SELF TUNING PI PADA PENGENDALI KECEPATAN PUTARAN MOTOR INDUKSI TIGA FASA TANPA SENSOR KECEPATAN DENGAN KONTROL
VEKTOR ARUS DAN OBSERVER DALAM SUMBU DQ
Raden Irwan Febriyanto (NPM : 0906602982)
Departemen Teknik Elektro, Fakultas Teknik, Universitas Indonesia, Depok 16424, Indonesia Email : [email protected]
Abstrak
Pengaturan kecepatan putaran motor induksi dapat dilakukan dengan menggunakan kontrol vektor arus sebagai salah satu cara untuk memperbaiki performa motor induksi. Metode kontrol vektor dilakukan dengan cara mengestimasi fluks rotor (𝜓𝜓𝑟𝑟) dan posisi rotor
(𝜃𝜃𝑒𝑒). Sedangkan observer digunakan untuk mengestimasi kecepatan putaran motor (𝜔𝜔�𝑟𝑟).
Penggunaan observer pada sumbu d-q bertujuan untuk mengurangi kesalahan yang diakibatkan oleh transformasi sumbu. Salah satu cara untuk meningkatkan performa motor
induksi dapat dilakukan dengan mengatur secara otomatis (self tuning) besarnya konstanta
proposional (Kp) dan konstanta integrator (Ki). Pengaturan tersebut dilakukan dengan menggunakan logika fuzzy dengan metode Mamdani.
1. Pendahuluan
Pada umumnya proses pengaturan kecepatan putaran motor dilakukan dengan menggunakan sensor kecepatan. Namun penggunaannya dinilai kurang efektif karena keterbatasan resolusi sensor sehingga tidak mampu mendeteksi putaran motor dengan presisi [2]. Oleh sebab itu, untuk mengatasi masalah tersebut digunakan sistem perangkat
lunak (software) sehingga pengaturan
kecepatan putaran rotor dapat dilakukan tanpa sensor kecepatan dengan arus motor yang dikendalikan oleh kontrol vektor dan kecepatan putaran motor diestimasi dengan menggunakan observer.
Observer yang akan digunakan untuk mengestimasi kecepatan putaran motor berada pada kerangka acuan rotor (d-q) sehingga memudahkan dalam melakukan pengaturan. Hal tersebut dikarenakan bagian fluks model, dekopling, dan kontroler berada pada kerangka acuan yang sama yaitu kerangka acuan rotor (d-q). Selain itu, untuk
meningkatkan kemampuan sistem dilakukan pula pengendalian logika fuzzy untuk self tuning PI pada pengendali kecepatan.
2. Metode Penelitian
Dalam melakukan pemodelan motor induksi akan digunakan kerangka acuan stator dengan parameter arus stator dan fluks rotor. Pemodelan motor digunakan sebagai pengganti fungsi motor dalam keadaan sebenarnya. Persamaan umum motor induksi adalah sebagai berikut [4] :
𝑉𝑉𝑠𝑠= 𝑅𝑅𝑠𝑠𝑖𝑖𝑠𝑠+ 𝑑𝑑𝑑𝑑𝑑𝑑 𝜓𝜓𝑠𝑠+ 𝑗𝑗𝜓𝜓𝑠𝑠𝜔𝜔𝑒𝑒 (2.1)
𝑉𝑉𝑟𝑟= 𝑅𝑅𝑟𝑟𝑖𝑖𝑟𝑟+ 𝑑𝑑𝑑𝑑𝑑𝑑 𝜓𝜓𝑟𝑟+ 𝑗𝑗𝜓𝜓𝑟𝑟(𝜔𝜔𝑒𝑒− 𝜔𝜔𝑟𝑟) (2.2)
𝜓𝜓𝑠𝑠 = 𝐿𝐿𝑠𝑠𝑖𝑖𝑠𝑠+ 𝐿𝐿𝑚𝑚𝑖𝑖𝑟𝑟 (2.3)
𝜓𝜓𝑟𝑟 = 𝐿𝐿𝑟𝑟𝑖𝑖𝑟𝑟+ 𝐿𝐿𝑚𝑚𝑖𝑖𝑠𝑠 (2.4)
Pada motor induksi jenis rotor sangkar hantarannya terhubung singkat (short circuit) sehingga mengakibatkan tegangan rotornya akan sama dengan nol (𝑉𝑉𝑟𝑟 = 0).
𝜔𝜔𝑠𝑠𝑑𝑑𝑠𝑠𝑑𝑑𝑠𝑠𝑟𝑟 = 0). Berdasarkan persamaan umum
motor induksi maka didapatkan pemodelan motor kerangka acuan stator sebagai berikut :
𝑑𝑑 𝑑𝑑𝑑𝑑𝑖𝑖𝑠𝑠𝑠𝑠 =�− 𝑅𝑅𝑠𝑠 𝜎𝜎𝐿𝐿𝑠𝑠− (1−𝜎𝜎) 𝜎𝜎𝜏𝜏𝑟𝑟 � 𝑖𝑖𝑠𝑠𝑠𝑠+ 𝐿𝐿𝑚𝑚 𝜎𝜎𝐿𝐿𝑠𝑠𝐿𝐿𝑟𝑟𝜏𝜏𝑟𝑟𝜓𝜓𝑟𝑟𝑠𝑠+ 𝐿𝐿𝑚𝑚𝜔𝜔𝑟𝑟 𝜎𝜎𝐿𝐿𝑠𝑠𝐿𝐿𝑟𝑟𝜓𝜓𝑟𝑟𝑟𝑟 + 1 𝜎𝜎𝐿𝐿𝑠𝑠𝑉𝑉𝑠𝑠𝑠𝑠 (2.5) 𝑑𝑑 𝑑𝑑𝑑𝑑𝑖𝑖𝑠𝑠𝑟𝑟 =�− 𝑅𝑅𝑠𝑠 𝜎𝜎𝐿𝐿𝑠𝑠− (1−𝜎𝜎) 𝜎𝜎𝜏𝜏𝑟𝑟 � 𝑖𝑖𝑠𝑠𝑟𝑟− 𝐿𝐿𝑚𝑚𝜔𝜔𝑟𝑟 𝜎𝜎𝐿𝐿𝑠𝑠𝐿𝐿𝑟𝑟𝜓𝜓𝑟𝑟𝑠𝑠 + 𝐿𝐿𝑚𝑚 𝜎𝜎𝐿𝐿𝑠𝑠𝐿𝐿𝑟𝑟𝜏𝜏𝑟𝑟𝜓𝜓𝑟𝑟𝑟𝑟 + 1 𝜎𝜎𝐿𝐿𝑠𝑠𝑉𝑉𝑠𝑠𝑟𝑟 (2.6) 𝑑𝑑 𝑑𝑑𝑑𝑑𝜓𝜓𝑟𝑟𝑠𝑠 = 𝐿𝐿𝑚𝑚 𝜏𝜏𝑟𝑟 𝑖𝑖𝑠𝑠𝑠𝑠− 1 𝜏𝜏𝑟𝑟𝜓𝜓𝑟𝑟𝑠𝑠 − 𝜔𝜔𝑟𝑟𝜓𝜓𝑟𝑟𝑟𝑟 (2.7) 𝑑𝑑 𝑑𝑑𝑑𝑑𝜓𝜓𝑟𝑟𝑟𝑟 = 𝐿𝐿𝑚𝑚 𝜏𝜏𝑟𝑟 𝑖𝑖𝑠𝑠𝑟𝑟+𝜔𝜔𝑟𝑟𝜓𝜓𝑟𝑟𝑠𝑠 − 1 𝜏𝜏𝑟𝑟𝜓𝜓𝑟𝑟𝑟𝑟 (2.8) dengan, 𝜎𝜎=𝐿𝐿𝑠𝑠𝐿𝐿𝑟𝑟−𝐿𝐿2𝑚𝑚 𝐿𝐿𝑠𝑠𝐿𝐿𝑟𝑟 𝜏𝜏𝑟𝑟 =𝐿𝐿𝑅𝑅𝑟𝑟𝑟𝑟
Persamaan tegangan stator pada sumbu d-q dapat dilihat pada persamaan berikut ini, 𝑉𝑉𝑠𝑠𝑑𝑑= 𝑅𝑅𝑠𝑠𝑖𝑖𝑠𝑠𝑑𝑑+ 𝐿𝐿𝑠𝑠𝜎𝜎𝑑𝑑𝑑𝑑𝑑𝑑 𝑖𝑖𝑠𝑠𝑑𝑑+𝐿𝐿𝑠𝑠(1− 𝜎𝜎)𝑑𝑑𝑑𝑑𝑑𝑑 𝑖𝑖̅𝑚𝑚𝑟𝑟 −
𝜔𝜔𝑒𝑒𝐿𝐿𝑠𝑠𝜎𝜎𝑖𝑖𝑠𝑠𝑠𝑠 (2.9)
𝑉𝑉𝑠𝑠𝑠𝑠= 𝑅𝑅𝑠𝑠𝑖𝑖𝑠𝑠𝑠𝑠+ 𝐿𝐿𝑠𝑠𝜎𝜎𝑑𝑑𝑑𝑑𝑑𝑑 𝑖𝑖𝑠𝑠𝑠𝑠+𝐿𝐿𝑠𝑠(1− 𝜎𝜎)𝜔𝜔𝑒𝑒𝑖𝑖̅𝑚𝑚𝑟𝑟 +
𝜔𝜔𝑒𝑒𝐿𝐿𝑠𝑠𝜎𝜎𝑖𝑖𝑠𝑠𝑑𝑑 (2.10)
Pada sistem ini pengendali yang digunakan adalah pengendali PI. Pengendali tersebut hanya dapat mengendalikan sistem yang linier. Berdasarkan persamaan 𝑉𝑉𝑠𝑠𝑑𝑑 dan
𝑉𝑉𝑠𝑠𝑠𝑠 terlihat bahwa pada kedua persamaan
tersebut terdapat bagian yang tidak linier. Oleh sebab itu, diperlukan persamaan dekopling yang berguna untuk memisahkan komponen linier dan non-liniernya. Pemisahan kedua komponen tersebut dapat dilihat pada persamaan berikut ini,
𝑈𝑈𝑠𝑠𝑑𝑑 dan 𝑈𝑈𝑠𝑠𝑠𝑠 merupakan bagian linier dari
tegangan stator setelah dilakukan proses dekopling,
𝑈𝑈𝑠𝑠𝑑𝑑 =𝑅𝑅𝑠𝑠𝑖𝑖𝑠𝑠𝑑𝑑+ 𝐿𝐿𝑠𝑠𝜎𝜎𝑑𝑑𝑑𝑑𝑑𝑑 𝑖𝑖𝑠𝑠𝑑𝑑 (2.11)
𝑈𝑈𝑠𝑠𝑠𝑠 = 𝑅𝑅𝑠𝑠𝑖𝑖𝑠𝑠𝑠𝑠 + 𝐿𝐿𝑠𝑠𝜎𝜎𝑑𝑑𝑑𝑑𝑑𝑑 𝑖𝑖𝑠𝑠𝑠𝑠 (2.12)
𝑉𝑉𝑐𝑐𝑑𝑑 dan 𝑉𝑉𝑐𝑐𝑠𝑠 merupakan bagian non-linier dari
tegangan stator setelah dilakukan proses dekopling,
𝑉𝑉𝑐𝑐𝑑𝑑 =−𝜔𝜔𝑒𝑒𝐿𝐿𝑠𝑠𝜎𝜎𝑖𝑖𝑠𝑠𝑠𝑠+𝐿𝐿𝑠𝑠(1− 𝜎𝜎)𝑑𝑑𝑑𝑑𝑑𝑑 𝑖𝑖̅𝑚𝑚𝑟𝑟 (2.13)
𝑉𝑉𝑐𝑐𝑠𝑠 = 𝜔𝜔𝑒𝑒𝐿𝐿𝑠𝑠𝜎𝜎𝑖𝑖𝑠𝑠𝑑𝑑+𝐿𝐿𝑠𝑠(1− 𝜎𝜎)𝜔𝜔𝑒𝑒𝑖𝑖̅𝑚𝑚𝑟𝑟 (2.14)
Berdasarkan persamaan dekopling tegangan stator dan persamaan umum pengendali PI maka didapat besarnya konstanta proposional (Kp) dan konstanta integrator (Ki) pada sumbu d sebagai berikut :
𝐾𝐾𝑝𝑝𝑑𝑑 =𝐿𝐿𝑇𝑇𝑠𝑠𝜎𝜎𝑖𝑖 𝐾𝐾𝑖𝑖𝑑𝑑 =𝑅𝑅𝑇𝑇𝑠𝑠𝑖𝑖 (2.15)
serta besarnya konstanta proposional (Kp) dan konstanta integrator (Ki) pada sumbu q sebagai berikut :
𝐾𝐾𝑝𝑝𝑠𝑠 =𝐿𝐿𝑇𝑇𝑠𝑠𝜎𝜎
𝑖𝑖 𝐾𝐾𝑖𝑖𝑠𝑠 =
𝑅𝑅𝑠𝑠
𝑇𝑇𝑖𝑖 (2.16)
Persamaan fluks model adalah :
𝑑𝑑 𝑑𝑑𝑑𝑑𝑖𝑖𝑚𝑚𝑟𝑟 = (𝑖𝑖𝑠𝑠𝑑𝑑− 𝑖𝑖𝑚𝑚𝑟𝑟) 𝑅𝑅𝑟𝑟 𝐿𝐿𝑟𝑟 (2.17) 𝑑𝑑 𝑑𝑑𝑑𝑑𝜃𝜃𝑒𝑒 =𝜔𝜔𝑒𝑒 𝜔𝜔𝑒𝑒 =𝑁𝑁𝑝𝑝𝜔𝜔𝑟𝑟+𝑖𝑖𝑠𝑠𝑠𝑠𝐿𝐿𝑟𝑟𝑅𝑅𝑖𝑖𝑟𝑟𝑚𝑚𝑟𝑟 (2.19)
Persamaan kecepatan putaran motor dan torsi adalah [3,4,5] : 𝑇𝑇𝑒𝑒 =𝑁𝑁𝑝𝑝(1− 𝜎𝜎)𝐿𝐿𝑠𝑠𝑖𝑖𝑠𝑠𝑠𝑠𝑖𝑖𝑚𝑚𝑟𝑟 (2.20) 𝑑𝑑 𝑑𝑑𝑑𝑑𝜔𝜔𝑟𝑟 = 𝑇𝑇𝑒𝑒−𝑇𝑇𝑙𝑙 𝐽𝐽 (2.21)
Bentuk model sistem dinyatakan dalam state variabel [4],
𝑥𝑥̇=𝐴𝐴𝑥𝑥+𝐵𝐵𝐵𝐵 (2.22)
𝑦𝑦=𝐶𝐶𝑥𝑥 (2.23)
Bentuk persamaan umum observer [4],
𝑥𝑥�̇=𝐴𝐴̂𝑥𝑥�+𝐵𝐵𝐵𝐵+𝐺𝐺(𝑦𝑦 − 𝑦𝑦�) (2.24)
𝑦𝑦�=𝐶𝐶𝑥𝑥� (2.25)
Simbol “topi” menunjukkan parameter estimasi dan parameter yang tidak menggunakan simbol tersebut menunjukkan
observer yang merupakan faktor pengali error antara nilai keluaran y aktual dengan y estimasi dan besarnya (𝑦𝑦 − 𝑦𝑦�) merupakan nilai kesalahan dalam sistem. Sedangkan pemodelan motor induksi (state space) dalam kerangka acuan rotor (sumbu d-q) sebagai berikut : 𝑥𝑥̇=𝐴𝐴𝑥𝑥+𝐵𝐵𝐵𝐵 𝑑𝑑 𝑑𝑑𝑑𝑑 ⎣ ⎢ ⎢ ⎡𝑖𝑖𝑖𝑖𝑠𝑠𝑑𝑑 𝑠𝑠𝑠𝑠 𝜓𝜓𝑟𝑟𝑑𝑑 𝜓𝜓𝑟𝑟𝑠𝑠⎦ ⎥ ⎥ ⎤ = ⎣ ⎢ ⎢ ⎢ ⎢ ⎢ ⎡−𝜎𝜎𝐿𝐿𝑅𝑅𝑠𝑠𝑠𝑠− (1−𝜎𝜎) 𝜎𝜎𝜏𝜏𝑟𝑟 𝜔𝜔𝑒𝑒 𝐿𝐿𝑚𝑚 𝜎𝜎𝐿𝐿𝑠𝑠𝐿𝐿𝑟𝑟𝜏𝜏𝑟𝑟 𝐿𝐿𝑚𝑚𝜔𝜔𝑟𝑟 𝜎𝜎𝐿𝐿𝑠𝑠𝐿𝐿𝑟𝑟 −𝜔𝜔𝑒𝑒 −𝜎𝜎𝐿𝐿𝑅𝑅𝑠𝑠𝑠𝑠−(1𝜎𝜎𝜏𝜏−𝜎𝜎𝑟𝑟) −𝜎𝜎𝐿𝐿𝐿𝐿𝑚𝑚𝑠𝑠𝜔𝜔𝐿𝐿𝑟𝑟𝑟𝑟 𝜎𝜎𝐿𝐿𝐿𝐿𝑠𝑠𝑚𝑚𝐿𝐿𝑟𝑟𝜏𝜏𝑟𝑟 𝐿𝐿𝑚𝑚 𝜏𝜏𝑟𝑟 0 − 1 𝜏𝜏𝑟𝑟 (𝜔𝜔𝑒𝑒− 𝜔𝜔𝑟𝑟) 0 𝐿𝐿𝑚𝑚 𝜏𝜏𝑟𝑟 −(𝜔𝜔𝑒𝑒− 𝜔𝜔𝑟𝑟) − 1 𝜏𝜏𝑟𝑟 ⎦ ⎥ ⎥ ⎥ ⎥ ⎥ ⎤ ⎣ ⎢ ⎢ ⎡𝑖𝑖𝑖𝑖𝑠𝑠𝑑𝑑 𝑠𝑠𝑠𝑠 𝜓𝜓𝑟𝑟𝑑𝑑 𝜓𝜓𝑟𝑟𝑠𝑠⎦ ⎥ ⎥ ⎤ + + ⎣ ⎢ ⎢ ⎢ ⎡𝜎𝜎𝐿𝐿1𝑠𝑠 0 0 𝜎𝜎𝐿𝐿1 𝑠𝑠 0 0 0 0⎦⎥ ⎥ ⎥ ⎤ �𝑉𝑉𝑉𝑉𝑠𝑠𝑑𝑑 𝑠𝑠𝑠𝑠� (2.26) 𝑦𝑦=𝐶𝐶𝑥𝑥 �𝑖𝑖𝑖𝑖𝑠𝑠𝑑𝑑 𝑠𝑠𝑠𝑠�=� 1 0 0 0 0 1 0 0� ⎣ ⎢ ⎢ ⎡𝑖𝑖𝑖𝑖𝑠𝑠𝑑𝑑𝑠𝑠𝑠𝑠 𝜓𝜓𝑟𝑟𝑑𝑑 𝜓𝜓𝑟𝑟𝑠𝑠⎦ ⎥ ⎥ ⎤ (2.27)
Gain observer ditentukan dengan menggunakan pemodelan motor induksi dalam kerangka acuan rotor dengan persamaan state space sebagai berikut :
𝑑𝑑 𝑑𝑑𝑑𝑑𝑥𝑥�=𝐴𝐴̂𝑥𝑥�+𝐵𝐵𝐵𝐵+𝐺𝐺(𝑖𝑖̅𝑠𝑠− 𝑖𝑖̂𝑠𝑠) (2.28) dengan, 𝐺𝐺 = �𝑔𝑔𝑔𝑔1𝐼𝐼+𝑔𝑔2𝐽𝐽 3𝐼𝐼+𝑔𝑔4𝐽𝐽� 𝐼𝐼 =� 1 0 0 1� 𝐽𝐽=�01 −01�
Nilai eigen dari model motor adalah 𝜇𝜇 sedangkan nilai eigen dari model observer
adalah 𝜆𝜆. Sehingga, besarnya eigen dari
model observer adalah k kali dari nilai eigen model motor. Dengan menggunakan persamaan identitas dan mengasumsikan nilai 𝜔𝜔�𝑒𝑒 = 𝜔𝜔�𝑟𝑟 maka didapat nilai gain observer
sebagai berikut : 𝑔𝑔1=�1−𝑘𝑘𝑘𝑘 �𝜎𝜎𝐿𝐿𝑅𝑅𝑠𝑠𝑠𝑠+𝜎𝜎𝐿𝐿𝑅𝑅𝑟𝑟𝑟𝑟 (2.29) 𝑔𝑔2=�1−𝑘𝑘𝑘𝑘 � 𝜔𝜔�𝑟𝑟 (2.30) 𝑔𝑔3=𝑘𝑘�1+𝑘𝑘−𝜔𝜔�1 𝑟𝑟2𝜏𝜏𝑟𝑟2�� 𝑅𝑅𝑠𝑠𝑅𝑅𝑟𝑟𝜏𝜏𝑟𝑟+𝑅𝑅𝑟𝑟𝐿𝐿𝑠𝑠−𝜔𝜔�𝑟𝑟2𝜏𝜏𝑟𝑟𝜎𝜎𝐿𝐿𝑠𝑠𝐿𝐿𝑟𝑟 𝐿𝐿𝑚𝑚 � (2.31) 𝑔𝑔4=𝑘𝑘(1+𝑘𝑘−𝜔𝜔�𝑟𝑟12𝜏𝜏 𝑟𝑟2)� (𝜎𝜎𝐿𝐿𝑠𝑠𝐿𝐿𝑟𝑟+𝑅𝑅𝑠𝑠𝐿𝐿𝑟𝑟𝜏𝜏𝑟𝑟+𝑅𝑅𝑟𝑟𝐿𝐿𝑠𝑠𝜏𝜏𝑟𝑟)𝜔𝜔�𝑟𝑟 𝐿𝐿𝑚𝑚 � (2.32) Sehingga persamaan motor induksi full order observer adalah : 𝑑𝑑 𝑑𝑑𝑑𝑑𝑖𝑖̂𝑠𝑠𝑑𝑑 =�− 𝑅𝑅𝑠𝑠 𝜎𝜎𝐿𝐿𝑠𝑠− (1−𝜎𝜎) 𝜎𝜎𝜏𝜏𝑟𝑟 � 𝑖𝑖̂𝑠𝑠𝑑𝑑+𝜔𝜔𝑒𝑒𝑖𝑖̂𝑠𝑠𝑠𝑠+� 𝐿𝐿𝑚𝑚 𝜎𝜎𝐿𝐿𝑠𝑠𝐿𝐿𝑟𝑟𝜏𝜏𝑟𝑟� 𝜓𝜓�𝑟𝑟𝑑𝑑+ �𝐿𝐿𝑚𝑚𝜔𝜔�𝑟𝑟 𝜎𝜎𝐿𝐿𝑠𝑠𝐿𝐿𝑟𝑟� 𝜓𝜓�𝑟𝑟𝑠𝑠+� 1 𝜎𝜎𝐿𝐿𝑠𝑠� 𝑉𝑉𝑠𝑠𝑑𝑑+𝑔𝑔1(𝑖𝑖𝑠𝑠𝑑𝑑− 𝑖𝑖̂𝑠𝑠𝑑𝑑)− 𝑔𝑔2(𝑖𝑖𝑠𝑠𝑠𝑠 − 𝑖𝑖̂𝑠𝑠𝑠𝑠) (2.33) 𝑑𝑑 𝑑𝑑𝑑𝑑𝑖𝑖̂𝑠𝑠𝑠𝑠 =−𝜔𝜔𝑒𝑒𝑖𝑖̂𝑠𝑠𝑑𝑑+�− 𝑅𝑅𝑠𝑠 𝜎𝜎𝐿𝐿𝑠𝑠− (1−𝜎𝜎) 𝜎𝜎𝜏𝜏𝑟𝑟 � 𝑖𝑖̂𝑠𝑠𝑠𝑠 − � 𝐿𝐿𝑚𝑚𝜔𝜔�𝑟𝑟 𝜎𝜎𝐿𝐿𝑠𝑠𝐿𝐿𝑟𝑟� 𝜓𝜓�𝑟𝑟𝑑𝑑+ � 𝐿𝐿𝑚𝑚 𝜎𝜎𝐿𝐿𝑠𝑠𝐿𝐿𝑟𝑟𝜏𝜏𝑟𝑟� 𝜓𝜓�𝑟𝑟𝑠𝑠 +� 1 𝜎𝜎𝐿𝐿𝑠𝑠� 𝑉𝑉𝑠𝑠𝑠𝑠+𝑔𝑔2(𝑖𝑖𝑠𝑠𝑑𝑑 − 𝑖𝑖̂𝑠𝑠𝑑𝑑) +𝑔𝑔1(𝑖𝑖𝑠𝑠𝑠𝑠 − 𝑖𝑖̂𝑠𝑠𝑠𝑠) (2.34) 𝑑𝑑 𝑑𝑑𝑑𝑑𝜓𝜓�𝑟𝑟𝑑𝑑 =� 𝑅𝑅𝑟𝑟𝐿𝐿𝑚𝑚 𝐿𝐿𝑟𝑟 � 𝑖𝑖̂𝑠𝑠𝑑𝑑− 𝑅𝑅𝑟𝑟 𝐿𝐿𝑟𝑟𝜓𝜓�𝑟𝑟𝑑𝑑+ (𝜔𝜔𝑒𝑒− 𝜔𝜔�𝑟𝑟)𝜓𝜓�𝑟𝑟𝑠𝑠+ 𝑔𝑔3(𝑖𝑖𝑠𝑠𝑑𝑑− 𝑖𝑖̂𝑠𝑠𝑑𝑑)− 𝑔𝑔4(𝑖𝑖𝑠𝑠𝑠𝑠 − 𝑖𝑖̂𝑠𝑠𝑠𝑠) (2.35) 𝑑𝑑 𝑑𝑑𝑑𝑑𝜓𝜓�𝑟𝑟𝑠𝑠 =� 𝑅𝑅𝑟𝑟𝐿𝐿𝑚𝑚 𝐿𝐿𝑟𝑟 � 𝑖𝑖̂𝑠𝑠𝑠𝑠 −(𝜔𝜔𝑒𝑒− 𝜔𝜔�𝑟𝑟)𝜓𝜓�𝑟𝑟𝑑𝑑− 𝑅𝑅𝑟𝑟 𝐿𝐿𝑟𝑟𝜓𝜓�𝑟𝑟𝑠𝑠+ 𝑔𝑔4(𝑖𝑖𝑠𝑠𝑑𝑑− 𝑖𝑖̂𝑠𝑠𝑑𝑑) +𝑔𝑔3(𝑖𝑖𝑠𝑠𝑠𝑠 − 𝑖𝑖̂𝑠𝑠𝑠𝑠) (2.36)
Untuk mengestimasi kecepatan putaran motor digunakan fungsi kestabilan Lyapunov dengan fungsi kandidat waktu [5]:
𝑉𝑉 =𝑒𝑒𝑇𝑇𝑒𝑒+(𝜔𝜔�𝑟𝑟−𝜔𝜔𝑟𝑟)2
𝑛𝑛 (2.37)
Sistem akan stabil jika turunan fungsi kandidat Lyapunov terhadap waktu lebih kecil dari sama dengan nol. Serta kesalahan dinamik observer akan stabil jika 𝑑𝑑𝑑𝑑𝑑𝑑 𝑉𝑉 adalah definite negative. Nilai gain matrik G bernilai semidefinite negative, karena itu nilai matrik dari 𝑒𝑒𝑇𝑇((𝐴𝐴 − 𝐺𝐺𝐶𝐶)𝑇𝑇𝑒𝑒+ (𝐴𝐴 − 𝐺𝐺𝐶𝐶)𝑒𝑒) akan
bernilai semi definite negative pula. Sehingga didapat nilai estimasi kecepatan putaran motor sebagai berikut :
𝜔𝜔�𝑟𝑟 =𝐾𝐾𝑝𝑝(𝜓𝜓�𝑟𝑟𝑠𝑠𝑒𝑒𝑖𝑖𝑠𝑠𝑑𝑑 − 𝜓𝜓�𝑟𝑟𝑑𝑑𝑒𝑒𝑖𝑖𝑠𝑠𝑠𝑠) +𝐾𝐾𝑖𝑖∫(𝜓𝜓�𝑟𝑟𝑠𝑠𝑒𝑒𝑖𝑖𝑠𝑠𝑑𝑑 − 𝜓𝜓�𝑟𝑟𝑑𝑑𝑒𝑒𝑖𝑖𝑠𝑠𝑠𝑠)𝑑𝑑𝑑𝑑 (2.38)
Pengaturan konstanta PI pada perancangan putaran motor akan menggunakan dua buah logika fuzzy. Masukan dari kedua logika fuzzy tersebut berupa 𝑒𝑒𝜔𝜔𝑟𝑟 (error) dan ∆𝑒𝑒𝜔𝜔𝑟𝑟 (delta error)
sedangkan keluarannya berupa ∆𝐾𝐾𝑝𝑝 (delta
konstanta proposional) dan ∆𝐾𝐾𝑖𝑖 (delta
konstanta integrator). Pada gambar 1 dibawah ini terlihat blok diagram penggunaan self tuning PI dengan pengendalian logika fuzzy dalam menelaah besarnya konstanta PI pada pengendali kecepatan. est r_ ω Speed Referensi + _ ESTIMATOR FUZZY LOGIC r eω r eω ∆ ∆Ki Kp ∆
PI PENGENDALI ARUS (RFOC)
Gambar 1. Blok Diagram Self Tuning PI Dengan Logika Fuzzy
Pengendalian logika fuzzy akan menggunakan metode Mamdani dengan operator AND agar mendapatkan hasil minimum dari komposisi aturan-aturan yang telah ditetapkan. Pada aturan Mamdani terdapat beberapa metode defuzzifikasi yang dapat digunakan, namun pada pembahasan ini menggunakan metode centroid (Composite Moment) sebagai proses defuzzifikasinya
Pada metode centroid, titik berat (Z*) daerah fuzzy didapat dengan persamaan sebagai berikut [1] :
𝑍𝑍
∗=
∫ 𝑍𝑍𝜇𝜇𝑍𝑍 (𝑧𝑧)𝑑𝑑𝑧𝑧∫ 𝜇𝜇𝑍𝑍 (𝑧𝑧)𝑑𝑑𝑧𝑧 (2.39)
3. Hasil Simulasi dan Analisa
Pada simulasi dan analisa kecepatan putaran motor akan dilakukan dengan menggunakan full order observer. Selain itu, akan dilakukan pula pengaturan konstanta proposional (Kp) dan konstanta integrator
(Ki) secara otomatis (self tuning) dengan
menggunakan pengendalian logika fuzzy. Pada simulasi ini akan menggunakan motor induksi tiga fasa dengan nilai parameter sebagai berikut [2]:
Tabel 1. Parameter Motor Induksi Tiga Fasa
Motor Induksi Tiga Fasa (1 HP)
Jumlah Kutub (P) 4 Kutub
Tahanan Stator (Rs) 2.9 Ω Tahanan Rotor (Rr) 2.76 Ω Induktansi Stator (Ls) 0.2349 H Induktansi Rotor (Lr) 0.2349 H Induktansi Magnetik (Lm) 0.2279 H Momen Inersia (J) 0.0436 Kgm2 Koefisien Gesek (B) 0.0005 Nm
Blok diagram sistem dapat terlihat pada gambar 2 dibawah ini,
PI PI + + _ _ + + + + sd i cd V * sd i * sq i DEKOPLING Pers. (2.4.15)–(2.4.16) dan (2.4.19)-(2.4.20) sd U 2 3 PWM M 2 3 dq αβ dq αβ FLUKS MODEL Pers. (2.4.9)–(2.4.12) dq αβ sq U Vcq sd V sq V sq i Ia Ib Ic e θ est r_ ω MOTOR INDUKSI Pers. (2.3.17)–(2.3.20) OBSERVER Pers. (3.2.17)–(3.2.20) FIELD WEAKENING + _ sd V Vsq Speed Referensi e ω m ax s V FUZZY LOGIC PI Err_wr D_Err_wr
Gambar 2. Blok Diagram Full Order Observer Dengan Self Tuning PI
Simulasi akan dilakukan berdasarkan kecepatan referensi dan torsi referensi. Simulasi berdasarkan kecepatan referensi dilakukan untuk melihat kemampuan motor dalam melakukan perubahan kecepatan. Sedangkan simulasi berdasarkan torsi referensi dilakukan untuk melihat kemampuan motor dalam memikul beban.
Pada simulasi berdasarkan perubahan kecepatan, diberikan kecepatan awal pada t = 0 detik sebesar 100 rad/detik kemudian pada t = 4 detik kecepatannya diturunkan hingga mencapai 80 rad/detik selanjutnya pada t = 7
detik kecepatannya diturunkan kembali hingga mencapai 60 rad/detik lalu pada t = 10 detik kecepatannya dinaikkan hingga mencapai 90 rad/detik dan pada t = 13 detik diturunkan kembali hingga mencapai 50 rad/detik. Pada kondisi tersebut torsi beban dibuat nol atau tidak dalam keadaan memikul beban. Hasil simulasi dapat dilihat pada gambar 3 – 14 dibawah ini,
Gambar 3. Kecepatan Putaran Motor
Gambar 4. Arus Stator Sumbu-D Ref.
Gambar 5. Arus Stator Sumbu-D
Gambar 6. Fluks Rotor Sumbu-D
Gambar 7. Arus Stator Sumbu-Q Ref.
Gambar 8. Arus Stator Sumbu-Q
Gambar 9. Fluks Rotor Sumbu-Q
Gambar 10. Torsi Elektromagnetik
Gambar 11. Posisi Sinkron Rotor
0 5 10 15 0 20 40 60 80 100 120 Waktu (Detik) K ec epat an P ut ar an M ot or (Rad/ Det ) Wr Estimasi Wr Aktual Wr Referensi 0 5 10 15 0 0.5 1 1.5 2 2.5 3 3.5 4 Waktu (Detik) A rus S tat or S um bu-D Ref er ens i ( A ) isd_ref 0 5 10 15 0 1 2 3 4 5 6 Waktu (Detik) Aru s St at or Su mb u-D (A) Isd Aktual Isd Estimasi 0 5 10 15 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 Waktu (Detik) Fluk s Rot or S um bu-D ( W b) Fluks-rd Aktual Fluks-rd Estimasi 0 5 10 15 -6 -4 -2 0 2 4 6 Waktu (Detik) A rus S tat or S um bu-Q Ref er ens i ( A ) 0 5 10 15 -8 -6 -4 -2 0 2 4 6 8 Waktu (Detik) Aru s St at or Su mb u-Q (A) Isq Aktual Isq Estimasi 0 5 10 15 -0.15 -0.1 -0.05 0 0.05 0.1 0.15 0.2 0.25 Waktu (Detik) Fluk s Rot or S um bu-Q (W b) Fluks-rq Aktual Fluks-rq Estimasi 0 5 10 15 -10 -8 -6 -4 -2 0 2 4 6 8 10 Waktu (Detik) Tor si E lek trom agnet ik (Nm ) Te Aktual Te Estimasi 0 5 10 15 0 1 2 3 4 5 6 7 8 Waktu (Detik) P os is i S ink ron Rot or (Rad) Theta E Aktual Theta E Estimasi
Gambar 12. Arus Magnetisasi Rotor
Gambar 13. Konstanta Proposional
Gambar 14. Konstanta Integrator
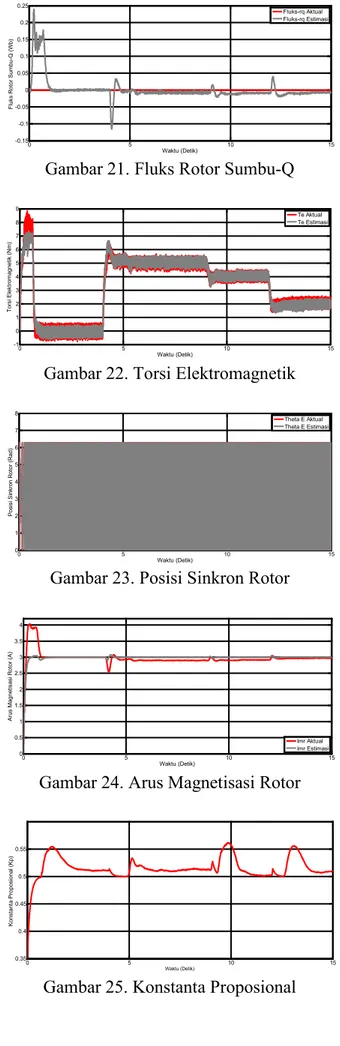
Pada simulasi berdasarkan torsi referensi, diberikan kecepatan awal pada t = 0 detik sebesar 100 rad/detik kemudian pada t = 4 detik diberikan beban sebesar 5 Nm selanjutnya pada t = 9 detik beban tersebut dikurangi hingga mencapai 4 Nm dan pada t = 12 detik beban tersebut dikurangi kembali hingga mencapai 2 Nm. Hasil simulasi dapat dilihat pada gambar 15 – 26 dibawah ini,
Gambar 15. Kecepatan Putaran Motor
Gambar 16. Arus Stator Sumbu-D Ref.
Gambar 17. Arus Stator Sumbu-D
Gambar 18. Fluks Rotor Sumbu-D
Gambar 19. Arus Stator Sumbu-Q Ref.
Gambar 20. Arus Stator Sumbu-Q
0 5 10 15 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 Waktu (Detik) A rus M agnet is as i Rot or (A ) Imr Aktual Imr Estimasi 0 5 10 15 0.35 0.4 0.45 0.5 0.55 Waktu (Detik) K ons tant a P ropos ional ( K P ) 0 5 10 15 0.5 0.6 0.7 0.8 0.9 1 1.1 Waktu (Detik) K ons tant a I nt egr at or (K i) 0 5 10 15 0 20 40 60 80 100 120 Waktu (Detik) K ec epat an P ut ar an M ot or (Rad/ Det ) Wr Estimasi Wr Aktual Wr Referensi 0 5 10 15 0 0.5 1 1.5 2 2.5 3 3.5 4 Waktu (Detik) A rus S tat or S um bu-D Ref er ens i ( A ) isd_ref 0 5 10 15 0 1 2 3 4 5 6 Waktu (Detik) Aru s St at or Su mb u-D (A) Isd Aktual Isd Estimasi 0 5 10 15 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 Waktu (Detik) Fluk s Rot or S um bu-D ( W b) Fluks-rd Aktual Fluks-rd Estimasi 0 5 10 15 -1 0 1 2 3 4 5 6 Waktu (Detik) A rus S tat or S um bu-Q Ref er ens i ( A ) 0 5 10 15 -1 0 1 2 3 4 5 6 7 8 Waktu (Detik) Aru s St at or Su mb u-Q (A) Isq Aktual Isq Estimasi
Gambar 21. Fluks Rotor Sumbu-Q
Gambar 22. Torsi Elektromagnetik
Gambar 23. Posisi Sinkron Rotor
Gambar 24. Arus Magnetisasi Rotor
Gambar 25. Konstanta Proposional
Gambar 26. Konstanta Integrator Pada gambar 4 dan 16 diatas terlihat besarnya arus stator sumbu d referensi (𝑖𝑖∗
𝑠𝑠𝑑𝑑)
pada sistem full order observer dengan dan tanpa self tuning PI diberikan konstan sebesar 3 Ampere dengan nilai yang tidak
dipengaruhi oleh perubahan beban.
Sedangkan besarnya arus stator sumbu d (𝑖𝑖𝑠𝑠𝑑𝑑)
aktual ataupun estimasi terdapat lonjakan arus setiap terjadi perubahan beban motor. Lonjakan arus tersebut terjadi karena
pemodelan motor berada pada sumbu (α − β)
dalam arti pemodelan motor tersebut merepresentasikan keadaan motor yang sebenarnya dan pada kenyataannya ketika kondisi awal motor dijalankan akan terdapat lonjakan arus magnetisasi rotor. Akibat adanya lonjakan arus tersebut maka besarnya
𝜃𝜃𝑒𝑒 akan mengalami perbedaan antara nilai
aktual dengan nilai estimasi. Oleh sebab itu, akan mengakibatkan pula perbedaan arus stator sumbu d aktual dengan estimasinya pada saat terjadi lonjakan arus.
Pada gambar 7 dan 19 diatas terlihat arus stator sumbu q referensi (𝑖𝑖∗
𝑠𝑠𝑠𝑠) pada
sistem full order observer dengan self tuning PI besarnya tidak konstan seperti nilai arus stator sumbu d referensi. Besarnya arus referensi tersebut berpengaruh terhadap perubahan kecepatan putaran motor. Pada saat terjadi kenaikan kecepatan putaran motor dari 0 rad/det menjadi 100 rad/det maka besarnya arus referensi akan bernilai positif berkisar +5 Ampere dan ketika kecepatan putaran motor telah mencapai set point maka arus referensi tersebut akan turun hingga
0 5 10 15 -0.15 -0.1 -0.05 0 0.05 0.1 0.15 0.2 0.25 Waktu (Detik) Fluk s Rot or S um bu-Q (W b) Fluks-rq Aktual Fluks-rq Estimasi 0 5 10 15 -1 0 1 2 3 4 5 6 7 8 9 Waktu (Detik) Tor si E lek trom agnet ik (Nm ) Te Aktual Te Estimasi 0 5 10 15 0 1 2 3 4 5 6 7 8 Waktu (Detik) P os is i S ink ron Rot or (Rad) Theta E Aktual Theta E Estimasi 0 5 10 15 0 0.5 1 1.5 2 2.5 3 3.5 4 Waktu (Detik) A rus M agnet is as i Rot or (A ) Imr Aktual Imr Estimasi 0 5 10 15 0.35 0.4 0.45 0.5 0.55 Waktu (Detik) K ons tant a P ropos ional ( K p) 0 5 10 15 0.5 0.6 0.7 0.8 0.9 1 1.1 Waktu (Detik) K ons tant a I nt egr at or (K i)
mencapai 0 Ampere. Hal tersebut dikarenakan kecepatan putaran motor bergantung pada besarnya arus stator sumbu q referensi sehingga ketika terjadi perubahan nilai pada referensi tersebut maka akan terjadi pula perubahan kecepatan putaran motor. Oleh sebab itu, pengaturan kecepatan putaran motor dapat dilakukan dengan mengubah besarnya arus stator sumbu q referensi.
Berdasarkan hasil simulasi, model aktual dengan model estimasi dari observer sudah menunjukkan respon yang baik. Dalam artian, observer yang digunakan sudah dapat menggantikan fungsi dari sensor kecepatan meskipun pada beberapa grafik terdapat selisih antara nilai aktual dengan estimasinya. Selisih tersebut disebabkan oleh faktor 𝜃𝜃𝑒𝑒,
karena dengan memindahkan observer ke
dalam sumbu d-q maka besarnya nilai 𝜃𝜃𝑒𝑒
akan sangat mempengaruhi nilai dari variabel yang diestimasi. Lain halnya jika observer
yang digunakan berada pada sumbu (α − β)
karena observer tersebut tidak mendapat pengaruh dari besarnya nilai 𝜃𝜃𝑒𝑒. Oleh karena
itu, diperlukan estimasi 𝜃𝜃𝑒𝑒 yang tepat dan
akurat karena kesalahan kecil pada 𝜃𝜃𝑒𝑒 akan
mengakibatkan efek yang besar pada keseluruhan hasil estimasi.
Besarnya konstanta proposional dan integrator yang digunakan observer sebesar Kp = 1.4 dan Ki = 100 pada sistem full order observer dengan self tuning PI. Selain itu, untuk nilai konstanta observer yang paling baik berdasarkan hasil percobaan adalah K_observer = 0.95 dengan nilai estimasi yang paling sesuai terhadap nilai aktualnya.
4. Kesimpulan
Nilai posisi rotor (𝜃𝜃𝑒𝑒) merupakan
faktor terpenting dalam melakukan pengestimasian dengan menggunakan observer pada sumbu d-q karena nilainya sangat mempengaruhi seluruh parameter dan
variabel pada sistem. Selain itu, berdasarkan hasil simulasi perubahan kecepatan ataupun perubahan beban kecepatan putaran motor aktual dapat mengikuti nilai estimasinya dengan baik.
Besarnya konstanta proposional dan integrator pada sistem dengan pengendalian logika fuzzy akan bervariasi bergantung pada selisih antara kecepatan referensi dengan kecepatan estimasinya dan penggunaan waktu cuplik sangat mempengaruhi besarnya error yang terjadi antara nilai aktual dengan nilai estimasinya. Semakin kecil waktu cuplik yang digunakan maka ketelitian sistem akan menjadi lebih tinggi dengan waktu proses simulasi yang lebih lama. Pada simulasi ini
menggunakan waktu cuplik sebesar 10-4
detik.
Daftar Acuan
[1] Ane Prasetyowati, “Pengendalian Adaptif Fuzzy Untuk Self Tuning PI Pada Kontrol Kecepatan Motor Induksi Tiga Fasa Tanpa Sensor Kecepatan Dengan Observer MRAS”, Tesis, Departemen Teknik Elektro UI, November, 2008 [2]
[2] Ridwan Gunawan, “Pengendalian Motor Induksi Tanpa Sensor Kecepatan Dengan Orientasi Fluks Rotor Pada Performansi Kecepatan Diluar Kecepatan nominal”, Disertasi, Departemen Teknik Elektro UI, November, 2006
[3] O. Chee-Mun, Dynamic Simulation of
Electric Machinery, Prentice Hall, New Jersey, 1998.
[4] P. Vas, Electric Machine and Drives: A
Space Vector Theory Approach, Oxford University, New York, 1992
[5] Fery, Pengendali Vektor Arus dan
Perbaikan Kesalahan Estimasi Pada Motor Induksi Tanpa Sensor Kecepatan, Skripsi, Departemen Teknik Elektro, UI, Juli, 2004