2. TINJAUAN PUSTAKA
Bab ini memaparkan dasar teori yang relevan dengan objek penelitian ini dan hasil peneltian sebelumnya yang pernah dilakukan oleh peneliti lain.
2.1. Komponen utama dalam siklus armada
Silklus armada (vehicle cycle) mempunyai tiga komponen utama, yaitu : siklus operasi (operating cycle), siklus pelayanan (service cycle), dan siklus tahunan (annual cycle) (Manheim, 1979).
Siklus operasi dimulai dan berakhir pada suatu tempat basis operasi (operational base), suatu terminal permanaen atau sementara dimana armada diistirahatkan jika tidak sedang dalam pelayanan. Silklus armada ini meliputi waktu perjalanan baik ketika sedang kosong ataupun isi, waktu loading dan unloading, waktu penempatan (positioning time), waktu operasi pelayanan(operationing sevices time), waktu proses (processing time), dan penundaan jadwal (schedulle slack). Tempat basis operasi operasi ini lebih dikenal sebagai terminal tempat mulai dan berakhirnya pelayanan.
Siklus pelayanan dimulai dan berakhir pada suatu tempat basis perawatan utama (major maintenance base), dimana armada digarasikan dan dilakukan pemeliharaan. Setiap siklus pelayanan tersusun atas satu atau lebih siklus operasi. Tempat basis perawatan utama (major maintenance base) merupakan tempat dimana armada dilakukan perawatan, dan armada digarasikan ketika tidak sedang operasi. Tempat basis perawatan utama ini kadang-kadang disebut dengan “pool’ atau “garasi”.
Siklus tahunan terdiri dari total trayektori dari armada dalam satu tahun. Siklus tahunan ini meliputi siklus pelayanan, ditambah waktu yang dibutuhkan untuk pemeliharaan, dan ditambah waktu idle.
Gambar 2-1 :
Siklus armada – Variabel dan hubungannya Siklus tahunan dalam pelayanan ts t Perawatan MNT t idle idle t Siklus Operasi ) (i tVC Siklus Operasi ) (i tVC Siklus Operasi ) (i tVC Posisioning PS t Siklus pelayanan Siklus operasi Posisioning PC t In motion MVE t Schedule Slack SLK t Travel T t Terminal STA t Movement Processing MP t Travel, Loaded TL t Travel, Unloaded TUL t Load/unload LULD t Operational Servicing, tOS Processing Loaded, tMPL Processing unLoaded, t Cruise, tCR Decceleration/, cceleration, tACD Delay, tD Cruise, tCR Decceleration/, cceleration, tACD Delay, tD
2.2. Hubungan variabel waktu dalam siklus operasi Dalam siklus operasi dapat diidentifikasi menjadi :
Waktu posisioning (positioning time, tP), adalah waktu yang dibutuhkan untuk bergerak dari tempat basis perawatan utama (major maintenance base) ke tempat basis operasi pada dimulainya pelayanan dan/atau waktu yang dibutuhkan untuk bergerak dari tempat basis operasi ke terminal/shelter pertama pada rute dan dari tempat terminal/shelter terakhir kembali ke tempat basis perawatan utama (major maintenance Base). Kadang-kadang perlu dibedakan antara tPC , waktu posisioning dalam siklus operasi, tPS, waktu posisioning dalam siklus pelayanan. Waktu perjalanan pada saat mengangkut (Travel time while loaded, tTL), adalah waktu yang dibutuhkan untuk suatu perjalanan produktif. Sebagaimana ditunjukkan dalam gambar 2-1 waktu perjalanan ini terdiri dari waktu akselerasi/deselerasi, dan delay yang disebabkan oleh kemacetan.
Waktu perjalanan pada saat tidak mengangkut (Travel time while unloaded, tTUL), adalah waktu yang dibutuhkan untuk bergerak untuk suatu perjalanan tidak produktif (dari suatu titik dimana muatan dikosongkan, dan bergerak menuju titik baru dimana suatu pemuatan baru dilakukan). Dalam siklus operasi angkutan kota yang berdasarkan rute, waktu perjalanan tidak produktif ini tidak ada.
Waktu naik/turun (load/unload time, tLULD) adalah waktu yang dibutuhkan oleh penumpang untuk naik/turun.
Waktu operasional pelayanan (operational servicing time, tOS adalah waktu yang dibutuhkan untuk pengisian BBM, pembersihan, perawatan, suplai replenishment, pergantian kru, dan lain-lain.
Waktu henti di terminal (station stop time, tSTA) adalah waktu armada berhenti di terminal untuk digunakan kegiatan-kegiatan operasional pelayanan seperti pembersihan dan lain-lain, dan kegiatan penumpang naik dan turun.
Waktu kemunduran jadwal (schedulle slack, tSLK) untuk operasi yang mengikuti jaadwal (timetable), adalah waktu idle yang dibutuhkan ketika armada dalam operasi untuk menjaga ketepatan jadwal.
Movement processing time tMP, adalah bergerak antara dua titik untuk prosesing. Waktu total siklus operasi armada (total vehicle operating-cycle time, tVC) adalah jumlah dari semua komponen :
MP SLK TUL TL PC VC t t t t t t ... (2-1)
2.3. Hubungan variabel waktu dalam siklus pelayanan
Dalam suatu periode dimana arama keluar dari basis perawatan utama (major maintenance base) sampai armada kembali, armada melakukan sejumlah n C siklus operasi. Waktu total yang dibutuhkan dari semua siklus operasi itu, dan dengan waktu yang dibutuhkan untuk penempatan armada ke dan dari tempat basis perawatan utama (major maintenance base) adalah waktu dalam pelayanan (in-time services time, t : IS
nC i VC PS IS t t i t 1 ) ( ... (2-2)Jika t adalah rata-rata waktu siklus operasi armada, yaitu V
nC i VC C V t i n t 1 ) ( 1 ... (2-3) Maka V C PS IS t n t t ... (2-4)2.4. Hubungan variabel waktu dalam siklus tahunan
Dalam satu tahun armada membutuhkan waktu untuk perawatan (maintenance time, tMNT). Waktu perawatan ini berisi jadwal perawatan yang mensyaratkan
setiap x kilometer tertentu harus dilakukan perawatan. Hubungan antara variabel waktu dalam satu tahun adalah :
365tIS tMNT tIDLE ... (2-5) 2.5. Diagram jejak
Hubungan antara posisi armada (jarak) dan waktu dapat digambarkan dalam diagram jejak (trajectory diagram) . Sebuah contoh digram jejak yang terdiri 5 (lima) kendaraan pada ruas jalan tertentu (Ofyar, 2003) yang diberikan dalam diagram jejak memberikan penjelasan bagaimana hubungan ruang dan waktu dari setiap armada.
Gambar 2-2 :
Posisi 5 (lima) buah kendaraan dalam diagram waktu dan ruang
Seperti terlihat pada gambar 2-2 kita dapat mengetahui posisi setiap kendaraan pada ruas jalan tersebut. Dengan memanfaatkan digram jejak tersebut sangat banyak informasi bisa didapat dan dianalisis. Informasi itu antara lain :
a. Informasi kecepatan sesaat (spot speed)pada setiap waktu dan posisi tertentu.
c. Informasi waktu antara (time head way) antar kendaraan
d. Posisi dan waktu dimana kendaraan menyalip kendaran didepannya e. Posisi dan waktu dimana kendaraan tidak bergerak
f. Kecepatan saat bergerak setiap kendaraan (running speed) g. Kecepatan perjalanan untuk setiap kendaraan (journey speed)
2.6. Waktu siklus armada (cycle time)
Waktu siklus adalah total waktu satu perjalanan dari terminal asal sampai terminal tujuan dan kembali ke terminal asal dimana sudah termasuk waktunyang dibutuhkan untuk menaikkan dan menurunkan penumpang serta waktun transisi di Terminal (lay over time). Waktu siklus jiga merupakan fungsi dari kecepatan rata kendaraan, seperti :
a. Jarak pemberhentian bis b. Jumlah penumpang per trip
c. Waktu naik/turn rata per penumpang d. Keadaan jalan
e. Perilaku pengemudi f. Kemacetan lalulintas g. Dan lain-lain
Untuk menghitung waktu siklus kendaraan dinyatakan dengan model sebagai berikut. :
i i TT A B LOT CT 1 / ... (2-6) Dimana :CT adalah waktu siklus 1
LOT adalah Lay over time pada terminal Jombor A
B/ adalah waktu naik/.turun penumpang
2.7. Jumlah armada
Jumlah armada alokasi (AA ) meliputi armada yang aktif beroperasi (AO) serta armada cadangan yang tidak beroperasi. Jumlah armada terkait erat dengan perkiraan kebutuhan permintaannya, jenis, kapasitas, dan ukurannya. Jumlah armada sebisa mungkin sama sesuai dengan jumlah kebutuhannya.
Dalam menghitung armada alokasi digunakan rumus ) 1 .( RF AO AA ... (2-7) Dimana :
AA adalah armada alokasi AO adalah armada operasi RF adalah reserved factor (%)
2.8. Headway
Headway merupakan interval keberangkatan antara satu armada dengan armada berikutnya, diukur dalam satuan waktu pada titik tertentu untuk setiap rutenya. Headway merupakan salah satu aspek yang mempengaruhi tingkat pelayanan angkutan umum. Kebijakan yang menyangkut pengaturan headway berimplikasi pada kemungkinan tingkat pengisian muatan.
Perhitungan headwayn dapat dirumuskan sebagai berikut
AO CT
h ... (2-8) Dimana :
h adalah headway (menit) CT adalah waktu siklus (menit)
AO adalah armada operasi
2.9. Waktu tunggu
Waktu tunggu adalah selama menunggu penumpang menunggu armada di shelter atau terminal sampai bis tersebut berangkat. Peacnold, Wilson, dan Kullman dalam Manheim (1979) rumus empiris untuk operasi bus perkotaan :
3 , 18 2 , 0 5 , 5 3 , 18 0 2 / h untuk h h untuk h time waiting ... (2-9)
Dimana h adalah headway (menit). Batas 18 menit mengindikasikan ,3 kecenderungan pelaku perjalanan mengetahui jadwal kedatangan pada sistem dengan headway yang panjang.
Waiting time dapat juga dihitung dengan simulasi dimana proses kedatangan penumpang ditirukan melalui program simulasi komputer.
2.10. Metode penentuan nilai waktu (Value of Time)
Nilai waktu perjalanan merupakan satu komponen yang penting dalam analisis transportasi, terutama dalam aspek ekonomi nilai waktu perjalanan berkaitan dengan adanya oppotunity cost dari setiap waktu yang dihabiskan dalam menempuh perjalanan maupun dengan jumlah uang yang dikorbankan dalam melakukan perjalanan. Nilai waktu perjalanan adalah suatu faktor konversi dalam melakukan penghematan waktu dalam bentuk uang.
Salah satu metode penentuan nilai waktu yang dapat digunakan adalah metode pendapatan, (Income approach). Metode ini tergolong sederhana, karena hanya menggunakan dua faktor yaitu pendapatan domestik regional bruto (PDRB) per orang dan jumlah waktu kerja dalam setahun dengan mengasumsikan bahwa waktu yang digunakan mengahasilkan suatu produk dalam bentuk pendapatan seseorang. (The Value of Travel Time; theory and Measurement, Bruzelius, Nils, 1979 dalam Prihanstanto, 2007). orang tahunan keja Waktu orang PDRB VOT / / ... (2-10) Dimana :
,VOT = Nilai waktu perjalanan1
PDRB = Pendapatan domestik regional bruto
1
Dalam teks literatur simbol digunakan untuk notasi nilai waktu, sedangkan dalam literatur yang lain simbol digunakan pula untuk notasi rata-rata kedatangan. Supaya tidak menimbulkan kerancuan, untuk selanjutnya dalam tesis ini simbol tetap digunakan sebagai notasi untuk rata-rata kedatangan, sedangkan notasi untuk nilai waktu diganti dengan notasi VOT .
Metode ini pengumpulan datanya relatif mudah. Pendekatan ini menghasilkan menghasilkan nilai waktu rata-rata dalam daerah studi.
Dalam metode ini, pengumpulan data dibagi menjadi data primer dan data sekunder. Data primer dapat dikerjakan dengan wawancara kepada penumpang bus dengan memberikan pertanyaan-pertanyaan seperti pendapatan, jumlah jam kerja, dan lainnsebagainya. Data sekunder dapat diperoleh dari instansi terkait seperti Badan Pusat Statistik (BPS). Data yang digunsksn adalah produk domestik regional bruto, jumlah penduduk (umur, angkatan kerja) dan lain sebagainya. 2.11. Proses poisson
Proses kedatangan penumpang dapat didekati dengan proses poisson. Persyaratan suatu proses kedatangan dapat didekati dengan proses poisson adalah proses stokastik }{N(t),t0 yang memiliki karakteristik sebagai berikut :
1. Jumlah kedatangan pada waktu tertentu adalah satu.
2. N(ts)N(t) (jumlah kedatangan dalam waktu interval (t,t adalah s) independen pada {N(u),0ut}
3. Distribusi dari N(ts)N(t) adalah independen terhadap t untuk semuat,s0
Jika }{N(t),t0 adalah proses poisson , maka jumlah kedatangan dalam setiap interval waktu s adalah variabel random poisson dengan parameter , dimana s dalam adalah bilangan real positif (Law and Kelton, 2000, hal. 389-390). Oleh karena itu E[N(s)]s dan secara khusus, E[N(1)]. Dengan demikian, adalah jumlah kedatangan yang diharapkan dalam setiap interval waktu yang panjang intervalnya sama dengan 1. Kita katakan adalah rata-rata kedatangan dari proses tersebut.
0 , dan . . . , 2 , 1 , 0 untuk ! ] ) ( ) ( [ k t s k s e k t N s t N P k s ... (2-11) Kita dapat melihat bahwa waktu antar kedatangan untuk suatu proses poisson adalah variabel random IID eksponensial. Jika {N(t),t 0}adalah proses poisson dengan rata-rata , maka hubungannya dengan waktu antar kedatangan,. . . , 2 , 1 A
A adalah variabel random IID (Independent and Identically Distributed) eksponensial dengan rata-rata adalah 1/.
2.12. Proses poisson nonstasioner
Proses stokastik {N(t),t 0} dikatakan sebagai proses poisson nonstasioner (nonstationary poisson process) jika
1. Satu kedatangan pada setiap suatu waktu
2. N(ts)N(t) adalah independent pada {N(u),0ut}
Dengan demikian, untuk proses poisson nonstasioner, kedatangan masih harus satu kedatangan pada setiap waktu tertentu. dan jumlah kedatangan dalam suatu interval tertentu adalah independent. Tetapi sekarang rata-rata kedatangan (rate)
) (t
diperbolehkan sebagai fungsi waktu.
Ambil (t)E[N(t)] untuk semua t 0 adalah dapat didiferesialkan untuk suatu nilai tertentu t. Kita definisikan (t) sebagai
) ( ) ( t dt d t ... (2-12)
Secara intuisi, (t) akan menjadi besar dalam interval yang jumlah kedatangan yang diharapkan (expected number of arrival) adalah besar. Kita sebut saja (t) dan )(t berturut-turut adalah fungsi ekspektasi (expectation function) dan fungsi rata-rata kedatangan (rate function), untuk prosen poisson nonstasioner.
Teorema berikut ini menunjukkan bahwa jumlah kedatangan dalam interval ]
,
[t t untuk proses poisson nonstsioner adalah suatu veriabel random poisson s yang mempunyai parameter tergantung pada t dan s.
Teorema : Jika {N(t),t0}adalah proses poisson non stasioner dengan fungsi ekspetasi kontinyu (t), maka
0 , dan . . , 2 , 1 , 0 untuk ! ] , ( [ ] ) ( ) ( [ ) , ( k t s k s t b e k t N s t N P k s t b (2-13)
Dimana
ts t y dy t s t s tb( , ) ( ) ( ) ( ) . (Law and Kelton, 2000, hal. 390-391).
2.13. Pembangkitan variabel random
Salah komponen penting dalam simulasi komputer yang melibatkan variabel-variabel stokastik adalah pembangkitan variabel-variabel random. Beberapa distribusi yang sering muncul dalam kejadian stokastik dapat dikelompokkan dalam variabel random kontinyu dan diskrit. Variabel random kontinyu sering muncul dalam bentuk distribusi uniform, eksponensial, m-erlang, gamma, weibul, normal, lognormal, beta, pearson tipe P, pearson tiper VI, triangular dan empirikal distribusi.
2.13.1. Distribusi uniform
Fungsi distribusi dari suatu variabel random U(a,b) dengan mudah dapat dibalikkan dengan pemecahan uF(x) untuk nilai x yang akan ditentukan, untuk 0 u1, u a b a u F x 1( ) ( ) ... (2-14)
Demikian, kita dapat menggunakan metode inverse-transform untuk membangkitkan variabel random X dengan algoritma sebagai berikut:
1. Bangkitkan U ~U(0,1) 2. Hitung nilai X a(ba)U 2.13.2. Distribusi eksponensial
Pembangkitan variabel random dari suatu distribusi eksponensial dengan mean
lainnya x e x f x 0 0 , 1 ) ( / ... (2-15)
Fungsi kumulatiif distribusi F(x) :
lainnya x e x F x 0 0 , 1 ) ( / ... ( 2-16)
Inverse-transform dari fungsi kumulatif distribusi eksponensial di atas adalah :
) 1
ln( U
X ... ( 2-17) Algoritma untuk membangkitkan variabel random distribusi eksponensial adalah sebagai berikut :
1. Bangkitkan U ~U(0,1) 2. Hitung nilai X lnU
2.13.3. Pembangkitan variabel random waktu antar kedatangan
Proses Poison dengan rata-rata kedatangan bersifat bahwa waktu antar kedatangan (interarrival times) (Ai titi1), dimana (i=1,2…) adalah variabel random exponensial IID dengan mean 1/. Dengan demikian kita dapat membangkitan nilai ti secara rekursi sebagai berikut (Law & Kelton):
1. Bangkitkan U ~ U(0,1) 2. Hasilkan ti ti1(1/)lnU
Algoritma ini dapat dengan mudah dimodifikasi untuk membangkitkan beberapa proses kedatangan dimana waktu antar kedatangan adalah variabel random IID, meskipun waktu antar kedatangannya bukan eksponensial.
Algoritma di atas proses poisson di atas adalah merupakan algoritma untuk proses poisson stasioner (stationary poisson processes) dimana rata-rata kedatangan (rate, ) konstan pada semua interval waktu. Sering kali pada proses kedatangan sesungguhnya, rata-rata kedatangan bervariasi pada untuk dari interval waktu satu
ke interval waktu lainnya. Proses kedatangan yang demikian disebut nonstationary poisson proseses.
Beberapa algoritma telah dikembangkan untuk menghasilkan variabel random waktu antar kedatangan yang merepresentasikan suatu proses poisson non stasioner (nonstationary poisson proseses ). Salah satu algoritma yang dikembangkan untuk menghasilkan variabel random waktu kedatangan untuk proses poisson non stasioner adalah metode tranformasi invers (invers-transform method) (Cinlair, 1975 dalam Law and Kelton, 2000).
Gambar 2-3 :
Pembangkitan suatu nonstationary poisson process dengan invers fungsi ekspektasi (expectation function)
Sesuai dengan persamaan (2-12) :
t dy y t 0 ( ) ) ( ... ( 2-18) Fungsi ekspektasi ini akan selalu kontinyu sepanjang t . Karena fungsi ekspetasi ini merupakan integral tidak tertentu, (t) adalah jumlah kedatangan yang diharapkan antara 0dan t . Kemudian proses poisson non stasioner dengan ekspektasi dapat dibangkitan dengan pertama-tama dengan membangkitkan waktu kedatangan poisson {t'i} untuk rata-rata kedatangan 1. Dan denganmengambil ti 1(t'i)
, dimana adalah invers dari fungsi ekspetasi . 1 Algoritma untuk proses poisson non stasioner adalah :
1. Bangkitkan U ~U(0,1) 2. Set t'it'i1lnU 3. Hitung ti 1(t'i)
2.14. Penentuan bentuk distribusi teoritis pada data
Penentuan bentuk distribusi teoritis pada data secara esensial adalah suatu usaha untuk mengidentifikasi distribusi yang mendasari dari data yang dibangkitkan. Penentuan distribusi terbaik yang pas pada data dapat memiliki kompleksitas yang cukup tinggi dan bukan merupakan ilmu eksak. Penentuan distribusi secara merupakan proses trial and error . Prosedur dasar untuk menentukan terdiri dari tiga tahapan.: (1) Satu atau lebih distribusi dipilih sebagai distribusi kandidat ; (2) estimasi parameter untuk setiap distribusi ; (3) Goodness of fit dilakuikan untuk mengetahui dengan pasti seberapa bagus distribusi sesuai dengan data (Harrel et al, 2004).
Goodness of fit test dilakukan untuk mengukur deviasi distribusi sampel dari distribusi teoritisnya. Goodness of fit test yang biasa digunakan adalah chi-square test, Kolmogorov-Smirnov test, dan Anderson-Darling test.
Dalam Goodness of fit test menggunakan Chi-Square, pelaksanaan test dapat diuraikan dalam sembilan langkah:
1. Analisis data dan perkirakan distribusi yang sesuai.
2. Buat suatu distribusi frekwensi dari data dengan sel yang intervalnya sama dengan interval dari distribusi yang diperkirakan
3. Hitung frekwensi yang diharapkan (e ).tiap sel i
4. Sesuaikan sel apabila semua frekwensi yang diharapkan lebih kecil dari 5 5. Hitung Chi-Square test statistik dengan rumus
n i i i i hitung e e 1 2 2 0 ... (2-19)6. Tentukan derajat kebebasan 7. Pilih tingkat kepercayaan
8. Cari nilai kritis chi-square darib tabel chi-square
9. Tolak distribusi jika nilai chi-square melebihi nilai kritis.
Dalam Goodness of fit test menggunakan Kosmogorov-Smirnov test, penentuan nilai kritis dn,1 tergantung pada bagaimana distribusi hipotesis yang dipilih. Oleh karena itu, K-S test dibedakan dalam beberapa kasus (Law and Kelton, 2000), yaitu :
Kasus 1, jika seluruh parameter dari
F diketahui dan tidak ada parameter dari
F yang diestimasi dari data. Kita menolak H jika 0
1 11 , 0 12 , 0 D c n n n
Dimana c1diberikan pada TABEL 2-1 .
Kasus 2, jika distribusi hypotesisnya adalah N(,2) dengan dan 2 kedua-duanya tidak dilketahui. Kita dapat mengestimasi dan 2dengan X(n)dan
) ( 2
n
S , dan mendefinisikan fungsi distribusi F menjadi distribusi )) ( ), ( (X n S2 n
N . Kita menolak H jika 0
1 ' 85 , 0 01 , 0 D c n n n Dimana ' 1
c diberikan pada tabel TABEL 2-1 .
Kasus 3, jika distribusi hypotesisnya adalah exp()dengan tidak diketahui.
diperkirakan dengan MLE (Maximun Likehood Estimator)-nya, X(n). Dan kita definisikan
F menjadi fungsi distribusi exp(X(n)). Kita menolak H jika 0
1 '' 5 , 0 26 , 0 2 , 0 c D n n n Dn n
Dimana ''
1
c diberikan pada tabelTABEL 2-1 . TABEL 2-1 Nilai kritis c1, '
1
c , dan ''
1
c pada test Kosmogorov-Smirnov
Kasus Test statistik 1
0,850 0,900 0,950 0,975 0,990 Semua paramater diketahui 1 11 , 0 12 , 0 D c n n n 1,138 1.224 1,358 1,480 1,628 )) ( ), ( ( 2 n S n X N 1 ' 85 , 0 01 , 0 D c n n n 0,775 0,819 0,895 0,995 1,035 )) ( exp(X n 1 '' 5 , 0 26 , 0 2 , 0 c D n n n Dn n 0,926 0,990 1,094 1,190 1,308
2.15. Uji Kecukupan data
Uji kecukupan data ini harus dijalankan untuk menentukan jumlah data minimum yang harus tersedia. Jumlah data minimum dapat ditentukan dengan menggunakan persamaan : 2 2 2 E Z CV N ... (2-20) Dimana: Dimana :
N adalah jumlah data minimum CV adalah koefisien variansi E tingkat akurasi
Z nilai variansi untuk tingkat kepercayaan yang diinginkan 2.16. Distribusi t
Uji-t Dua sampel independen (independent to samples t test digunakan untuk membandingkan selisih dua purata (mean) yang independen dengan asumsi data terdistribusi normal.
Ada tiga bentuk untuk uji dimana penggunaannya tergantung persolan yang akan diuji:
1. Bentuk uji hipotesis satu sisi (one-sided atau one tailed test) untuk satu sisi bawah dengan hipotesis
2 1 1 2 1 : : H Ho atau 0 : 0 : 2 1 1 2 1 H Ho ... (2-21)
2. Bentuk uji hipotesis satu sisi (one-sided atau one tailed test) untuk satu sisi atas dengan hipotesis
2 1 1 2 1 : : H Ho atau 0 : 0 : 2 1 1 2 1 H Ho ... (2-22)
4. Bentuk uji hipotesis dua sisi (two-sided atau two tailed test) dengan hipotesis
2 1 1 2 1 : : H Ho atau 0 : 0 : 2 1 1 2 1 H Ho ... (2-23)
2.17. Validasi Model Sistem Dinamis
Pada dasarnya, terdapat 2 macam validitas yang harus dipenuhi sebuah model yaitu validitas struktur yang merupakan penilaian terhadap keserupaan struktur model dengan sistem nyata, serta validitas kinerja yang merupakan penilaian terhadap hasil output kinerja (perilaku) dari suatu model.
Validitas struktur model berkaitan dengan batasan sistem, variabel pembentuk sistem, dan asumsi mengenai interaksi yang terjadi dalam sistem. Pendekatan model sistem dinamis pada dasarnya berorientasi pada proses. Konsekuensinya, model dinilai valid ketika terdapat keserupaan struktur model dengan fakta interaksi yang terjadi sistem nyata. Validasi struktur dapat dilihat dari segi kesesuaian model, konsistensi model, utilitas, dan efektivitas struktur model. Validasi perilaku dalam model sistem dinamis diukur dari kemampuannya untuk menghasilkan ulang perilaku atau karakteristik suatu sistem yang menjadi referensi. Salah satu pengujian model adalah kemampuan untuk menghasilkan ulang pola referensi pada hasil keluarannya. Dengan kata lain, suatu model dikatakan valid bila model tersebut dapat menirukan kenyataan-kenyataan empiris
yang ada dan menghasilkan pola-pola kenyataan yang mungkin terjadi. Pengujian yang dapat dilakukan untuk menilai validitas perilaku model antara lain (Sterman, Pengujian yang dapat dilakukan untuk menilai validitas struktur model antara lain: 1. Uji kecukupan batasan
Uji kecukupan batasan digunakan untuk menilai :
▪ Apakah variabel-variabel penting yang menggambarkan permasalahan yang ingin dipecahkan telah diformulasikan secara endogen ?
▪ Apakah variabel eksogen dan variabel yang tidak dicakup dalam model dapat diterima dan tidak bertentangan dengan pengetahuan sistem nyata ?
Dengan pembatasan tersebut, apakah model telah dapat digunakan untuk memecahkan masalah sesuai dengan tujuan pemodelan yang dilakukan ?
2. Uji kesesuaian struktur
Uji kesesuaian struktur dilakukan untuk menguji :
▪ Apakah struktur model tidak berlawanan dengan pengetahuan yang ada tentang struktur dari sistem nyata ?
▪ Apakah struktur-struktur utama dari sistem nyata telah dimodelkan ? ▪ Apakah level agregasi dalam pemodelan dapat diterima ?
Tingkat kepercayaan atas ketepatan struktur model akan meningkat jika hasil pengujian menunjukkan bahwa struktur model tidak berlawanan dengan pengetahuan tentang struktur sistem nyata dan juga jika struktur-struktur utama dalam sistem nyata telah dimodelkan.
3. Uji konsistensi dimensi
Uji ini dilakukan untuk memeriksa keseimbangan dimensi peubah pada kedua sisi persamaan. Model harus menjamin keseimbangan dimensi antara peubah bebas dan peubah terikat yang membentuknya.
Pengujian yang dapat dilakukan untuk menilai validitas perilaku antara lain: 1. Uji Reproduksi Perilaku
Uji reproduksi perilaku digunakan untuk membandingkan perilaku model dengan perilaku sistem nyata. Untuk menilai kesesuaian perilaku model dengan sistem nyata, dapat digunakan uji statistik, salah satu yang biasa dipakai adalah statistik Theil Inequality (Sterman, 2000). Pengujian statistik Theil Inequality ini melibatkan beberapa alat pengujian statistik seperti Mean Square Error (MSE), Mean Absolute Error (MAE), bias (UM), unequal variation (US), unequal covariation (UC), serta r (koefisien korelasi). Bias terjadi jika output model dan data aktual memiliki rataan yang berbeda, unequal variation mengindikasikan bahwa variansi antara output model dengan data aktual berbeda, sedangkan unequal covariation berarti output model dan data aktual berkorelasi dengan sempurna namun berbeda pada setiap titik-titiknya. Formulasi statistik Theil Inequality adalah sebagai berikut:
Error! Objects cannot be created from editing field codes.
Error! Objects cannot be created from editing field codes. : Bias Error! Objects cannot be created from editing field codes.
Error! Objects cannot be created from editing field codes. : Unequal Variation
Error! Objects cannot be created from editing field codes.
Error! Objects cannot be created from editing field codes. : Unequal Covariation
Error! Objects cannot be created from editing field codes.
Error! Objects cannot be created from editing field codes. Error! Objects cannot be created from editing field codes. : Correlation Coefficient
Error! Objects cannot be created from editing field codes.
Error! Objects cannot be created from editing field codes. : Mean Error! Objects cannot be created from editing field codes.
Error! Objects cannot be created from editing field codes. : Standard Deviation
Error! Objects cannot be created from editing field codes. Error! Objects cannot be created from editing field codes. : Mean Square Error Error! Objects cannot be created from editing field codes. : Data Size Error! Objects cannot be created from editing field codes. : Index for Model Output Error! Objects cannot be created from editing field codes. : Index for Data Series
2. Uji Model pada Kondisi Ekstrem
Dalam uji ini, model dicoba pada kondisi ekstrem. Ketika model dicoba pada kondisi yang ekstrem, model harus mampu menunjukkan robustness-nya, dimana perilaku model mengikuti perilaku alami suatu kejadian.
3. Uji Kesalahan Integrasi
Uji kesalahan integrasi digunakan untuk memeriksa sensitivitas model terhadap pemilihan time step dan metode integrasi dalam simulasi.
4. Uji Prediksi Perilaku
Uji prediksi perilaku dilakukan dengan tes prediksi kejadian (event prediction test) yang memfokuskan pada dinamika alami suatu kejadian. Uji ini digunakan untuk melihat respon perilaku model ketika dilakukan perubahan secara tiba-tiba pada suatu peubah.
2.18. Jenis model Bahasa Simulasi
Pemograman komputer mempunyai peranan penting dalam simulasi karena kemampuan komputer memiliki kecepatan dalam melakukan proses-proses perhitungan. Bahasa pemrograman komputer dibagi menjadi dua yaitu bahasa pemrograman umum dan bahasa khusus simulasi. Yang termasuk dalam klasifikasi bahasa pemrograman umum adalah bahasa BASIC, FORTRAN, PASCAL, C, dengan masing-masing pengembangannya. Sedangkan dalam klasifikasi bahasa khusus simulasi adala POWER SIM, STELLA, DYNAMO, PROMODEL, dan sebagainya.
2.19. Penelitian terdahulu
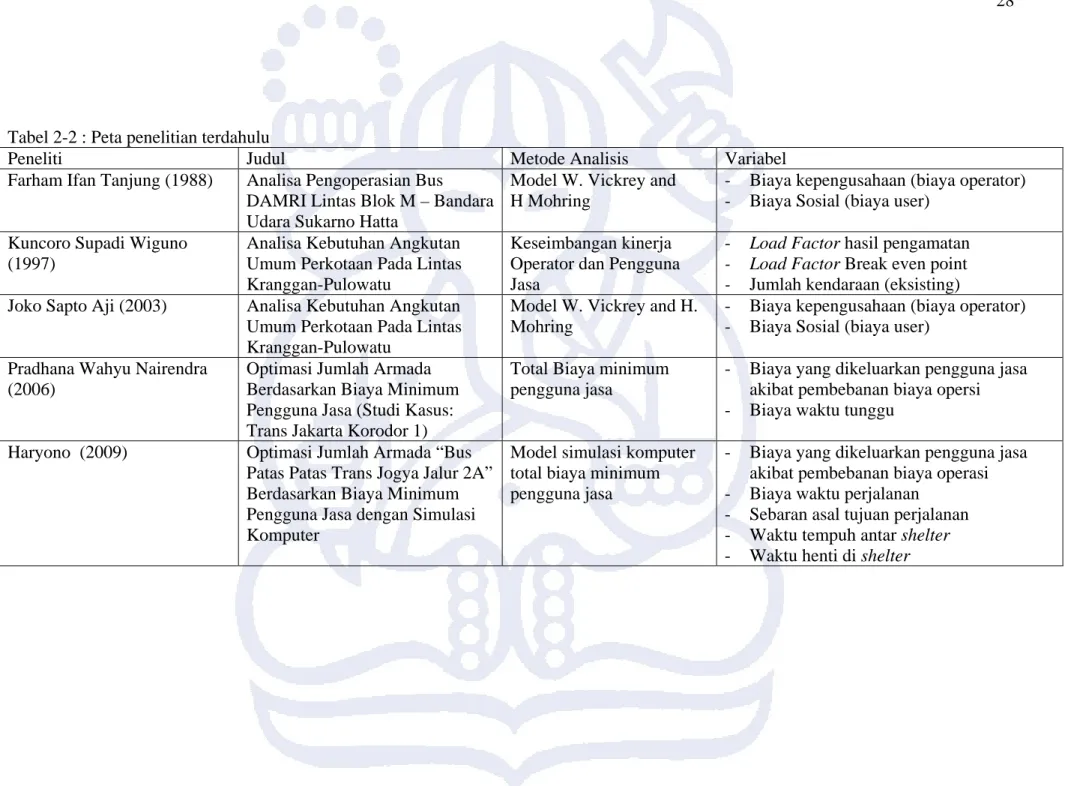
Tabel 2-2 : Peta penelitian terdahulu
Peneliti Judul Metode Analisis Variabel
Farham Ifan Tanjung (1988) Analisa Pengoperasian Bus
DAMRI Lintas Blok M – Bandara Udara Sukarno Hatta
Model W. Vickrey and H Mohring
- Biaya kepengusahaan (biaya operator) - Biaya Sosial (biaya user)
Kuncoro Supadi Wiguno (1997)
Analisa Kebutuhan Angkutan Umum Perkotaan Pada Lintas Kranggan-Pulowatu
Keseimbangan kinerja Operator dan Pengguna Jasa
- Load Factor hasil pengamatan
- Load Factor Break even point
- Jumlah kendaraan (eksisting)
Joko Sapto Aji (2003) Analisa Kebutuhan Angkutan Umum Perkotaan Pada Lintas Kranggan-Pulowatu
Model W. Vickrey and H. Mohring
- Biaya kepengusahaan (biaya operator) - Biaya Sosial (biaya user)
Pradhana Wahyu Nairendra (2006)
Optimasi Jumlah Armada Berdasarkan Biaya Minimum Pengguna Jasa (Studi Kasus: Trans Jakarta Korodor 1)
Total Biaya minimum pengguna jasa
- Biaya yang dikeluarkan pengguna jasa akibat pembebanan biaya opersi - Biaya waktu tunggu
Haryono (2009) Optimasi Jumlah Armada “Bus Patas Patas Trans Jogya Jalur 2A” Berdasarkan Biaya Minimum Pengguna Jasa dengan Simulasi Komputer
Model simulasi komputer total biaya minimum pengguna jasa
- Biaya yang dikeluarkan pengguna jasa akibat pembebanan biaya operasi - Biaya waktu perjalanan
- Sebaran asal tujuan perjalanan - Waktu tempuh antar shelter - Waktu henti di shelter