhubungan dengan
inverter satu fasa. Hal- hal tersebut meliputi konfigurasi
rangkaian daya, komponen daya, dan rangkaian pembangkit
sinyal kendali.
Bab 3 membahas penurunan persamaan matematik dari
bentuk tegangan keluaran inverter serta menentukan
harmonisa-harmonisa yang timbul.
Bab 4 membahas penggunaan teknik penghilangan
harmonisa untuk memperoleh gelombang tegangan keluaran
inverter yang harmonisa orde rendahnya dihilangkan dan
mengatur gelombang dasarnya. Pembahasan meliputi
penggu-naan metode iterasi Newton Raphson untuk menghitung sudut
komutasi gelombang, mewujudkan perhitungan tersebut dengan
menggunakan program komputer, dan dibahas juga penerapannya
pada inverter satu fasa jembatan penuh yang dikendalikan
dengan mikroprosesor.
Bab 5 membahas hasil- hasil pengamatan laboratorium.
Pembahasan meliputi hasil perhituingan dengan menggunakan
komputer, bentuk sinyal kendali, bentuk tegangan keluaran
4 Bab 6 menganalisis hasil penga matan laboratorium dibandingkan dengan perhitungan yang dibuat.
5 BAB 2
INVERTER SATU FASA
2 . 1 L a t a r B e l a k a n g
B e r d a s a r k a n k o n f i g u r a s i n y a , r a n g k a i a n d a y a i n v e r t e r s a t u f a s a d a p a t d i k e l o m p o k k a n m e n j a d i t i g a m a c a m .
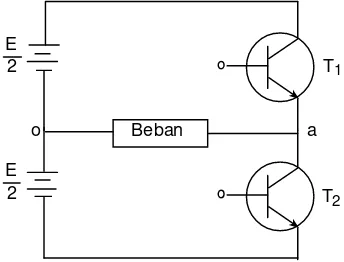
2 . 1 . 1 I n v e r t e r s a t u f a s a j e m b a t a n s e t e n g a h
I n v e r t e r i n i m e n g g u n a k a n d u a b u a h k o m p o n e n d a y a , T1 d a n T2, u n t u k m e n g h u b u n g k a n t i t i k a d e n g a n t e g a n g a n p o s i t i p a t a u n e g a t i p . K o m b i n a s i b u k a h u b u n g p a d a k o m p o n e n d a y a m e n g h a s i l k a n 4 m a c a m k e a d a a n . K e a d a a n h u b u n g p a d a T1 d a n T2
G a m b a r 2 . 1 I n v e r t e r s a t u f a s a j e m b a t a n s e t e n g a h
a k a n m e n g a k i b a t k a n s u m b e r a r u s s e a r a h t e r h u b u n g s i n g k a t . K e a d a a n b u k a p a d a T1 d a n T2 m e n g a k i b a t k a n t e g a n g a n p a d a t i t i k a t i d a k t e n t u , t e r g a n t u n g d a r i k o n d i s i a w a l d a r i r a n g k a i a n d a n j e n i s b e b a n n y a . D e n g a n d e m i k i a n h a n y a d u a k e a d a a n y a n g d a p a t d i k e n d a l i k a n u n t u k m e m b a n g k i t k a n t e g a n g a n b o l a k - b a l i k p a d a b e b a n . T1 h u b u n g d a n T2 b u k a m e n g h a s i l k a n Va o p o s i t i p . T1 b u k a d a n T2 h u b u n g m e n g h a s i l k a n Va o n e g a t i p .
Beban
T1
T2 E
2
E 2
6
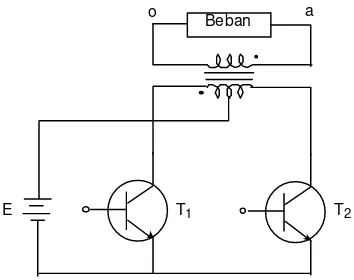
2 . 1 . 2 I n v e r t e r s a t u f a s a d e n g a n b e b a n t a p t e n g a h
C a r a k e r j a i n v e r t e r s a t u f a s a d e n g a n b e b a n t a p t e n g a h s a m a d e n g a n i n v e r t e r j e m b a t a n s e t e n g a h . T a p t e n g a h t r a n s f o r m a t o r b e r f u n g s i s u p a y a b e b a n m e n d a p a t t e g a n g a n b o l a k b a l i k . T1 h u b u n g d a n T2 b u k a a k a n m e n g h a s i l k a n Va o n e g a t i p . T1 b u k a d a n T2 h u b u n g m e n g h a s i l k a n Va o p o s i t i p .
T1 T2
E
Beban
o a
G a m b a r 2 . 2 I n v e r t e r s a t u f a s a d e n g a n b e b a n t a p t e n g a h
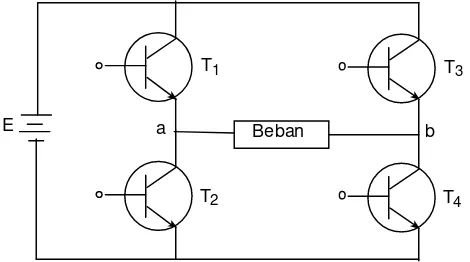
2 . 1 . 3 I n v e r t e r s a t u f a s a j e m b a t a n p e n u h
I n v e r t e r i n i l e b i h d i k e n a l s e b a g a i i n v e r t e r j e m b a t a n . D a p a t d i t i n j a u s e b a g a i d u a b u a h i n v e r t e r s e t e n g a h j e m b a t a n , s e h i n g g a p e r s a m a a n t e g a n g a n Va b d a p a t d i n y a t a k a n s e b a g a i b e r i k u t .
Va b = Va o - Vb o
D e n g a n t i t i k o a d a l a h t i t i k t e n g a h t e o r i t i s p a d a s u m b e r t e g a n g a n d a n Va o s e r t a Vb o m e r u p a k a n d u a k e a d a a n y a n g a d a p a d a i n v e r t e r j e m b a t a n s e t e n g a h .
Beban
T3
T4 E
T1
T2
a b
Gambar 2.3 Inverter satu fasa j embatan penuh
d a r i k o m b i n a s i i n i d a p a t m e n g h a s i l k a n t e g a n g a n b o l a k - b a l i k p a d a b e b a n k a r e n a k e m u n g k i n a n y a n g l a i n n y a a k a n m e n g a k i b a t k a n s u m b e r t e g a n g a n t e r h u b u n g s i n g k a t . D a r i T a b e l 1 t e r l i h a t b a h w a 2 k e m u n g k i n a n k o n d i s i h u b u n g b u k a k o m p o n e n d a y a m e n g h a s i l k a n t e g a n g a n Va b n o l , s e h i n g g a p r a k t i s n y a h a n y a a d a 3 k e m u n g k i n a n b a g i t e g a n g a n b e b a n Va b, y a i t u + E , - E , d a n 0 .
K o n d i s i h u b u n g T e g a n g a n b e b a n Va b
T1, T4 + E
T2, T3 - E
T1, T3 0
T2, T4 0
T a b e l 1 K e m u n g k i n a n k o n d i s i h u b u n g k o m p o n e n d a y a
2 . 2 K o m p o n e n D a y a
8 d i g u n a k a n a d a l a h : t i r i s t o r , t r a n s i s t o r , M O S F E T , d a n G T O . M a s i n g - m a s i n g k o m p o n e n m e m p u n y a i k a r a k t e r i s t i k y a n g k h a s .
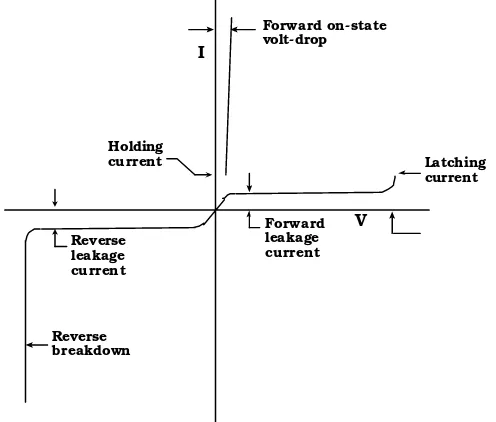
2 . 2 . 1 T i r i s t o r
T i r i s t o r m e r u p a k a n s a k l a r e l e k t r o n i k y a n g d i l e n g k a p i d e n g a n e l e k t r o d a k e n d a l i . M e m p u n y a i t i g a t e r m i n a l : A n o d a ( A ) , K a t o d a ( K ) , d a n G a t e ( G ) . A r u s d a p a t m e n g a l i r d a r i a n o d a k e k a t o d a b i l a Va k p o s i t i p d a n m e n g a l i r a r u s g a t e . S e l a m a Va k p o s i t i p a r u s t e t a p m e n g a l i r m e s k i p u n a r u s g a t e s a m a d e n g a n n o l . U n t u k m e m a d a m k a n n y a , a r u s a n o d a d i p e r k e c i l ( 6 0 m A ) s e l a m a w a k t u t e r t e n t u ( 5 0 – 1 0 0 µs ) .
I
V
Forward on-state volt-drop
Holding
current Latching
current
Forward leakage current Reverse
leakage current
Reverse breakdown
G a m b a r 2 . 4 K a r a k t e r i s t i k t e g a n g a n - a r u s t i r i s t o r
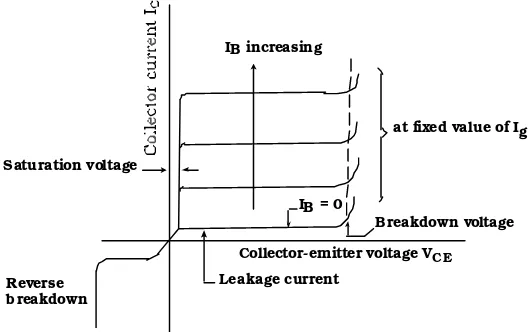
2 . 2 . 2 T r a n s i s t o r
S e b a g a i s a k l a r e l e k t r o n i k , t r a n s i s t o r d i o p e r a s i k a n p a d a d a e r a h j e n u h p a d a s a a t k o n d u k s i d a n p a d a d a e r a h c u t o f f s e l a m a t i d a k k o n d u k s i . B i l a m e n g a l i r a r u s b a s e , t r a n s i s t o r a k a n k o n d u k s i . P a d a s a a t p e n y a l a a n , a r u s b a s e h a r u s c u k u p b e s a r s e h i n g g a p r o s e s p e n y a l a a n n y a c e p a t . P a d a s a a t p e m a d a m a n , a r u s d i k u r a n g i d e n g a n k e c e p a t a n y a n g d a p a t d i i k u t i o l e h a r u s k o l e k t o r s e h i n g g a t i d a k m e n i m b u l k a n s e c o n d a r y b r e a k d o w n.
B reakdown voltage at fixed value of Ig
Reverse b reakdown
Collector-emitter voltage VCE
Saturation voltage
IB increasing
IB = 0
Leakage current
G a m b a r 2 . 5 K a r a k t e r i s t i k t r a n s i s t o r
T r a n s i s t o r m e m p u n y a i w a k t u k o m u t a s i y a n g l e b i h c e p a t d a r i p a d a t i r i s t o r ( k u r a n g d a r i 2 µs ) . M e s k i p u n d e m i k i a n t r a n s i s t o r m e m e r l u k a n a r u s b a s e y a n g b e s a r d a n k u r a n g t a h a n t e r h a d a p p e m b e b a n a n l e b i h . P a b r i k b i a s a n y a m e m b u a t d a e r a h o p e r a s i a m a n u n t u k t r a n s i s t o r y a n g d i g u n a k a n s e b a g a i k o m p o n e n d a y a .
2 . 2 . 3 M O S F E T
10 t a h a n t e r h a d a p g a n g g u a n . P e r b e d a a n n y a , p a d a t r a n s i s t o r p e n g e n d a l i a n k o m u t a s i d i l a k u k a n d e n g a n a r u s b a s e ( Ib) s e d a n g k a n p a d a M O S F E T p e n g e n d a l i a n k o m u t a s i d i l a k u k a n d e n g a n t e g a n g a n g a t e ( VG S) .
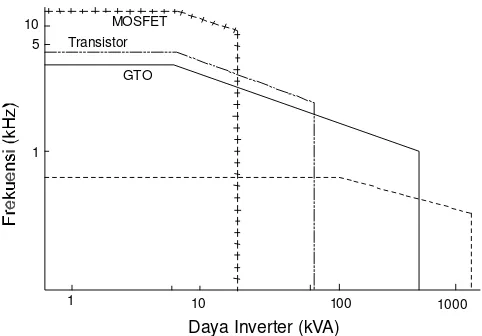
B i l a k e c e p a t a n t i n g g i d i p e r l u k a n , m a k a M O S F E T m e r u p a k a n k o m p o n e n d a y a y a n g t e r b a i k . T i r i s t o r d a n t r a n s i s t o r d a p a t d i g u n a k a n p a d a f r e k u e n s i 4 0 0 H z – 2 k H z , M O S F E T d a p a t d i g u n a k a n p a d a f r e k u e n s i 2 0 k H z . P r o s e s p e m a d a m a n d a n p e n y a l a a n M O S F E T k i r a - k i r a 8 0 n s d a n d a y a y a n g h i l a n g k a r e n a p r o s e s t e r s e b u t s a n g a t k e c i l . M e s k i p u n d e m i k i a n M O S F E T m e m p u n y a i k e l e m a h a n k a r e n a t i d a k b i s a d i g u n a k a n u n t u k d a y a y a n g b e s a r d a n h a r g a n y a m a h a l .
2 . 2 . 4 G T O
G T O m e r u p a k a n k o m p o n e n d a y a t e r b a r u d a n l a m b a t l a u n b e r h a s i l m e n g g e s e r p e n g g u n a a n k o m p o n e n - k o m p o n e n d a y a y a n g l a i n . S i f a t - s i f a t p e n t i n g d a r i t i r i s t o r d a n t r a n s i s t o r d i m i l i k i n y a . G T O m e m p u n y a i k e l e b i h a n y a n g l a i n , d i a n t a r a n y a :
- M e m p u n y a i k e t a h a n a n t e r h a d a p t e g a n g a n l e b i h d a n a r u s l e b i h y a n g t i n g g i .
- M e m p u n y a i k e c e p a t a n k o m u t a s i y a n g l e b i h t i n g g i .
- M e n g e n d a l i k a n n y a m u d a h , d e n g a n p i c u p o s i t i p a k a n k o n d u k s i d a n d e n g a n p i c u n e g a t i p a k a n p a d a m .
- R u g i - r u g i d a y a p a d a s a a t p e m a d a m a n d a p a t d i k u r a n g i . - U k u r a n d a n b e r a t p e r a l a t a n d a p a t d i k u r a n g i .
Tiristor Transistor MOSFET GTO
1 Simbol
A K G C B E G D S
2 Kendali Pemadaman
- tidak ada - ada - daya rendah
- ada - daya sangat
rendah
- ada - daya tinggi
3 Kendali Penyalaan
- daya rendah - kemungkinan
konduksi jika ada impuls
- daya rendah - memerlukan
arus basis yang cukup (IB≥Ic/β)
- daya sangat rendah
- daya rendah
4 Kecepatan Switching
- lambat (50 – 100 µs)
- cepat (1 µs)
- cepat sekali (50 – 100 ns)
- cepat (1 – 2 µs)
5 Resiko Konduksi Balik
- tidak ada - ada kemung-kinan arus kolektor negatip
- ada - tidak ada
6 Ketahanan Listrik
- tahan terhadap tegangan lebih
- tidak tahan (dibatasi oleh Vmax, Imax, dan Pmax)
- tidak tahan terhadap tegangan dan arus lebih
- tahan terhadap tegangan lebih
7 Disipasi Daya Saat Konduksi - rendah - rendah - besar - rendah 8 Rating Tegangan dan Arus - 4500 V
2000 A
- 100 V 200 A
- 450 V 15 A
- 4500 V 2000 A 9 Tegangan Saat Konduksi - Vak = 1-2 V - Vce sat = 1 V - (3-4) V - 2,5 V
T a b e l 2 P e r b a n d i n g a n t i r i s t o r , t r a n s i s t o r , M O S F E T d a n G T O( 1 1 )
M e s k i p u n d e m i k i a n b e l u m b a n y a k d i g u n a k a n k a r e n a h a r g a n y a m a h a l .
12
10 5
1
1 10 100 1000
Daya Inverter (kVA)
MOSFET Transistor
GTO
G a m b a r 2 . 6 D a e r a h p e n g g u n a a n k o m p o n e n d a y a ( 1 5 )
2 . 3 R a n g k a i a n P e m b a n g k i t S i n y a l K e n d a l i
R a n g k a i a n p e m b a n g k i t s i n y a l k e n d a l i d a p a t d i w u j u d k a n d e n g a n p e r a n g k a t k e r a s y a n g b e r m a c a m - m a c a m . M u l a - m u l a b e r u p a r a n g k a i a n a n a l o g . D e n g a n r a n g k a i a n i n i d i p e r l u k a n r a n g k a i a n y a n g r u m i t d a n b e s a r . D i s a m p i n g i t u , k o m p o n e n r a n g k a i a n a n a l o g m u d a h d i p e n g a r u h i g a n g g u a n d a r i l u a r . S e j a l a n d e n g a n p e r k e m b a n g a n d a l a m t e k n i k p e n g h i l a n g a n h a r m o n i s a , m a k a r a n g k a i a n p e m b a n g k i t s i n y a l k e n d a l i p u n m e m e r l u k a n s u s u n a n y a n g m a k i n r u m i t . U n t u k m e n g u r a n g i t i n g k a t k e r u m i t a n d i g u n a k a n r a n g k a i a n l o g i k . R a n g k a i a n i n i m u d a h d i w u j u d k a n d a n m e m p u n y a i k e t e l i t i a n y a n g c u k u p t i n g g i .
M i k r o p r o s e s o r m e r u p a k a n p e r k e m b a n g a n t e r a k h i r d a r i r a n g k a i a n p e m b a n g k i t s i n y a l k e n d a l i i n v e r t e r .
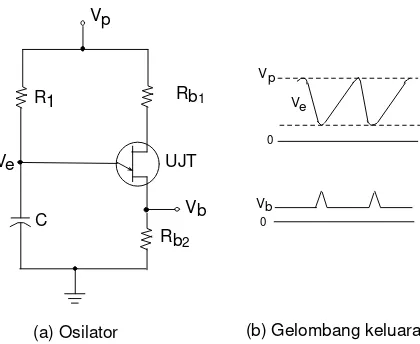
2 . 3 . 1 R a n g k a i a n a n a l o g
UJT
Vb Rb2
C
R1 Rb1
Vp
Ve
Vb
0 0
Vp Ve
(a) Osilator (b) Gelombang keluaran
G a m b a r 2 . 7 R a n g k a i a n o s i l a t o r d a n b e n t u k g e l o m b a n g k e l u a r a n
K a p a s i t o r C d i b e r i m u a t a n m e l a l u i r e s i s t o r R1 s a m p a i t e g a n g a n e m i t o r ( Ve) m e n c a p a i n i l a i Vp. K a p a s i t o r C a k a n m e m b u a n g m u a t a n m e l a l u i Rb 2 d a n p a d a s a a t i t u U J T m e n g a l i r k a n a r u s . J i k a t e g a n g a n e m i t o r m e n c a p i n i l a i 2 v o l t , e m i t o r a k a n b e r h e n t i m e n g a l i r k a n a r u s s e h i n g g a U J T a k a n p a d a m . S i k l u s t e r u s b e r u l a n g s e h i n g g a d i h a s i l k a n g e l o m b a n g s e p e r t i p a d a G a m b a r 2 . 7 . b
2 . 3 . 2 R a n g k a i a n d i g i t a l
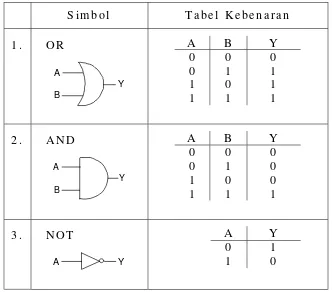
D e n g a n a d a n y a r a n g k a i a n t e r i n t e g r a s i d i g i t a l , r a n g k a i a n p e m b a n g k i t s i n y a l k e n d a l i i n v e r t e r a k a n s e m a k i n s e d e r h a n a . K o m p o n e n d a s a r y a n g d i g u n a k a n a d a 4 m a c a m , y a i t u : O R , A N D , N O T , d a n F L I P - F L O P . K o m p o n e n i n i s e r i n g d i s e b u t g e r b a n g l o g i k a d a n b e k e r j a b e r d a s a r k a n p e r s a m a a n a l j a b a r B o o l e a n .
14 b e r u b a h . Y a n g t e r m a s u k r a n g k a i a n i n i a d a l a h O R G a t e, A N D
G a t e, d a n N O T G a t e. P a d a T a b e l 3 d i p e r l i h a t k a n s i m b o l r a n g k a i a n d a n t a b e l k e b e n a r a n n y a .
S i m b o l T a b e l K e b e n a r a n
1 . O R A B
Y
A B Y 0 0 0 0 1 1 1 0 1 1 1 1
2 . A N D A B
Y
A B Y 0 0 0 0 1 0 1 0 0 1 1 1
3 . N O T
A Y
A Y 0 1 1 0
T a b e l 3 S i m b o l O R , A N D , d a n N O T s e r t a t a b e l k e b e n a r a n n y a
P a d a r a n g k a i a n s e k u e n s i a l m e m e r l u k a n p u l s a c l o c k u n t u k m e n y e l a r a s k a n o p e r a s i . M e s k i p u n m a s u k a n t e l a h b e r u b a h , k e l u a r a n a k a n d i p e r t a h a n k a n t e t a p s e b e l u m t e r j a d i p e r u b a h a n p u l s a c l o c k. Y a n g t e r m a s u k r a n g k a i a n i n i a d a l a h F L I P - F L O P .
Sn Rn Qn+1 S Ck R Q Q 0 1 0 1 0 0 1 1 Qn 1 0 X
(a) Simbol (b) Tabel kebenaran
F L I P - F L O P m e m p u n y a i d u a k e a d a a n s t a b i l y a i t u p a d a k e l u a r a n Q = 1 y a n g d i s e b u t k e a d a a n S E T d a n k e l u a r a n Q = 0 y a n g d i s e b u t k e a d a a n R E S E T. N i l a i k e l u a r a n Q d a p a t d i u b a h d e n g a n m e n g a t u r n i l a i m a s u k a n S d a n R s e r t a a d a n y a p e r u b a h a n p u l s a c l o c k ( C k ) . P a d a G a m b a r 2 . 8 i n d e k s n m e n y a t a k a n s a a t s e b e l u m t e r j a d i n y a p e r u b a h a n c l o c k d a n i n d e k s n + 1 m e n y a t a k a n s e t e l a h t e r j a d i p e r u b a h a n p u l s a c l o c k . T a n d a X a d a l a h k o n d i s i y a n g t i d a k d i d e f i n i s i k a n .
D e n g a n m e n g g a b u n g k a n k e d u a m a c a m r a n g k a i a n i n i d a p a t d i b u a t s i n y a k k e n d a l i d e n g a n b e n t u k g e l o m b a n g y a n g t e r t e n t u .
2 . 3 . 3 S i s t e m m i k r o p r o s e s o r
M i k r o p r o s e s o r m e m e r l u k a n k o m p o n e n p e n u n j a n g u n t u k m e m b e n t u k s u a t u s i s t e m m i k r o p r o s e s o r y a n g l e n g k a p d a n
CPU RAM ROM
B u s D a t a
PIO ADC CTC Analog
I/O Dekoder
Alamat B u s A l a m a t
G a m b a r 2 . 9 O r g a n i s a s i s i s t e m m i k r o p r o s e s o r
d a p a t b e k e r j a . K o m p o n e n p e n u n j a n g t e r s e b u t a n t a r a l a i n : - R O M (R e a d O n l y M e m o r y)
16
- R A M (R a n d o m A c c e s s M e m o r y)
R A M a d a l a h m e m o r i t e m p a t m e n y i m p a n d a t a . I s i d a t a d a p a t d i b a c a a t a u d i h a p u s d e n g a n m e n u l i s k a n d a t a b a r u . I s i R A M b e r s i f a t s e m e n t a r a k a r e n a b i l a c a t u d a y a d i m a t i k a n , i s i n y a a k a n h i l a n g .
- P I O (P e r i p h e r a l I n p u t O u t p u t)
P I O m e r u p a k a n p e r a l a t a n m a s u k a n k e l u a r a n y a n g d a p a t d i p r o g r a m s e b a g a i m a s u k a n a t a u k e l u a r a n .
- C T C (C o u n t e r T i m e r C i r c u i t s)
C T C b e r f u n g s i s e b a g a i p e n g a t u r s e l a n g w a k t u a t a u p e n c a c a h p u l s a . M e m p u n y a i b e b e r a p a c o u n t e r / t i m e r y a n g b e r d i r i s e n d i r i d a n d a p a t d i p r o g r a m s e b a g a i p e n g a t u r s e l a n g w a k t u a t a u p e n c a c a h p u l s a .
- A D C (A n a l o g t o D i g i t a l C o n v e r t e r)
A D C m e r u p a k a n a l a t p e n g u b a h b e s a r a n a n a l o g k e b e s a r a n d i g i t a l . T e k n i k p e n g u b a h a n b i a s a n y a d e n g a n m e t o d e p e n d e k a t a n b e r u r u t (s u c c e s s i v e a p p r o x i m a t i o n) .
- D e k o d e r A l a m a t
D e k o d e r a l a m a t m e r u p a k a n r a n g k a i a n u n t u k m e n e n t u k a n a l a m a t d a r i R O M , R A M , d a n p e r a l a t a n p e n u n j a n g l a i n n y a . D e n g a n p e n g a l a m a t a n i n i C P U d a p a t m e n g h u b u n g i p e r a l a t a n t e r s e b u t .
k e s e l u r u h a n s i s t e m , t e r m a s u k s i s t e m p r o t e k s i n y a . J u g a l e b i h f l e k s i b e l k a r e n a k i n e r j a n y a m u d a h d i u b a h h a n y a d e n g a n m e n g u b a h p e r a n g k a t l u n a k n y a .
18 BAB 3
HARMONISA TEGANGAN KELUARAN INVERTER SATU FASA
H a r m o n i s a t e g a n g a n k e l u a r a n i n v e r t e r d a p a t d i t e n t u k a n b i l a p e r s a m a a n m a t e m a t i k d a r i t e g a n g a n k e l u a r a n i n v e r t e r t e l a h d i t e n t u k a n . P e r s a m a a n i n i d i d a p a t d e n g a n m e n g u r a i k a n b e n t u k g e l o m b a n g t e g a n g a n d e n g a n m e n g g u n a k a n d e r e t F o u r i e r . K a r e n a d e r e t F o u r i e r i n i m e m e g a n g p e r a n a n p e n t i n g , m a k a p e r l u d i b a h a s d a h u l u d e r e t F o u r i e r k e m u d i a n d i b a h a s p e n u r u n a n p e r s a m a a n m a t e m a t i k b e n t u k g e l o m b a n g t e g a n g a n d a n m e n e n t u k a n b e s a r a m p l i t u d e h a r m o n i s a n y a .
wt f(wt)
0 2p
G a m b a r 3 . 1 F u n g s i p e r i o d i k
3 . 1 D e r e t F o u r i e r
S e t i a p f u n g s i p e r i o d i k f (ωt ) d a p a t d i u r a i k a n m e n j a d i d e r e t t r i g o n o m e t r i t a k t e r h i n g g a d a n d i s e b u t d e r e t F o u r i e r . S u p a y a d a p a t d i u r a i k a n m e n j a d i d e r e t F o u r i e r , f u n g s i t e r s e b u t h a r u s m e m e n u h i k o n d i s i s e b a g a i b e r i k u t :
- I n t e g r a l
∫
+ π ωω 2
t
t
|f (ωt ) | d (ωt ) m e m p u n y a i h a r g a t e r t e n t u u n t u k
s e t i a p h a r g a ωt .
- F u n g s i f(ωt ) m e r u p a k a n f u n g s i k o n t i n u a t a u f u n g s i y a n g t i d a k k o n t i n u y a n g d i s k o n t i n u i t a s n y a t e r t e n t u d a l a m s a t u p e r i o d e . - D a l a m s a t u p e r i o d e f u n g s i f (ωt ) m e m p u n y a i h a r g a m a k s i m u m
d a n m i n i m u m y a n g j u m l a h n y a t e r t e n t u .
A m b i l s u a t u f u n g s i p e r i o d i k f (ωt ) m a k a d e r e t F o u r i e r u n t u k f u n g s i t e r s e b u t s e b a g a i b e r i k u t :
f (ωt ) = A0 + A1c o s (ωt ) + A2c o s ( 2ωt ) + A3c o s ( 3ωt ) + …
+ B1s i n (ωt ) + B2s i n ( 2ωt ) + B3s i n ( 3ωt ) + …
f (ωt ) = A0 +
∑
∞
=1 n
[ Anc o s ( nωt ) + Bns i n ( nωt ) ] ( 3 . 1 )
A0, An, d a n Bn d i s e b u t k o e f i s i e n F o u r i e r d a n d i t e n t u k a n d e n g a n r u m u s :
A0 =
∫
π
π
2
0
2 1
f (ωt ) d (ωt ) ( 3 . 2 . a )
An =
∫
π
π
2
0
1
20
Bn =
∫
π
π
2
0
1
f (ωt ) s i n ( nωt ) d (ωt ) ( 3 . 2 . c )
n = 1 , 2 , 3 , …
B e b e r a p a k o n d i s i k h u s u s b e n t u k f u n g s i d a p a t l e b i h m u d a h d i n y a t a k a n d a l a m d e r e t F o u r i e r y a i t u b i l a f u n g s i t e r s e b u t m e m p u n y a i b e n t u k s i m e t r i .
wt f(wt)
0 2p
-2p
wt f(wt)
0 2p
-2p
( a ) S i m e t r i g e n a p ( b ) S i m e t r i g a n j i l
G a m b a r 3 . 2 S i m e t r i g e n a p d a n s i m e t r i g a n j i l
3 . 1 . 1 S i m e t r i g e n a p
S u a t u f u n g s i d i k a t a k a n s i m e t r i g e n a p b i l a m e m e n u h i p e r s a m a a n s e b a g a i b e r i k u t :
f (ωt ) = f ( -ωt )
I n i b e r a r t i f u n g s i t e r s e b u t s i m e t r i t e r h a d a p s u m b u v e r t i k a l . U n t u k f u n g s i i n i d a p a t d i b u k t i k a n b a h w a k o e f i s i e n Bn s a m a d e n g a n n o l .
Bn =
∫
π
π
2
0
1
Bn =
∫
− π
π
π 1
f (ωt ) s i n ( nωt ) d (ωt )
Bn =
∫
− 0
[ 1
π
π f (ωt ) s i n ( nωt ) d (ωt ) +
∫
π
0
f (ωt ) s i n ( nωt ) d (ωt ) ]
B i l a v a r i a b e l ωt p a d a i n t e g r a l p e r t a m a d i g a n t i d e n g a n -σ d a n d i l a k u k a n p e n g u b a h a n b a t a s i n t e g r a l d i d a p a t :
Bn = −
∫
0
[ 1
π
π f ( -σ) s i n ( - nσ) d (σ) +
∫
π
0
f (ωt ) s i n ( nωt ) d (ωt ) ]
Bn = −
∫
π
π 0
[ 1
f (σ) s i n ( nσ) d (σ) +
∫
π
0
f (ωt ) s i n ( nωt ) d (ωt ) ]
S i m b o l y a n g d i g u n a k a n p a d a v a r i a b e l i n t e g r a l t i d a k m e m p e n g a r u h i n i l a i i n t e g r a s i n y a s e h i n g g a :
Bn = 0
K a r e n a f u n g s i s i m e t r i g e n a p m a k a k o e f i s i e n A0 d a n An d a p a t d i t e n t u k a n s e b a g a i b e r i k u t .
A0 =
∫
π
π
2
0
2 1
22
A0 =
∫
π
π
2
0
2 1
f (ωt ) d (ωt )
An =
∫
π
π
2
0
1
f (ωt ) c o s ( nωt ) d (ωt )
An =
∫
π
π 0
2
f (ωt ) c o s ( nωt ) d (ωt )
S e h i n g g a u n t u k f u n g s i s i m e t r i g e n a p b e r l a k u :
f (ωt ) = A0 +
∑
∞
=1 n
[ Anc o s ( nωt ) ] ( 3 . 3 . a )
A0 =
∫
π
π 0
1
f (ωt ) d (ωt ) ( 3 . 3 . b )
An =
∫
π
π 0
2
f (ωt ) c o s ( nωt ) d (ωt ) ( 3 . 3 . c )
3 . 1 . 2 S i m e t r i g a n j i l
F u n g s i s i m e t r i g a n j i l m e m p u n y a i s i f a t s i m e t r i t e r h a d a p t i t i k a w a l d a n m e m p u i n y a i h u b u n g a n :
f (ωt ) = - f ( -ωt )
An =
∫
π π 2 0 1f (ωt ) c o s ( nωt ) d (ωt )
An =
∫
− π
π
π 1
f (ωt ) c o s ( nωt ) d (ωt )
An =
∫
− 0
[ 1
π
π f (ωt ) c o s ( nωt ) d (ωt ) +
∫
π
0
f (ωt ) c o s ( nωt ) d (ωt ) ]
V a r i a b e l ωt p a d a i n t e g r a l p e r t a m a d i g a n t i d e n g a n -σ d a n d i l a k u k a n p e n g u b a h a n b a t a s i n t e g r a l d i d a p a t :
An = −
∫
0
[ 1
π
π f ( -σ) c o s ( - nσ) d (σ) +
∫
π
0
f (ωt ) c o s ( nωt ) d (ωt ) ]
An =
∫
π
π 0
[ 1
f ( -σ) c o s ( nσ) d (σ) +
∫
π
0
f (ωt ) c o s ( nωt ) d (ωt ) ]
An = −
∫
π
π 0
[ 1
f (σ) c o s ( nσ) d (σ) +
∫
π
0
f (ωt ) c o s ( nωt ) d (ωt ) ]
An = 0
D e n g a n c a r a y a n g s a m a d a p a t d i b u k t i k a n b a h w a :
24 K a r e n a f u n g s i g a n j i l , m a k a k o e f i s i e n Bn d a p a t d i t e n t u k a n s e b a g a i b e r i k u t :
Bn =
∫
π
π
2
0
1
f (ωt ) s i n ( nωt ) d (ωt )
Bn =
∫
π
π 0 2
f (ωt ) s i n ( nωt ) d (ωt )
S e h i n g g a u n t u k f u n g s i s i m e t r i g a n j i l b e r l a k u :
f (ωt ) =
∑
∞
=1 n
[ Bns i n ( nωt ) ] ( 3 . 4 . a )
Bn =
∫
π
π 0
2
f (ωt ) s i n ( nωt ) d (ωt ) ( 3 . 4 . b )
3 . 1 . 3 S i m e t r i s e t e n g a h g e l o m b a n g
F u n g s i f (ωt ) m e m p u n y a i s i f a t s i m e t r i s e t e n g a h g e l o m b a n g b i l a :
f (ωt ) = - f (ωt ± π)
D e r e t F o u r i e r f u n g s i i n i h a n y a m e n g a n d u n g k o m p o n e n g a n j i l
wt f(wt)
0 2p
-2p
-p p
An =
∫
π
π
2
0
1
f (ωt ) c o s ( nωt ) d (ωt )
An =
∫
− π
π
π 1
f (ωt ) c o s ( nωt ) d (ωt )
An =
∫
− 0
[ 1
π
π f (ωt ) c o s ( nωt ) d (ωt ) +
∫
π
0
f (ωt ) c o s ( nωt ) d (ωt ) ]
M i s a l k a n i n t e g r a l p e r t a m a r u a s k a n a n s a m a d e n g a n F d a n d e n g a n m e n g a m b i l ωt = σ - π m a k a i n t e g r a l p e r t a m a r u a s k a n a n d a p a t d i u r a i k a n m e n j a d i :
F =
∫
− 0
π
f (ωt ) c o s ( nωt ) d (ωt )
=
∫
π
0
f (σ-π) c o s [ ( nσ-π) ] d (σ)
=
∫
π
0
- f (σ) [ c o s ( nσ) c o s ( nπ) + s i n ( nσ) s i n ( nπ) ] d (σ)
M e n g i n g a t s i n ( nπ) = 0 m a k a d i d a p a t :
F = - c o s ( nπ)
∫
π
0
26 K e m u d i a n d i m a s u k k a n l a g i k e d a l a m k o e f i s i e n An d i d a p a t :
An = π
1
[ 1 – c o s ( nπ) ]
∫
π
0
f (ωt ) c o s ( nωt ) d (ωt )
F a k t o r [ 1 – c o s ( nπ) ] m e n u n j u k k a n b a h w a An = 0 b i l a n g e n a p , s e h i n g g a d i d a p a t :
An = π
2
∫
π0
f (ωt ) c o s ( nωt ) d (ωt ) , n g a n j i l
= 0 , n g e n a p ( 3 . 5 )
D e n g a n p e r h i t u n g a n y a n g s a m a d i d a p a t :
Bn = π
2
∫
π0
f (ωt ) s i n ( nωt ) d (ωt ) , n g a n j i l
= 0 , n g e n a p ( 3 . 6 )
3 . 2 A n a l i s i s B e n t u k T e g a n g a n K e l u a r a n
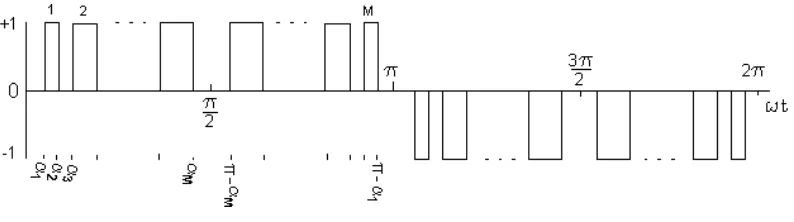
G a m b a r 3 . 4 B e n t u k t e g a n g a n k e l u a r a n i n v e r t e r
K a r e n a g e l o m b a n g b e r s i f a t s i m e t r i g a n j i l d a n s i m e t r i s e t e n g a h p e r i o d e , m a k a k o e d i s i e n A0 = 0 , An = 0 , d a n u n t u k n g e n a p k o e f i s i e n Bn = 0 . S e h i n g g a d e r e t F o u r i e r u n t u k g e l o m b a n g t e r s e b u t d a p a t d i n y a t a k a n s e b a g a i b e r i k u t :
f (ωt ) =
∑
∞
=1 n
Bn s i n ( nωt )
Bn = π
2
∫
π0
f (ωt ) s i n ( nωt ) d (ωt ) , n g a n j i l
G e l o m b a n g t e r s e b u t d a p a t d i b u a t s i m e t r i s e p e r e m p a t g e l o m b a n g s e h i n g g a k o e f i s i e n Bn m e n j a d i :
Bn = π
4
∫
/2 0 πf (ωt ) s i n ( nωt ) d (ωt ) , n g a n j i l
28 - U n t u k M g e n a p
Bn = π 4 [
∫
2 1 α αs i n ( nωt ) d (ωt ) +
∫
43
α
α
s i n ( nωt ) d (ωt )
+ . . . +
∫
− M M α α 1s i n ( nωt ) d (ωt ) ]
D e n g a n m e n g h i t u n g i n t e g r a l d i a t a s d i d a p a t :
Bn = π n 4
∑
= + − M i i 1 1 ) 1( c o s ( nαi) , i = 1 , 2 , 3 , … , M
- U n t u k M g a n j i l
Bn = π 4 [
∫
2 1 α αs i n ( nωt ) d (ωt ) +
∫
43
α
α
s i n ( nωt ) d (ωt )
+ . . . +
∫
2 / π
αM
s i n ( nωt ) d (ωt ) ]
D e n g a n m e n g h i t u n g i n t e g r a l d i a t a s d a n m e n g i n g a t n i l a i c o s ( nπ/ 2 ) = 0 u n t u k n g a n j i l m a k a :
Bn = π n 4
∑
= + − M i i 1 1 ) 1D a r i k e d u a r u m u s t e r s e b u t t e r l i h a t b a h w a u n t u k M g e n a p m a u p u n g a n j i l d i d a p a t r u m u s y a n g s a m a s e h i n g g a t e g a n g a n k e l u a r a n i n v e r t e r d a p a t d i n y a t a k a n d e n g a n p e r s a m a a n m a t e m a t i k b e r i k u t i n i :
f (ωt ) =
∑
∞=1 n
Bn s i n ( nωt ) ( 3 . 7 . a )
d e n g a n : Bn =
π
n
4
∑
=+
−
M
i
i
1
1
) 1
( c o s ( nαi) ( 3 . 7 . b )
i = 1 , 2 , 3 , … , M n = 1 , 3 , 5 , …
d a n b e s a r s u d u t k o m u t a s i m e m e n u h i k o n d i s i b e r i k u t : 0 < α1 < α2 … < αM < π/ 2 .
3 . 3 H a r m o n i s a T e g a n g a n K e l u a r a n
D a r i p e n u r u n a n b e n t u k t e g a n g a n k e l u a r a n d i a t a s t e r l i h a t b a h w a h a r m o n i s a y a n g m u n c u l h a n y a h a r m o n i s a o r d e g a n j i l . B e s a r h a r m o n i s a n y a m e r u p a k a n f u n g s i αi d a n j u m l a h p u l s a s e t e n g a h p e r i o d e ( M ) . U n t u k m e m b e r i g a m b a r a n b e s a r n y a h a r m o n i s a d i a m b i l c o n t o h g e l o m b a n g d e n g a n d u a b u a h p u l s a u n t u k s e t e n g a h p e r i o d e d a n n i l a i αi t e r t e n t u .
- U n t u k n i l a i α1 = 3 0o d a n α2 = 6 0o
30
O r d e H a r m o n i s a
( n )
H a r g a M u t l a k A m p l i t u d e
H a r g a M u t l a k A m p l i t u d e ( % g e l .* ) d a s a r )
1 0 . 4 7 1 0 0 . 0 3 0 . 4 2 9 1 . 1 5 0 . 3 5 7 4 . 6 7 0 . 2 5 5 3 . 3 9 0 . 1 4 3 0 . 4
1 1 0 . 0 4 9 . 1
1 3 0 . 0 4 7 . 7
1 5 0 . 0 8 1 8 . 2 1 7 0 . 1 0 2 2 . 0 1 9 0 . 0 9 1 9 . 6 2 1 0 . 0 6 1 3 . 0 * ) g e l . = g e l o m b a n g
Tabel 4 Amplitude harmonisa dengan sudut komutasi 30o dan 60o
- U n t u k n i l a i α1 = 1 5 . 4 2o d a n α2 = 8 7 . 4 0o
D e n g a n c a r a y a n g s a m a d i p e r o l e h a m p l i t u d e g e l o m b a n g d a s a r d a n h a r m o n i s a s e p e r t i p a d a T a b e l 5 .
O r d e H a r m o n i s a
( n )
H a r g a M u t l a k A m p l i t u d e
H a r g a M u t l a k A m p l i t u d e ( % g e l .* ) d a s a r )
1 1 . 1 7 1 0 0 . 0 3 0 . 3 5 3 0 . 0
5 0 . 0 0 0 . 0
7 0 . 0 0 0 . 0
9 0 . 1 6 1 3 . 9
1 1 0 . 0 6 5 . 0
1 3 0 . 1 5 1 2 . 5
1 5 0 . 0 0 0 . 0
1 7 0 . 0 6 5 . 3
1 9 0 . 0 8 6 . 0
2 1 0 . 0 0 0 . 0
* ) g e l . = g e l o m b a n g
Tabel 5 Amplitude harmonisa dengan sudut komutasi 15.42o dan 87.40o
h a r m o n i s a y a n g a k a n d i h i l a n g k a n m a k i n b a n y a k p u l a j u m l a h p u l s a u n t u k s e t e n g a h p e r i o d e .
P a d a i n v e r t e r p e r l u d i b u a t g e l o m b a n g t e g a n g a n k e l u a r a n y a n g t i d a k m e m p u n y a i h a r m o n i s a k a r e n a h a r m o n i s a t e r s e b u t d a p a t m e n g a k i b a t k a n p e m a n a s a n t a m b a h a n p a d a m e s i n y a n g m e n d a p a t t e g a n g a n d a r i i n v e r t e r a t a u d a p a t m e n y e b a b k a n g a n g g u a n i n t e r f e r e n s i b a g i p e r a l a t a n t e l e k o m u n i k a s i . H a r m o n i s a t e r s e b u t d a p a t d i h i l a n g k a n d e n g a n m e n g g u n a k a n f i l t e r a t a u m e n g g u n a k a n t e k n i k p e n g h i l a n g a n h a r m o n i s a .
32
B A B 4
TEKNIK PENGHILANGAN HARMONISA PADA INVERTER SATU FASA DENGAN MIKROPROSESOR SEBAGAI PEMBANGKIT SINYAL KENDALI
P a d a B a b 3 t e l a h d i t u r u n k a n p e r s a m a a n m a t e m a t i k b e n t u k
t e g a n g a n k e l u a r a n i n v e r t e r s a t u f a s a k o n f i g u r a s i j e m b a t a n
p e n u h . B e r d a s a r k a n p e r s a m a a n 3 . 7 . b d a p a t d i b u a t g e l o m b a n g
d e n g a n m e n g h i l a n g k a n h a r m o n i s a t e r t e n t u s e r t a m e n g e n d a l i k a n
g e l o m b a n g d a s a r . T e k n i k i n i d i s e b u t t e k n i k p e n g h i l a n g a n
h a r m o n i s a .
S e t e l a h d i t e n t u k a n h a r m o n i s a y a n g a k a n d i h i l a n g k a n d a n
b e s a r g e l o m b a n g d a s a r , d a p a t d i s u s u n p e r s a m a a n n o n l i n e a r
s i m u l t a n d e n g a n v a r i a b e l s u d u t k o m u t a s i α. U n t u k m e n g h i t u n g
n i l a i α p a d a p e r s a m a a n t e r s e b u t d i g u n a k a n m e t o d e n u m e r i k
d e n g a n i t e r a s i N e w t o n R a p h s o n . D a r i n i l a i α y a n g d i p e r o l e h
d a p a t d i b u a t p o l a g e l o m b a n g P W M y a n g d i h a r a p k a n .
T e k n i k p e n g h i l a n g a n h a r m o n i s a i n i d a p a t m u d a h
d i w u j u d k a n d e n g a n a d a n y a t r a n s i s t o r d a y a s e b a g a i k o m p o n e n
d a y a y a n g m e m p u n y a i k e c e p a t a n k o m u t a s i t i n g g i d a n d e n g a n
a d a n y a m i k r o p r o s e s o r u n t u k p e m b a n g k i t s i n y a l k e n d a l i .
4 . 1 M e t o d e N e w t o n R a p h s o n u n t u k M e n g h i t u n g S u d u t K o m u t a s i
S e b e l u m m e n g h i t u n g s u d u t k o m u t a s i , p e r l u d i b a h a s d a h u l u
m e t o d e i t e r a s i N e w t o n R a p h s o n u n t u k m e n y e l e s a i k a n p e r s a m a a n
S i s t e m p e r s a m a a n n o n l i n e a r d e n g a n M b u a h v a r i a b e l d a p a t
d i n y a t a k a n s e b a g a i b e r i k u t :
f1(α1,α2, … ,αM) = y1
f2(α1,α2, … ,αM) = y2
. .
. .
. .
fM(α1,α2, … ,αM) = yM ( 4 . 1 )
U n t u k m e n y e l e s a i k a n p e r s a m a a n d i a t a s d e n g a n m e t o d e N e w t o n
R a p h s o n d i a m b i l p e r k i r a a n n i l a i a w a l α y a i t u :
α( 0 ) = [α1( 0 ) α2( 0 ) … αM( 0 )]
M i s a l ∆α1,∆α2, … ,∆αM a d a l a h k o r e k s i y a n g d i p e r l u k a n u n t u k
α1( 0 ),α2( 0 ), … ,αM( 0 ), m a k a p e r s a m a a n 4 . 1 d a p a t d i t u l i s k a n
k e m b a l i m e n j a d i :
f1(α1( 0 )+∆α1, α2( 0 )+∆α2, … , αM( 0 )+∆αM) = y1
f2(α1 ( 0 )
+∆α1, α2 ( 0 )
+∆α2, … , αM ( 0 )
+∆αM) = y2
. .
. .
. .
fM(α1 ( 0 )
+∆α1, α2 ( 0 )
+∆α2, … , αM
( 0 )
+∆αM) = yM ( 4 . 2 )
S e t i a p p e r s a m a a n d i a t a s d a p a t d i u r a i k a n d e n g a n d e r e t T a y l o r .
34
f1(α1( 0 )+∆α1, α2( 0 )+∆α2, … , αM( 0 )+∆αM) =
f1(α1( 0 ),α2( 0 ), … ,αM( 0 )) +∆α1 0
1 1
α ∂
∂f +∆α
2 0
2 1
α ∂
∂f + … +∆α
M 1 0
M f α ∂ ∂ +Φ 1
d e n g a n Φ1 a d a l a h t u r u n a n p a r s i a l d e n g a n o r d e y a n g l e b i h t i n g g i .
J i k a t u r u n a n p a r s i a l d e n g a n o r d e y a n g l e b i h t i n g g i d i a b a i k a n
a k a n d i p e r o l e h p e r s a m a a n l i n e a r d a l a m b e n t u k m a t r i k s s e b a g a i
b e r i k u t .
y1 – f1(α1( 0 ),α2( 0 ), … ,αM( 0 )) 0
1 1 α ∂ ∂f 0 2 1 α ∂
∂f …
0 1 M f α ∂ ∂ ∆α 1
y2 – f2(α1( 0 ),α2( 0 ), … ,αM( 0 )) 0
1 2 α ∂ ∂f 0 2 2 α ∂
∂f …
0 2 M f α ∂ ∂ ∆α 2 … … … . = … … … . . …
yM – fM(α1 ( 0 )
,α2 ( 0 )
, … ,αM
( 0 )
) 0 1
α ∂
∂fM 0 2
α ∂
∂fM …
0 M M f α ∂ ∂ ∆α M
( 4 . 3 )
M a t r i k s b u j u r s a n g k a r t u r u n a n p a r s i a l d i n a m a k a n J a c o b i a n [ J ] .
U n t u k m e n g h i t u n g n i l a i ∆αi p a d a p e r s a m a a n l i n e a r t e r s e b u t
d a p a t d i g u n a k a n m e t o d e e l i m i n a s i G a u s s J o r d a n( 2 6 ). P r o s e s d a p a t
d i u l a n g d e n g a n n i l a i αi b a r u y a n g d i p e r o l e h d a r i :
αi ( 1 )
= αi ( 0 )
+ ∆αi
s e h i n g g a αi s e s u a i d e n g a n k e t e l i t i a n y a n g d i i n g i n k a n (ε) . J i k a
t e r n y a t a m e t o d e i n i d i v e r g e n , m a k a p e r l u d i b u a t p e r k i r a a n n i l a i
B e r d a s a r k a n m e t o d e N e w t o n R a p h s o n t e r s e b u t d a p a t
d i h i t u n g s u d u t k o m u t a s i t e g a n g a n k e l u a r a n i n v e r t e r d e n g a n
m e n g h i l a n g k a n h a r m o n i s a t e r t e n t u s e r t a m e n g a t u r g e l o m b a n g
d a s a r n y a . A m b i l fi(α) a d a l a h n i l a i Bn p a d a P e r s a m a a n 3 . 7 . b .
s e d a n g k a n n i l a i y1 m e n y a t a k a n a m p l i t u d e g e l o m b a n g d a s a r y a n g
d a p a t d i a t u r b e s a r n y a .
0 < y1 < 4 /π
U n t u k i n v e r t e r s a t u f a s a , h a r m o n i s a y a n g a k a n d i h i l a n g k a n
a d a l a h h a r m o n i s a o r d e r e n d a h 3 , 5 , 7 , … , ( 2 M - 1 ) s e h i n g g a
h a r g a y2, y3, … , yM = 0 . P e r s a m a a n n o n l i n e a r u n t u k m e n e n t u k a n
s u d u t k o m u t a s i d a p a t d i n y a t a k a n s e b a g a i b e r i k u t :
f1(α) = π 4
∑
= + − M i i 1 1 ) 1( c o s (αi) = y1
f2(α) = π 3 4
∑
= + − M i i 1 1 ) 1( c o s ( 3αi) = 0
f3(α) = π 5 4
∑
= + − M i i 1 1 ) 1( c o s ( 5αi) = 0
. .
. .
. .
fM(α) =
π ) 1 2 ( 4 −
M
∑
=+ − M i i 1 1 ) 1
( c o s [ ( 2 M - 1 )αi] = 0
( 4 . 4 )
S e d a n g k a n J a c o b i a n y a n g m e r u p a k a n m a t r i k s b u j u r s a n g k a r ,
36
−
±
−
−
−
±
−
±
−
=
]
)
1
2
sin[(
4
.
.
.
]
)
1
2
sin[(
4
]
)
1
2
sin[(
4
.
.
.
.
.
.
)
3
sin(
4
.
.
.
)
3
sin(
4
)
3
sin(
4
)
sin(
4
.
.
.
)
sin(
4
)
sin(
4
]
[
2 1 2 1 2 1 M M MM
M
M
J
α
π
α
π
α
π
α
π
α
π
α
π
α
π
α
π
α
π
( 4 . 5 )
E l e m e n m a t r i k s p a d a k o l o m t e r a k h i r b e r t a n d a p o s i t i p j i k a
j u m l a h M g a n j i l d a n b e r t a n d a n e g a t i p j i k a M g e n a p . D a r i
P e r s a , a a m 4 . 3 , P e r s a m a a n 4 . 4 , d a n P e r s a m a a n 4 . 5 d a p a t d i b e n t u k
p e r s a m a a n l i n e a r s e b a g a i b e r i k u t :
∆ ∆ ∆ − ± − − − ± − ± − = − − − − − − ∑ ∑ ∑ = + = + = + 1 2 1 2 1 2 1 2 1 1 1 1 1 1 1 1 ... ... ... ] ) 1 2 sin[( 4 ... ] ) 1 2 sin[( 4 ] ) 1 2 sin[( 4 . . . . . . ) 3 sin( 4 ... ) 3 sin( 4 ) 3 sin( 4 ) sin( 4 ... ) sin( 4 ) sin( 4 ] ) 1 2 cos[( ) 1 ( ) 1 2 ( 4 . . . ) 3 cos( ) 1 ( 3 4 ) cos( ) 1 ( 4 M M M M M i i i M i i i M i i i M M M M M y α α α α π α π α π α π α π α π α π α π α π α π α π α π
( 4 . 6 )
D a r i P e r s a m a a n ( 4 . 6 ) d a n d e n g a n m e n g g u n a k a n m e t o d e N e w t o n
R a p h s o n , b e s a r s u d u t k o m u t a s i d a p a t d i t e n t u k a n . B a g i a n y a n g
p e r k i r a a n n i l a i a w a l s u d u t k o m u t a s i . P e n e n t u a n n i l a i a w a l i n i
m e r u p a k a n p r o s e s t r i a l a n d e r r o r d a n t i d a k a d a m e t o d e u m u m
y a n g d a p a t m e n j a m i n k o n v e r g e n s i n y a( 2 0 ). N i l a i αi y a n g d i d a p a t
h a r u s m e m e n u h i k o n d i s i i n i
0 < α1 < α2 < . . . < αM < ½π
4 . 2 P r o g r a m K o m p u t e r
A l g o r i t m a y a n g t e l a h d i j a b a r k a n d i a t a s d a p a t d i h i t u n g
d e n g a n m e n g g u n a k a n k o m p u t e r . S e t e l a h b e s a r s u d u t k o m u t a s i
d i p e r o l e h , d i h i t u n g a m p l i t u d e h a r m o n i s a o r d e t i n g g i y a n g m a s i h
a d a s e r t a d i b u a t d a t a u n t u k p o l a g e l o m b a n g y a n g a k a n
d i b a n g k i t k a n . P r o g r a m d i t u l i s d a l a m B a h a s a P a s c a l d a n
d i b e r i k a n p a d a L a m p i r a n A .
P r o g r a m d a p a t d i b a g i m e n j a d i e m p a t b a g i a n , y a i t u :
m e n g h i t u n g s u d u t k o m u t a s i , m e n g h i t u n g a m p l i t u d e h a r m o n i s a ,
m e m b u a t p o l a g e l o m b a n g , d a n p r o g r a m u t a m a . M a s i n g - m a s i n g
b a g i a n t e r d i r i a t a s b e b e r a p a b u a h m o d u l p r o g r a m y a n g
d i n a m a k a n p r o s e d u r . P r o s e d u r i n i a k a n m e m p e r m u d a h d a l a m
m e n g o r e k s i b i l a t e r j a d i k e s a l a h a n d a n m u d a h u n t u k
d i k e m b a n g k a n .
4 . 2 . 1 P r o g r a m u n t u k m e n g h i t u n g s u d u t k o m u t a s i
U n t u k m e n g h i t u n g s u d u t k o m u t a s i , p r o g r a m d i b a g i m e n j a d i
38
- P r o s e d u r H a r g a _ A w a l
P r o s e d u r i n i d i g u n a k a n u n t u k m e m a s u k k a n n i l a i a w a l s u d u t
k o m u t a s i .
- P r o s e d u r H a r g a _ Y
P r o s e d u r H a r g a _ Y d i g u n a k a n u n t u k m e m b e r i k o n d i s i a w a l
b e s a r g e l o m b a n g d a s a r d a n k o n d i s i a w a l h a r m o n i s a o r d e
r e n d a h y a n g a k a n d i h i l a n g k a n .
- P r o s e d u r D e f i n i s i
P r o s e d u r i n i m e n d e f i n i s i k a n p e r s a m a a n 4 . 4 y a n g b e r u p a
p e r s a m a a n n o n l i n e a r d a n m e m b u a t m a t r i k s J a c o b i a n y a n g
m e r u p a k a n t u r u n a n p a r s i a l o r d e p e r t a m a P e r s a m a a n 4 . 4
t e r h a d a p n i l a i s u d u t k o m u t a s i α.
- P r o s e d u r T r a n s f e r
S e t e l a h m e n d e f i n i s i k a n f u n g s i - f u n g s i t e r s e b u t d i a t a s p e r l u
d i b e n t u k m a t r i k s p e r s a m a a n l i n e a r ( P e r s a m a a n 4 . 6 ) d a n
d i b e n t u k d e n g a n p r o s e d u r i n i .
- P r o s e d u r S p l
P r o s e d u r S p l d i g u n a k a n u n t u k m e n y e l e s a i k a n p e r s a m a a n
l i n e a r y a n g t e l a h d i b u a t s e b e l u m n y a .
- P r o s e d u r T u l i s _ A l p h a
P r o s e d u r i n i d i g u n a k a n u n t u k m e n u l i s k a n h a s i l p e r h i t u n g a n
s u d u t k o m u t a s α y a n g d i d a p a t .
4 . 2 . 2 P r o g r a m u n t u k m e n g h i t u n g b e s a r a m p l i t u d e h a r m o n i s a
R u m u s y a n g d i g u n a k a n u n t u k m e n g h i t u n g b e s a r a m p l i t u d e
h a r m o n i s a a d a l a h P e r s a m a a n 3 . 7 . b . B e s a r a m p l i t u d e h a r m o n i s a
s e b e l u m n y a k e d a l a m p e r s a m a a n t e r s e b u t . P r o g r a m i n i d i b a g i
m e n j a d i d u a p r o s e d u r .
- P r o s e d u r H a r m o n i s a
P r o s e d u r i n i m e n d e f i n i s i k a n P e r s a m a a n 3 . 7 . b u n t u k
m e n g h i t u n g Bn y a n g m e r u p a k a n b e s a r a m p l i t u d e g e l o m b a n g
d a s a r d a n b e s a r a m p l i t u d e h a r m o n i s a .
- P r o s e d u r T u l i s _ H a r m o n i s a
P r o s e d u r T u l i s _ H a r m o n i s a d i g u n a k a n u n t u k m e n u l i s k a n
b e s a r a m p l i t u d e h a r m o n i s a y a n g d i p e r o l e h d e n g a n p r o s e d u r d i
a t a s .
4 . 2 . 3 P r o g r a m u n t u k m e m b u a t p o l a g e l o m b a n g
P o l a g e l o m b a n g d i g u n a k a n s e b a g a i s e l a n g w a k t u y a n g
d i i s i k a n p a d a C T C d a r i s i s t e m m i k r o p r o s e s o r p e m b a n g k i t s i n y a l
k e n d a l i . K a r e n a m i k r o p r o s e s o r y a n g d i g u n a k a n m a s u k a n n y a
b e r u p a b i l a n g a n h e k s a d e s i m a l , m a k a p o l a g e l o m b a n g y a n g
d i b u a t j u g a m e n g g u n a k a n b i l a n g a n h e k s a d e s i m a l .
P r o g r a m d i b a g i m e n j a d i t i g a b u a h p r o s e d u r y a i t u :
- P r o s e d u r H e k s a d e s i m a l
P r o s e d u r i n i u n t u k m e n g u b a h b i l a n g a n i n t e r g e r m e n j a d i
b i l a n g a n h e k s a d e s i m a l .
- P r o s e d u r L o o k _ U p _ T a b l e
P r o s e d u r L o o k _ U p _ T a b l e d i g u n a k a n u n t u k m e m b u a t p o l a
g e l o m b a n g d a n m e n g e l u a r k a n h a s i l n y a . N i l a i p o l a g e l o m b a n g
i n i m e r u p a k a n s e l i s i h n i l a i s u d u t k o m u t a s i d i k a l i k a n b i l a n g a n
40
M u l a i
B u k a F i l e P e n yi mp a n H a s i l H a s i l
A mb i l j u ml a h p u l s a A mb i l n i l a i a w a l αi
y1 = 1
yi = 0 , i≠1
H i t u n g fi
H i t u n g J a c o b i a n
H i t u n g ∆αi
p a d a p e r s a ma a n l i n i e r
T i d a k ∆αi ≤ ε
αi ( k + 1 )
= αi ( k )
+∆αi
Y a
C e k j u ml a h i t e r a s i y1 = y1 – 1 / 1 0 0
d i v e r g e n S i mp a n αi
S t o p y1 ≤ 0
T i d a k
Y a
T u l i s αi
H i t u n g A mp l i t u d e H a r mo n i s a
T u l i s A mp l i t u d e H a r mo n i s a
H i t u n g P o l a g e l o mb a n g
T u l i s P o l a g e l o mb a n g
S t o p
B i l a n g a n 3 7 3 d i d a p a t b e r d a s a r k a n c l o c k s i s t e m m i k r o p r o s e s o r
y a n g d i p a k a i s e b a g a i p e m b a n g k i t s i n y a l k e n d a l i . F r e k u e n s i
c l o c k 1 . 7 9 M H z d i b a g i d e n g a n b i l a n g a n 4 8 m e n g g u n a k a n
t i m e r C T C m e n j a d i 3 7 . 3 k H z . S u p a y a d i p e r o l e h f r e k u e n s i
g e l o m b a n g k e l u a r a n i n v e r t e r 5 0 H z a t a u f r e k u e n s i s e t e n g a h
g e l o m b a n g s e b e s a r 1 0 0 H z m a k a p e r l u d i b a g i d e n g a n b i l a n g a n
3 7 3 .
4 . 2 . 4 P r o g r a m U t a m a
P r o g r a m i n i d i g u n a k a n u n t u k m e n g o r g a n i s a s i p r o s e d u r
-p r o s e d u r y a n g t e l a h d i b u a t . L o g i k a -p r o g r a m u t a m a d i t a m -p i l k a n
p a d a G a m b a r 4 . 1 . H a s i l p e r h i t u n g a n k e s e l u r u h a n d i s i m p a n d a l a m
f i l e . S u p a y a t a m p i l a n h a s i l n y a c u k u p b a g u s , p e r l u p r o s e d u r
b a n t u .
- P r o s e d u r B u k a _ F i l e
P r o s e d u r i n i u n