SIMULASI AUTO-TUNING PID CONTROLLER UNTUK MOTOR DC
MENGGUNAKAN METODE MULTIPLE INTEGRATIONS
Endra
1; Linawati
2; Nunika Marta
3; Rafiqa Zubaida
41Jurusan Sistem Komputer, Fakultas Ilmu Komputer, Universitas Bina Nusantara
Jalan K.H. Syahdan No. 9, Palmerah, Jakarta Barat 11480 [email protected]
ABSTRACT
This research analyses an auto-tuning PID controller using multiple integrations method. The purpose of the research is to analyse the ability of auto-tuning PID controller in using multiple integrations method as a method that able to find PID parameter to reach magnitude optimum kriterion; a condition where a closed-loop magnitude frequency response equals onr and output response using software. The research is done towards two waves references that are step and square wave with motor DC characteristics equation as an object arranged so responses suit reference wave. The research method uses literature study and simulation. The result from simulation of auto-tunning PID controller using multiple integrations method in DC motor based on parameter K, Ti, and Td in steady state error avarage points are 0,02 from reference wave.
Keywords: Auto-tuning PID controller, multiple integrations, motor DC, magnitude optimum
ABSTRAK
Penelitian ini menganalisa sebuah auto-tuning kontrol PID menggunakan metode multiple
integrations. Tujuan dari penelitian ini adalah untuk menganalisa kemampuan auto-tuning kontrol
PID menggunakan metode multiple integrations sebagai suatu metode yang mampu mencari parameter PID untuk mencapai magnitude optimum kriterion yaitu kondisi di mana closed-loop frekuensi magnitudo respon sama dengan satu dan respon output dengan menggunakan software. Penelitian dilakukan terhadap dua buah sinyal referensi yaitu sinyal step dan sinyal kotak dengan persamaan karakteristik motor dc sebagai objek yang diatur agar respon sesuai dengan sinyal referensi. Metode penelitian ini menggunakan studi pustaka dan simulasi. Hasil yang diperoleh dari simulasi auto-tuning kontrol PID menggunakan metode multiple integrations pada motor DC yaitu nilai parameter-parameter K, Ti dan Td dengan nilai rata-rata steady state error sebesar 0.02 dari sinyal referensi.
PENDAHULUAN
Pengendalian dengan kontroler PID sering digunakan dalam dunia industri untuk mengendalikan berbagai proses yang ada. Dimana dalam proses industri, sistem-sistem yang dikendalikan saling berhubungan antara satu dengan yang lainnya. Perubahan yang terjadi dalam sistem akan dapat mempengaruhi proses secara keseluruhan. Kontrol PID merupakan komponen umpan balik dengan metode yang menggunakan tiga aksi yaitu proporsional, integral dan derivatif. Dalam suatu sistem, kontrol PID akan memanipulasi variabel input berdasarkan selisih eror dari umpan balik agar dihasilkan variabel input baru yang sesuai untuk sistem sehingga menghasilkan output yang optimum. Penelitian ini dilakukan untuk menganalisa suatu metode auto-tuning kontrol PID menggunakan algoritma multiple integrations. Auto-tuning untuk kontrol PID yang paling pertama adalah The Ziegler-Nichols Tuning (Ziegler & Nichols, 1942). Variasi dari metode
tuning PID masih dikembangkan.
Secara umum metode dapat dibagi menjadi 2, yaitu metode tuning direct dan metode
tuning indirect. Metode tuning direct tidak membutuhkan sebuah model proses, sedangkan metode tuning indirect menghitung parameter kontrol dari identifikasi model pada proses yang terjadi.
Metode multiple integrations (Rake, 1987; Strejc, 1959) adalah penggunaan proses implisit identifikasi pada area, dihitung menggunakan multiple integrations dari proses respon opened-loop; secara langsung digunakan untuk menghitung parameter-parameter control daripada untuk proses identifikasi (Nishikawa et al, 1984; Voda & Landau, 1995) yang biasanya disebut magnitude
optimum (Astrom & Hagglund,1995; Hanus, 1975; Kessler, 1955; Umland & Safiuddin, 1990).
Simulasi pengaturan pergerakan motor DC menggunakan auto-tuning control PID dengan metode
multiple integrations dan software MATLAB sebagai interface untuk melakukan proses simulasi
dengan memberikan nilai-nilai parameter motor DC dan sinyal referensi berupa sinyal step, sinyal kotak dan sinyal noise. Tujuan dari penelitian ini adalah untuk mempelajari prinsip auto-tuning dan menganalisa kemampuan Auto-tuning control PID menggunakan metode multiple integrations. Manfaat hasil penelitian ini adalah menghasilkan parameter control PID untuk mencapai magnitude
optimum sehingga respon dari motor DC dapat mendekati sinyal referensi.
PEMBAHASAN
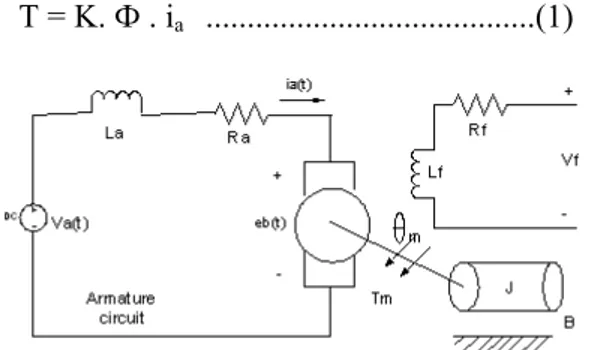
Motor DC
Torsi yang dihasilkan berbanding lurus dengan besarnya arus pada kumparan dan berbanding lurus dengan besarnya fluks pada medan magnetik. Hubungan antara torsi yang dihasilkan, fluks konstan, dan arus adalah sebagai berikut:
T = K. Ф . ia ...(1)
Keterangan:
Ra = tahanan armature (ohm)
La = induktansi armature (henry)
Va = Tegangan armature (volt)
ia = arus armature (ampere)
if = arus medan magnet (ampere)
eb = gaya gerak listrik balik (volt)
θ = perpindahan sudut dari poros motor (radian) Tm = torsi yang diberikan oleh motor (NM) J = momen inersia (s2/rad)
B = koefisien gesekan viskos
Gambar 2 Blok diagram motor DC
Persamaan matematika dari motor DC (dalam transformasi laplace) yang diturunkan dari gambar 2 yaitu: = ) ( ) ( s V s a θ b a a a a a a k k B R B L J sR J L s s k . ) ( 2 + + + + ………(2)
Kontroler
Kontroler Proportional
Keluaran kontroler proposional adalah perkalian antara konstanta proposional dengan nilai errornya.
U(t) = Kp e(t)...(3)
Pada diagram blok kontroler proposional menggambarkan bahwa eror merupakan selisih antara besaran yang diatur dengan besaran sebenarnya yang mempengaruhi kontrol untuk mengeluarkan output yang diinginkan.
Gambar 3 Diagram blok kontroler proporsional
Kontroler Integral
Steady-state error adalah perbedaan akhir diantara analog input atau variabel proses dan
setpoint.
Pada diagram blok kontroler integral menunjukan hubungan antara nilai eror dengan output, kontroler integral membantu menaikan respon sehingga menghasilkan output yang diinginkan.
Gambar 4 Blok diagram kontroler Integral
Kontroler Diferensial
Respon derivatif adalah proporsional terhadap perubahan dari input analog atau variabel proses.
U(t) = Kd . Td . (de(t)/ dt)………..(5)
Pada diagram blok kontroler diferensial yang menggambarkan hubungan antara sinyal error dengan keluaran kontroler.
Gambar 5 Blok diagram kontroler Diferensial
Kontroler PID
Kontroler PID (proportional-integral-derivative) digunakan dalam sebuah sistem dengan
loop tertutup yang melibatkan umpan balik dari output sistem guna mencapai respon yang
diinginkan.
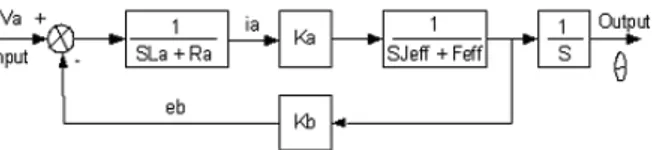
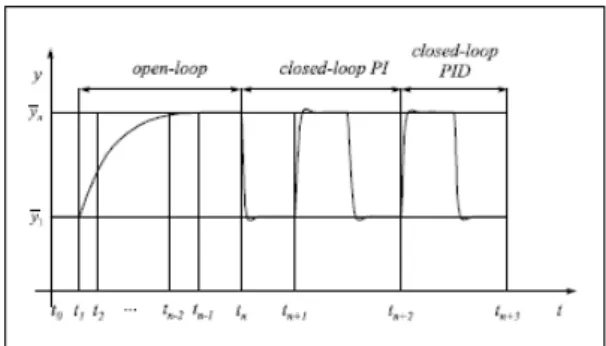
Gambar 6 Grafik Keadaan Sistem Keterangan
Steady state error: variabel kemiringan dari nilai actual state (keadaan sebenarnya).
Rise time: waktu naik yang diperlukan oleh respon untuk mencapai lebih dari nilai biasa yang
didapat. Waktu rise time diperoleh dari respon untuk naik dari 10% menjadi 90% dari nilai akhir.
Settling time: waktu yang diperlukan oleh respon untuk mencapai setengah nilai akhir saat pertama. Overshoot: nilai puncak respon diukur dari satuan yang menunjukkan kestabilan relatif dari sistem.
U(t)= [ Kp . e(t)] + [ ( Kp / Ti ).( t∫0 e(t) dt) ] + [Kp . Td . (de(t)/ dt)]………..…(6)
Metode Auto-Tuning dengan Magnitude Optimum Multiple Integration
Prosedur tuning untuk kontol PID adalah dapat diberikan dengan pendekatan fungsi alih yaitu: sTdel n n m m r PR p as a s a s e s b s b s b K s G − + + + + + + + + = ... 1 ... 1 ) ( 2 2 1 2 2 ...(7)
KPR adalah proses stedy-state dan a1 sampai an dan b1 sampai bm adalah parameter yang
merespon
(
m
≤
n
)
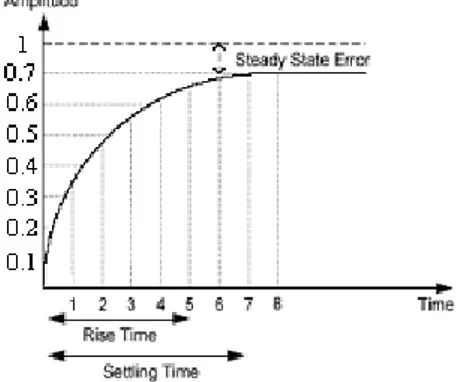
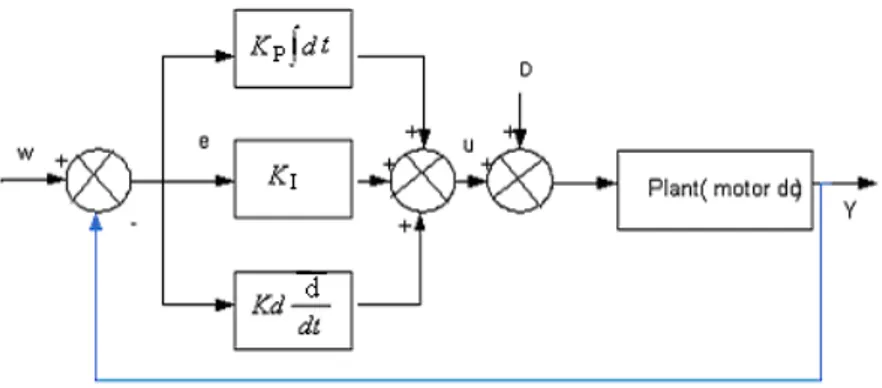
dari proses fungsi alih, dan Tdel merepresentasikan proses time delay.Fungsi alih dari Kontroler PID adalah: ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + + = = d i sT sT K s E s U s Gc 1 1 ) ( ) ( ) ( ...(8) U dan E adalah transformasi laplace pada kontrol output dan kontrol eror (e=w-y). Secara berurutan, parameter kontrol K (penguatan proportional), Ti (konstanta waktu integral), dan Td
(konstanta waktu derivatif). Konfigurasi kontrol PID dalam closed-loop dengan plant, dimana D adalah gangguan.
Gambar 7 Konfigurasi control PID dalam kontrol closed-loop
Proses tuning diatas dilakukan untuk memperoleh sebuah kontrol yang dapat memberikan respon magnitude frekuensi dalam proses closed-loop yang setingkat dengan plant. Syarat yang diperlukan dapat diekspresikan oleh persamaan berikut:
1 ) ( ) ( 1 ) ( ) ( ) ( ) ( ) ( ≈ + = = ω ω ω ω ω ω ω j G j G j G j G j W j Y j G C P C P CL ……….……… (9)
Untuk mendapatkan parameter PI dan control PID berdasarkan kriteria magnitude
optimum, hal pertama yang harus dilakukan adalah dengan mendirikan waktu delay dalam
persamaan (7) ke dalam Taylor series :
. ! 3 ) ( ! 2 ) ( 1 3 2 ⋅ ⋅ ⋅ + − + − = − del del del sT sT sT sT e DEL ………..………(10)
Fungsi alih dalam sistem open-loop dapat diekspresikan sebagai berikut, di mana parameter ci dan di adalah fungsi-fungsi dari fungsi alih:
⋅ ⋅⋅ + + + + ⋅ ⋅⋅ + + + + = 4 3 3 2 2 1 0 3 3 2 2 1 0 ) ( ) ( s c s c s c s c s d s d s d d s G s GC P ……….………...(11)
Di mana parameter ci dan di pada (10) dapat dihitung dari (7) dan (8) serta (10) dan (11)
∑
+∑
= + = − − + = − − 1 2 0 1 2 0 1 2 1 2 ( 1) 2 1 ) 1 ( n i n i n i i i n i idc cc ………...………....…(12)Ketika memasukkan parameter ci dan di dari persamaan (11) maka dapat diperoleh
parameter PID kontroler yaitu:
⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + − − + − + − + + − − + + − ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + − + + − − + − + + − + − = 2 1 1 3 1 1 2 2 1 1 3 2 1 3 2 1 1 2 1 1 2 1 3 1 1 2 2 2 1 1 2 1 3 3 1 2 2 1 2 1 1 2 1 3 1 ) ( 3 ) ( ) ( 2 6 ) ( 2 ) ( 2 del d del del del PR del del del T b a T T b a T b a T b b b a b a a a b a K T b a T b a b a a T b a b a a a b a b a a K …...………...……..………...….(13) ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ + − − + − + + − − ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + − + + − − + − + + − + − = ) ( 2 ) ( 6 ) ( 2 ) ( 2 1 1 2 1 1 2 2 1 1 2 1 3 1 1 2 2 2 1 1 2 1 3 3 1 2 2 1 2 1 1 2 1 3 1 del d del del del del del i T b a T T b a T b a b a a T b a T b a b a a T b a b a a a b a b a a T ...……….………...…….(14) ) , , ( 1 5 1 5 del d f a a b b T T = ⋅ ⋅⋅ ⋅ ⋅⋅ …...………..………..(15)
Untuk menggunakan metode ini kedalam sebuah aplikasi, diperlukan identifikasi parameter-parameter KPR, a1, a2, a3, a4, a5, b1, b2, b3, b4, b5, dan Tdel dari fungsi alih.
Parameter-parameter tersebut diperoleh dari hasil pengukuran pada keadaan asli. Masalah utama yang akan dihadapi yaitu didapatkannya hasil pengukuran yang sama dengan yang digunakan pada keadaan sebenarnya. Untuk menghindari masalah tersebut, digunakan solusi dengan metode multiple
integrations. Metode ini dapat diekspresikan dengan mengintegralkan proses open-loop model step-response (y(t)), setelah memasukkan step-change ΔU pada proses input. Proses integrasi
ditunjukkan pada saat proses mulai memasuki proses closed-loop dengan waktu interval t = [t0,t1].
( )
KPR(
a b Tdel)
y A1= 1 ∞ = 1− 1+ ………...…...…………...…(16) ( ) 1 1 2 1 2 2 2 2 2! Aa T b T a b K y A del del PR + ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ + − − = ∞ = ………...………...(17) ( ) ( ) ( ) ( ) i k i k k i k i k i del k k k k PR k K i Aa b T b a K y A − + − = = − + − +∑
+∑
− ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − + − = ∞ = 1 1 1 1 1 1 1 ) 1 ( ! 1 1 …...(18)dari persamaan diatas maka didapatkan daerah fungsi dari
y
1(
t
)
−
y
5(
t
)
:U y t y t y Δ − = () (0) ) ( 0 ………...………..…....…………...(19) [K y τ d]τ t y t o PR
∫
− = 0 1() ( ) ………...………....………...(20) [ ]∫
− − − =t k k k t A y d y 0 1 1 ( ) ) ( τ τ………...………...………..….…(21)Berikut merupakan grafik representasi dari luas daerah A1 sampai A3 berdasarkan
persamaan-persamaan di atas:
Gambar 8 Area integrasi A1 sampai A2
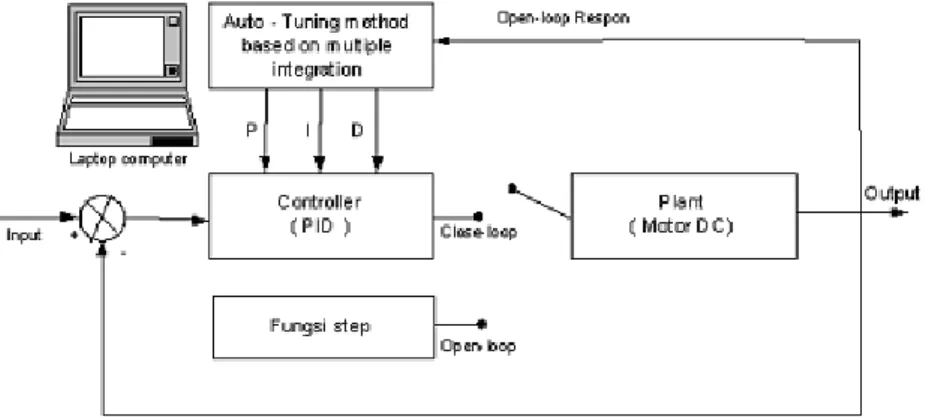
Perancangan awal dari sistem yang dibangun adalah implementasi auto-tuning PID kontroler menggunakan multiple integrations ke dalam software dengan menggunakan program MATLAB. Blok diagram dibawah menunjukkan media implementasi yang digunakan dalam merancang sistem ini.
Gambar 9 Blok Diagram Sistem
Sistem pada Gambar 9 terbagi menjadi 2 proses yaitu proses open loop dan proses
closed-loop. Proses pertama adalah proses open-loop, input diberikan fungsi step masuk kedalam plant
yaitu motor DC kemudian merespon loop yang dihasilkan di-feedback. Pertama, respon
open-loop masuk ke dalam proses auto-tuning menggunakan metode multiple integrations sehingga
menghasilkan parameter K, Ti dan Td. Kedua, respon open-loop masuk kembali bersama dengan
input referensi yaitu dapat berupa sinyal step ataupun sinyal kotak masuk ke kontrol kemudian menuju ke plant. Dari parameter K, Ti dan Td yang telah didapatkan, output yang dihasilkan adalah
respon sinyal motor mengikuti sinyal referensi yang diberikan. Proses inilah yang disebut dengan proses close-loop.
Gambar 10 Graphical User interface
Gambar 10 adalah gambar graphical user interface yang dilakukan dalam simulasi yaitu sinyal referensi.
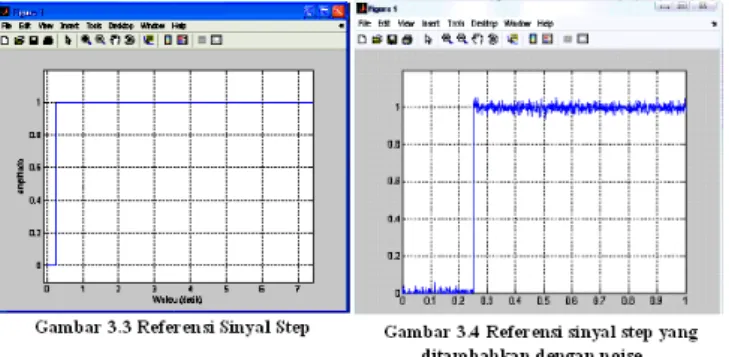
Sinyal referensi
Sinyal referensi yang digunakan disini terdiri dari 4 yaitu sinyal step, sinyal step yang ditambahkan dengan noise, sinyal kotak, dan sinyal kotak yang ditambahkan dengan noise. Dibawah ini adalah gambar-gambar dari sinyal referensi yang digunakan:
Gambar 11 (a) Referensi sinyal step; (b) Referensi sinyal stel yang ditambahkan motor
Noise yang digunakan dalam perancangan simulasi menggunakan jenis White Gaussian Noise. Dalam keadaan nyata, jenis noise ini merupakan gangguan yang diakibatkan oleh kenaikan
suhu (panas). Dalam MATLAB, perintah untuk noise ini digunakan fungsi awgn (add white
gaussian noise). Fungsi wgn menghasilkan matriks numerik yang random dari nilai matriks dan
frekuensi suatu fungsi. Penguatan dari fungsi wgn dapat dinyatakan dalam dBW (decibel Watt), dBm atau unit-unit linear lainnya. Dalam perancangan, nilai frekuensi yang digunakan adalah 20 dBW dan 50 dBW.
Motor DC
Terdiri dari parameter-parameter komponen motor dc yang akan digunakan dalam proses. Parameter- parameter tersebut yaitu L , R , J, b, dan Ke. Dalam perancangan simulasi, motor dc akan diproses menggunakan nilai parameter hambatan (R) dan beban (J) yang berbeda. Hal ini dilakukan dengan asumsi terjadinya perubahan kenaikan suhu pada sistem. Nilai-nilai perubahan pada parameter R diperoleh dari persamaan dibawah dengan adanya batasan yang disebut dengan R
drift:
RE = R0 + α . ΔT ...(22)
Di mana:
R0 = hambatan awal. Asumsi digunakan R0 = 1 Ohm.
RE = hambatan.
α = nilai drift. Asumsi digunakan α = 0,1 Ohm / °C. ΔT = perubahan suhu. Asumsi digunakan = 5 °C.
Sehingga nilai-nilai parameter R yang diperoleh secara berurutan adalah 1 Ohm, 1,5 Ohm, 2 Ohm, 2,5 Ohm, 3 Ohm, 3,5 Ohm dan 4 Ohm. Dengan batasan persentase nilai drift yang digunakan adalah:
% α = α . 100% dimana α = 0,1. % α = 10 %
Output menampilkan nilai – nilai yang dihasilkan oleh proses. Nilai – nilai yang dihasilkan yaitu K, Ti dan
Td. Sementara button exit digunakan untuk keluar dari proses figure.
Algoritma pada Auto-Tuning
Algoritma auto-tuning dibuat dalam program MATLAB untuk menunjukkan kegunaan dari metode tuning pada kontrol auto-tuning yang terdiri dari 4 tahap yaitu:
Tahap pertama: Memasukkan Parameter
Proses inisialisasi diperlukan untuk memulai proses tahap awal. Di mana nilai parameter-parameter yang dimasukkan mempengaruhi proses yang akan dilakukan. Parameter-parameter-parameter tersebut adalah (1) sampling waktu (Ts), yaitu fungsi waktu yang nilainya dapat ditentukan, di
mana frekuensi signal dalam waktu tertentu ini diambil sebagai sampling untuk percobaan; (2) amplitudo dari step-change pada input proses (ΔU), yaitu nilai amplitudo dari perubahan sinyal
input yaitu perubahan amplitudo step-function yang di-setting pada suatu nilai tertentu; (3) nilai
batasan maksimum proportional gain dari kontrol (K), yaitu nilai maksimum penguatan (gain) dari konstanta proportional pada kontroler; (4) aproksimasi waktu konstan dari proses utama (Tmain),
merupakan jarak waktu utama proses berlangsung yang tidak harus bersifat akurat, cukup hanya dengan perkiraan saja.
Tahap kedua: Menjalankan Proses ke Keadaan Tenang (steady state) secara
Manual.
Setelah proses inisialisasi, algoritma akan merubah proses ke mode manual dengan memberikan fungsi step dan proses dijalankan menuju ke keadaan yang diinginkan (desired steady
state). Pada tahap awal ini, fungsi step pada model sistem dalam keadaan terhubung dengan plant,
di mana inputan fungsi step berperan sebagai parameter yang diproses untuk pergerakan plant. Pergerakan plant ini akan memberi respon output pada keadaan steady state awal tanpa mengalami proses feedback sehingga sistem dapat dikatakan berada dalam keadaan open-loop. Ketika output proses dihasilkan, maka step-response dari keadaan open loop dapat ditunjukkan.
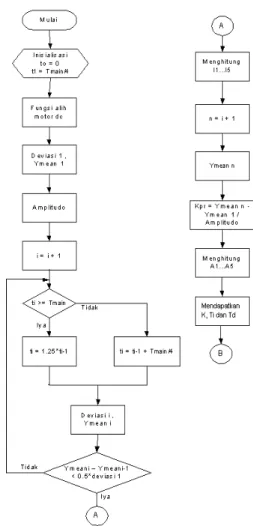
Tahap ketiga: Menunjukkan open-loop step-response.
Sebuah standar deviasi (σ1) dan nilai ymean (y1) dari output proses diukur dengan
menggunakan algoritma rekursif, selama periode 0 < t ≤ t1 = Tmain/4. Kemudian, pada saat 0 < t ≤ t1
= Tmain/4, step-change ΔU yang di-setting untuk input proses. Setelah t = t1, lima proses integral y(t) – y1 dikalkulasi secara rekursif, di mana y(t) menunjukkan output proses.
] , [ ; ) ( ) ( 1 1 1 1 i i t t i i i ytdt yt t t t t t y i i − − = = − =
∫
− ...(23)Waktu t1 ke tn didefinisikan kedalam persamaan berikut:
main i i main i main i i T t t T t T t t ≥ 〈 + = + ; . 25 . 1 ; 4 1 ...(24)
Pada interval waktu ti-1 < t ≤ ti ( i=2...n ), proses standar deviasi menjadi: ∫ − − − = − i i t t i i i i yt y dt t t 1 ) ) ( ( 1 1 σ ………...………...(25) Dan proses nilai mean y1 dikalkulasi secara rekursif. Metode multiple integrations pada proses step-response juga dikalkulasi secara rekursif dari t = t1 dan dihentikan pada saat t = tn-1 ketika
standar deviasi menjadi σn-1 ≤ 2.σ1 atau ketika σn-1 ≤ σmax/ 40, di mana:
1 ... 1 max max − = = n k k σ σ ...(26) Penguatan (gain) steady-state dari proses dikalkulasi pada saat t = tn dalam cara berikut:
U y y K n PR Δ − = 1...(27)
Gambar 15 Flowchart open-loop
Perhitungan daerah sinyal A1 ke A5 :
( ) U I t t K A PR n Δ − − = −1 1 1 1 ………....………….………...(28) ( ) ( ) U I t t K t t A A n PR n +Δ − − − = − − 2 2 1 1 1 1 1 2 2 ………...(29) ( ) ( ) ( ) U I t t K t t A t t A A n PR n n −Δ − + − − − = − − − 3 3 1 1 2 1 1 1 1 1 2 3 2 6 ...(30)
( ) ( ) ( ) ( ) U I t t K t t A t t A t t A A n PR n n n +Δ − − − + − − − = − − − − 4 4 1 1 3 1 1 1 2 1 1 2 1 1 3 4 2 6 24 ...(31) ( ) ( ) ( ) ( ) ( ) U I t t K t t A t t A t t A t t A A n PR n n n n −Δ − + − − − + − − − = − − − − − 5 5 1 1 4 1 1 1 3 1 1 2 2 1 1 3 1 1 4 5 120 24 6 2 ……..…………....….(32) Di mana I1 ke I5 dikalkulasi secara rekursif dengan multiple integrations pada proses step-response:
( )
(
)
∫
− − = 1 1 1 1 n t t y y I τ ...(33)( )
(
)
∫ ∫
− ⎥⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ − = 1 1 1 1 1 2 n t t t d d y y I τ τ τ τ ……….………...…….…(34) ( ) ( )∫ ∫ ∫
− ⎥⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ − = 1 1 3 1 2 1 3 2 1 1 1 3 n t t t t d d d y y I τ τ τ τ τ τ ………...…..……..….(35)( )
(
1 1)
1 2 3 4 4 1 1 4 1 3 1 2 1 τ τ τ τ τ τ τ τ d d d d y y I n t t t t t∫ ∫ ∫ ∫
− ⎥⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ − = ………...……...(36) ( )∫ ∫ ∫ ∫ ∫
− ⎥⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ − = 1 1 4 1 3 1 3 1 2 1 5 4 3 2 1 5 ( ) n t t t t t d d d d d t y y I τ τ τ τ τ τ τ τ τ τ τ ……….…...……….….(37)Di mana proses step-response y(t) diaproksimasi dengan fungsi linear diantara dua sample : ( ) ( ) ( ) ( )( ( )) (k ) t t( )k t k t t T k y k y k y t y s ≤ < − − − − − + − = 1 1 1 1 ………...………...…...……….………(38)
Setelah diperoleh hasil proses gain steady-state KPR dan daerah A1 ke A5, parameter-parameter
PI dan PID kontrol didapatkan dari rumus di bawah ini:
5 1 2 3 5 2 4 3 A A A A A A A Td − − = ………....…...…………(39)
(
2)
1 3 2 1 3 2AA AK T A A K d PR− − = ……….………...…….……(40) 1 2 3 A T A A T d i = − ………...……….(41)Keseluruhan simulasi dari software yang dilakukan mengunakan sofware MATLAB. 7.1 sebagai interface untuk menampilkan hasil penelitian dengan simulasi dan selanjutnya dilakukan analisis terhadap hasil output yang didapatkan. Setelah keseluruhan simulasi dilakukan, selanjutnya dilakukan pengambilan sampel data untuk melihat hasil simulasi dari sistem yang telah dibuat. Simulasi dilakukan dengan menggunakan empat macam sinyal referensi yaitu sinyal step, sinyal step ditambahkan noise, sinyal kotak, dan sinyal kotak ditambahkan dengan noise.
Percobaan pertama dilakukan dengan menggunakan sinyal step dan sinyal step yang ditambahkan dengan noise sebagai sinyal referensi untuk membuktikan apakah sinyal motor mengikuti sinyal referensi yang diberikan. Percobaan dilakukan dengan 2 jenis nilai komponen motor yang berbeda. Nilai R yang diberikan antara 1 ohm – 4 ohm. Nilai komponen motor pertama sebagai berikut:
R = 2,5 Ohm, L = 0,062 Hendry, Ke = 1 Nm/amp, J = 0.00004 Kgm^2/s^2 dan b = 0.001 NMs Tabel 1 Waktu proses open-loop dan closed-loop
percobaan 1 – percobaan 7
Open loop motor t(0) – t(n) 0 – 7,4506
Closed-loop PI t(n) – t(n+2) 7,4506 – 11,6415
Closed-loop PID t(n+2) - t(n+3) 11,6415 – 14,5519 keterangan : n adalah indeks waktu
Gambar 17 (a) Grafik percobaan 1; (b) Grafik percobaan 2 Tabel 2
PI PID
K 651,926 K 651,926
Ti 0,244636s Ti 0,244636s Td 1,77276x 106s
Gambar 18 (a) Grafik percobaan 1; (b) Grafik Percobaan 2
Kemudian percobaan dilanjukan dengan memberikan nilai komponen motor kedua sebagai berikut: R = 4 Ohm, L = 2,75x10-6 Hendry, Ke = 0,0274 Nm/amp, J = 3,2284 x10-6 Kgm^2/s^2 dan b =
3,5077 x10-6 NMs
Gambar 19 (a) Grafik percobaan 3; (b) Grafik percobaan 4 Tabel 3
Gambar 20 (a) Grafik percobaan I; (b) Grafik percobaan 2
PI PID
K 651,926 K 651,926
Ti 0,244636s Ti 0,244636s Td 1,77276x 106s
Percobaan ketiga dilakukan dengan menggunakan referensi sinyal kotak dan sinyal kotak yang ditambahkan dengan noise sebesar 50dB sebagai percobaan dilakukan sebanyak 8 kali, dengan memberikan nilai komponen motor sebagai berikut:
R = 2,5 Ohm, L = 0,062 Hendry, Ke = 1 Nm/amp, J = 0.00004 Kgm^2/s^2 dan b = 0.001 NMs Tabel 4
Open loop motor t(0) – t(n) 0 – 3,8147
Closed-loop PI t(n) – t(n+2) 3,8147 – 5,9605
Closed-loop PID T(n+2) - t(n+3) 5,9605 – 7,4506
Gambar 21 Grafik Percobaan 4 dengan referensi sinyal kotak R = 4 Ohm dan J = 5 Kgm^2/s^2 Tabel 5 PI PID K 333,786 K 333,786 Ti 0,000255288s Ti 0,000255288s Td 445,327s
Tabel 6 Waktu proses open-loop dan closed-loop
Open loop motor t(0) – t(n) 0 – 0,9375
Closed-loop PI t(n) – t(n+2) 0,9375 – 1,5625
Closed-loop PID t(n+2) - t(n+3) 1,5625 – 1,9531
Gambar 23 Grafik Percobaan 7 dengan referensi sinyal kotak yang ditambahkan dengan noise
Tabel 7 Waktu proses open-loop dan closed-loop
Open loop motor t(0) – t(n) 0 – 2,4414
Closed-loop PI t(n) – t(n+2) 2,4414 – 3,8147
Closed-loop PID t(n+2) - t(n+3) 3,8147 – 4,7684
PENUTUP
Simpulan yang dapat diambil dari simulasi auto-tuning control PID untuk motor DC menggunakan metode multiple integrations adalah semua percobaan baik menggunakan referensi sinyal step maupun kotak, sinyal outputnya rata-rata memiliki steady state error sebesar 0,02, sinyal noise yang diberikan pada referensi sinyal step tidak mempengaruhi motor mengikuti referensi yang diberikan, jika semakin besar nilai beban J maka lebih lama waktu yang diperlukan untuk mencapai respon transient, dan metode multiple integrations dapat menyesuaikan sinyal motor sesuai sinyal referensi dan memperoleh nilai parameter K, ti dan td yang sesuai dengan kebutuhan atas nilai karakteristik motor meskipun terdapat adanya sinyal gangguan pada referensi yang menyebabkan keadaan sinyal referensi berubah-ubah.
DAFTAR PUSTAKA
Kreyszig,Erwin. (1999). advanced engineering mathematics. 8th Edision. JOHN WILEY & SONS,INC. ISBN : 0 – 471 – 15496 – 2.
Mellon,Carnegie.Contro lTutorials for Matlab
http://www.engin.umich.edu/group/ctm/examples/motor2/motor.html
Ogata, Katsuhiko. (1981). teknik kontrol automatik. Jilid 1 Edisi 2. Erlangga. ISBN : 979 – 411 – 466 – 9.
Palm, W. (2005). intoduction to matlab 7 for engineers. McGraw-Hill. ISBN : 007 -123266 - 1. Pitowarno,Endra. (2006). ROBOTIKA : desain, control, kecerdasan buatan. Edisi 1. ANDI
Yogyakarta. ISBN : 979 – 763 – 094 – 3.
Sugiharto, Aris. (2006). pemrograman gui dengan matlab. Edisi 1. ANDI Yogyakarta. ISBN : 979 - 763 - 514 – 7.
Thomas Wahyu Dwi Hartanto dan Y.Wahyu Agung Praetyo. (2003). analisis dan desain sistem
kontrol dengan matlab. Edisi II. ANDI Yogyakarta. ISBN : 979 – 731 – 326- 3.
Vrancic,Damir. A New PID Controller Auto-Tuning Method Based On Multiple Integrations. http: //www.e2.ijs.si/People/Damir.Vrancic.html.