1
PERANCANGAN ROBOT OMNIDIRECTIONAL
MENUJU TARGET BERBASIS PRINSIP DEAD RECKONING
EMPAT TETIKUS OPTIK
Rizal Bayu Kurniawan#1, Iwan Setiawan,ST,MT#2, Budi Setiyono,ST,MT#3
#
Jurusan Teknik Elektro, Fakultas Teknik Universitas Diponegoro Jalan Prof Sudharto, Tembalang, Semarang, Indonesia
#2
[email protected]@gmail.com Abstrak — Robotika merupakan bidang ilmu pengetahuan yang
mengalami perkembangan dengan cepat. Selain itu, tingkat kecerdasan robot yang semakin tinggi cenderung meminimalisasikan campur tangan manusia. Untuk dapat bekerja secara otomatis maka suatu robot harus mempunyai 3 buah komponen yaitu input (data masukan yang akan diolah), kecerdasan (suatu algoritma yang menangani pengambilan keputusan yang didasarkan pada masukan) dan output (keputusan yang yang diambil ).
Navigasi robot erat kaitanya dengan mobilitas dari robot tersebut. Mobilitas yang tinggi sangat bermanfaat karena akan mempengaruhi kecepatan robot mencapai target tanpa membuang waktu untuk bermanuver dalam pergerakan robot. Sebuah robot omnidrectional merupakan solusi untuk memecahkan masalah mobilitas karena robot dapat bergerak ke segala arah tanpa memutar badannya. Aspek penting dalam otomatisasi robot adalah teknik membangun peta, kemampuan menghindari halangan, dan lokalisasi posisi robot . Dalam Tugas akhir ini akan dibahas tentang lokalisasi posisi robot dengan misi menuju target menggunakan prinsip dead reckoning sehingga posisi dan orientasi robot bisa diketahui. Sensor yang digunakan berupa tetikus optik berjumlah empat untuk meminimalkan kesalahan pembacaan posisi dan orientasi robot.
Dari hasil pengujian didapatkan bahwa prinsip dead
reckoning dengan empat tetikus optik memiliki presisi data
tinggi yaitu rata-rata kesalahan pada sumbu X positif sebesar 0.44467 cm, sumbu X negatif sebesar 0.956, sumbu Y positif sebesar 0.51, sumbu Y negatif sebesar 0.35467 cm dan rata-rata kesalahan orientasi robot saat dipuatar 90 derajat yaitu sebesar 1.7 derajat serta semakin jauh jarak tempuh robot
omnidirectional, maka semakin besar kesalahan perhitungan
posisi dan orientasi.
Kata Kunci : Omnidirectional, Dead Reckoning, Tetikus Optik,
Omni wheel, Misi Menuju Target
I. PENDAHULUAN
Dewasa ini, salah satu masalah penting dalam perkembangan mobile robot adalah masalah mobilitas robot. Pada umumnya navigasi robot yang sering dijumpai bertipe
ackerman dan diferensial yang memiliki mobilitas rendah.
Hal ini dikarenakan, untuk robot jenis ackerman, bila ingin bergerak ke kiri, maka robot tersebut harus memutar sepasang roda depannya mengarah ke kiri terlebih dahulu kemudian sepasang roda belakang bergerak maju, sehingga diperlukan waktu yang lama untuk berbelok. Jenis lain, jenis diferensial juga demikian, misalnya ingin berbelok ke kiri maka roda kanan lebih cepat daripada roda kiri dan sebaliknya. Oleh sebab itu dikembangkan sebuah robot yang tidak hanya dapat bergerak maju dan mundur tetapi dapat bergerak ke segala arah (omnidirection atau holonomic) dalam bidang kartesian X-Y tanpa perlu memutar badannya. Dengan demikian robot ini akan mempunyai mobilitas yang tinggi [14].
Selain itu, sebuah robot akan memiliki nilai lebih apabila robot mampu bernavigasi secara otomatis (autonomus). Aspek penting dalam navigasi otomatis meliputi teknik membangun sebuah peta, kemampuan menghindari halangan, dan lokalisasi mobile robot [7]. Tugas Akhir ini difokuskan pada pembahasan lokalisasi mobile robot, yang memiliki misi khusus menuju target tertentu. Beberapa sensor yang sering digunakan dalam lokalisasi posisi robot meliputi sensor encoder, sensor jarak, dan kamera[1]. Namun sensor-sensor tersebut masih memiliki kekurangan, yaitu sensor encoder akan mengalami kesalahan perhitungan bila roda robot selip, sensor jarak membutuhkan jarak pandang yang terbatas, kemampuan kepresisian sensor dan sudut pemancaran sensor, serta kamera memiliki kelemahan dalam perhitungan dan pembacaan yang akan memberatkan mikroprosesor [7]. Oleh sebab itu, dalam Tugas akhir ini digunakan tetikus sebagai sensor posisi robot karena keluaran tetikus berupa posisi X dan Y dalam satuan piksel di komputer dengan presisi yang tinggi dan harga relatif murah [9].
Lokalisasi mobile robot merupakan kemampuan memperkirakan posisi dan orientasi mobile robot. Setidaknya untuk dapat memperkirakan posisi dan orientasi robot, suatu robot harus mempunyai dua buah tetikus. Namun, dua buah tetikus rentan memiliki pembacaan yang salah karena kondisi dari lantai dan getaran robot. Oleh sebab itu digunakan empat tetikus untuk meminimalkan kesalahan tersebut [9]. Tetikus yang digunakan berjenis optik sehingga data posisi yang dibaca lebih presisi.
II. DASARTEORI
Dasar teori dari makalah perancangan robot omnidirectional menuju target berbasis prinsip dead reckoning empat tetikus optik mencakup:
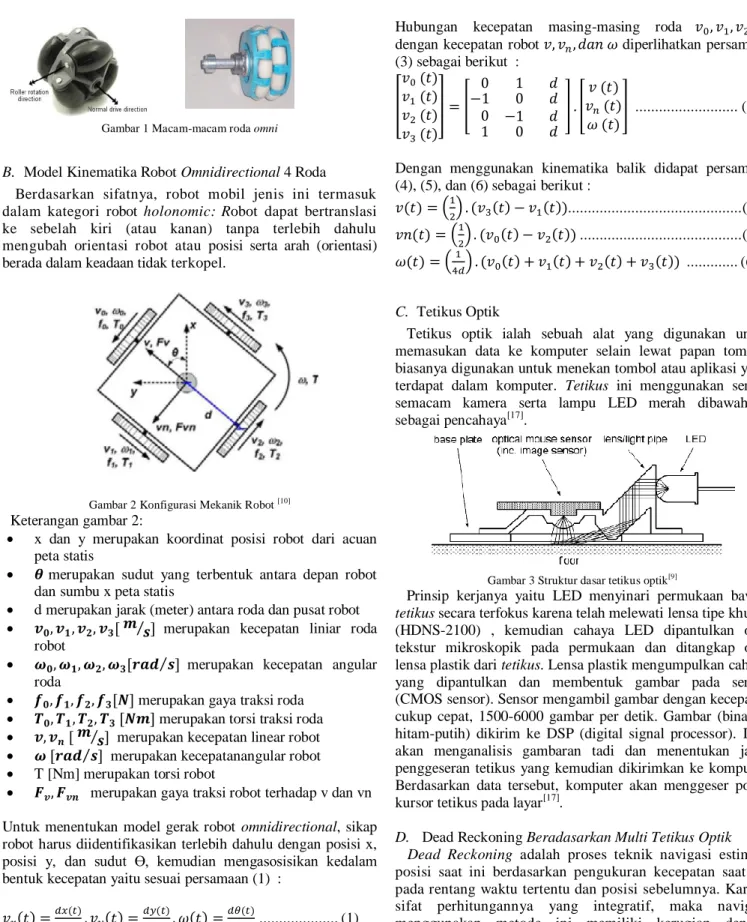
A. Roda Omni[20]
Roda omni adalah roda yang mampu bergerak ke segala arah dalam kurva dua dimensi (X,Y). Hal ini disebabkan karena roda omni memiliki banyak roda kecil dalam satu roda inti (roda besar) yang posisinya saling tegak lurus. Roda inti dapat bergerak maju dan mundur karena memiliki poros yang sama dengan poros motor DC sedangkan roda kecil berfungsi sebagai roda bebas sehingga roda omni mampu bergerak ke kiri dan kanan, tidak seperti roda pada umumnya yang memiliki gaya gesek yang terlalu besar untuk arah kanan dan kiri sehingga bila digeser ke kanan atau kiri susah untuk bergerak. Hal tersebut bisa dilihat dalam gambar 1 yang merupakan beberapa contoh roda omni yang dijual dipasaran.
2
Gambar 1 Macam-macam roda omni
B. Model Kinematika Robot Omnidirectional 4 Roda
Berdasarkan sifatnya, robot mobil jenis ini termasuk dalam kategori robot holonomic: Robot dapat bertranslasi ke sebelah kiri (atau kanan) tanpa terlebih dahulu mengubah orientasi robot atau posisi serta arah (orientasi) berada dalam keadaan tidak terkopel.
Gambar 2 Konfigurasi Mekanik Robot [10]
Keterangan gambar 2:
x dan y merupakan koordinat posisi robot dari acuan peta statis
merupakan sudut yang terbentuk antara depan robot dan sumbu x peta statis
d merupakan jarak (meter) antara roda dan pusat robot
⁄ merupakan kecepatan liniar roda robot
⁄ merupakan kecepatan angular roda
merupakan gaya traksi roda
merupakan torsi traksi roda
⁄ merupakan kecepatan linear robot
⁄ merupakan kecepatanangular robot
T [Nm] merupakan torsi robot
merupakan gaya traksi robot terhadap v dan vn
Untuk menentukan model gerak robot omnidirectional, sikap robot harus diidentifikasikan terlebih dahulu dengan posisi x, posisi y, dan sudut Ɵ, kemudian mengasosisikan kedalam bentuk kecepatan yaitu sesuai persamaan (1) :
( ) ( ) ( ) ( ) ( ) ( ) ... (1)
Persamaan (2) dibawah menunjukan transformasi dari kecepatan linear terhadap acuan peta statis ke bentuk kecepatan linear terhadap acuan robot.
[ ( ) ( ) ( )] [ ( ( )) ( ( )) ( ( )) ( ( )) ] [ ( ) ( ) ( ) ] ... (2)
Hubungan kecepatan masing-masing roda dengan kecepatan robot diperlihatkan persamaan (3) sebagai berikut : [ ( ) ( ) ( ) ( ) ] [ ] [ ( ) ( ) ( )] ... (3)
Dengan menggunakan kinematika balik didapat persamaan (4), (5), dan (6) sebagai berikut :
( ) ( ) ( ( ) ( )) ... (4) ( ) ( ) ( ( ) ( )) ... (5) ( ) ( ) ( ( ) ( ) ( ) ( )) ... (6)
C. Tetikus Optik
Tetikus optik ialah sebuah alat yang digunakan untuk memasukan data ke komputer selain lewat papan tombol, biasanya digunakan untuk menekan tombol atau aplikasi yang terdapat dalam komputer. Tetikus ini menggunakan sensor semacam kamera serta lampu LED merah dibawahnya sebagai pencahaya[17].
Gambar 3 Struktur dasar tetikus optik[9]
Prinsip kerjanya yaitu LED menyinari permukaan bawah
tetikus secara terfokus karena telah melewati lensa tipe khusus
(HDNS-2100) , kemudian cahaya LED dipantulkan oleh tekstur mikroskopik pada permukaan dan ditangkap oleh lensa plastik dari tetikus. Lensa plastik mengumpulkan cahaya yang dipantulkan dan membentuk gambar pada sensor (CMOS sensor). Sensor mengambil gambar dengan kecepatan cukup cepat, 1500-6000 gambar per detik. Gambar (binary / hitam-putih) dikirim ke DSP (digital signal processor). DSP akan menganalisis gambaran tadi dan menentukan jarak penggeseran tetikus yang kemudian dikirimkan ke komputer. Berdasarkan data tersebut, komputer akan menggeser posisi kursor tetikus pada layar[17].
D. Dead Reckoning Beradasarkan Multi Tetikus Optik Dead Reckoning adalah proses teknik navigasi estimasi
posisi saat ini berdasarkan pengukuran kecepatan saat ini pada rentang waktu tertentu dan posisi sebelumnya. Karena sifat perhitungannya yang integratif, maka navigasi menggunakan metode ini memiliki kerugian dengan penambahan error secara kumulatif tiap proses perhitungan, sehingga semakin besar jarak yang ditempuh robot mobil yang bernavigasi menggunakan metode ini, keakuratan nilai posisi yang dihasilkan akan semakin kecil[1].
Namun penggunaan tetikus optik sebagai sensor posisi dalam prinsip dead reckoning akan membantu memaksimalkan keakuratan posisi karena tetikus optik memiliki keakuratan tinggi dalam penentuan posisi tetikus dengan keluaran yang sudah dikalibrasikan ke posisi X dan posisi Y dalam satuan piksel di komputer[7].
3
Pergerakan robot ke arah dua sumbu aksis dapat diukur oleh satu tetikus optik namun untuk mengukur pergerakan robot meliputi gerak translasi dan rotasi minimal harus menggunakan dua tetikus optik .
Gambar 4 Konfigurasi robot dan tetikus[9]
Ilustrasi penempatan dua tetikus optik mi dan mj pada sebuah
robot diperlihatkan pada gambar 4. Koordinat peta statik
( ) ditempatkan pada lantai, koordinat robot ( O – xy) ditempatkan pada titik pusat robot, dan koordinat sistem ( ) dan ( ) ditempatkan pada sensor cahaya yang terdapat pada tetikus optic mi dan mj terhadap acuan robot. Posisi dari masing-masing sensor ditunjukan dengan rumus dan [ ] . Hubungan pergerakan , [ ] yang diukur dari masing-masing sensor dan pergerakan dari titik pusat robot adalah : [ ] [ ] [ ] [ ] ... (7)
[ ] [ ] [ ] [ ] ... (8) Persamaan (7) dan (8) bisa ditulis kedalam bentuk persamaan (9) ... (9) dimana ... (10) [ ] ... (11) [ ] ... (12)
Dimana elemen matriks A dan vektor a ditunjukan dalam Apq
dan ap (p=1,2,3,4;q=1,2,3). Dimana squared error Eij dari
pergerakan robot didefinisikan sebagai :
∑ ( ) ...(13)
Untuk menentukan pergerakan robot yang memiliki nilai minimum dari square error Eij bisa ditunjukan
dalam persamaan berikut :
... (14) Dimana A- merupakan psedeu invers matriks dari A.
Setelah mengetahui matriks u maka rumus dead reckoning dapat ditentukan untuk mendapatkan posisi dan orienatsi robot dari peta global.
[ ] [
] ... (15) Untuk penambahan tetikus optik lagi maka hanya akan merubah rumus di persamaan (9) dengan pola yang sama.
E. Kontrol PD
Pengendali PD adalah suatu sistem pengendali yang merupakan gabungan antara pengendali proporsional dan turunan (derivative). Dalam waktu kontinyu, sinyal keluaran pengendali PD dapat dirumuskan sebagai berikut. [12]
( ) ( ( ) ( ) ) ... (16) atau
( ) ( ) ( ) ... (17) dengan
u(t) = sinyal keluaran pengendali PD
Kp = konstanta proporsional Td = waktu turunan
Kd = konstanta turunan
e(t) = sinyal kesalahan (e(t) = referensi – keluaran plant) Jadi, fungsi alih pengendali PD (dalam domain S) dapat dinyatakan sebagai berikut.
( ) ... (18) Diagram blok pengendali PD dapat dilihat pada Gambar 5.
masukan
+
-U(s) E(s)
Y(s)
Gambar 5 Diagram blok pengendali PD.[12]
Sedangkan dalam kawasan sistem diskret, pengendali PD dapat dituliskan dalam bentuk persamaan beda sebagai berikut.[13]
( ) ( ) ( ( ) ( )) ... (19) Pengetahuan tentang efek yang diakibatkan oleh masing-masing pengendali tersebut yang nantinya akan digunakan dalam penentuan nilai-nilai penguatan proporsional (Kp) dan
derivative (Kd). Tabel basis pengetahuan hubungan antara
penguatan dan efeknya pada pengendali PD diperlihatkan pada Tabel 1.
Tabel 1. Efek dari pengendali P dan D.[12]
Penguatan Tanjakan Waktu Overshoot Penetapan Waktu Kestabilan
Kp Berkurang Bertambah Sedikit
bertambah Menurun Kd Sedikit
berkurang Berkurang Berkurang Meningkat
III. PERANCANGAN
Perancangan alat pada tugas akhir ini meliputi perancangan perangkat keras dan perancangan perangkat lunak.
A. Perancangan Perangkat Keras
Secara umum perancangan robot omnidirectional menuju target berbasis prinsip dead reckoning empat tetikus optik.
4
Motor DC 0 Motor DC 1 Catu Daya Motor DC 2 Motor DC 3 Driver Motor 1 Driver Motor 2Gambar 6 Perancangan Perangkat Keras
Tiap-tiap bagian dari diagram blok sistem di atas dapat dijelaskan sebagai berikut:
1. Catu daya berfungsi sebagai suplai sistem keseluruhan. 2. Mikrokontroler AVR ATMega8535 berfungsi untuk melaksanakan tugas-tugas yang meliputi akses motor DC, pembuatan prosedur, fungsi serta fungsi-fungsi tertentu, dan komunikasi serial dengan laptop yang diprogram dengan menggunakan bahasa C.
3. Laptop berfungsi untuk visualisasi trayektori, posisi dan orientasi robot, pengambilan data, dan perhitungan nilai error. 4. Joystick digunakan untuk mengendalikan gerakan robot secara manual.
5. Tetikus Optik berfungsi sebagai sensor posisi dan orientasi robot
B. Perancangan Perangkat Lunak
Pada perancangan perangkat lunak tugas akhir berjudul perancangan robot omnidirectional menuju target berbasis prinsip dead reckoning empat tetikus ini menggunakan pendekatan diagram fungsional dan diagram tingkah laku (statechart).
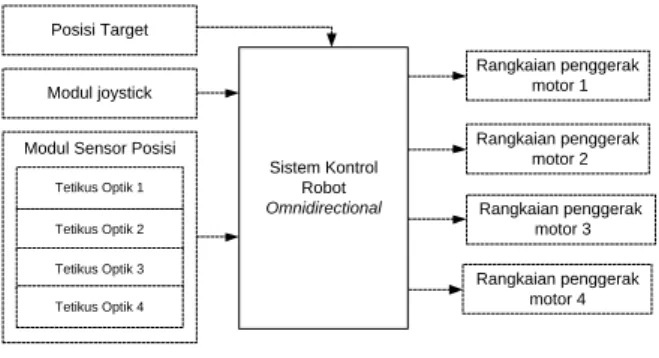
Langkah pertama dalam perancangan menggunakan pendekatan diagram fungsional adalah menggambar diagram fungsional level 0 yaitu diagram yang menunjukkan aliran data dari input ke sistem kemudian ke output. Diagram fungsional level 0 pada perancangan robot omnidirectional ini adalah pada gambar 7 sebagai berikut.
Sistem Kontrol Robot Omnidirectional Rangkaian penggerak motor 4 Rangkaian penggerak motor 3 Rangkaian penggerak motor 2 Modul joystick
Modul Sensor Posisi
Tetikus Optik 2 Tetikus Optik 3 Tetikus Optik 4 Tetikus Optik 1 Rangkaian penggerak motor 1 Posisi Target
Gambar 7 Gambar diagram fungsional level 0
Setelah menggambar diagram fungsional level 0, langkah selanjutnya adalah mendetailkan diagram fungsional dengan menambahkan fungsi-fungsi dan tingkah laku dari robot
omnidirectional. Adapun diagram fungsional level 1 pada
gambar 8 adalah sebagai berikut.
Modul Posisi Posisi Target Set point Orientasi Robot Baca Data 4 Tetikus Kontrol posisi robot Baca Data Joystick Motor 3 Motor 2 Baca posisi Target Wt eW Xp,Yp Joystick Kontrol Motor Hitung Error Posisi Robot
Hitung Posisi dan orientasi Robot Xr,Yr,Wr eX,eY Hitung Error Orientasi Robot Kontrol Orientasi robot Xj,Yj Pemilihan Mode Motor 4 Motor 1 X,Y,W
Gambar 8 Gambar diagram fungsional level 1
Gambar 8 menunjukkan gambar diagram fungsional level 1, simbol blok kotak dengan garis putus-putus menunjukkan simbol input dan output, simbol blok kotak dengan garis tegas adalah simbol tugas (task) yang harus dikerjakan oleh program, garis putus-putus menunjukkan aliran sinyal kontrol, garis tegas menunjukkan aliran data, dan garis sejajar menunjukkan penyimpan data (buffer).
Pada perancangan robot omnidirectional ini yang digunakan sebagai input adalah modul sensor posisi, modul joystick, posisi target, dan set point orientasi robot. Sedangkan sebagai
output adalah motor 1, motor 2, motor 3, dan motor 4.
Tugas-tugas (task) yang harus dikerjakan oleh program antara lain adalah baca posisi target, hitung error posisi robot, baca data tetikus optik, hitung posisi dan orientasi robot, hitung error oreintasi robot, baca data joystick, pemilihan mode, kontrol posisi robot, kontrol orientasi robot, dan kontrol motor. Penjelasan dari masing-masing task adalah sebagai berikut. 1. Baca posisi target merupakan tugas untuk membaca set
point target yang diharapkan menjadi tujuan robot dengan membaca posisi titik X,Y yang dipilih dengan menggunakan tetikus user.
2. Hitung error posisi robot merupakan tugas untuk menentukan jarak terdekat antara robot dengan titik acuan yang dipilih.
3. Baca data tetikus optik merupakan tugas untuk membaca data keempat tetikus optik secara bersamaan.
4. Hitung posisi dan orientasi robot merupakan tugas untuk menghitung posisi dan orientasi robot aktual dengan prinsip dead reckoning empat tetikus optik.
5. Hitung error orientasi robot merupakan tugas untuk menghitung nilai error orientasi robot.
6. Baca data joystick merupakan tugas untuk membaca data posisi joystick yang digunaka untuk menggerakan robot secara manual.
7. Pemilihan mode merupakan tugas yang digunakan untuk melakukan pemilihan mode robot yang digunakan yaitu otomatis atau manual.
8. Kontrol posisi robot merupakan tugas yang digunakan untuk pengontrolan posisi robot.
9. Kontrol orientasi robot merupakan tugas yang digunakan untuk melakukan kontrol orientasi robot.
10. Kontrol motormerupakan tugas yang digunakan untuk sebagai kontrol data input PWM masing-masing motor
.
5
IV. PENGUJIAN DAN ANALISA
A. Pengujian Pembacaan Tetikus Optik Sebagai Sensor
Posisi
Pengujian pembacaan tetikus optik dilakukan dengan menggerakan robot serah sumbu X dan searah sumbu Y dan membandingkan jarak yang ditempuh robot dalam komputer dan jarak yang ditempuh robot sesungguhnya. 1) Sumbu X
Tabel 2 Pengujian jarak sumbu X untuk arah positif
Skala 1: 3 P e rc Jara k S e be n a rny a (c m ) Ja ra k ko m put e r Ja ra k P e ngukur a n (c m ) K e sa la ha n (c m ) K e sa la ha n sum bu Y (c m ) K e sa la ha n S udu t ( 0 ) 1 20 60 20 0 0 0,61 2 20 62 20,67 0,67 0 0,61 3 20 62 20,67 0,67 0 0,30 4 20 60 20 0 0 0,30 5 20 60 20 0 0 0,61 6 60 183 61 1 0,67 0,30 7 60 184 61,33 1,33 1 1,83 8 60 180 60 0 0 0,91 9 60 182 60,67 0,67 0 0,30 10 60 183 61 1 0 0,61 11 100 300 100 0 0,67 1,22 12 100 303 101 1 2 2,74 13 100 301 100,33 0,33 2 2,74 14 100 300 100 0 0 0,91 15 100 300 100 0 1 1,83 Rata – rata Kesalahan 0.44
467
0.489 33
1.05 467
Tabel 3 Pengujian jarak sumbu X untuk arah negatif
Skala 1: 3 P e rc Jara k S e be n a rny a (c m ) Ja ra k ko m put e r Ja ra k P e ngukur a n (c m ) K e sa la ha n (c m ) K e sa la ha n sum bu Y (c m ) K e sa la ha n S udu t ( 0 ) 1 20 59 19,67 0,33 0 0,61 2 20 58 19,33 0,67 0 0,30 3 20 58 19,33 0,67 0 0,91 4 20 59 19,67 0,33 0 4,29 5 20 57 19 1 0 0,61 6 60 177 59 1 0,67 1,22 7 60 180 60 0 0,33 0,30 8 60 178 59,33 0,67 0 0,30 9 60 178 59,33 0,67 0,67 1,52 10 60 177 59 1 0,33 0,61 11 100 298 99,33 0,67 1,67 2,74 12 100 299 99 1 2 2,74 13 100 296 98,67 1,33 2 2,74 14 100 295 98,33 1,67 1,33 2,13 15 100 290 96,67 3,33 1,33 2,13 Rata – rata Kesalahan 0.95
6
0.688 67
1.54 333
Dari Tabel 2 dan Tabel 3 dapat dilihat bahwa rata-rata kesalahan data pada sumbu X untuk arah positif adalah sekitar 0,44467 dan untuk arah negatif adalah sekitar 0,956. Dari data dapat dilihat bahwa masih ada perbedaan antara jarak yang terukur dengan jarak yang sebenarnya serta masih ada pergeseran posisi di sumbu Y dan data orientasi robot. Hal ini dapat disebabkan kesalahan integral yang disebabkan prinsip
dead reckoning dengan kata lain semakin jauh jarak yang
ditempuh semakin memiliki kesalahan dalam menentukan poissi walapun kesalahan yang dihasilkan tidak terlalu besar. Kesalahan lain disebabkan pemasangan tetikus optik yang kurang presisi sehingga terjadi pergesaran data.
2) Sumbu Y
Tabel 4 Pengujian jarak sumbu Y untuk arah positif *
Skala 1: 3 P e rc Jara k S e be n a rny a (c m ) Ja ra k ko m put e r Ja ra k P e ngukur a n (c m ) K e sa la ha n (c m ) K e sa la ha n sum bu X (c m ) K e sa la ha n S udu t ( 0 ) 1 20 60 20 0 0,33 0,30 2 20 59 19,67 0,33 0 0,91 3 20 61 20,33 0,33 0,33 0,91 4 20 60 20 0 0,33 0,91 5 20 60 20 0 0,33 0,61 6 60 178 59,33 0,67 0 1,52 7 60 181 60,33 0,33 0,33 0,91 8 60 182 60,67 0,67 0,33 0,30 9 60 181 60,33 0,33 0,33 0,91 10 60 179 59,67 0,33 0,33 0,30 11 100 293 97,67 2,33 2,67 0.30 12 100 297 99 1 1,67 2,74 13 100 300 100 0 0,67 1,52 14 100 304 101,33 1,33 0,33 0,91 15 100 300 100 0 0,33 0,91 Rata – rata Kesalahan
0.51 0.554 0.93 067
Tabel 5 Pengujian jarak sumbu Y untuk arah negatif
Skala 1: 3 P e rc Jara k S e be n a rny a (c m ) Ja ra k ko m put e r Ja ra k P e ngukur a n (c m ) K e sa la ha n (c m ) K e sa la ha n sum bu X (c m ) K e sa la ha n S udu t ( 0 ) 1 20 60 20 0 0,33 0,61 2 20 58 19,33 0,67 0,33 0,61 3 20 59 19,67 0,33 0,33 0,61 4 20 60 20 0 0,33 1,22 5 20 60 20 0 0 0,30 6 60 181 60,33 0,33 0,33 0,30 7 60 181 60,33 0,33 0,33 0,91 8 60 183 61 1 0,33 0,30 9 60 180 60 0 0,33 0,30 10 60 180 60 0 0,33 0,91
6
11 100 303 101 1 1 2,13 12 100 298 99,33 0,67 2,67 0,91 13 100 301 100,33 0,33 1 1,22 14 100 301 100,33 0,33 1 0,61 15 100 299 99,67 0,33 1 0,61 Rata – rata Kesalahan 0.35467
0.642 67 0.77
Dari Tabel 4 dan Tabel 5 dapat dilihat bahwa rata-rata kesalahan data pada sumbu Y untuk arah positif adalah sekitar 0,51 dan untuk arah negatif adalah sekitar 0,35467. Dari data dapat dilihat bahwa masih ada perbedaan antara jarak yang terukur dengan jarak yang sebenarnya serta masih ada pergeseran data posisi di sumbu X dan data orientasi robot. Hal ini dapat disebabkan kesalahan integral yang disebabkan prinsip dead reckoning dengan kata lain semakin jauh jarak yang ditempuh semakin memiliki kesalahan dalam menentukan poisi walapun kesalahan yang dihasilkan tidak terlalu besar. Kesalahan lain disebabkan pemasangan tetikus optik yang kurang presisi sehingga terjadi pergesaran data. Dari dua percobaan pada sumbu X dan sumbu Y dapat dilihat bahwa robot sudah dapat mengukur jarak dan arah dengan baik dengan kepresisian tinggi. Walaupun masih ada kesalahan yang terjadi dalam penentuan jarak dengan jarak yang sebenarnya.
B. Pengujian Perhitungan Orientasi Robot
Pengujian perhitungan orientasi robot bertujuan untuk mengetahui keakuratan sudut orientasi robot hasil perhitungan menggunakan prinsip dead reckoning. Pengujian ini dilakukan dengan menggerakkan robot memutar dengan besar sudut yang sudah ditentukan yaitu 90 derajat. Hasil pengukuran kemudian dibandingkan dengan hasil perhitungan orientasi ditampilkan secara visual pada program. Tabel 6 memperlihatkan hasil pengujian ini.
Tabel 6 Hasil pengujian orientasi robot
P e rc ob a an S udut S e be n a rny a ( 0 ) S udut P e ngukur a n ( 0 ) K e sa la ha n ( 0 ) K e sa la ha n sum bu X (c m ) K e sa la ha n S um bu Y (c m ) 1 90 89,91 0,09 0,33 0,67 2 90 88,99 1,01 0,33 1,33 3 90 88,99 1,01 0,33 0,67 4 90 89,29 0,71 0 0,67 5 90 93,73 3,73 1,33 1 6 90 92,79 2,79 0 0,33 7 90 92,17 2,17 0 0,33 8 90 94,9 4,9 0 0 9 90 89,82 0,18 0 0 10 90 90,41 0,41 0 0 Rata-rata kesalahan 1.7 0.232 0.5
Dari Tabel 6 dapat dilihat bahwa terdapat kesalahan antara orientasi hasil perhitungan menggunakan prinsip dead
reckoning dengan orientasi sebenarnya. Penyebab kesalahan
tersebut adalah dikarenakan kurang tepatnya dalam memutar robot secara 90 derajat, itu bisa terlihat dari munculnya kesalahan data pada posisi X dan posisi Y, disamping itu
selalu ada kesalahan integral yang terjadi dalam prinsip dead reckoning.
C. Pengujian Kendali Orientasi Robot
Pengujian Kendali Orientasi robot bertujuan untuk mengetahui keakuratan robot mempertahankan orientasi awal atau sebesar nol derajat sehingga acuan arah robot tidak akan pernah berubah meskipun robot bergerak dalam arah X maupun arah Y. Pengujian ini dilakukan dengan cara memberi gangguan robot atau diputar ke arah kiri dan kanan.
Gambar 9 Tampilan grafik gangguan ke arah kanan
Gambar 10 Tampilan grafik gangguan ke arah kiri
Gambar 11 Tampilan grafik gangguan ke kiri dan ke kanan berulang-ulang
Dari grafik gambar 9, 10 , dan11 terlihat bahwa robot akan kembali ke titik acuan nol derajat bila mendapat ganggun ke arah kanan maupun ke arah kiri.
7
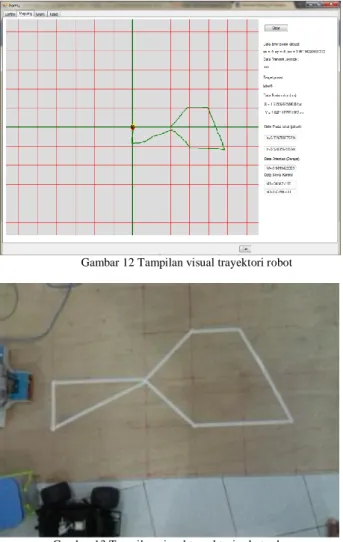
D. Pengujian Trayektori RobotPengujian trayektori robot bertujuan untuk mengetahui keakuratan trakyektori yang dihasilkan dalam program di komputer dengan trayektori sesungguhnya yang dilewati oleh robot melalui kendali joystick. Hal ini dapat diperlihatkan dalam gambar 12 dan 13 dibawah ini.
Gambar 12 Tampilan visual trayektori robot
Gambar 13 Tampilan visual trayektori robot sebenarnya
Dari gambar 12 yang dihasilkan komputer tampak sama dengan trayektori yang dilewati robot sesungguhnya pada gambar 13. Hal ini membuktikan bahwa prinsip dead
reckoning yang digunakan sudah benar dan mempunyai
kepresisian tinggi
E. Pengujian Kendali Robot Otomatis Menuju Target
Pengujian ini dilakukan dengan cara memerintah robot dari posisi awal (kordinat 0,0 ) ke posisi tujuan 1 (kordinat 61,2), kemudian dilanjutkan ke tujuan 2 (kordinat 60,60), kemudian dilanjutkan ke tujuan 3 (kordinat 180,60), kemudian dilanjutkan ke tujuan 4 (kordinat 120,0), dan kemudian dilanjutkan ke tujuan 5 (kordinat 240,60). Skala dalam peta yaitu 1:3 yang menunjukan 1 cm jarak sesungguhnya mewakili 3 piksel jarak di komputer. Data tabel perhitungan dan pengukuran robot dapat diperlihatkan dalam tabel 4.8 dibawah ini.
Tabel 7 Hasil pengujian robot menuju target
P e rc P os is i T a rge t (X ,Y ) P os is i R obot d i K om put e r (X ,Y ) P os is i Robo t S e sungguhny a (X ,Y ) c m O ri e n ta si Robo t di K o m pu te r ( 0 ) O ri e n ta si Robo t S e sungguhny a ( 0 ) 1 61,2 56,0 19 , 0 -0.914 -5 2 61,61 59, 66 21, 19 -0.914 -5 3 181,59 184,57 62,20 -2,44 -7 4 119,1 121,-2 42,0 0,30 -5 5 240,60 243,57 83, 22 -0,30 -4 Dari tabel 7 dapat dilihat robot dalam menuju target tertentu masih memiliki error posisi dan orientasi. Untuk kesalahan perbandingan titik acuan di komputer dan data posisi di komputer terjadi karena motor robot sudah tidak mampu menggerakan badan robot dengan PWM kecil. PWM kecil terjadi karena nilai KP yang digunakan tidak mampu membuat sinyal kontrol mencapai titik acuan dari hasil perkalian error yang kecil, solusi permasalahan dengan menambahkan nilai KP namun bila nilai KP terlalu berlebihan akan membuat osilasi dan membuat mobilitas robot menjadi berkurang sehingga hal tersebut dihindarkan walaupun robot tidak tepat sampai titik acuan.
Sedangkan kesalahan yang terjadi di komputer dan kenyataan diakibatkan error yang terjadi pada prinsip dead reckoning serta adanya getaran dari robot dan karakteristik permukaan robot. Pada gambar 14 diperlihatkan trayektori robot yang dilewati beserta kelima target.
Gambar 14 Tampilan visual robot menuju target
Dari gambar 14 terlihat robot mampu mendekati titik acuan dan mempertahankan arah acuan robot sebesar nol derajat. Karena ada kendali orientasi tersebut robot memiliki mobilitas yang tinggi.
V. PENUTUP
A. Kesimpulan
Berdasarkan pengujian dan analisis yang telah dilakukan, maka dapat disimpulkan beberapa hal sebagai berikut:
1
2 3
4 5
8
1. Semakin jauh jarak tempuh robot omnidirectional, maka semakin besar error perhitungan posisi dan orientasi robot dengan menggunakan prinsip dead recokning. 2. Rata-rata kesalahan hasil pengukuran jarak pada sumbu
X untuk arah positif menggunakan prinsip dead
reckoning adalah 0.44467 cm dengan pergeseran data
pada sumbu Y dengan rata-rata 0.48933 dan pergeseran data orientasi sebesar 1.05 467 derajat.
3. Rata-rata kesalahan hasil pengukuran jarak pada sumbu X untuk arah negatif menggunakan prinsip dead
reckoning adalah 0.956 cm dengan pergeseran data pada
sumbu Y dengan rata-rata 0.68867dan pergeseran data orientasi sebesar 1.54333 derajat
4. Rata-rata kesalahan hasil pengukuran jarak pada sumbu Y untuk arah positif menggunakan prinsip dead
reckoning adalah 0.51 cm dengan pergeseran data pada
sumbu X dengan rata-rata 0.554 dan pergeseran data orientasi sebesar 0.93067 derajat
5. Rata-rata kesalahan hasil pengukuran jarak pada sumbu Y untuk arah negatif menggunakan prinsip dead
reckoning adalah 0.35467 cm dengan pergeseran data
pada sumbu X dengan rata-rata 0.64267 dan pergeseran data orientasi sebesar 0, 77 derajat
6. Rata-rata kesalahan orientasi robot saat dipuatar 90 derajat yaitu sebesar 1.7 derajat dengan pergeseran data di sumbu X dengan rata-rata 0,232 cm dan pergeseran di sumbu Y sebesar 0,5 cm
7. Robot akan kembali ke acuan orientasi awal yaitu nol derajat bila mendapat gangguan dari luar.
8. Trayektori yang dihasilkan pada perancangan robot omnidirectional berbasis prinsip dead reckoning sama dengan trayektori yang dilewati robot sesungguhnya. 9. Misi menuju target pada robot omnidirectional
menunjukan robot omnidirectional mempunyai mobilitas yang tinggi dalam navigasinya.
B. Saran
Untuk pengembangan sistem lebih lanjut, maka ada beberapa saran yang dapat dilakukan yaitu sebagai berikut:
1. Pemasangan sensor yang presisi diyakini akan membuat prinsip dead reckoning empat tetikus lebih presisi. 2. Pemilihan tetikus optik dengan kecepatan yang semakin
tinggi untuk membaca tekstur permukaan dinilai akan mengurangi kesalahan bila robot bergerak lebih cepat dari kecepatan tetikus.
3. Perlu dikembangkan sensor posisi dengan tetikus optik dengan keluaran data posisi langsung diterjemahkan oleh mikrokontroler dan bisa dikirim ke master tanpa kabel (wireless).
4. Program visualisasi pemetaan posisi dan orientasi kursi roda cerdas dapat dikembangkan agar tampilan lebih menarik seperti mengubah tampilan 2D menjadi 3D, mempercantik antarmuka program dan lain-lain
.
DAFTAR PUSTAKA
[1] Borenstein, J, et al, Where am I? Sensors and Methods
for Mobile Robot Positioning, Dept. Mechanical Eng.
Michigan, 2006.
[2] Cyberton Solution, Cara Mudah Menguasai Microsoft
C# 2008, ANDI, Yogyakarta, 2009.
[3] Fauzan,Isnan, Pemetaan Posisi dan Orientasi Kursi
Roda Cerdas Berbasis Dead Reckoning, Skripsi S-1,
Universitas Diponegoro, Semarang, 2010.
[4] Hartanto,Budi, Membuat Program-Program Keren
Dengan Visual C#.Net Secara Mudah, ANDI,
Yogyakarta, 2009
[5] Heryanto, M.Ary dan Wisnu Adi P., Pemrograman
Bahasa C untuk Mikrokontroler ATMEGA8535,
Penerbit Andi, Yogyakarta, 2008.
[6] Joni, I Made dan Budi Harharjo, Pemrograman C dan
Implementasinya, Penerbit Informatika, Bandung,
2006.
[7] Kim, Sungbok dan Sanghyup Lee, Robust Velocity
Estimation of an Omnidirectional Mobile Robot Using a Polygonal Array of Optical Mice, International
Journal of Control, Automation, and Systems, vol. 6, no. 5, pp. 713-721, October 2008
[8] Kurniawan, Erick, Matakuliah Komputer Grafis, http://actualtraining.wordpress.com, 2011.
[9] Miyazaki, Fumio, Precise dead-reckoning for mobile
robots using Multiple optical mouse sensors, Graduate
School of Engineering Science of Osaka University, Informatics in Control, Automation and Robotics II, 145–151, Springer,2007
[10] Oliveira, Helder P Oliveira, et al, Modeling And
Assessing of Omni-directional Robots with Three and Four Wheels, Universidade do porto, Faculdade
deEngenharia INESC-Porto, Portugal,2009.
[11] Pitowarno, Endro. “Robotika, Desain, Kontrol, dan Kecerdasan Buatan”. Penerbit Andi: Yogyakarta,2006. [12] Setiawan, Iwan, Kontrol PID untuk Proses Industri,
PT. Elex Media Komputindo, Jakarta, 2008.
[13] Sihombing, Sudirman, Aplikasi Sensor Accelerometer
untuk Menulis di Udara, Skripsi S-1, Universitas
Diponegoro, Semarang, 2011
[14] Thiang, Handry Khoswanto, Yosafat Wahyudi, Robot
Mobil Omnidirection Beroda Empat Dengan Menggunakan Sistem Synchro Drive, Universitas
Kristen Petra, 2010.
[15] Wardhana L. “Belajar Sendiri Mikrokontroler AVR Seri ATmega8535 Simulasi, Hardware dan Aplikasi”. Penerbit Andi: Yogyakarta, 2006.
[16] Xiao, John, Robot Sensing and Sensors, City College of New York, http://www-ee.ccny.cuny.edu/www/web/jxiao/sensor.pdf
[17] ---, Cara Kerja Mouse Optik
http://www.curvatech.com/2009/06/24/cara-kerja-mouse-optik
[18] ---, Dead reckoning, http://en.wikipedia.org, Januari 2010.
[19] ---, Joystick Control Library, http:// source www.trossenrobotics.com, Januari 2011.
[20] ---, Robot Omnidirection with Fuzzy,
http://www.societyofrobots.com/robot_omni_wheel.sh tml, 2011
[21] ---, Simple Serial Communication with Microsoft
Visual C# Express, http://csharp.simpleserial.com,
Oktober 2009.
[22] ---, http:/alldatasheet.com
[23] ---, http://jstookey.com/arcade/rawmouse/ [24] ---, http://wikipedia.org/wiki/
![Gambar 4 Konfigurasi robot dan tetikus [9]](https://thumb-ap.123doks.com/thumbv2/123dok/4666048.3422017/3.892.62.801.99.1123/gambar-konfigurasi-robot-dan-tetikus.webp)