LAPORAN KEMAJUAN
PENELITIAN UNGGULAN TERAPAN
DANA ITS 2020
PENGEMBANGAN SISTEM MEKATRONIKA DAN INTERFACE
CERDAS PADA PLATFORM KAPAL (BOAT) AUTONOMOUS ITS
Tim Peneliti :
Hendro Nurhadi, Dipl.-Ing., Ph.D (Teknik Mesin Industri/Fakultas Vokasi)
Fadlilatul Taufany, ST., Ph.D (Teknik Kimia/Fakultas Teknologi Industri dan Rekayasa Sistem)
Muhammad Lukman Hakim, ST., MT (Teknik Mesin Industri/Fakultas Vokasi)
Dr. Irhamah, S.Si., M.Si (Statistika/Fakultas Sains dan Analitika Data)
DIREKTORAT RISET DAN PENGABDIAN KEPADA MASYARAKAT
INSTITUT TEKNOLOGI SEPULUH NOPEMBER
Daftar Isi
Daftar Isi ... i
Daftar Tabel ... ii
Daftar Gambar ... iii
Daftar Lampiran ... iv
BAB I RINGKASAN ... 1
BAB II HASIL PENELITIAN ... 2
BAB III STATUS LUARAN ... 7
BAB IV PERAN MITRA (UntukPenelitian Kerjasama Antar Perguruan Tinggi) ... 11
BAB V KENDALA PELAKSANAAN PENELITIAN ... 12
BAB VI RENCANA TAHAPAN SELANJUTNYA ... 13
BAB VII DAFTAR PUSTAKA ... 14
BAB VIII LAMPIRAN ... 15
BAB I RINGKASAN
Kapal adalah kendaraan pengangkut penumpang dan barang di laut, sungai seperti halnya sampan atau perahu yang lebih kecil. Kapal biasanya cukup besar untuk membawa perahu kecil seperti sekoci. Sedangkan dalam istilah Inggris, dipisahkan antara ship yang lebih besar dan boat yang lebih kecil. Pada setiap kapal besar yang berawak dan berpenumpang untuk kapal penumpang 35-100 diharuskan memiliki 1 rescue boat umtuk wilayah pelayaran di sekat pesisir dan pelayaran internasional, dengan adanya peraturan yang diatur pada SOLAS Chapter 3 Reg. 21 dan instruksi dari Menteri Perhubungan Republik Indonesia nomor IM 10 th. 2018. Sistem autonomous merupakan perwujudan dari konsep ilmu yang mengarah pada perkembanganteknologi saat ini. Secara umum autonomous adalah sebuah proses dimana sebuah benda dapat di operasikan menggunakan suatu perangkat elektronik yang dijalankan secara otomatis dengan menggunakan suatu alat penggerak (Remote Control) dari jarak jauh. Sebuah kapal tanpa awak (Autonomous Boat) itu sendiri merupakan suatu kapal yang mampu dikendalikan dengan menggunakan remote control yang sudah di program untuk mengoprasikan boat dari jarak jauh tanpa adanya awak diatas boat tersebut. Mikrokontroler STM 34 F4 Discovery digunakan sebagai pengontrol atau pembaca pergerakan pada sistem steering dang throttling pada kapal ini. Mikrokontroller akan mengontrol perubahan pergerakan sistem steering dan throttling dengan menggunakan potensiometer sebagai feedback controller.
Tujuan yang diharapkan penciptaan kapal ini adalah untuk membuat suatu kapal penyelamat yang berbasis autonomus sehingga pada saat melakukan misi penyelamatan di laut lepas tidak lagi menggunakan operator, sehingga pada saat terjadi kecelakaan/ insiden di laut lepas, kapal ini bisa berangkat tanpa awak dengan data lokasi terjadinya kecelakaan. Dengan adanya perkembangan teknologi saat ini banyak metode pekerjaan yang bisa dilakukan. Pertama, dengan cara interface ship autonomus, yaitu survey langsung ke galangan pembuat kapal penyelamat ini, dengan cara mengidentifikasi peralatan yang ada, mengetahui stabilitas kapal, dan mengetaui permasalahan apa yang biasa terjadi pada kapal penyelamat ini. Kedua, mendesain sistem yang harus ada dan digunakan dalam kapal meliputi peralatan penggerak dan peralatan manuver, kemudian mendesain sistem kelistrikan yang sesuai dengan spesifikasi peralatan yang terpasang. Ketiga, melakukan uji coba langsung di lapangan untuk mengetahui respon dari sistem yang telah dipasang. Setelah itu semua sistem yang ada bisa di finalisasi dan bisa digunakan sesuai tujuan.
Ringkasan penelitian berisi latar belakang penelitian,tujuan dan tahapan metode penelitian, luaran yang ditargetkan, kata kun
BAB II HASIL PENELITIAN
2.1 Sistem pada iBoat
2.1.1 Steering Sistem
Kemudi kapal adalah suatu alat yang digunakan untuk mengubah dan menentukan arah gerak kapal, baik arah lurus maupun arah kapal belok, Kemudi kapal ditempatkan diujung belakang lambung kapal . Prinsip kerja kemudi kapal yaitu dengan mengubah arah arus cairan yang mengakibatkan perubahan arah kapal. Cara kerja kemudi kapal yaitu kemudi digerakkan secara mekanis atau hidrolik dari anjungan dengan menggerakkan roda kemudi. (SPM, 2013)
Sistem pertama yang dipasang pada iBoat ini adalah steering, yaitu sistem yang digunakan untuk manuver kapal. Pada sistem steering ini menggunakan EHPS (Electric Hydraulic Power Steering), dalam sistem ini bisa dilihat bahwa untuk membuat kapal melakukan manuver tentunya harus menekan aktuator dengan displacement yang dibutuhkan. Pompa Hidrolik electric ini mempunyai fungsi untuk memindahkan fluida dengan tekanan tertentu untu bisa masuk mengisi tabung dari aktuator, sehingga bisa mendapatkan gaya untuk memindahkan posisi mesin yang secara otomatis membuat kapal bermanuver.
2.1.2 Sistem Throttling
Throttle merupakan bagian dari sistem yang mengontrol banyaknya jumlah asupan udara yang masuk ke dalam mesin. Tenaga mesin dapat ditingkatkan atau diturunkan dengan pembatasan gas masuk pada sistem throttle. Sistem throttle juga mengatur laju dari boat, dimana pada saat kopling pada posisi netral lalu didorong kedepan maka boat akan melaju kedepan dan semakin kopling didorong kedepan maka laju kapal akan semakin cepat. Jika kopling ditarik kebelakang maka boat akan berjalan mundur. Pada sistem throttle autonomous boat ini, digunakan motor yang di couple dengan throttle dengan tujuan motor tersebut berfungsi sebagai penggerak throttle saat boat digerakkan menggunakan sistem otomatis yang dikendalikan jarak jauh oleh remote control. Sistem throttle pada boat terletrak pada bagian depan bersebalahan dengan kemudi atau steering.
2.2 Pemodelan iBoat
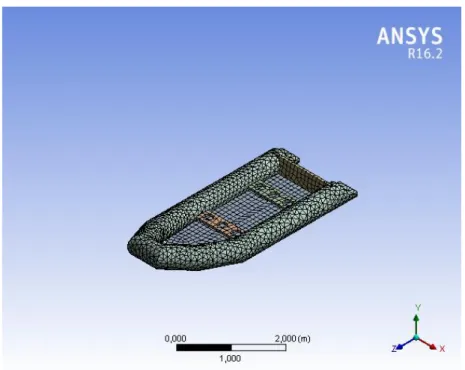
Sebelum melakuka pemodelan, terlebih dahulu kapal di desain menggunakan software Comptuer Aided Drawing (CAD) yaitu solidwork, dengan acuan pengukuran langsung pada kapal yang telah disediakan oleh pihak industri, selanjutnya model tersebut bisa disimulasikan menggunakan software computer aided engineering (CAE) yaitu ansys workbench, cakupan mengenai analisa pemodelan yang dilakukan untuk melihat pengaruh dari tekanan hidrostatis dan gaya gaya yang bekerja di atas kapal. Material
yang digunakan untuk membuat iBoat adalah Alumunium 5083, berikut adalah sifat mekanik dari aluminium 5083
Pada tabel sifat mekanik Alumunium 5083, diketahui Ultimate Tensile Strength sebesar 290 MPa. Pada analisa FEM, meshing menggunakan metode tetrahedron element. Proses meshing beserta model 3D dari chassis iBoat autonomus ditunjukkan pada gambar 4
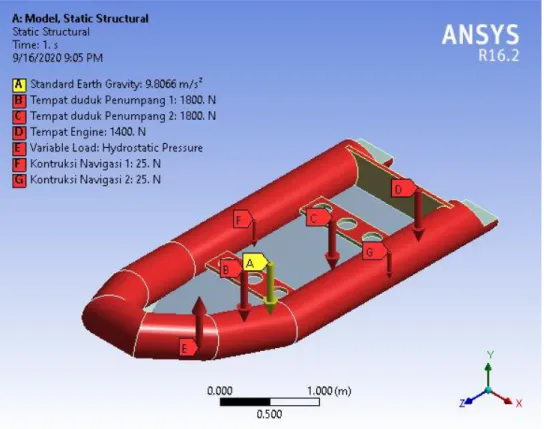
Setelah proses Meshing, selanjutnya dilakakukan analisa pembebanan pada kapal, hal ini dapat dilihat dari banyaknya komponen yang menumpu pada kapal, oleh karena itu perlunya memasukkan semua data komponen, mulai dari dimensi, berat, dan letaknya. Setelah mengetahui data tersebut, selanjutnya meletakkan beban vertikal ke body kapal.
Gambar 3 Sifat Mekanik Alumunium 5083
Gambar 5 Kondisi Pembebanan pada body Iboat
Hasil solution dari simulasi dapat terlihat setelah proses solving software Ansys 16.2 selesai yang ditunjukkan pada Gambar 6
(b)
(c)
Gambar 6 Hasil simulasi dari (a) Directional Deformation, (b) Deformation Total, dan (c) Equivalent (von Mises ) Strees
Hasil :
1. Lendutan (deformation total, δmaks) Defleksi maksimum struktur iBoat terjadi pada ujung depan kapal dengan nilai sebesar δmaks = 290,31 mm yang ditunjukkan pada Gambar 6(a) 2. Tegangan luluh (equivalent Von-Mises stress, σy maks) Tegangan luluh maksimal struktur iBoat
terjadi pada pengelasan penyangga tempat mesin (buritan kapal) dengan nilai sebesar σy maks = 2,085 Pa yang ditunjukkan pada Gambar 6(c).
2.3 Estimasi
lintasan unmanned surface vehicle (usv) menggunakan metode ensemble
kalman filter dan unscented kalman filter
Unmanned Surface Vehicle merupakan kendaraan kapal yang dapat bergerak
dipermukaan air tanpa awak. USV dikendalikan otomatis dengan memberikan
perintah-perintah seperti waypoint, melalui Ground Control Surface (GCS). Pada studi gerakan
benda apung dilaut terdapat 6 DOF untuk mendefinisikan dan mengorientasikan dari
badan benda apung tersebut. Enam DOF yang dimaksud adalah surge, sway, heave, roll,
pitch, yaw. Tiga kordinat yang pertama (surge, sway dan heave) menunjukkan posisi
dan gerak translasi pada sumbu x,y, dan z. Sedangkan untuk kordinat yang lainnya (roll,
pitch dan yaw) digunakan untuk menunjukkan gerakan orientasi dan rotasi. Model gerak
UAV 6 DOF sebagai berikut :
Pada penelitian ini, kendaraan kapal yang digunakan merupakan kapal Boat dengan
berat 400 kg dengan inisialisasi kecepatan 6 knot (3,09 m/s). sehingga menggunakan
model gerak UAV 3DOF yaitu gerak surge, sway dan yaw (X,Y,Z). Selanjutnya
disimulasikan dengan menggunakan Program Matlab. Dengan mengambil langkah
waktu 600 langkah. Hasil yang didapat sebagai berikut :
Gambar 7 Estimasi Sumbu X
Gambar 7. Menunjukkan bahwa boat bergerak dari posisi 𝑥 = 0 sampai 𝑥 = 23. Hal tersebut menunjukkan bahwa boat bergerak sejauh 23 meter pada sumbu 𝑥. Sehingga dengan kecepatan boat sebesar 6 knot mengakibatkan boat bergerak sejauh 23 meter dalam waktu 60 detik/1 menit.
Gambar 8 Estimasi Sumbu Y
Gambar 8. Menunjukkan bahwa boat bergerak dari posisi 𝑦 = 0 sampai 𝑦 = 3 . Hal tersebut menunjukkan bahwa boat bergerak sejauh 3 meter pada sumbu 𝑦. Hal ini dikarenakan banyak faktor yang mempengaruhi gerak kapal seperti gelombang air laut dan kondisi lingkungan lainnya.
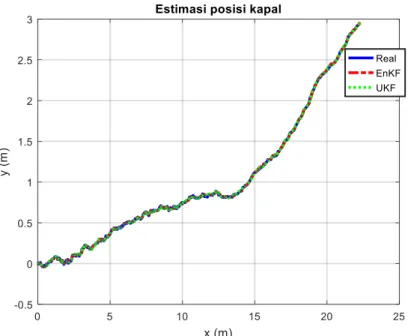
Gambar 9 Estimasi Posisi Boat
Gambar 9. menunjukkan bahwa boat bergerak dengan lintasan tersebut dengan kecepatan 6 knot boat dapat bergerak sejauh 23 meter dengan jarak sumbu-y sebesar 3 meter dalam waktu 1 menit (60 detik). Sehingga USV bisa bergerak dari titik satu ke titik yang lainnya dengan estimasi lintasan tersebut dan dengan menggunakan 2 metode estimasi error yang didapat tidaklah jauh.
BAB III STATUS LUARAN
Status Luaran berisi status tercapainya luaran wajib yang dijanjikan dan luaran tambahan (jika ada). Uraian status luaran harus didukung dengan bukti kemajuan ketercapaian luaran di bagian bab Lampiran
BAB IV PERAN MITRA
BAB V KENDALA PELAKSANAAN PENELITIAN
Kendala pelaksanaan penelitian ini terdapat pada pembelian material dan sumber daya manusia yang terbatas sehingga memebutuhkan waktu yang lebih lama untuk pengerjaannya
BAB VI RENCANA TAHAPAN SELANJUTNYA
Rencana Tahapan Selanjutnya berisi tentang rencana penyelesaian penelitian dan rencana untuk mencapai luaran yang dijanjikan.
BAB VII DAFTAR PUSTAKA
Daftar Pustaka disusun dan ditulis berdasarkan sistem nomor sesuai dengan urutan
pengutipan. Hanya pustaka yang disitasi pada laporan kemajuan yang dicantumkan dalam
Daftar Pustaka.
BAB VIII LAMPIRAN
Lampiran berisi tabel daftar luaran (Format sesuai lampiran 1) dan bukti pendukung luaran wajib dan luaran tambahan (jika ada) sesuai dengan target capaian yang dijanjikan