LAPORAN AKHIR
RANCANGAN SISTEM VISION UNTUK KEPERLUAN
GRADING DALAM MENGANTISIPASI KEBUTUHAN
INDUSTRI PERIKANAN
Diusulkan oleh:
Dini Pratiwi
1401130181
2010
Priyangkah Hartawan Sim
1401115243
2010
Steven Imanuel
1401139035
2010
Tommy
1601236164
2012
UNIVERSITAS BINA NUSANTARA JAKARTA
I – PENDAHULUAN
Latar Belakang Masalah
Sebagian besar wilayah Indonesia adalah laut dan sungai yang memiliki potensi besar dalam mendukung peningkatan pendapatan perkapita rakyat, menyerap tenaga kerja, dan memberdayakan kemakmuran rakyat melalui produk kelautan (Kompas-Ekonomi, 2012). Hal ini menyebabkan Indonesia memiliki potensi yang besar dalam sektor perikanan. Alan Koropitan (Kompas, 2012) kemajuan sains dan teknologi menjadi modal kuat dalam pengelolaan perikanan. Dengan melihat kondisi perairan sebagai sumber yang dapat memberikan lapangan kerja yang besar, tim penulis akan merancang sebuah teknologi sistem vision untuk mengantisipasi kebutuhan perikanan dalam mensortir ikan-ikan yang akan ditangkap.
Vision merupakan teknologi pengolahan citra untuk menghasikan informasi
yang disampaikan dari citra dengan menggunakan komputer. Dalam aplikasi perikanan, vision dapat dipakai untuk proses grading otomatis, yaitu proses sortir ikan yang diinginkan sesuai dengan ukuran dan bentuk ikan. Dengan adanya sistem vision pada proses grading diharapkan kondisi tertangkapnya ikan kecil yang belum cukup dewasa untuk ditangkap dapat diminimalkan. Proses grading membutuhkan kemampuan dalam segmentasi dan deskripsi pada sistem vision yang akan dikembangkan.
Kebutuhan perikanan ini dapat memanfaatkan pengembangan iptek yang banyak digunakan dalam aplikasi robot vision dikarenakan ada beberapa persamaan antara vision yang diaplikasikan pada robot dan vision yang diaplikasikan pada perikanan. Vision atau kemampuan visual pada robot memiliki peranan penting pada sistem robot karena dapat memberikan informasi kondisi lingkungan ketika robot sedang berinteraksi dengan lingkunganya. Serupa dengan hal ini, kemampuan sistem vision dapat pula digunakan untuk memberikan informasi keberadaan ikan dan kondisi lingkungan sekitarnya.
Perumusan Masalah
Bagaimana menciptakan sistem vision yang dapat memisahkan citra ikan dari benda selain ikan serta mendeskripsikan ukuran ikan yang kedepannya dapat digunakan untuk proses grading ?
Tujuan Program
Tujuan untuk membuat sistem vision yang memiliki kemampuan mendeskripsikan ukuran ikan dan segmentasi ikan yaitu memisahkan citra ikan dari benda selain ikan, misal batuan dan tumbuhan air dari citra yang ditangkap oleh kamera. Selain itu dapat mengelompokkan ikan menjadi dua kelompok sesuai dengan ukurannya.
Luaran yang diharapkan
Penelitian ini diharapkan menghasilkan luaran:
Sebuah alat grading berbasiskan sistem vision yang diharapkan dapat digunakan dalam budidaya ikan yaitu mengetahui kelayakan ikan yang ditangkap berdasarkan kelompok ukuran panjang ikan.
Sebuah alat pemisah ikan atau lintasan grading.
Kegunaan Program
Kegunaan sistem vision yang telah dibuat yaitu untuk keperluan grading ikan dengan mengelompokkan ikan berdasarkan ukuran yang bereda dari hasil proses deskripsi ukuran ikan melalui citra yang ditangkap kamera. Serta kedepannya memiliki kemampuan sortir ikan dengan memisahkan citra ikan dari benda selain ikan, misal batuan dan pasir dari hasil proses segmentasi.
II - TINJAUAN PUSTAKA
Image Processing
Image processing atau pengolahan citra merupakan salah satu tahap pada vision dalam mengolah gambar digital yang diimplementasikan pada perangkat lunak. Image processing memiliki beberapa proses diantaranya adalah image enhancement,
segmentasi dan deskripsi (Petrou, 2010). Image enhancement merupakan tahap pemrosesan citra pada vision untuk meningkatkan kualitas citra agar menjadi lebih baik (Maini dan Aggarwal, 2010). Segmentasi merupakan salah satu tahap pada
image processing dengan memisahkan suatu bagian atau region pada citra dari bagian
lain. Diperlukannya proses segmentasi sebelum menuju tahap deskripsi agar objek yang ingin dideskripsikan dapat dipisahkan terlebih dahulu dari objek lain yang
menjadi background atau latar belakang. Segmentasi terbagi menjadi dua macam, yaitu segmentasi region dan edge (Jain, Katsuri, Schunck, 1995: 73). Segmentasi
region merupakan proses pengelompokkan bagian-bagian pada citra sehingga semua
pixel yang memilliki karakteristik yang sama dikelompokkan menjadi satu bagian.
Region growing merupakan salah satu metode segmentasi region, yang menggunakan
kriteria homogeneity dengan mencari pixel-pixel yang memiliki karakter mirip dengan intensitas seed yang sudah ditentukan, kemudian menggabungkannya menjadi satu region (Revol dan Jourlin, 1997).
Deskripsi tahap pada image processing dengan menyatakan karakteristik objek yang terbagi menjadi dua macam, yaitu karakteristik eksternal dan karakteristik internal. Karakteristik eksternal difokuskan pada cirri objek berupa panjang, lebar, dan orientasi garis lurus, sedangkan karakteristik internal difokuskan pada tekstur dan warna objek (Gonzales dan Woods, 2001: 644).
Dengan menggunakan dua komponen dasar sistem vision yaitu image
acquisition dan analisa citra, proses sorting dan grading otomatis dapat dilakukan
untuk memenuhi kebutuhan dalam bidang agricultural (Narendra, Hareesh, 2010). Pencahayaan dan perangkat pengambilan citra menjadi komponen yang memengaruhi
image acquisition pada sistem tersebut. Image preprocessing yang terdiri dari
thresholding dan segmentasi merupakan metode yang dipakai pada analisa citra untuk memberikan informasi dalam melakukan sorting dan grading agricultural tersebut.
Penelitian terkait dengan pengenalan ikan telah diperkenalkan oleh Alsmadi, Omar, Noah, dan Almarsdeh dengan sistem untuk mengatasi masalah klasifikasi ikan dari bentuk yang terkait dengan citra. Segmentasi menjadi metode untuk menuju ke tahap pengenalan ikan yang bergantung pada warna dan tekstur yang diaplikasikan pada dua puluh macam ikan yang berbeda (Alsmadi, Omar, Noah, Almarashdeh, 2005).
Grading
Proses grading merupakan metode untuk melakukan sorting. Dalam hal ini proses grading yang dilakukan yaitu sorting ikan yang memiliki ukuran yang berbeda. Ikan memiliki cirri yang berbeda dalam ukuran panjang dan bentuknya. Dengan diketahui ukuran panjang ikan, maka dapat diketahui pula berat ikan, sehingga dapat ditentukan ikan mana yang sudah layak diambil untuk dikomsumsi dan ikan yang belum layak untuk dikonsumsi.
III - METODE PENDEKATAN
Metode yang dilakukan dalam menyelesaikan penelitian ini diawali dengan studi literatur untuk menambah wawasan mengenai vision dan pengolahan citra, dilanjutkan dengan merancang model pengambilan citra serta menentukan metode yang digunakan padaa sistem vision. Beberapa masalah timbul ketika melakukan penelitian, sehingga dengan bantuan diskusi dengan dosen pendamping dapat membantu menyelesaikan permasalahan yang dihadapi dalam mengerjakan penelitian ini. Sistem vision yang telah dibuat kemudian diuji dengan parameter yang dapat memberikan pengaruh keberhasilan sistem.
Parameter yang mempengaruhi keberhasilan sistem vision yaitu kondisi citra ikan saat di dalam air, dan kondisi latar belakang misal batu-batuan, dedaunan, dan pasir di dalam air. Variabel yang diukur pada penelitian ini yaitu jumlah pixel yang terdapat pada citra, distribusi penyebaran intensitas pixel, dan nilai intensitas pixel pada citra. Citra ikan saat berenang di dalam air dapat berubah-ubah posisinya sehingga hal ini menjadi parameter yang mempengaruhi keberhasilan sistem vision. Dalam menguji parameter kondisi latar belakang objek, maka percobaan penelitian dilakukan dengan variasi lingkungan sekitar objek misal batu-batuan, pasir, dan daun di dalam air. Parameter intensitas cahaya menjadi pengaruh keberhasilan sistem karena apabila pengambilan citra dilakukan di ruang terbuka dengan pencahayaan dari matahari, maka nilai intensitas cahaya tinggi sekali yang dipantulkan oleh citra, sehingga mempengaruhi warna yang terkandung pada citra. Oleh karena itu percobaan ini dilakukan pada ruang tertutup tanpa pengaruh cahaya matahari.
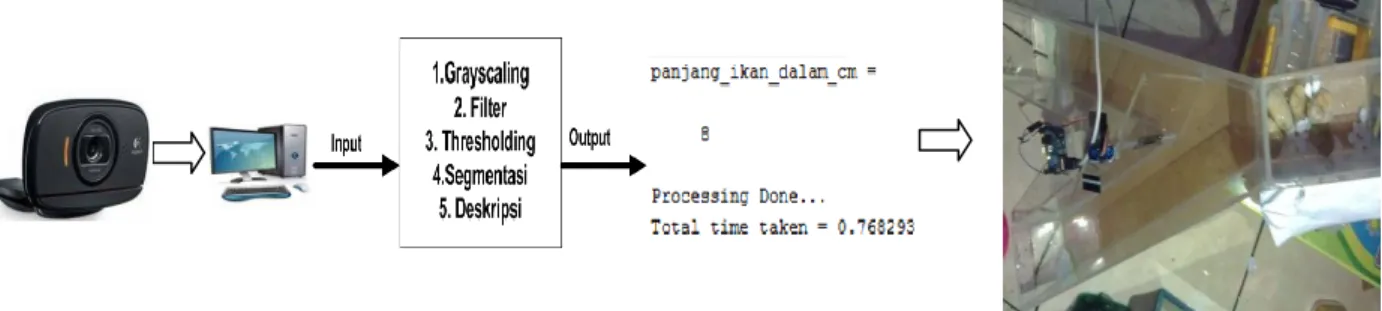
Perancangan sistem secara umum seperti pada gambar 3.1 yaitu kamera web untuk menangkap citra disambungkan ke komputer untuk melakukan pemrosesan citra hasil tangkapan kamera. Komputer disambungkan ke microcontroller arduino untuk mengontrol servo saat menggerakkan katup pada lintasan grading atau pemisah ikan agar dapat bergeser sesuai dengan hasil deskripsi ukuran ikan yang dihasilkan oleh komputer.
Gambar 3.1 Rancangan sistem secara umum
Citra yang ditangkap oleh kamera akan masuk ke komputer seperti pada gambar 3.2 untuk dilakukan pemrosesan citra oleh program Matlab. Pemrosesan citra yang dirancang terbagi menjadi lima tahapan seperti pada gambar 3.1 diawali dengan
grayscaling yaitu mengubah gambar RGB (Red Green Blue) menjadi warna abu-abu.
Dilanjutkan ke tahap filter untuk menghilangkan noise yang dapat mengganggu karakteristik citra.
Kemudian citra akan diproses lanjut pada tahap thresholding dilanjutkan segmentasi untuk membedakan antara ikan dari latar belakang objek selain ikan berupa batu-batuan dan daun-daun yang terdapat pada citra tersebut. Dengan proses segmentasi, maka citra ikan yang terpisah dari objek selain ikan dapat dianalisa lebih lanjut pada tahap deskripsi. Analisa objek dilakukan pada tahap deskripsi agar didapatkan informasi mengenai ukuran objek.
Gambar 3.2 Ikan yang diproses citranya oleh computer
IV – PELAKSANAAN PROGRAM
Waktu pelaksanaan : Maret – Juli 2014
Instrument pelaksanaan yaitu kamera web, komputer, arduino, servo, ikan-ikan, tumbuhan air, batuan air dan komponen pernik akuarium, akrilik sebagai bahan lintasan grading.
V – HASIL YANG DICAPAI
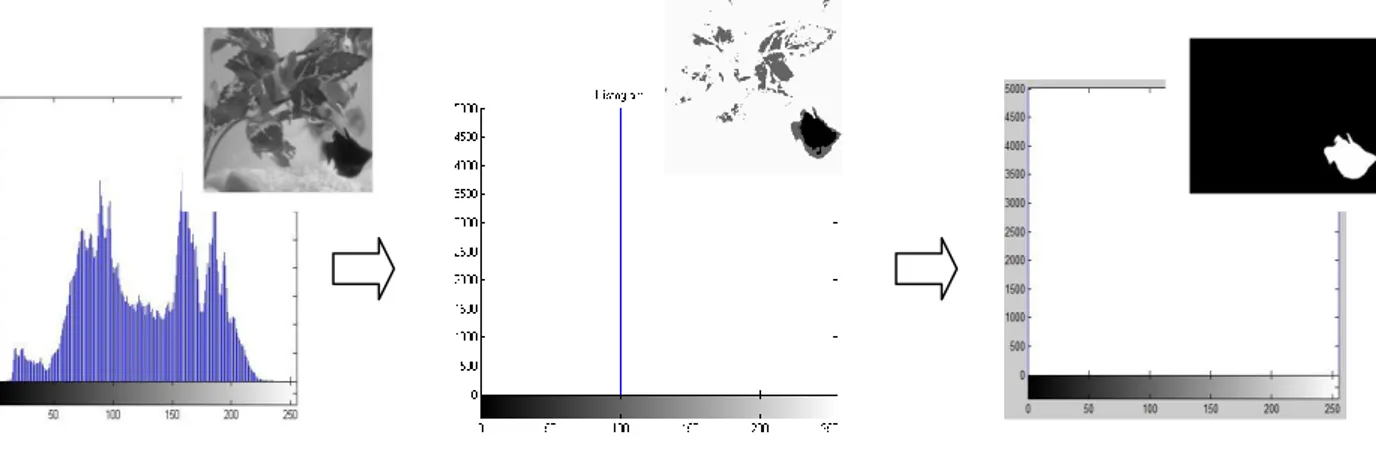
Penelitian ini menghasilkan suatu alat berbasis kamera dan komputer sebagai sistem vision untuk pengolahan citra yang hasil dari program vision akan dikontrol dengan microncontroller untuk mengatur pergerakan katup pada lintasan tempat ikan sebagai proses grading. Melalui tahap awal metode pengolahan citra oleh komputer didapatkan hasil gambar grayscaling dan juga histogram yang menggambarkan distrubusi penyebaran intensitas pixel citra yang bervariasi yang merepresentasikan objek ikan dan latar belakang objek ditampilkan pada gambar 5.1(a). Agar distribusi intensitas pixel citra lebih sederhana maka dilakukan thresholding yang hasilnya ditampilkan pada gambar 5.1(b) dengan tigas jenis nilai intensitas pixel pada citra. Dengan histogram yang lebih sederhana dari sebelumnya, maka segmentasi menjadi lebih mudah dilakukan sehingga citra ikan dapat terpisah dari latar belakang dedaunan, dan batuan pada gambar 5.1(c). Setelah ikan berhasil dipisahkan dari objek latar bekang lingkungan sekitar, maka proses selanjutnya yaitu deskripsi dapat dilakukan untuk menghitung panjang dan lebar ikan dalam satuan pixel. Hasil deskripsi ikan pada gambar 5.2(a) memberikan informasi berupa kelompok ukuran panjang ikan, dan informasi waktu yang diperlukan yaitu 0.7 detik untuk mengerjakan seluruh metode pengolahan citra pada komputer.
(a) (b) (c)
Gambar 5.1(a)Hasil grayscale (b)Hasil threshold (c) Hasil segmentasi ikan
Hasil deskripsi ikan dari komputer akan masuk ke microntroller arduino untuk mengatur pergerakan servo motor dalam menggerakkan katup. Jika hasil deskripsi
menunjukkan panjang ikan dengan kelompok 5-8 cm, microcontroller akan memberi perintah ke servo untuk bergerak agar katup menutup ke lintasan sebelah kanan, sehingga ikan berenang ke arah lintasan grading sebelah kiri seperti pada gambar 5.2(b). Sedangkan jika hasil deskripsi menunjukkan panjang ikan 1 sampai 4 cm, maka servo menggerakkan katup kearah kiri untuk menutup lintasan kiri, sehingga ikan berenang kearah lintasan grading sebelah kanan.
Microcontroller Servo
Katup Ikan
(a) (b)
Gambar 5.2(a) Hasil deskripsi ikan (b) Lintasan grading ikan
VI – KESIMPULAN DAN SARAN
Sistem vision yang telah dihasilkan merupakan perangkat lunak yang dapat melakukan pengolahan citra yang didapat dari citra hasil tangkapan kamera web, yaitu ikan beserta latar belakangnya yaitu objek selain ikan misal batuan dan tumbuhan air. Perangkat lunak untuk pengolahan citra dirancang menggunakan lima metode, yaitu grayscaling, filter, thresholding, segmentasi, dan deskripsi. Hasil olahan citra yang dilakukan oleh komputer akan tersambung dengan microcontroller arduino yang bertujuan untuk mengatur pergerakan servo dalam mengarahakan pergerakan katup pada lintasan grading. Lintasan terbagi menjadi dua macam, dimana katup akan menutup salah satu lintasan tersebut akan ikan berenang sesuai dengan hasil deskripsi ukuran yang dihasilkan oleh program pengolahan citra.
Beberapa hal memerlukan peningkatan adalah keterbatasan kemampuan sistem untuk menangkap gambar dari ikan yang bergerak dengan cepat dan kondisi penangkapan gambar dan peletakkan kamera yang saat ini masih menggunakan akuarium. Pengembangan lebih lanjut dapat dihasilkan software post processing untuk memberikan informasi warna ikan, keberadaan ikan di suatu perairan, serta menghitung jumlah ikan berdasarkan kelompok ukurannya. Hasil pengembangan
lebih lanjut kedepannya dapat digunakan untuk proses penangkapan ikan dengan mengetahui keberadaan populasi ikan di suatu perairan.
VII- DAFTAR PUSTAKA
[1] Alsmadi, M.K., Omar, K., Noah., S.A., Almarashdeh., B. (2005). Fish Recognition Based on Robust Features Extraction From Color Texture Measurements using Backpropagation Classifier. Journal of Theoretical and Applied Information
Technology.
[2]Bouman, C. A. (2009). Image Processing. The Connexions Project.
[3] Gonzales, R.C, dan Woods, R.E. (2001). Digital Image Processing. New Jersey: Prentice Hall.
[4] Gumus, B., Balaban, M.O., Unlusayin. (2011). Machine Vision Application to Aquatic Food. Turkish Journal of Fisheries and Aquatic Science, 171-181.
[5] Jain, R., Kasturi, R., Schunck, dan B.G. (1995). Machine Vision. Singapura: McGraw-Hill.
[6] Jason Meltzer, Stefano Soatto, Ming-Hsuan Yang, and Rakesh Gupta . (2004). Multiple View Feature Descriptors from Image Sequence via Kernel Principal Component Analysis. Computer Vision-European Conference on Computer Vision, 215-227.
[7] Kim, S., dan Casper. (2013). Application of Convolution in Image Processing with
Matlab. University of Washington.
[8] Koropitan, A. (2012, Juli 21). Babak Baru Dunia Perikanan. Kompas .
[9] Maini, R., dan Aggarwal, H. (2010). A Comprehensive Review of Image Enhancement Techniques. Journal Of Computing .
[10] Misimi, E., Mathiassen, J.R., Erikson., U. (2007). Computer Vision Based Sorting of Atlantic Salmon Fillets According to Their Color Level. Journal of Food
Science. 30-35.
[11] Narendra, Hareesh (2010) Prospects of Computer Vision Automated Grading and Sorting System in Agricultural and Food Products for Quality Evaluation.
International Journal of Computer Application.
[12] Penataan Kembali Ekonomi Kelautan dan Perikanan Sebagai Sumber Energi Peningkatan Kesejahteraan. (2012, Agustus 29). Kompas .
[13] Petrou, M. dan Petrou, C. (2010). Image Processing The Fundamentals. Singapura: John Wiley and Sons Ltd.
[14] Rafael C. Gonzales, Richard E. Woods. (2001). Digital Image Processing . New Jersey: Prentice Hall.
[15] Revol, C. dan Jourlin, M. . (1997). A New Minimum Variance Region Growing Algorithm for Image Segmentation. Pattern Recognition Letters , 249-258.
[16] Tu, K.-Y. (2009). Analysis of Camera's Images Influenced by Varying Light Illumination for Design of Color Segmentation. Journal of Information Science and
Engineering .
[17] Zion, B., Shklyar, A., Karplus, I. (2000). In Vivo Fish Sorting by Computer Vision. Journal of Aquacultural Engineering, 165-179