RANCANG BANGUN OBSTACLE AVOIDANCE
PADA
DIFFERENTIAL STEERING MOBILE ROBOT
Galih Kusuma Wardana1) Helmy Widiyantara2) Pauladie Susanto3) S1 Sistem Komputer
STIMIK STIKOM Surabaya Jl. Raya Kedung Baruk 93 Surabaya, 60298
Email : 1)[email protected], 2)[email protected], 3)[email protected]
Abstract: Various ways can be done to get to a location with long lines or the lines were short. A system that can determine the best path that has a good navigation system as well as support for sensors detecting the presence of an obstacle so that a system is not crashing and to the location safely. This study focuses on the differential steering to avoid obstacles the mobile robot, which the system uses a mobile robot that can detect the presence of an obstacle around the robot and avoid it.
This study focuses on the differential steering to avoid obstacles and the mobile robot to the destination point, the system uses a mobile robot that can detect the presence of an obstacle around the robot. The mobile robot obstacle by comparing the distance between the mobile robot, and turn to avoid obstacles with a certain distance without bumping into an obstacle. The mobile robot system is the support system or sub-system which supports the navigation system. Datas from this study were taken from the articles from the internet and this study used the method of theoretical analysis of literary study of the theory in the book. Based on the datas taken from literature and support articles
The results of this study are an obstacle avoidance system on the differential steering mobile robot managed to avoid the obstacles and reach the desired location without bumping into objects or obstructions are nearby, with value average rotation error of 6.13% for the turn and The average error of 1.26% from the mobile robot destination point.
Keyword: mikrokontroller, obstacle avoidnce System, differential steering mobile robot. Seiring dengan perkembangan
teknologi yang sangat pesat. Berbagai robot telah di kembangkan khususnya dalam bidang mobile robot. Mobile robot dapat dikendalikan secara otomatis maupun manual disesuaikan dengan kebutuhan manusia yang tentunya bertujuan agar mempermudah kerja manusia sehari-hari. Dalam pengembangannya mobile robot banyak digunakan untuk melakukan monitoring. Khususnya monitoring di tempat-tempat yang lolos dari pantauan alat manual dan pantauan yang dilakukan oleh manusia. Pada perkembangannya kebanyakan mobile robot masih
menggunakan teknologi line tracer untuk mendeteksi jalur. Dengan demikian mobile robot harus berjalan sesuai jalur yang telah di sediakan, sehingga waktu yang dibutuhkan dalam mencapai sasaran relatif lambat. Untuk itu hal yang mungkin dilakukan untuk mempercepat adalah tidak berjalan pada jalur yang disediakan, tetapi hal ini membutuhkan tingkat kepresisian yang tinggi dari sistem navigasi yang akan dibangun dalam sebuah mobile robot. Dengan adanya permasalahan di atas maka mobile robot harus dilengkapi sensor sensor yang dapat mendeteksi benda dan menghindarinya. Mobile robot yang
JCONES Vol 3, No 2 (2014) 116-126 JCONESVol #, No # (2014) ##-##
Journal of Control and Network Systems
Situs Jurnal : http://jurnal.stikom.edu/index.php/jconeournal of Control and Network Systems
memiliki kemampuan untuk bernavigasi yang baik harus didukung dengan sistem pengatur kemudi yang cocok untuk melakukan manuver yang baik, diantaranya adalah penggerak diferensial atau sering disebut differential steering. Mobile robot.
Untuk menghindari halangan robot juga dibekali dengan sensor ultrasonik yang dapat mendeteksi adanya penghalang dalam perjalanan robot menuju tempat yang diinginkan. Sensor ultrasonik mendeteksi objek dengan cara mengirimkan suara ultrasonik dan kemudian “mendengarkan” pantulan suara tersebut. Sensor ultrasonik hanya akan mengirimkan suara ultrasonik ketika ada pulsa trigger dari mikrokontroler (Pulsa high selama 5uS).setelah itu data dari pulsa tersebut dikonversikan menjadi data jarak dalam satuan centimeter. Dengan adanya kekurangan pada lambatnya waktu tempuh yang dibutuhkan mobile robot saat menuju tujuan yang diinginkan dengan menggunakan teknologi line tracer, dan line tracer menggunakan sistemmengikuti pola berjalan menggunakan garis atu mengikuti garis yang telah disediakan. Robot line tracer tidak dapat bebas bergerak, jika ada halangan atau garis terputus robot akan mengalami eror dan akan berhenti. Maka dari itu penulis membuat robot yang dapat memilih jalan menuju tujuan ada halangan didepannya dan robot tersebut tidak akan menabrak halangan didepannya dan dapat menghindarinya. Robot dapat mendeteksi adanya benda didepannya dan dalam jarak tertentu robot akan berbelok, sehingga robot tersebut dapat berbelok dengan aman tanpa menabrak halangan yang ada didepannya. penulis mencoba menjawab permasalahan diatas dengan ide yang penulis buat dengan judul tugas akhir “Rancang Bangun Obtacle Avoidance Pada Differential Steering Mobile Robot”
METODE PENELITIAN
Studi kepustakaan berupa data-data literatur dari masing-masing komponen, informasi dari internet, dan konsep-konsep teoretis dari buku-buku penunjang.
Dari data-data yang diperoleh maka dilakukan perencanaan rangkaian perangkat keras. Dalam perangkat keras ini, dilakukan pengujian perangkat keras dengan program-program yang telah dibuat, pembuatan
perangkat lunak adalah tahap selanjutnya. Terakhir adalah penggabungan perangkat keras dengan kerja perangkat lunak yang telah selesai dibuat.
Blok Diagram Sistem
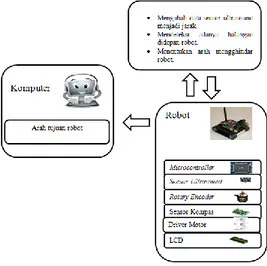
Dari penelitian ini terdapat dua proses utama yang dijalankan, yaitu proses pada pendeteksian bendan atau halangan disekitar robot dan penentuan arah menghindar robot.. Robot akan mendeteksi benda di depan robot ketika berjalan menuju arah tujuan, robot juga akan mengukur jarak antara robot dengan benda atau halangan yang berada di rute robot dalam menuju arah tujuan. Setelah halangan atau benda tersebut dekat atau jaraknya sesuai dengan jarak hindar robot yang aman sehingga robot tidak akan menabrak halangan tersebut robot akan secara otomatis akan menghindarinya. Jika benda tersebut berada di rute kearah tujuan. Pada gambar 1 adalah diagram blok keseluruhan sistem ini.
Gambar 1 Blok diagram keseluruhan dari sistem
Perancangan Perangkat Keras
Perancangan perangkat keras pada sistem ini dilakukan berdasarkan blok diagram sistem keseluruhan yang terdapat pada Gambar 1.Dalam blok diagram pada gambar 1, mikrokontroler yang bertugas sebagai pemroses akan mendapatkan data input dari sensor kompas digital dan rotary encoder. Sensor kompas akan memberikan
data berupa sudut arah mata angin dalam bentuk digital. Sedangkan rotary encoder akan memberikan data berupa pulse sebagai penghitung jarak tempuh robot. Kemudian mikrokontrol mengolah data tersebut, dalam hal ini pengolahan data pada mikrokontrol menggunakan rumus perhitungan arah dan jarak.
Hasil dari rumus tersebut adalah agar robot dapat mengetahui arah dan jarak tempuh yang harus dilalui untuk mencapai koordinat tujuan. Mikrokontroler juga menerima data dari sensor ultrasound, mikrokontroler mengolah data pantulan gelombang menjadi jarak dalam satuan cm. setelah sensor menerima data dari sensor ultrasound mikrokontroler memberikan data kepada motor driver untuk berbelok menghindari halangan atau benda. Berikut adalah gambar blok diagram perangkat keras secara keseluruhan
:
Gambar 2 Blok diagram perangkat keras keseluruhan
Perancangan
Minimum System
Rangkaian minimum sistem dibuat untuk mendukung kerja dari microcontroller ATmega dimana microcontroller tidak bisa berdiri sendiri alias harus ada rangakaian dan komponen pendukung seperti halnya
rangakaian catu daya, kristal dan lain sebagaianya yang biasanya disebut minimum sistem .
Minimum sistem ini dirancang untuk Mikrokontroller ATMega128, dalam tugas akhir ini menggunakan minimum sistem keluaran Innovative Electronics dengan tipe DT-AVR ATMEGA1280 CPU MODULE V1.0 yang di dalamnya terdapat komponen pendukung.
Penggerak Differensial Robot
Salah satu jenis mobile robot yang umum digunakan, terutama untuk dioperasikan dalam ruangan adalah dengan pengemudian atau sistem penggerak diferensial (differential drive). Alasan utamanya karena relative dan lebih fleksibel dalam melakukan manuver serta kemudahan dalam pengontrolannya. Arsitektur dari differential drive dapat dilihat pada gambar 2.6.
Gambar 3 Posisi dan orientasi mobile robot dalam sistem koordinat cartesian Kecepatan linier mobile robot pada masing-masing roda kanan dan kiri berturut-turut adalah VR dan VL. Kecepatan rotasi masing-masing roda dengan jari-jari r adalah ωR dan ωL sesuai dengan persamaan 2.1 dan 2.2 berikut:
2. ωR(t) (2.1)
3. ωL(t) (2.2)
Ketika robot melakukan gerakan memutar (berotasi) sesaat dengan panjang jari-jari R diukur dari pusat rotasi dan titik pusar kedua titik maka kecepatan rotasi disetiap titik
robot tersebut selali sama (robot adalah sistem mekanis yang rigid), sehingga persamaan 2.3 dan 2.4 berikut ini berlaku untuk menghitung kecepatan rotasi dari robot tersebut:
4. ω(t) (2.3)
5. ω(t) (2.4)
Berdasarkan persamaan 2.3 dan 2.4 kecepatan rotasi robot tersebut dapat dihitung hanya berdasarkan informasi dari kedua kecepatan linier roda robot tersebut:
6. ω(t) (2.5)
Sedangkan jari-jari dapat dicari dengan:
7. R (2.6)
Dari persamaan 2.6, jari-jari lintasan lingkaran sesaat berbanding terbalik dengan selisih kedua kecepatan roda robot. Semakin kecil selisih kedua kecepatan roda maka jari-jari lingkaran sesaat yang dibentuk oleh lintasan robot tersebut semakin panjang dan sebaliknya. Sedangkan jika kecepatan linier roda kiri maka R = ∞, atau secara praktis robot akan bergerak membentuk lintasan yang lurus. Agar robot dapat berotasi pada pusat sumbunya (R=0) maka berdasarkan persamaan 2.6, kecepatan kedua roda tersebut harus berlawanan.
Berdasarkan persamaan 2.5 dan 2.6, maka kecepatan linier robot dapat dihitung dengan menggunakan persamaan 2.7 berikut:
8. R (2.7)
Agar lebih sederhana, persamaan 2.5 dan 2.7 dapat dikumpulkan dalam bentuk persamaan matrik vektor sebagaimana berikut:
9. = (2.8)
Persamaan 2.8 pada dasarnya memperlihatkan relasi antara kecepatan linier roda-roda robot terhadap kecepatan linier dan angular robot, sedangkan persamaan 2.9 berikut akan memperlihatkan relasi sebaliknya.
10. = (2.9)
Dengan mengetahui kecepatan linier dan angular robot setiap saat, maka kecepatan pada setiap sumbu kartesian dapat dicari dengan cara memproyeksikan vektor kecepatan robot pada sumbu-sumbu tersebut. (Utomo, 2007).
Mobile robot tipe penggerak diferensial memiliki 2 buah roda penggerak yang terpisah (kanan dan kiri). Kedua roda ini digerakkan oleh motor DC yang ditempatkan pada satu sumbu secara terpisah. Sehingga kedua roda ini berfungsi sebagai penggerak sekaligus sebagai kemudi mobile robot. Sehingga tingkat keluwesan robot dan kemampuan manuver mobile robot tipe penggerak diferensial jauh lebih baik.
Jika kedua roda didorong dalam arah yang sama dan kecepatan sama pula, robot akan bergerak dalam garis lurus. Jika tidak, tergantung pada kecepatan rotasi dan arahnya, pusat rotasi bisa jatuh di mana saja di garis yang menghubungkan dua roda. Karena arah robot tergantung pada kecepatan dan arah putaran dari dua roda yang digerakkan. Jika kedua roda berputar dengan kecepatan yang sama dalam arah yang berlawanan, robot akan berputar di titik pusat sumbu. (Hartanti, 2011).
Driver Motor DC 24V
Motor DC memiliki dua kabel terhubung, kabel pertama untuk ground, kabel kedua untuk power supply dengan besar tegangan sampai 24 volt. Kecepatan putar motor dapat dikendalikan dengan mengatur besar – kecilnya tegangan yang di masukkan, antara 1 – 5 volt atau dapat juga dengan menggunakan teknik PWM (Pulse Width Modulation).
Microcontroller mengirim byte mulai dari 1 sampai dengan 255 dan akan mengubah tegangan menjadi gelmbang pulsa dan akan mengirimkan gelombang pulsa ke driver motor untuk mengatur kecepatan motor.
Sensor Ultrasonik PING parallax
Ping))) Ultrasonic Range Finder, adalah modul pengukur jarak dengan ultrasonic buatan Paralax Inc. yang didesain khusus untuk teknologi robotika. Dengan ukurannya yang cukup kecil (2,1cm x 4,5cm), sensor seharga 350 ribu rupiah ini dapat mengukur jarak antara 3 cm sampai 300 cm. Keluaran dari Ping))) berupa pulsa yang lebarnya merepresentasikan jarak. Lebar pulsanya bervariasi dari 115 uS sampai 18,5 mS.
Pada dasanya, Ping))) terdiri dari sebuah chip pembangkit sinyal 40KHz, sebuah speaker ultrasonik dan sebuah mikropon ultrasonik. Speaker ultrasonik mengubah sinyal 40 KHz menjadi suara sementara mikropon ultrasonik berfungsi untuk mendeteksi pantulan suaranya. Pada modul Ping))) terdapat 3 pin yang digunakan untuk jalur power supply (+5V), ground dan signal. Pin signal dapat langsung dihubungkan dengan mikrokontroler tanpa tambahan komponen apapun.
Perancangan Perangkat Lunak pada
Mikrokontrol
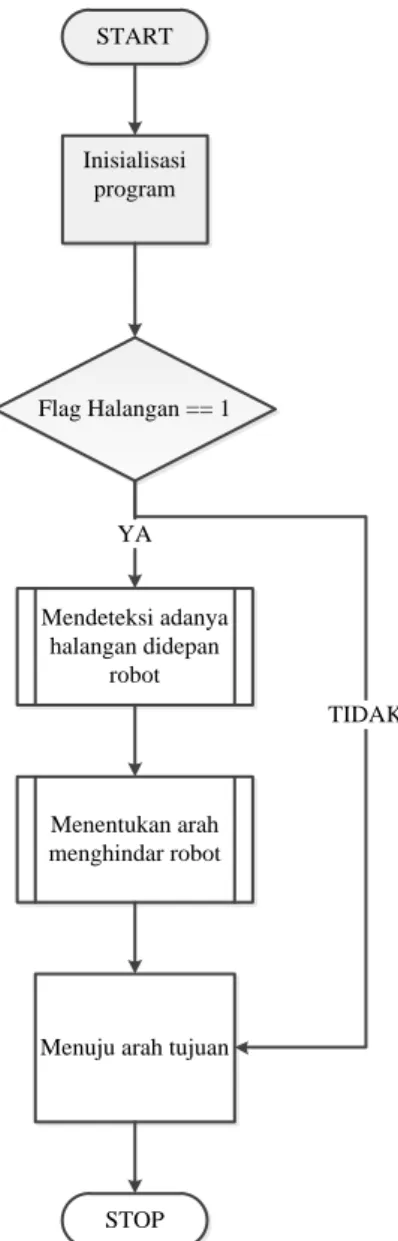
Perancangan perangkat lunak bertujuan untuk mengirimkan data dari pembacaan sensor ultrasonik ke minimum sistem dan juga melakukan pengolahan data dengan melalui proses perhitungan mengubah data dari sensor ultrasound menjadi jarak pada minimum sistem. Minimum sistem memperoleh data dari sensor ultrasound yaitu berupa pulse yang dapat digunakan untuk penentuan jarak antara halangan dengan mobile robot, serta mengatur kecepatan putar roda melalui PWM yang dikirimkan ke driver motor. Perancangan perangkat lunak terbagi dalam beberapa program antara lain : program motor DC, program membaca sensor, program perhitungan mengubah pulsa menjadi satuan jarak dalam centimeter, program penentuan arah menghindar robot. Diagram alir perangkat lunak secara umum dapat dilihat pada Gambar 3.
START Inisialisasi program Mendeteksi adanya halangan didepan robot Menentukan arah menghindar robot Flag Halangan == 1 YA STOP Menuju arah tujuan
TIDAK
Gambar 4 Diagram alir program secara umum
Program Membaca Sensor Ultrasonik
dan Menampilkan Pada LCD
Diagram alir untuk mengetahui jarak benda terhadap mobile robot berdasarkan pembacaan sensor ultrasonik dan ditampilkan ke LCD terdapat pada Gambar 4.
START Inisilisasi Sensor ultrasound Menghitung lebar pulse dan mengubah menjadi data jarak (cm) Data ditampilkan di LCD STOP
Gambar 5 Diagram alir Membaca Sensor Ultrasonik dan Menampilkan Pada LCD Diagram alir pembacaan Jarak benda didiepan sensor ultrasonik dimulai dengan inisialisasi sensor ultrasonik, kemudian melakukan menghitung lebar pulsa, data sensor ultrasonik tersebut disimpan pada sebuah variabel dan data tersebut dimasukkan dalam rumus untuk mengubah pulsa menjadi satuan jarak dan ditampilkan ke LCD..
Program Mendeteksi Halangan Di
Depan Mobile Robot
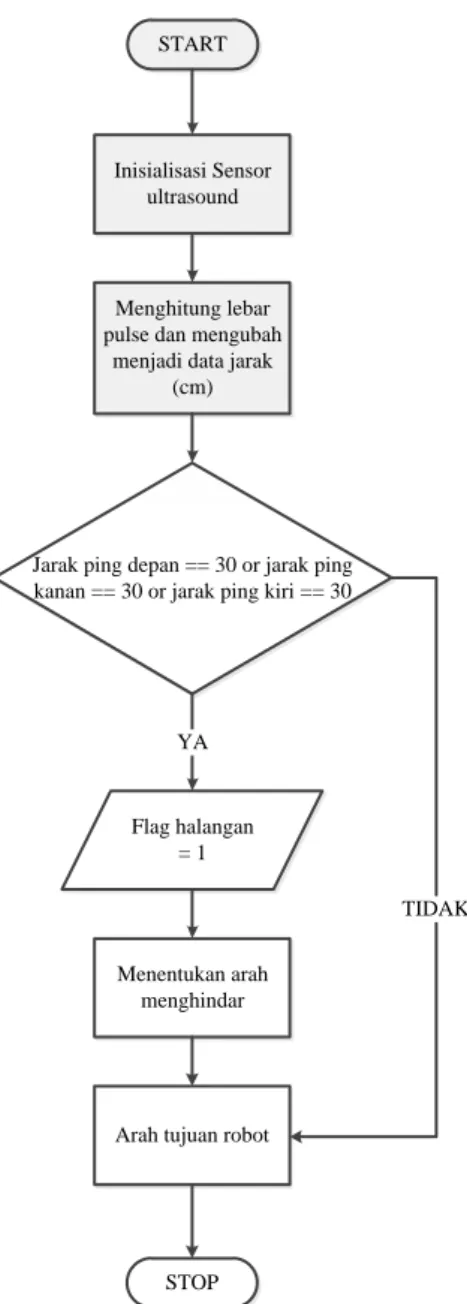
Diagram alir untuk mengetahui jarak antara robot dan benda, setelah menghitung jarak robot dengan benda, robot akan berhenti pada titik tertentu dan menghidupkan flag menghindar untuk menghitung dan menentukan arah menghindar, diagram bloknya terdapat pada Gambar 5.
START
Inisialisasi Sensor ultrasound
Menghitung lebar pulse dan mengubah
menjadi data jarak (cm)
Jarak ping depan == 30 or jarak ping kanan == 30 or jarak ping kiri == 30
Menentukan arah menghindar
Arah tujuan robot
STOP
TIDAK Flag halangan
= 1 YA
Gambar 6 Diagram alir mendeteksi halangan di depan Mobile Robot
Pada gambar 5 Diagram alir pendeteksian halangan dimulai dari menghitung jarak benda terhadap robot, kemudian setelah robot berada di jarak tertentu robot akan menyalakan flag menghindar dan menyalakan flag halangan, robot akan berhenti sejenak dan melakukan perhitungn jarak halangan yang berada di depan robot dan menghitung jarak halangan dan membandingkan jarak antara halangan dengan robot, kemudian melakukan
perhitungan untuk dan menentukan arah menghindar robot.
Program
Penentuan
Arah
Menghindar Pada Mobile Robot
Diagram alir untuk mengetahui Penentuan arah menghindar robot terdapat pada Gambar 6.
Gambar 7 Diagram alir penentuan arah menghindar pada mobile robot
Pada gambar 6 Diagram alir penentuan arah Menghindar pada mobile robot, penentuan arah menghindar pada mobile robot dimulai dengan inisialisasi sensor ultrasonik yang diteruskan dengan perhitungan jarak halangan dan penentuan posisi aman untuk berbelok.
Setelah robot mendeteksi ada halangan pada jarak 30cm robot secara otomatis akan berhenti dan akan menyalakan flag halangan dan flag menghindar, pada jarak ini robot aman untuk berbelok dan menghindar, setelah mendeteksi benda robot akan menghitung jarak halangan yang berada dikiri atau kanan robot.
PENGUJIAN SISTEM
Pengujian ini dilakukan untuk menguji apakah keseluruhan sistem
Menghindari halangan dan menuju arah tujuan ini sudah sesuai dengan keinginan dan kebutuhan pada tugas akhir ini. Pengujian ini meliputi pengujian keseluruhan perangkat keras yang digunakan pada mobile robot dan pengujian keseluruhan pada program yang mendukung sistem menghindari halangan dan menuju arah tujuan ini. Dalam hal ini pengujian dilakukan dengan melakukan koneksi antara semua perangkat keras dan sinkronisasi pada semua program yang telah dibuat untuk melakukan proses ini. Setelah itu proses dilanjutkan dengan melakukan proses download program yang telah disinkronisasi kedalam robot yang sudah siap untuk melakukan proses menghindari halangan dan menuju arah tujuan atau dengan kata lain robot sudah terintegrasi dengan semua sensor yang digunakan. Pengujian ini dinyatakan benar apabila hasil dari sistem navigasi ini sesuai dengan apa yang diinginkan dan dibutuhkan pada tugas akhir ini atau mobile robot berhasil melakukan menghindari halangan dan menuju arah tujuan mobile robotdan dapat menghindari benda lebih dari satu menuju arah tujuan pada lapangan pengujian yang telah disiapkan.
HASIL PENGUJIAN
Pengujian keseluruhan sistem obstacle avoidence pada differential steering mobile robot ini meliputi pengujian penentuan arah menghindar robot dan pemilihan arah menghindar robot dari jarak robot Dengan halangan yang berada di jalur robot. Kemudian mobile robot akan melakukan penyesuaian arah hadap dari arah hadap awal menuju arah hadap koordinat yang akan dituju. Setelah arah hadap robot sudah sesuai dengan arah hadap yang ditentukan robot akan berjalan kearah tersebut, jika robot mendeteksi adanya halangan didepan robot, robot akan menjalankan program menghitung jarak benda terhadap robot pada tiap sensor dan setelah itu robot akan menjalankan program penentuan arah menghindar robot dengan cara membandingkan arah mana yang dapat dilalui robot dan jauh dari halangan untuk
menuju arah tujuan robot. Berikut ini gambar 7 ilustrasi menghindar robot.
Gambar 8 ilustrasi penghindaran
mobile
robot
Hasil pengujian keseluruhan
obstacle avoidance pada differential
steering mobile robot dapat dilihat pada
tabel 1
Tabel
1
Hasil
Pengujian
Arah
Menghindar Mobile Robot
N o Halan gan Arah mengh indar Targe t sudut berbe lok Realisa si sudut berbel ok error Per sent ase erro r 1 Halan gan di kanan Belok Kiri 450 430 20 4,4 % 2 Halan gan di kanan Belok Kiri 450 470 20 4,4 % 3 Halan gan di kanan Belok Kiri 450 440 10 2,2 % 4 Halan gan di kanan Belok Kiri 450 430 20 4,4 % 5 Halan gan di kanan Belok Kiri 450 460 10 2,2 % 6 Halan gan di kanan Belok Kiri 450 480 30 6,6 % 7 Halan gan di kanan Belok Kiri 450 420 30 6,6 % 8 Halan gan di kanan Belok Kiri 450 450 00 0 % 9 Halan gan di kanan Belok Kiri 450 470 20 4,4 % 1 0 Halan gan di kanan Belok Kiri 450 470 20 4,4 % 1 1 Halan gan di kiri Belok kanan 450 430 20 4,4 % 1 2 Halan gan di kiri Belok kanan 450 460 10 2,2 % 1 3 Halan gan di kiri Belok kanan 450 450 00 0% 1 4 Halan gan di kiri Belok kanan 450 470 20 4,4 % 1 5 Halan gan di kiri Belok kanan 450 430 20 4,4 % 1 6 Halan gan di kiri Belok kanan 450 460 10 2,2 %
1 7 Halan gan di kiri Belok kanan 450 460 10 2,2 % 1 8 Halan gan di kiri Belok kanan 450 450 00 0% 1 9 Halan gan di kiri Belok kanan 450 460 10 2,2 % 2 0 Halan gan di kiri Error 450 00 450 100 % 2 1 Halan gan depan kanan Belok Kiri 450 430 20 4,4 % 2 2 Halan gan depan kanan Belok Kiri 450 460 10 2,2 % 2 3 Halan gan depan kanan Belok Kiri 450 480 30 6,6 % 2 4 Halan gan depan kanan Belok Kiri 450 470 20 4,4 % 2 5 Halan gan depan kanan Belok Kiri 450 480 30 6,6 % 2 6 Halan gan depan kanan Belok Kiri 450 460 10 2,2 % 2 7 Halan gan depan kanan Belok Kiri 450 480 30 6,6 % 2 8 Halan gan depan kanan Belok Kiri 450 440 10 2,2 % 2 9 Halan gan depan Belok Kiri 450 460 10 2,2 % kanan 3 0 Halan gan depan kanan Belok Kiri 450 480 30 6,6 % 3 1 Halan gan depan kiri Belok Kanan 450 480 30 6,6 % 3 2 Halan gan depan kiri Belok kanan 450 460 10 2,2 % 3 3 Halan gan depan kiri Belok kanan 450 480 30 6,6 % 3 4 Halan gan depan kiri Belok kanan 450 440 10 2,2 % 3 5 Halan gan depan kiri Belok kanan 450 460 10 2,2 % 3 6 Halan gan depan kiri Belok kanan 450 470 20 4,4 % 3 7 Halan gan depan kiri Belok kanan 450 480 30 6,6 % 3 8 Halan gan depan kiri Belok kanan 450 430 20 4,4 % 3 9 Halan gan depan kiri Belok kanan 450 460 10 2,2 %
4 0 Halan gan depan kiri Belok kanan 450 460 10 2,2 % Total Error 1060 245, 2 %
Rata rata error 2.650 6,13 %
Menurut program untuk berotasi
dan
menghindari
halangan,
robot
berotasi
untuk
menghindari
suatu
halangan dan membentuk sudut 45
derajat agar robot dapat melewati
halangan yang ada didepan robot dengan
aman. Akan tetapi pada table diatas
Pengujian sudut berotasi
Mobile Robot
untuk menghindari halangan, robot
masih mengalami
error
dengan nilai
kurang lebih 1 sampai 3 derajat dengan
rata rata
error
2.65 derajat atau rata rata
error
dari percobaan tersebut sebesar
6,13% dari target, karena patokan
berotasi robot adalah sensor ultrasonik
sebelah kiri atau kanan mendeteksi
benda dengan jarak kurang sama dengan
30 cm dan membentuk sudut 45 derajat,
nilai
error
tersebut diambil dari selisih
target
sudut
berotasi
dengan
realisasinya.
Tabel
2
Hasil
Pengujian
Arah
Menghindar Mobile Robot
No . Awa l (X, Y) Tujua n (X,Y) Jara k (cm) Teruk ur (cm) Erro r (cm) Persenta se Error 1 (0,0) (0,6) 120 121,5 1,5 1,25 % 2 (0,0) (0,6) 120 121,4 1,4 1,16 % 3 (0,0) (0,6) 120 118,7 1,3 1,08 % 4 (0,0) (0,6) 120 122,1 2,1 1,75 % No . Awa l (X, Y) Tujua n (X,Y) Jara k (cm) Teruk ur (cm) Erro r (cm) Persenta se Error 5 (0,0) (0,6) 120 120,6 0,6 0,5 % 6 (0,0) (0,6) 120 119,5 0,5 0,42 % 7 (0,0) (0,6) 120 118,6 1,4 1,16 % 8 (0,0) (0,6) 120 122,9 2,9 2,42 % 9 (0,0) (0,6) 120 118,7 1,3 1,08 % 10 (0,0) (0,6) 120 121,4 1,4 1,16 % 11 (0,0) (0,6) 120 121,5 1,5 1,25 % 12 (0,0) (0,6) 120 117,9 2,1 1,75 % 13 (0,0) (0,6) 120 121,9 1,9 1,58 % 14 (0,0) (0,6) 120 120,7 0,7 0,58 % 15 (0,0) (0,6) 120 122,1 2,1 1,75 % Total Error 22,7 18,89 % Rata-Rata Error 1,51 3 1,26 %
Berdasarkan tabel 2 dapat disimpulkan
bahwa mobile robot mampu menuju ke
koordinat tujuan dan mampu berhenti
pada saat telah mencapai titik tujuan
setelah menghindari halangan sewaktu
menuju titik tujuan dengan nilai rata-rata
total error sebesar 1,513 cm atau 1,26%
dari titik tujuan pada lapangan yang
telah disiapkan untuk penelitian ini.
Perhitungan error pada pengujian ini
dilakukan dengan cara menghitung
selisih antara jarak yang diharapkan dan
jarak
yang
terukur
setelah
robot
melakukan pergerakan menuju koordinat
tujuan. Perhitungan jarak tempuh mobile
robot sesuai dengan hasil perhitungan
jarak dengan menggunakan rumus
Phytagoras yang dibandingkan dengan
update keluaran pada rotary encoder saat
mobile
robot
berjalan
sehingga
menghasilkan jarak tempuh yang harus
dilalui mobile robot untuk mencapai
koordinat tujuan dan dapat menghindari
halangan saat menuju titik tujuan.
KESIMPULAN
Berdasarkan hasil evaluasi yang telah dilakukan dalam pembuatan aplikasi ini dapat disimpulkan bahwa Tugas Akhir ini telah sesuai dengan tujuan awal. Berikut adalah beberapa poin kesimpulan dari pengerjaan tugas akhir ini:
1. Dengan memanfaatkan sensor ultrasonik parallax ping yang terintegrasi pada differential steering mobile robot perancangan sistem obstacle avoidance ini telah berhasil berjalan dengan baik dengan cara mengubah pantulan gelombang menjadi satuan jarak, walaupun akurasi jarak antara benda dan robot dengan jarak sebenarnya masih ada nilai lebih atau nilai error dengan rata - rata error kurang lebih 0,5cm. Faktor lain dikarenakan nilai dari pembacaan sensor ultrasonik yang berubah - ubah dikarnakan beberapa dari sensor ultrasonik sudah tidak begitu peka menangkap pantulan gelombang, sehingga nilai akurasinya begitu berbeda dengan sensor ultrasonik yang lain. 2. Dari hasil percobaan keseluruhan obstacle avoidance robot dapat mendeteksi halangan dan menghindari halangan tersebut dan mencapai titik tujuan telah berjalan dengan baik. Dalam menghindari halangan robot berotasi dan membentuk sudut 45 derajat akan tetapi masih memiliki nilai rata – rata error sebesar 6,13% dan memiliki rata
- rata error jarak sebesar 1,26% dari titik tujuan robot setelah robot menghindari halangan.
DAFTAR PUSTAKA
Sanjaya, M. (2013, maret 17). robot penghindar halangan sensor ultrasonic ping))) (avoider) RA01. Retrieved from profesor bolabot: Goge, Douglas W. ( 1995). A Brief History
of Unmanned Ground Vehicle (UGV) Development Efforts, Unmanned System Magazine, United States of America
.
Hartanti, E. D. (2011). Rancang Bangun Mobile Robot Penjejak Benda Bergerak Berbasis Pengendali PD (Proposional-Derivative)
Menggunakan Mikrokontroler AVR Atmega8535. Semarang: Jurusan Teknik Elektro, Fakultas Teknik Universitas diponegoro.
Mardiana, I. D. (2008). Sistem Penentuan Lokasi Kendaraan Menggunakan GPS Dengan Pemanfaatan SMS Sebagai Komunikasi Data.
Hartanti, E. D. (2011). Tugas Akhir Rancang Bangun Mobile Robot Penjejak Benda Bergerak Berbasis Pengendali PD (Proposional Derivative) Menggunakan