Perancangan Sistem Deteksi Objek Secara Real-Time Menggunakan Metode YOLO (You Only Look Once) Pada Robot Al-
Mubarok_MK4
Muhammad Lutfi Aziz1, Rama Okta Wiyagi2, Muhamad Yusvin Mustar3
1,2,3Teknik Elektro, Fakultas Teknik, Universitas Muhammadiyah Yogyakarta, Yogyakarta, Indonesia, 55183
[email protected] Abstrak
Robot Al-Mubarok_MK4 merupakan robot drone tanpa awak menggunakan sensor kamera, dan sistem pengolahan citra dengan metode color tracking sebagai pendeteksi dropzone berwarna orange dan berbentuk kotak. Akan tetapi metode color tracking masih memiliki kekurangan dan batasan dalam hasil pengolahan citra pada waktu yang dinamis (pagi, siang, dan sore) saat mendeteksi dropzone.
Sistem pendeteksi objek merupakan salah satu hal yang penting dalam mencari objek dropzone pada robot. Oleh sebab itu, sistem yang akan digunakan pada penelitian ini untuk mengembangkan sistem pendeteksi objek pada robot Al-Mubarok_MK4 adalah sistem pendeteksi objek menggunakan metode YOLO (You Only Look Once) dengan menerapkan konsep sistem pelatihan yang dibangun menggunakan jaringan saraf tiruan. Penggunaan metode YOLO bertujuan untuk mengenali objek yang dideteksi secara spesifik seperti ukuran, warna, maupun bentuk pada waktu yang dinamis. Berdasarkan hasil pengujian, metode yang diteliti dapat mendeteksi objek dropzone pada keadaan waktu dinamis dengan sangat baik yaitu rata-rata tingkat keberhasilan deteksi yang diuji secara offline pagi sebesar 86,7%, siang 66,5%, dan sore 85.1%, sedangkan metode color tracking hanya dapat mendeteksi pada keadaan waktu pagi saja yang memiliki total rata-rata tingkat keberhasilan deteksi sebesar 43,6% dari seluruh pengujian dengan waktu dinamis. Kemudian, pengujian metode YOLO dilakukan secara real-time pada keadaan waktu dinamis, dan dengan perbedaan parameter tinggi memiliki tingkat akurasi keberhasilan deteksi, yaitu pada ketinggian ±150cm pagi sebesar 79,5%, siang 80,8%, dan sore 65,6%. Sedangkan pada ketinggian ±180cm pagi sebesar 79%, siang 86,7%, dan sore 79.3%. Bahwa pada metode yang dikembangkan ini juga dapat diaplikasikan pada UAV (Unmanned Aerial Vehicle) lain.
Kata kunci: KRTI, VTOL, vertical take-off and landing, pesawat tanpa awak, jaringan saraf tiruan, color tracking
PENDAHULUAN
Pesawat tanpa awak atau UAV (Unmanned Aerial Vehicle) adalah wahana terbang nir-awak yang sedang berkembang dengan pesat dibidang riset sistem nir-awak (unmanned system) di dunia. Robot Al-Mubarok_MK4 merupakan
salah satu robot drone quadcopter tanpa awak yang dibuat oleh mahasiswa Teknik Elektro Universitas Muhammadiyah Yogyakarta untuk menyelesaikan misi yaitu mencari objek dropzone dan menjatuhkan 7 logistik disetiap dropzone tersebut secara full autonomous.
Dropzone adalah objek kotak berukuran 2meter x 2meter berwarna orange di tujuh titik koordinat yang berbeda, yang berfungsi sebagai tempat atau titik penjatuhan logistik.
Untuk menyelesaikan misi dengan baik, maka robot ini dipasang sebuah sensor yang dapat mendeteksi sebuah warna dan atau objek.
Robot Al-Mubarok_MK4 menggunakan sensor kamera dan sistem pengolahan citra dengan metode color tracking dalam mendeteksi dropzone. Aka n tetapi dengan metode color tracking masih memiliki kekurangan dan batasan dalam hasil pengolahan citra tersebut. Metode color tracking menggunakan sistem kalibrasi warna HSV (Hue Saturation Value) pada objek yang ingin dideteksi, untuk mengetahui nilai warna HSV pada objek tersebut, dan memiliki batasan tresholding yang tetap. Metode color tracking ini cukup baik dalam pembacaaan warna, akan tetapi terdapat kekurangan saat kondisi sinar matahari berbeda, yaitu pagi, siang, ataupun sore, sensor kamera tidak mendeteksi warna yang sudah di kalibrasi HSV sebelumnya, sehingga ketika menjalankan misi terjadi kesalahan deteksi warna yang sudah ditentukan, dan harus selalu dikalibrasi ulang HSVnya disetiap perbedaan waktu.
Penelitian ini menawarkan sebuah solusi untuk menyelesaikan permasalahan tersebut, yaitu perancangan sistem pendeteksi objek menggunakan metode You Only Look Once (YOLO) pada robot Al-Mubarok_MK4. Pada metode YOLO menggunakan konsep pengenalan objek dengan membuat bobot latih sebelum melakukan deteksi objek. Bobot latih tersebut didapat dari hasil pelatihan dataset objek yang ingin dideteksi. Dengan sistem pelatihan YOLO ini, diharapkan akan lebih baik dalam mengenali objek yang ingin dideteksi secara spesifik seperti ukuran, warna, maupun bentuk, sehingga tidak perlu dilakukannya kalibrasi ulang warna terus-menerus setiap waktu.
Kemudian bahwa metode yang dikembangkan ini juga dapat diaplikasikan pada UAV (Unmanned Aerial Vehicle) lain.
KAJIAN LITERATUR
Beberapa penelitian terkait digunakan sebagai bahan acuan dalam melakukan penelitian yaitu Rui Shi, Tianxing Li, Yasushi Yamaguchi (2020), melakukan penelitian dalam
menyelesaikan masalah untuk mendeteksi buah dengan waktu lokalisasi di kebun, dengan tema penelitiannya An attribution-based pruning method for real-time mango detection with YOLO network. Penelitian ini mendeteksi objek berupa buah mangga secara akurat dengan real-time menggunakan jaringan metode YOLOv3, hasil yang diperoleh dengan metode ini dapat mengidentifikasi karnel konvolusional yang sesuai dengan target. Jaringan yang dihasilkan merupakan skala dan rotasi jaringan deteksi mangga invarian mencapai skor F1 0,944 dengan 2,6 GFLOPs (giga-floating point operations). Dibandingkan dengan jaringan finetuned tanpa pemangkasan, perhitungan jaringan berkurang 68,7% sedangkan akurasinya meningkat 0,4%. Dibandingkan dengan jaringan mutakhir yang dilatih dengan set data mangga yang sama, perhitungan dikurangi sebesar 83,4% dengan hanya kehilangan akurasi sekitar 2,4% (Shi, Li, and Yamaguchi 2020).
Yonten Jamtsho, Panomkhawn Riyamongkol, Rattapoom Waranusast melakukan penelitian tentang Real- time Bhutanese license plate localization using YOLO.
Hasil dari penelitian ini, Convolutional Neural Network memberikan rata-rata presisi dengan rata-rata keseluruhan 98,6% dengan hilangnya pelatihan 0,0231 untuk kendaraan dan LP (Jamtsho, Riyamongkol, and Waranusast 2019).
YOLO (You Only Look Once)
YOLO adalah salah satu metode deteksi objek end-to-end berdasarkan kandidat non-regional. Metode YOLO menerapkan CNN (Convolutional Neural Network) atau jaringan saraf tunggal ke gambar penuh. Jaringan ini membagi gambar menjadi daerah dan memprediksi kotak pembatas dan probabilitas untuk setiap wilayah. Kotak pembatas ini diberi bobot oleh probabilitas yang diprediksi.
Algoritma YOLO mengintegrasikan kedua tugas ke dalam model jaringan saraf tunggal untuk mencapai deteksi yang cepat dan akurat tinggi. YOLO mengubah deteksi objek untuk mengekstraksi fitur dari gambar secara langsung dan menghitung kotak pembatas dan probabilitas dari kategori, kemudian memperoleh kategori objek dan informasi posisi.
YOLO mengadopsi dari CNN (Convolutional Neural Network) tunggal untuk memprediksi beberapa kotak pembatas dan probabilitas dari kategori. (Lu et al. 2019) Arsitektur YOLO memiliki 24 lapisan konvolusional dan 2 lapisan yang terhubung penuh. Arsitektur lapisan ditampilkan pada gambar Gambar 1.
Gambar 1. Arsitektur Lapisan YOLO
YOLO mengambil gambar input dan mengubah ukurannya menjadi 448×448 piksel. Gambar lebih lanjut melewati
jaringan konvolusional dan memberikan output dalam bentuk tensor 7×7×30. Tensor memberikan informasi tentang koordinat persegi panjang kotak pembatas dan distribusi probabilitas di semua kelas yang dilatih sistem.
Mengubah nilai keyakinan (probabilitas) ini menghilangkan label kelas yang nilainya kurang dari 30% (Shinde, Kothari, and Gupta 2019).
METODE PENELITIAN
Pada penelitian ini membuat sebuah prototipe yang mewakili keadaan seperti robot Al-Mubarok_MK4 dibagian pengambilan deteksi objeknya (seperti: kamera dan mini PC). Penelitian ini dilakukan pada bulan februari - juli 2020. Metode YOLO memiliki beberapa proses sebelum pengujian yaitu sistem pelatihan yang dibangun menggunakan jaringan saraf tiruan tensorflow dari dataset yang telah diambil berupa objek dropzone. Dataset merupakan rekaman video objek dropzone pada waktu pagi, siang dan sore di lapangan Bintang dan Bola Universitas Muhammadiyah Yogyakarta. Hasil dari pelatihan/training berupa weight (bobot terlatih) yang akan dimasukan pada program metode YOLO. Kemudian akan diuji dengan membandingkan hasil dari metode sebelumnya yaitu color tracking secara offline pada data rekaman yang sama.
Proses color tracking dengan melakukan kalibrasi warna HSV pada objek diwaktu pagi, yang kemudian nilai tersebut dimasukan pada program metode color tracking sebagai nilai acuan warna deteksi pada objek. Hasil pengaturan terbaik dari metode YOLO secara offline akan dijadikan acuan pada pengujian metode YOLO secara real-time. Data pengujian secara offline dan real-time diambil di Lapangan Ampera Purwodadi, Gisting, Tanggamus, Lampung, pada waktu pagi, siang, dan sore, dan dengan menambahkan beberapa pengaturan, seperti: white balance, resolusi kamera, dan nilai ambang batas (threshold).
ALAT DAN BAHAN
Pada melakukan penelitian ini, membutuhkan alat dan bahan agar penelitian ini bisa berjalan dengan yang diharapkan. Adapun alat dan bahan yang dibutuhkan hardware berupa:
PC sebagai perangkat training
Tabel 1. Spesifikasi Komputer Untuk Men-Training Dataset
Laptop sebagai perangkat penguji
Tabel 2. Spesifikasi Laptop untuk Penguji Deteksi Objek
Webcam sebagai pengambil citra
Tabel 3. Spesifikasi Kamera Pengambilan dan Pengujian Data
Dropzone dengan ukuran 50cm x 50cm berwana orange Tripot sebagai dudukan Webcam
Adapun software yang dibutuhkan pada penelitian ini berupa:
Python openCV
Framework darkflow CMD (command prompt)
PERANCANGAN PERANGKAT LUNAK
Perancangan perangkat lunak merupakan perancangan program deteksi objek pada metode YOLO dan color tracking untuk mendeteksi objek dropzone dengan menghitung jumlah keberhasilan deteksi disetiap data rekaman pengujian. Adapun flowchart perancangan program untuk mendeteksi objek dengan metode YOLO, sebagai berikut:
Processor Intel(R)
Core(TM) i5- 4440 CPU
@3.10GHz 3.10GHz
Speed 3.10GHz
VGA GeForce 820M
NVIDIA
RAM 8,00 GHz
Tipe sistem 64 bit
Operating System
Windows 10 Pro
Processor Intel(R) Core(TM) i3- 4005U @1.70GHz 1.70GHz
Speed 1.70GHz
VGA GeForce 820M
NVIDIA Ukuran layar 14,5 Inch
RAM 4,00 GHz
Tipe sistem 64 bit
Operating System Windows 10 Pro
Resolusi Video Full Hd (1920x1080) Hd (1280x720) Bidang Pandang Diagonal 69 derajat
Lensa Pelastik
Fokus Kamera autofocus Auto-Light Corection RightLight 2 Dimensi 68,5 * 29 * 40,4 mm Berat Total 88 gram
Mikrofon 1 mikrofon omni-directional
Gambar 2. Flowchart Perancangan Program YOLO Sedangkan flowchart program metode color tracking, sebagai berikut:
Gambar 3. Flowchart Perancangan Program Color Tracking
PERLAKUAN PENGUJIAN SECARA OFFLINE
Tujuan perlakuan dalam pengujian data secara offline ini adalah untuk mencari tingkat keberhasilan deteksi antara pelatihan YOLO dan color tracking. Kemudian hasil pengujian ini, untuk dianalisis berupa ketahanan metode dalam menjaga deteksi objek diwaktu yang Hasil data pengujian ini, berupa data yang terdapat citra objek dropzone dalam pengujian yang dilakukan dengan melakukan pengeditan pada frame data rekaman video, bertujuan agar mendapatkan tingkat akurasi keberhasilan deteksi pada objek dropzone. Adapun skematik pengambilan data secara offline pada metode yang dilakukan saat pengujian:
Gambar 4. Skematik Pengambilan Data secara Offline Selain metode YOLO memerlukan training/pelatihan, metode color tracking memerlukan perlakuan kalibrasi nilai HSV pada objek disetiap mode white balance (WB) yang digunakan pada waktu pagi. Berikut adalah hasil kalibrasi nilai HSV pada metode color tracking:
Sebelum
Sesudah
Gambar 5. Contoh Hasil Sebelum dan Sesudah Kalibrasi Nilai HSV pada WB Daylight 5751 kelvin
PERLAKUAN PENGUJIAN SECARA REAL-TIME Perlakuan dalam menguji metode YOLO dilakukan secara real-time atau secara langsung. Pengujian ini dilakukan setelah mendapatkan pengaturan pengambilan data yang terbaik dari pengujian secara offline sebelumnya.
Pengaturan tersebut akan dimasukan kedalam program metode YOLO seperti resolusi kamera, white balance maupun nilai threshold. Pengujian data secara real-time pada waktu dinamis, dan perbedaan parameter tinggi kamera dalam pengambilan data. Parameter tinggi tersebut adalah tinggi acuan robot Al-Mubarok_MK4 dalam mencari objek dropzone untuk menjatuhkan logistik. Hasil data pengujian ini, berupa data keseluruhan dalam
Mulai
If Keyboard : q
Inisiasi ret dan frame
Selesai Ret dan frame
Terpenuhi?
Ya Menyimpan Video
Tidak
Output “Tampilan hasil deteksi pada frame”
Result antara menu options dengan frame
Output keberhasilan Result
“not” atau “deteksi”
Input pengaturan YOLO (model, bobot terlatih, label, threshold, GPU) dan
input Video
Ya
Tidak
Mulai
If Keyboard : q Menyimpan Video
Selesai Inisiasi frame
Kontur ditemukan?
Output keberhasilan kontur
“not detek” atau “detek”
Input Nilai Kalibrasi HSV dan Video
Output “ Tampilan Circle deteksi pada frame”
Ya
Tidak
Ya Tidak
User Komputer Program Rekaman
Video
Hasil
pengujian yang dilakukan tanpa melakukan pengeditan seperti pengujian data offline. Adapun skematik pengujian data secara real-time, sebagai berikut:
Gambar 6. Skematik Sistem Deteksi Objek secara Real- time
HASIL DAN PEMBAHASAN
PENGUJIAN PROGRAM METODE YOLO SECARA OFFLINE
Pengujian program metode YOLO dilakukan dengan memberikan input berupa data rekaman video yang telah diambil, bobot latih yang telah diuji sebelumnya, dan nilai threshold yang akan digunakan yakni YOLO tanpa threshold, 0.1, dan 0.2. Pengujian pada metode YOLO juga dilakukan menggunakan beberapa pengujian yang berbeda pada white balance dan resolusi kamera yang digunakan saat perekaman.
Gambar 7. Grafik Hasil Pengujian Metode YOLO Mode WB Auto, dan Resolusi 640x480
Gambar 8. Grafik Hasil Pengujian Metode YOLO Mode WB Auto, dan Resolusi 752x416
Gambar 9. Grafik Hasil Pengujian Metode YOLO Mode WB 5751 Kelvin, dan Resolusi 640x480
Gambar 10. Grafik Hasil Pengujian Metode Yolo Mode WB 5751 Kelvin, dan Resolusi 752x416
Gambar 11. Grafik Hasil Pengujian Metode Yolo Mode WB 6000 Kelvin, dan Resolusi 640x480
Gambar 12. Grafik Hasil Pengujian Metode Yolo Mode WB 6000 Kelvin, dan Resolusi 752x416
Berdasarkan grafik hasil pengujian pada metode YOLO secara offline merupakan hasil akurasi tingkat keberhasilan deteksi dalam mendeteksi dropzone. Akurasi tingkat keberhasilan deteksi dihitung dari video yang di input pada keseluruhan frame yang terdapat pada video tersebut, kemudian dibagi oleh keberhasilan deteksi untuk mendapatkan akurasi tingkat keberhasilan deteksi. Proses perhitungan akurasi keberhasilan tingkat deteksi, bertujuan
User Komputer Program Load atau
Bobot Latih
Hasil Kamera
untuk mengetahui seberapa akurat dikedua metode dalam mendeteksi objek dropzone yang diteliti. Adapun rumus perhitungan akurasi tingkat keberhasilan deteksi, sebagai berikut:
𝐴𝑘𝑢𝑟𝑎𝑠𝑖 = ∑ 𝑏𝑒𝑛𝑎𝑟 𝑑𝑒𝑡𝑒𝑘𝑠𝑖
∑ 𝑓𝑟𝑎𝑚𝑒 𝑑𝑎𝑡𝑎 𝑥 100%
Berdasarkan dari keseluruhan pengujian dapat disimpulkan bahwa program metode YOLO ini sudah teruji dengan baik.
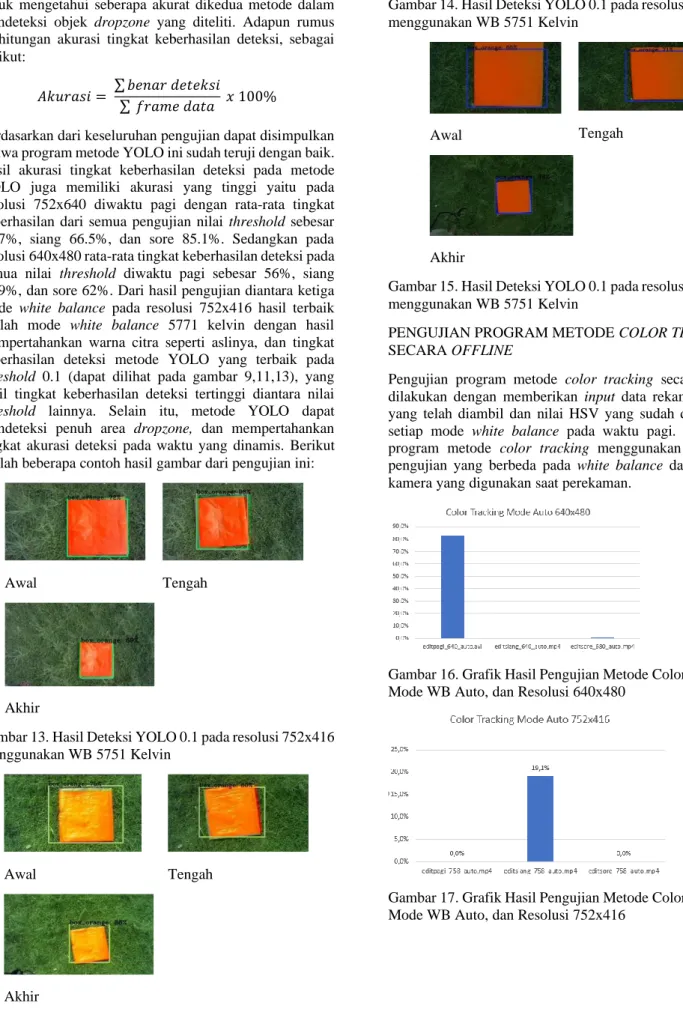
Hasil akurasi tingkat keberhasilan deteksi pada metode YOLO juga memiliki akurasi yang tinggi yaitu pada resolusi 752x640 diwaktu pagi dengan rata-rata tingkat keberhasilan dari semua pengujian nilai threshold sebesar 86.7%, siang 66.5%, dan sore 85.1%. Sedangkan pada resolusi 640x480 rata-rata tingkat keberhasilan deteksi pada semua nilai threshold diwaktu pagi sebesar 56%, siang 41,9%, dan sore 62%. Dari hasil pengujian diantara ketiga mode white balance pada resolusi 752x416 hasil terbaik adalah mode white balance 5771 kelvin dengan hasil mempertahankan warna citra seperti aslinya, dan tingkat keberhasilan deteksi metode YOLO yang terbaik pada threshold 0.1 (dapat dilihat pada gambar 9,11,13), yang hasil tingkat keberhasilan deteksi tertinggi diantara nilai threshold lainnya. Selain itu, metode YOLO dapat mendeteksi penuh area dropzone, dan mempertahankan tingkat akurasi deteksi pada waktu yang dinamis. Berikut adalah beberapa contoh hasil gambar dari pengujian ini:
Awal Tengah
Akhir
Gambar 13. Hasil Deteksi YOLO 0.1 pada resolusi 752x416 Menggunakan WB 5751 Kelvin
Awal Tengah
Akhir
Gambar 14. Hasil Deteksi YOLO 0.1 pada resolusi 752x416 menggunakan WB 5751 Kelvin
Awal Tengah
Akhir
Gambar 15. Hasil Deteksi YOLO 0.1 pada resolusi 752x416 menggunakan WB 5751 Kelvin
PENGUJIAN PROGRAM METODE COLOR TRACKING SECARA OFFLINE
Pengujian program metode color tracking secara offline dilakukan dengan memberikan input data rekaman video yang telah diambil dan nilai HSV yang sudah dikalibrasi setiap mode white balance pada waktu pagi. Pengujian program metode color tracking menggunakan beberapa pengujian yang berbeda pada white balance dan resolusi kamera yang digunakan saat perekaman.
Gambar 16. Grafik Hasil Pengujian Metode Color Tracking Mode WB Auto, dan Resolusi 640x480
Gambar 17. Grafik Hasil Pengujian Metode Color Tracking Mode WB Auto, dan Resolusi 752x416
Gambar 18. Grafik Hasil Pengujian Metode Color Tracking Mode WB 5751 Kelvin, dan Resolusi 640x480
Gambar 19. Grafik Hasil Pengujian Metode Color Tracking Mode WB 5751 Kelvin, dan Resolusi 752x416
Gambar 20. Grafik Hasil Pengujian Metode Color Tracking Mode WB 6000 Kelvin, dan Resolusi 640x480
Gambar 21. Grafik Hasil Pengujian Metode Color Tracking Mode WB 6000 Kelvin, dan Resolusi 752x416
Berdasarkan hasil grafik akurasi tingkat keberhasilan deteksi objek dropzone dari keseluruhan pengujian program metode color tracking dapat disimpulkan, bahwa program metode color tracking sudah teruji dan dapat mendeteksi objek dropzone, akan tetapi dari hasil pengujian metode color tracking belum dapat mendeteksi dengan waktu yang dinamis, ketika kalibrasi HSV hanya dilakukan sekali pada pagi hari. Hal ini dikarenakan cahaya matahari yang selalu berubah-ubah pada pagi, siang, maupun sore sangat
mempengaruhi nilai HSV objek yang dideteksi, sehingga hal ini membuktikan bahwa metode color tracking memerlukan kalibrasi ulang nilai HSV disetiap waktu. Hasil terbaik dari metode color tracking adalah pengujian data pagi, kemudian pada waktu siang tingkat deteksinya tinggi, akan tetapi hasil deteksi tersebut berupa deteksi lingkaran kecil yang mendominasi pada objek droopzone (dapat dilihat gambar 24) dan banyak terjadi deteksi pada sisi tepi objek dropzone, sedangkan pada waktu sore tingkat keberhasilan deteksi tidak dapat mendeteksi objek dropzone. Berikut beberapa contoh hasil metode color tracking disetiap waktunya:
Awal Tengah
Akhir
Gambar 22. Hasil Deteksi Color Tracking Pada Resolusi 752x416 Menggunakan WB 5751 Kelvin
Awal Tengah
Akhir
Gambar 23. Hasil Deteksi Color Tracking Pada Resolusi 752x416 Menggunakan WB 5751 Kelvin
Awal Tengah
Akhir
Gambar 24. Hasil Deteksi Color Tracking Pada Resolusi 752x416 Menggunakan WB 5751 Kelvin
Berdasarkan hasil rata-rata dari setiap pengujian program YOLO dan color tracking dalam mendeteksi objek dropzone pada waktu yang dinamis secara offline dengan menggunakan beberapa mode white balance, dan resolusi kamera, membuktikan bahwa pada metode YOLO dalam penelitian ini sudah bekerja sangat baik, dan dapat mempertahankan deteksi objek dropzone dengan waktu yang dinamis, sehingga ketika mencari titik tengah pada kotak deteksi akan selalu pada area dropzone. Sedangkan pada metode color tracking belum dapat mempertahankan deteksi pada waktu yang dinamis, dan hasil deteksi banyak terjadi deteksi lingkaran kecil, sehingga ketika mencari titik tengah pada lingkaran deteksi tidak selalu pada area dropzone.
Berikut adalah tabel hasil rata-rata keseluruhan pengujian tingkat keberhasilan deteksi disetiap waktu dengan kedua resolusi kamera pada metode YOLO dan metode color tracking:
Tabel 4. Rata-rata Keseluruhan Pengujian Tingkat Keberhasilan Deteksi Disetiap Waktu dengan Kedua Resolusi Pada Metode YOLO dan Metode Color Tracking
PENGUJIAN PROGRAM METODE YOLO SECARA REAL-TIME
Pengujian program pengolah data secara real-time dilakukan hanya pada metode YOLO. Fungsi dari pengujian ini adalah untuk mengetahui kemampuan sistem pendeteksi metode YOLO dalam mendeteksi objek dropzone secara langsung atau real-time pada waktu yang dinamis, dan dengan parameter ketinggian kamera yang berbeda, dengan tujuan untuk mengetahui keakuratan metode YOLO dalam mendeteksi objek dropzone.
Berdasarkan hasil pengaturan terbaik pada metode YOLO yang telah diuji pada data offline, akan dijadikan sebagai input pengaturan pada program ini, yaitu nilai threshold 0.1, white balance 5771 kelvin, dan resolusi kamera 752x416 yang diganti dengan resolusi 800x600, karena pada resolusi 752x416 tidak dapat dieksekusi pada program metode YOLO real-time. Berikut tabel hasil pengujian metode YOLO secara real-time pada waktu dinamis, dan dengan perbedaan ketinggian kamera dalam pengambilan data:
Gambar 25. Grafik Hasil Pengujian Metode YOLO secara Real-time
Berdasarkan keseluruhan pengujian pada metode YOLO secara real-time seperti pada gambar 26, bahwa program pengolah data metode YOLO secara real-time sudah bekerja dengan baik. Pengujian metode YOLO secara real- time dengan parameter tinggi yang berbeda memiliki hasil akurasi tingkat keberhasilan deteksi yang sangat baik disetiap waktu yaitu pada ketinggian ±150 pagi memiliki akurasi 79,5%, siang 80%, dan sore 65,6%. Sedangkan pada ketinggian ±180 pagi memiliki akurasi 79%, siang 86,7%, dan sore 79.3%. Hal ini membuktikan bahwa metode YOLO secara real-time dapat mempertahankan deteksi objek dropzone secara berkelanjutan pada waktu yang dinamis. Berikut beberapa hasil gambar pengujian metode YOLO secara real-time:
Awal Tengah
Akhir
Gambar 26. Hasil Deteksi Metode Yolo Pada Waktu Pagi dengan Ketinggian ±180cm
Awal Tengah
Waktu YOLO CT
640x481 752x416 640x481 752x416 Pagi 56,0% 86,7% 67,1% 63,4%
Siang 41,9% 66,5% 58,2% 67,5%
Sore 62,0% 85,1% 0,1% 0,0%
Total Keberhasilan Metode
53,3% 79,4% 41,8% 43,6%
Akhir
Gambar 27. Hasil Deteksi Metode Yolo Pada Waktu Siang dengan Ketinggian ±180cm
Awal Tengah
Akhir
Gambar 28. Hasil Deteksi Metode Yolo Pada Waktu Sore dengan Ketinggian ±180cm
KESIMPULAN DAN SARAN
Dalam penelitian ini merancang metode pendeteksi objek dengan metode YOLO (yang diteliti) dan membandingkan
dengan metode sebelumnya yang telah digunakan pada robot Al-Mubarok_MK4 yaitu Color Tracking. Tujuan penelitian ini untuk mendapatkan metode yang dapat mempertahankan tingkat akurasi keberhasilan deteksi dropzone pada waktu dinamis (pagi, siang, dan sore). Hasil pengujian menunjukan bahwa metode YOLO dapat mempertahankan tingkat akurasi keberhasilan deteksi dropzone pada waktu yang dinamis dengan sangat baik.
Sedangkan pada metode color tracking tidak dapat mempertahankan pada waktu yang dinamis, akan tetapi hanya memiliki tingkat keberhasilan deteksi yang tinggi pada waktu pagi saja.
REFERENSI
Jamtsho, Yonten, Panomkhawn Riyamongkol, and Rattapoom Waranusast. 2019. “Real-Time Bhutanese License Plate Localization Using YOLO.” ICT Express (xxxx):1–4. doi: 10.1016/j.icte.2019.11.001.
Lu, Shengyu, Beizhan Wang, Hongji Wang, L. Chen, Ma Linjian, and Xiaoyan Zhang. 2019. “A Real-Time Object Detection Algorithm for Video.” Computers and Electrical
Engineering 77:398–408. doi:
10.1016/j.compeleceng.2019.05.009.
Shi, Rui, Tianxing Li, and Yasushi Yamaguchi. 2020. “An Attribution-Based Pruning Method for Real-Time Mango Detection with YOLO Network.” Computers and Electronics in Agriculture 169(July 2019):105214. doi:
10.1016/j.compag.2020.105214.
Shinde, Shubham, Ashwin Kothari, and Vikram Gupta.
2019. “ScienceDirect YOLO Based Human Action Recognition and Localization.” Procedia Computer Science 133(2018):831–38. doi: 10.1016/j.procs.2018.07.112.