Haris Tri Saputra AMIK Tri Dharma Pekanbaru Email : [email protected]
Abstract : This research aims to develop microcontroller applications ATMEGA8535 the fire extinguisher robot. This research was conducted by designing, creating and implementing components - components which include microcontroller system as the controlling process, the sensor flame detector as a fire detection sensors, servo motors as a controller sensor flame detector in search of fire, and the LCD as display information of a fire or not. The results menunujukkan tool created to function properly, it can grow to a larger scale, and
can be included in the race of KRPAI.
Keyword : microcontroller application, ATMEGA 8535, the fire extinguisher robot,
flame detector sensors, proximity sensors, servo motors.
Abstrak : Penelitian ini bertujuan untuk mengembangkan aplikasi mikrokontroler ATMEGA8535 pada robot pemadam api. Penelitian ini dilakukan dengan merancang, membuat dan mengimplementasikan komponen-komponen sistem yang meliputi
mikorokontroler sebagai pengendali proses, sensor flame detector sebagai sensor pendeteksi
api, motor servo sebagai pengontrol sensor flame detector dalam mencari api, dan LCD
sebagai display informasi adanya api atau tidak. Hasil penelitian menunujukkan alat yang dibuat dapat berfungsi dengan baik, dapat dikembangkan untuk skala yang lebih besar, serta dapat diikutkan pada lomba KRPAI .
Kata Kunci : aplikasi mikrokontroler ATMEGA 8535, robot pemadam api, sensor flame
detector, sensor proximity, motor servo
Pendahuluan
Mikrokontroller ATMEGA8535
merupakan keluarga dari AVR (Advance
Versatile RISC). AVR memiliki
keunggulan dibandingkan dengan
mikrokontroller lain, keunggulan
mikrokontroler AVR yaitu AVR memiliki kecepatan eksekusi program yang lebih cepat karena sebagian besar instruksi
dieksekusi dalam 1 siklus clock, lebih
cepat dibandingkan dengan
mikrokontroller MCS51 yang memiliki
arsitektur CISC(Complex Instruction Set
Compute) dimana mikrokontroler MCS51
membutuhkan 12 siklus clock untuk
mengeksekusi satu instruksi. Selain itu, mikrokontroller AVR memiliki fitur yang lengkap (ADC internal, EEPROM internal,
Watchdog, Timer, PWM, Port I/O,
Komunikasi serial, Komparator, I2C, dan
lain-lain). Kelebihan lain dari AVR juga dari segi bahasa pemrogramannya yang mana mikrokontroller biasa menggunakan bahasa pemrograman assembler tetapi
mikrokontroler AVR sudah bisa
menggunakan bahasa pemrograman C, C++, dan bascom. Oleh karena itu penulis menggunakan suatu mikrokontroller untuk merancang robot yang berfungsi sebagai
robot pemadam api dengan
menggabungkan konsep line follower.
HASIL DAN PEMBAHSAN Desain Robot
Bentuk dari sistem robot pemadam api ini secara umum terdiri atas sistem mekanik dan rangkaian elektronik. Gerakan dari sistem mekanik akan ditentukan oleh
gerakan simulasi yang digunakan,
sedangkan rangkaian elektronika berfungsi 64
untuk memberikan data berupa sinyal yang akan diproses oleh mikrokontroller sesuai logika program yang yang dirancang. Context Diagram
0
Sistem Robot Pemadam Api
Sound activasi
Flame Detector Sinyal Digital
Motor DC 2 buah(Kiri dan Kanan MC ATMega8535 Kipas Modul program Execute Instruksi Data Instruksi Sinyal Digital Sinyal Digital
Sensor Proximity Sinyal Digital
Sinyal Digital
LCD
Sinyal Digital
Motor Servo
Sinyal Digital
Gambar 1. Bentuk Robot Sesuai dengan penamaanya maka
proses ini akan mengolah data input
menjadi data output. Proses ini akan
berinteraksi dengan beberapa entity yaitu :
1. Sound Activation
Sound Activation berfungsi sebagai
input mengaktifkan robot.
2. Mikrokontroller ATMEGA8535
Berfungsi sebagai otak dari robot pemadam api.
3. Sensor Flame Detector
Sensor ini berfungsi sebagai
pendeteksi ada atau tidak adanya api
yang disimulasikan dengan
menggunakana api lilin.
4. Sensor Proximity
Sensor ini berfungsi untuk mendeteksi garis hitam yang ada di depan ruangan
5. Motor DC
Motor ini berfungsi sebagai penggerak roda.
6. Motor Servo
Motor ini berfungsi sebagai
pengontrol sensor Flame Detector
dalam mencari api.
7. LCD
LCD ini berfungsi sebagai display
informasi ada atau tidaknya api.
8. Kipas
Kipas ini berfungsi untuk
memadamkan api, dan menggunakan motor DC.
9. Modul Program
Dalam hal ini, program yang
digunakan adalah bahasa pemograman
C menggunakan software Code Vision
AVR. Jadi seluruh proses input/output
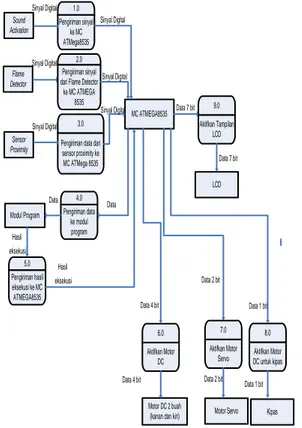
dikendalikan oleh program. Data Flow Diagram
Data flow diagram merupakan
gambaran sistem secara logika,
gambaran ini tergantung pada perangkat keras, perangkat lunak, struktur data
atau data organisasi file. Untuk
mengetahui aliran data yang terjadi pada sistem ini dapat kita lihat pada gambar berikut. Sound Activation 1.0 Pengiriman sinyal ke MC ATMega8535 Sinyal Digital MC ATMEGA8535 Flame Detector Sensor Proximity 2.0 Pengiriman sinyal dari Flame Detector
ke MC ATMEGA 8535 Sinyal Digital
3.0 Pengiriman data dari sensor proximity ke MC ATMega 8535 4.0 Pengiriman data ke modul program Data Modul Program Data 5.0 Pengiriman hasil eksekusi ke MC ATMEGA8535 Hasil eksekusi Hasil eksekusi 6.0 Aktifkan Motor DC Motor DC 2 buah (kanan dan kiri) Data 4 bit 7.0 Aktifkan Motor Servo Data 2 bit Motor Servo Data 2 bit 8.0 Aktifkan Motor DC untuk kipas Kipas Data 1 bit Data 1 bit 9.0 Aktifkan Tampilan LCD Data 7 bit LCD Data 7 bit Sinyal Digital Sinyal Digital Sinyal Digital Sinyal Digital Data 4 bit
Gambar 2. Data Flow Diagram
a. Secara umum, rancangan fisik alat
ini dapat dikelompokkan beberapa bagian, yaitu :
1. Rangkaian sistem minimum
mikrokontroller ATMEGA
2. Mikrokontroller ATMEGA 8535
3. Sensor Flame Detector
4. Sensor Proximity
5. LCD
6. Motor Servo
7. Motor DC
8. Kipas
Bentuk Robot dapat dilihat pada gambar berikut:
Gambar 3. Bentuk Robot
b. Cara Kerja Robot
Bentuk dari robot ini terdiri dari sistem mekanik dan rangkaian elektronika. Sistem akan aktif
ketika rangkaian dihubungkan
dengan battery dan diaktifkan
dengan sound. Setelah robot aktif, maka sensor pembaca garis (sensor
proximity). Kemudian, robot akan
masuk ke sebuah ruangan, dan jika
sensor proximity mendeteksi garis
hitam, robot akan berhenti. Setelah
itu, motor servo mengontrol Flame
Detector mencari api yang
disimulasikan menggunakan lilin. Jika ada api, maka kipas akan aktif dan LCD menampilkan informasi ada api. Jika tidak terdeteksi api,
kipas tidak aktif dan LCD
menampilkan informasi tidak ada api.
Hasil Pengujian
Pengujian dari sistem Robot Pemadam Api ini dapat dilakukan dengan langkah-langkah sebagai berikut:
1. Pasang power supply dan baterai
untuk menghidupkan sistem pada robot.
2. Dekatkan buzzer dengan mic
condenser sesuai gambar dibawah ini, lalu bunyikan buzzer. Mic condenser dan buzzer berfungsi sebagai sound activation pada robot ini.
Gambar 4. Robot Aktif
3. Robot akan maju setelah mic condenser
menerima input dari suara buzzer. Jika
sensor proximity pada robot masih
membaca lantai berwarna putih, maka robot akan terus maju, sesuai gambar di bawah ini
4. Robot akan berhenti jika sensor proximity pada robot membaca garis berwarna hitam, yang artinya robot telah berada di depan ruangan yang ada api yang disimulasikan menggunakan api lilin. Kemudian, motor servo yang mengontrol sensor Flame Detector akan berputar 90 derajat.
Gambar 6. Robot Mendeteksi Garis Hitam 5. Robot akan mencari api menggunakan
motor servo yang mengontrol
pergerakan Flame Detector dalam
mencari api.
Gambar 7. Saat Robot Mencari Api 6. Jika api pada lilin terdeteksi, maka
motor servo berputar 180 derajat dan kipas akan aktif untuk mematikan api pada lilin.
Gambar 8. Saat Robot Mendeteksi dan Memadamkan Api
7. Walaupun robot telah memadamkan
api, motor servo akan terus berputar seperti dia mencari api. Jika putarannya telah selesai, maka robot akan mundur. SIMPULAN
Berdasarkan analisa kerja alat dari sistem yang dirancang maka dapat ditarik kesimpulan sebagai berikut :
1. Aplikasi Robot Pemadam Api ini
menggunakan beberapa entity didalam
menunjang sistem, yaitu sensor Flame
Detector, sensor proximity, motor
servo, motor DC, LCD, Sound
Activation, dan mikrokontroler
ATMEGA8535.
2. Sensor Flame Detector hanya mampu
mendeteksi api yang disimulasikan dengan api(lilin) jarak maksimal 30 cm.
3. Sensor Flame Detector ini dapat
mendeteksi api jika api berhadapan lurus dengan sensor ini.
4. Putaran motor DC pada robot masih
lambat dikarenakan torsi motor yang tidak seimbang dengan berat robot. Saran
Berdasarkan pengalaman yang
diperoleh selama perancangan,
pembuatan dan uji coba alat ini, ada beberapa kendala yang dihadapi dan disini akan disampaikan beberapa saran yang bermanfaat untuk pengembangan
dan penyempurnaan rancangan alat ini selanjutnya.
1. Semua komponen yang dibutuhkan
dalam perancangan sistem ini dalam keadaan baik atau dapat bekerja sebagaimana mestinya.
2. Selain menggunakan LCD sebagai
indikator adanya api, dapat juga menggunakan aplikasi suara sebagai pilihan alternatif.
3. Pemanfaatan sumber daya dengan daya
tahan arus yang lebih lama sangat dibutuhkan jika Robot Pemadam Api digunakan dalam waktu lama.
4. Menyediakan soket-soket IC dalam
perakitan, karena bila dalam
penyolderan langsung pada pin-pin IC memungkinkan besar IC tersebut akan rusak. Setelah penyolderan periksa kembali hasil solderan tersebut, apakah telah terhubung ke komponen dengan baik melalui multitester.
DAFTAR RUJUKAN
[1]. Pitowano,Endra(2006), “Robotika:
Desain, Kontrol, dan Kecerdasan Buatan”. Yogyakarta: Andi.
[2]. Rohan Chadha (2012), “Permanent
Magnet DC Motor Control Using Image Processing.”, International Journal of Advanced Research in Computer Science and Electronics Engineering (IJARCSEE), ISSN: 2277 – 9043, Volume 1, Issue 8. Hlm. 95-98.
[3]. Vivek. H, Sahadev. R, and Santanu.
M (2013), “Low Cost Obstacle
Avoidance Robot”. International
Journal of Soft Computing and
Engineering. ISSN: 2231-2307,
Volume-3, Issue-4, Hlm. 52-55.
[4]. Wardhana, Lingga (2006), “Belajar
Sendiri Mikrokontroler AVR Seri ATMega 8535”, Yogyakarta: Andi.
[5]. Ricardo Carreli and Eduardo Freire
(2003), “Corridor navigation and wall-following stable control for
sonar-based mobile robots.”,
Robotics And Autonomous System. Hlm. 235-247.