BAB II
LANDASAN TEORI
2.1 PLC (Programmable Logic Controller)
Untuk mengendalikan suatu proses yang komplek, maka diperlukan suatu
controller yang mampu mengatur setiap instruksi dengan cepat dan tepat, satu controller yang paling banyak dipakai oleh industri untuk mengatur sekian banyak
proses adalah PLC. 2.1.1. Pengertian PLC
PLC (Programmable Logic Controller) adalah sebuah alat yang digunakan untuk menggantikan rangkaian sederetan relai yang dijumpai pada sistem kontrol proses konvensional. PLC bekerja dengan cara mengamati masukan melalui sensor-sensor terkait, kemudian melakukan proses dan melakukan tindakan sesuai yang dibutuhkan, yang berupa menghidupkan atau mematikan keluarannya.
Semakin kompleks proses yang harus ditangani maka semakin penting penggunaan PLC untuk mempermudah proses-proses tersebut dan sekaligus menggantikan beberapa alat yang diperlukan.
2.1.2. Komponen-Komponen PLC
Pada kenyataannya PLC merupakan suatu microcontroller yang digunakan untuk keperluan industri.
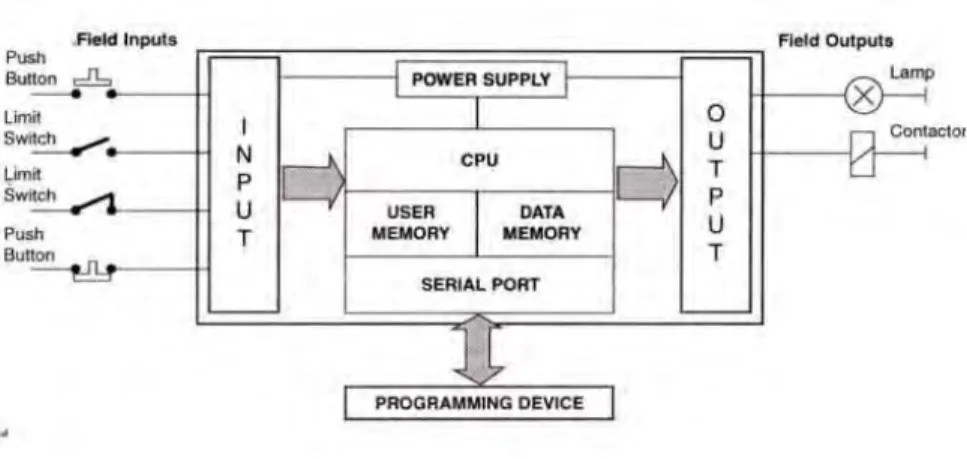
Gambar 2.1. Komponen-komponen PLC
Terdapat 5 (lima) komponen utama yang menyusun suatu PLC. Semua komponen tersebut harus ada untuk dapat menjalankan suatu PLC secara normal. Komponen-komponen utama dari suatu PLC, sebagai berikut :
1. CPU (Central Processing Unit)
CPU merupakan bagian utama dan merupakan otak dari PLC. CPU ini berfungsi untuk melakukan komunikasi dengan PC atau Console, interkoneksi pada setiap bagian PLC, mengeksekusi program-program, serta mengatur input dan ouput sistem
2. Memori
Memori didalam PLC digunakan untuk menyimpan data dan program. Secara fisik, memori ini berupa chip dan untuk pengaman dipasang baterai back-up pada PLC.
3. Power Supply
Unit power supply atau unit catu daya diperlukan untuk mengkonversi tegangan masukan AC (220Volt ~ 50Hz) atau DC (24Volt) sumber menjadi tegangan rendah DC 5 Volt yang dibutuhkan oleh prosesor dan rangkaian-rangkaian data input/output interface. Kegagalan dalam pemenuhan
tegangan oleh power supply dapat menyebabkan kegagalan operasi PLC. Untuk itu diperlukan adanya baterai cadangan dengan tujuan agar pada saat voltage dropping, data yang ada pada memori tidak hilang.
4. Pemrograman
Komponen pemrograman merupakan alat yang digunakan untuk berkomunikasi dengan PLC. Pemograman mempunyai beberapa fungsi yaitu :
RUN, untuk mengendalikan suatu proses saat program dalam keadaan aktif.
OFF, untuk mematikan PLC sehingga program dibuat tidak dapat dijalankan.
MONITOR, untuk mengetahui keadaan suatu proses yang terjadi dalam PLC.
PROGRAM, menyatakan suatu keadaan dimana programmer/ monitor digunakan untuk membuat suatu program.
Kontrol PLC dapat diprogram melalui komputer, tetapi juga bisa diprogram melalui pemrograman manual, yang biasa disebut dengan console. Untuk keperluan ini dibutuhkan perangkat lunak, yang biasanya juga bergantung pada produk PLC-nya.
5. Input / Output
Unit Input/output menyediakan antarmuka yang menghubungkan sistem dengan dunia luar, memungkinkan dibuatnya sambungan-sambungan/koneksi antara perangkat-perangkat input, semisal sensor, dengan perangkat output, semisal motor dan selenoida, melalui kanal-kanal
PERIKSA STATUS MASUKAN EKSEKUSI PROGRAM UPDATE STATUS KELUARAN
input/output. Demikian pula, melalui unit input/output, program-program dimasukkan dari panel program. Setiap titik input/output memiliki sebuah alamat unik yang dapat digunakan oleh CPU.
2.1.3. Operasional PLC
Sebuah PLC bekerja secara kontinyu dengan cara men-scan program. Ibaratnya kita bisa mengilustrasikan satu siklus scan ini menjadi 3 langkah atau 3 tahap. Umumnya lebih dari 3 tetapi secara garis besarnya ada 3 tahap sebagaimana ditunjukkan pada gambar 2.2.
Gambar 2.2 Proses Scanning Program PLC Keterangan :
1. Periksa status masukan, pertama PLC akan melihat masing-masing status keluaran apakah kondisinya sedang ON atau OFF. Dengan kata lain, apakah sensor yang terhubungkan dengan masukan pertama ON, Bagaimana dengan yang terhubungkan pada masukan kedua . Demikian seterusnya, hasilnya disimpan ke dalam memori yang terkait dan akan digunakan pada langkah berikutnya.
2. Eksekusi Program, berikutnya PLC akan mengerjakan atau mengeksekusi program (diagram tangga) per instruksi. Mungkin program mengatakan bahwa masukan pertama statusnya ON maka keluaran pertama akan di-
kan. Karena PLC sudah tahu masukan yang mana saja yang ON dan OFF, dari langkah pertama dapat ditentukan apakah memang keluaran pertama harus di ON kan atau tidak (berdasarkan status masukan pertama). Kemudian akan menyimpan hasil eksekusi untuk digunakan kemudian. 3. Perbaharui status keluaran, akhirnya PLC akan memperbaharui atau
mengupdate status keluaran. Pembaharuan keluaran ini bergantung pada masukan mana yang ON selama langkah 1 dan hasil dari eksekusi program di langkah 2. Jika masukan pertama statusnya ON, maka dari langkah 2, eksekusi program akan menghasilkan keluaran pertama, sehingga pada langkah 3 ini keluaran pertama akan diperbaharui menjadi ON.
Setelah langkah 3, PLC akan mengulangi lagi scanning program-nya dari langkah 1, demikian seterusnya. Waktu scan didefinisikan sebagai waktu yang dibutuhkan untuk mengerjakan tiga langkah tersebut. Masing- masing langkah bisa memiliki waktu tanggap (response time) yang berbeda-beda, waktu total tanggap atau total response time adalah jumlah semua waktu tanggap masing-masing langkah.
2.1.4. Software Pemrograman
Software pemrogramman merupakan suatu perangkat lunak yang digunakan untuk membuat dan mengisikan instruksi pada memori control suatu system komputer (PLC). Untuk melakukan pemrogramman PLC dan HMI menggunakan software yang telah disediakan pabrik pembuat/vendor PLC dan HMI.
XG5000 merupakan software pemrogramman PLC dengan brand LS untuk seri XGB, XGK, XGI dan XGR.Software ini dapat melakukan pemrogramman dengan menggunakan bahasa diagram tangga (ladder diagram), SFC (Structure
Function Chart), Structure text dan function block. Atau dengan kata lain PLC
deprogram dengan text dan pemrogramman berorientasi object. 2.1.5. PLC XGB
Seperti yang telah diketahui PLC secara umum memiliki jenis dan keunggulan masing masing, PLC XGB merupakan sebuah PLC keluaran LS
Industrial Systems yang memiliki banyak keunggulan seperti kecepatan eksekusi
perintah hingga 0,028 u S/command.
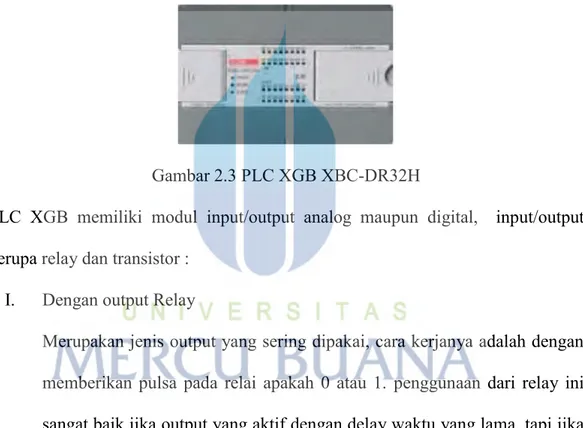
Gambar 2.3 PLC XGB XBC-DR32H
PLC XGB memiliki modul input/output analog maupun digital, input/output berupa relay dan transistor :
I. Dengan output Relay
Merupakan jenis output yang sering dipakai, cara kerjanya adalah dengan memberikan pulsa pada relai apakah 0 atau 1. penggunaan dari relay ini sangat baik jika output yang aktif dengan delay waktu yang lama, tapi jika digunakan pada delay waktu yang pendek antara satu perioda, maka akan mengakibatkan relay akan cepat aus.
II. Dengan Output Transistor
Merupakan jenis output yang sering digunakan untuk mengatur instrusi yang mana delay waktu antara kondisi ON dan OFF memiliki delai yang
singkat. PLC dengan ouput transistor sering digunakan sebagai penghitung pulse pada suatu sistem.
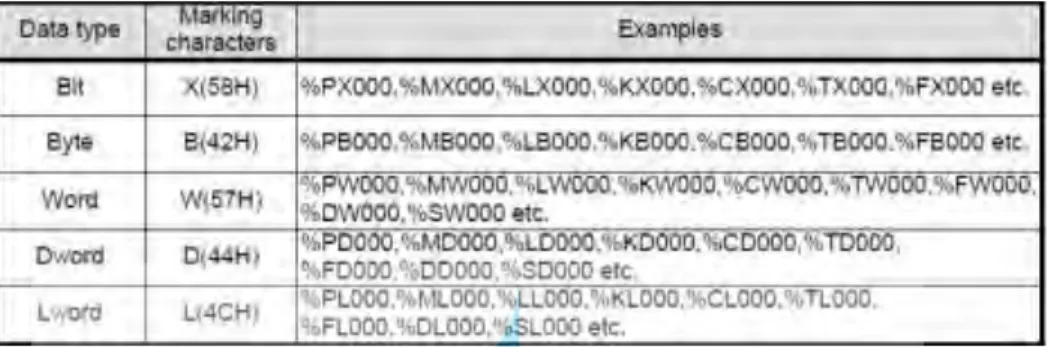
PLC XGB memiliki sistem bilangan sebagai berikut : Tabel 2.1 Tipe Data PLC XGB
Sistem bilangan pada PLC XGB terdiri dari Bit, Byte, Word, Dword dan Lword. Pada table 2.2 dapat dilihat bahwa tipe data PLC XGB memiliki ukuran 128-5120 word. Besaran word data merupakan ukuran lebar data yang mampu ditampung oleh suatu tipe data.
Tabel 2.2 Tipe Bilangan PLC XGB
Maisng-masing device memiliki range yang berbeda. Contoh pada device P memiliki range dari P0-P127 ini artinya alamat awal dari P0 sampai dengan akhir P127, begitu juga device yang lain.
2.2 Layar Sentuh (Touch Screen)
Touch panel atau Touch Screen panel adalah layar tampilan komputer yang
sensitif terhadap sentuhan manusia, sehingga seseorang dapat berinteraksi dengan komputer dengan cara menyentuh gambar atau tulisan yang terpampang pada layar komputer.
2.2.1. Cara Kerja Layar Sentuh (Touch Screen)
Sebuah layar Touch Screen yang paling sederhana terdiri dari tiga buah komponen utama dalam bekerja. Komponen tersebut adalah sebagai berikut:
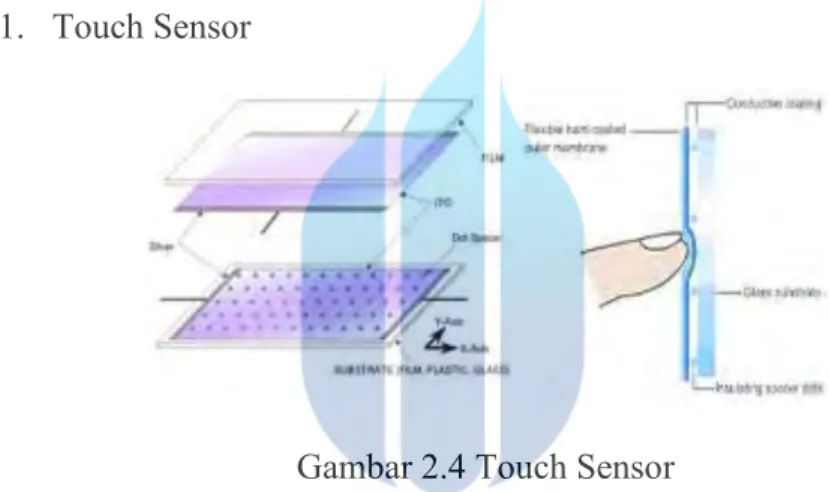
1. Touch Sensor
Gambar 2.4 Touch Sensor
Touch sensor merupakan sebuah lapisan penerima input dari luar layar. Input dari Touch Screen adalah sebuah sentuhan, maka dari itu sensornya juga merupakan sensor sentuh. Biasanya sensor sentuh berupa sebuah panel terbuat dari kaca yang permukaannya sangat
responsive jika disentuh. Touch sensor ini diletakkan di permukaan
paling depan dari sebuah layar touch screen, dengan demikian area yang
responsive terhadap sentuhan menutupi area pandang dari layar
2. Controller
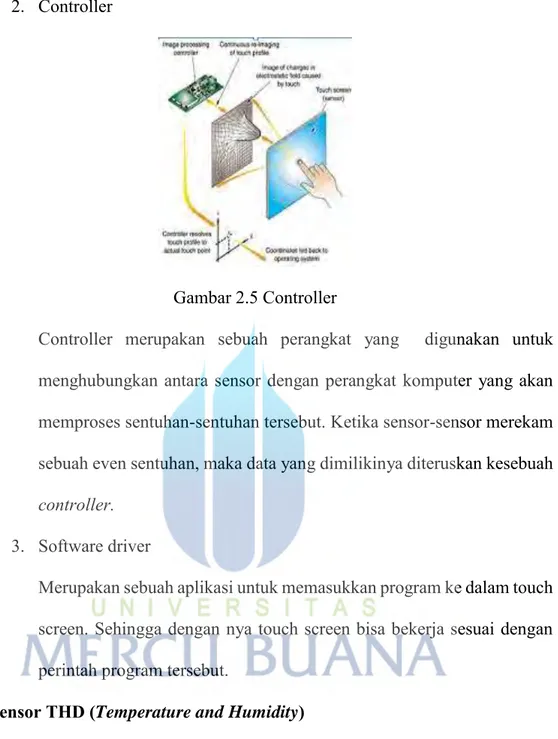
Gambar 2.5 Controller
Controller merupakan sebuah perangkat yang digunakan untuk menghubungkan antara sensor dengan perangkat komputer yang akan memproses sentuhan-sentuhan tersebut. Ketika sensor-sensor merekam sebuah even sentuhan, maka data yang dimilikinya diteruskan kesebuah
controller.
3. Software driver
Merupakan sebuah aplikasi untuk memasukkan program ke dalam touch screen. Sehingga dengan nya touch screen bisa bekerja sesuai dengan perintah program tersebut.
2.3 Sensor THD (Temperature and Humidity)
Masalah utama dalam teknik pengukuran, pengaturan dan pengendalian secara elektronik adalah mengubah besaran fisik menjadi besaran listrik yang proporsional. Besaran fisik yang diubah tersebut bisa berupa temperatur, gaya, kecepatan putaran, intensitas cahaya dan sebagainya.
Alat yang melaksanakan hal ini secara umum disebut sensor. Termasuk dalam golongan ini adalah baik sensor yang sederhana maupun alat pemroses
sinyal elektronik yang terhubung sesudahnya (penguat, kompensasi suhu, linearisasi, dll).
Gambar 2.6 Sensor THD (Temperature and Humidity)
Dalam hal ini karakteristik yang dimiliki sensor THD (Temperature and Humidity) adalah :
1. Bekerja pada rating temperature -19.9 sampai dengan 60 oC
2. Bekerja pada rating kelembaban 0.0 sampai dengan 99.9 % RH 3. Mempunyai tegangan kerja antara 1-5VDC
4. Tegangan input power supply 24VDC
5. Menggunakan komunikasi Modbus RTU serial RS-485 2.4 Protocol Modbus
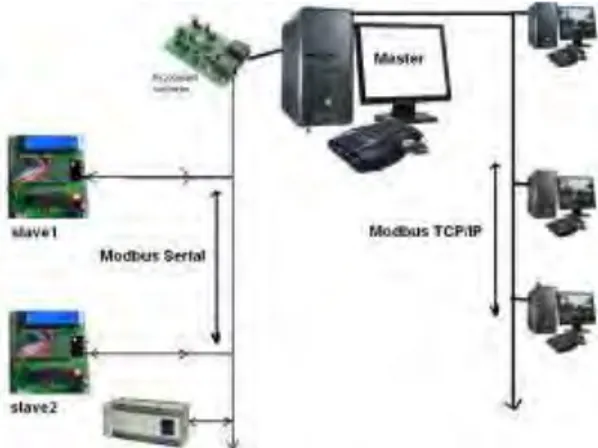
Protocol modbus dibuat oleh perusahaan PLC bernama Modicon tahun 1979 dan sampai sekarang menjadi salah satu prtotocol komunikasi standar yg dipakai dalam Automatisasi pengelolaan Gedung, Proses Industri dll.
Gambar 2.7 Jaringan Protokol Modbus 2.4.1. Jenis Modbus
Beberapa variasi Modbus, antara lain:
a. Modbus RTU - Merupakan varian Modbus yang ringkas dan digunakan pada komunikasi serial. Format RTU dilengkapi dengan mekanisme cyclic redundancy error (CRC) untuk memastikan keandalan data. Modbus RTU merupakan implementasi protokol Modbus yang paling umum digunakan. Setiap frame data dipisahkan dengan periode idle (silent).
b. Modbus ASCII - Digunakan pada komunikasi serial dengan memanfaatkan karakter ASCII. Format ASCII menggunakan mekanisme longitudinal
redundancy check (LRC). Setiap frame data Modbus ASCII diawali dengan
titik dua (":") dan baris baru yang mengikuti (CR/LF).
c. Modbus TCP/IP atau Modbus TCP - Merupakan varian Modbus yang digunakan pada jaringan TCP/IP.
2.4.2. Penyimpanan Data Pada Modbus
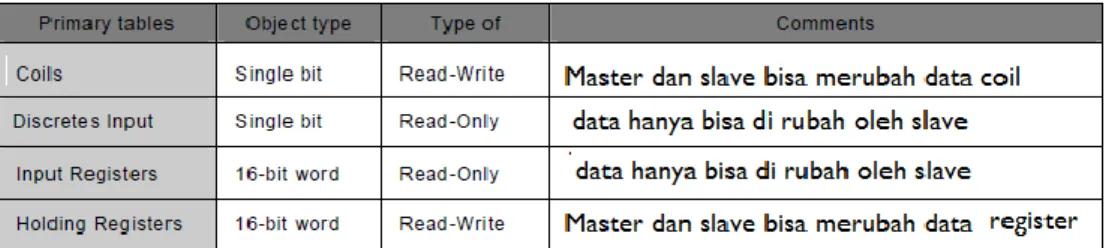
Tabel 2.3 Penyimpanan data pada Modbus
Keterangan : 1. Coil,
Pada mulanya jenis data ini digunakan untuk mengaktifkan coil relay. Nilai jenis data ini ON atau OFF. Coil mempunyai panjang 16 bit, sehingga untuk mengaktifkan/ON dengan cara memberi nilai FF00H dan 0000H untuk OFF. Data FF00 dan 00 disimpan di register 00000 sampai 09999. 2. Input Digital,
Input digital digunakan untuk mengetahui status relay apakah sedang ON atau OFF. Input relay bersifat read only bagi master dan hanya bisa dirubah oleh slave saja. Data tersebut disimpan di register 10001 sampai 19999. 3. Input Register,
Input Register digunakan untuk menyimpan data analog dengan range nilai 0 - 65535. Input register bersifat read only bagi master. Data ini disimpan di register nomor 30001 sampai 39999.
4. Holding Register,
Holding Register digunakan untuk menyimpan nilai dengan range 0–65535. Data ini mempunyai alamat register 40001 sampai 49999.
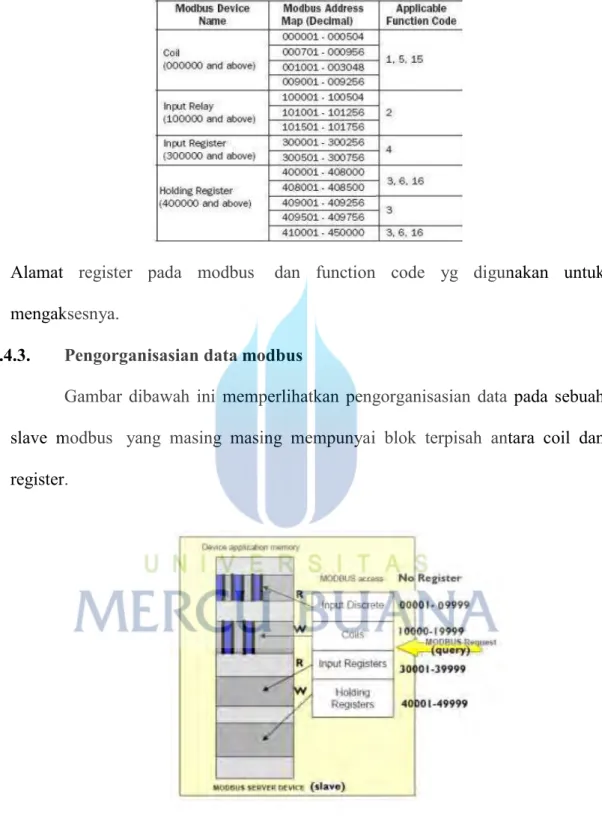
Tabel 2.4 Alamat Register dan Function Code
Alamat register pada modbus dan function code yg digunakan untuk mengaksesnya.
2.4.3. Pengorganisasian data modbus
Gambar dibawah ini memperlihatkan pengorganisasian data pada sebuah slave modbus yang masing masing mempunyai blok terpisah antara coil dan register.
Gambar dibawah ini memperlihatkan pengorganisasian data pada sebuah slave modbus yang hanya mempunyai satu blok untuk coil dan register.
Gambar2.9 Pengorganisasian Data Memory
2.4.4. Frame Data Modbus
Master atau slave berkomunikasi dgn cara mengirim frame permintaan dan frame respon . secara umum format frame Modbus sebagai berikut :
Gambar 2.10 Frame Modbus Frame modbus terdiri dari :
1. Alamat slave
Byte pertama sebagai Alamat slave terdiri dari 1 byte . alamat slave ditentukan hanya 1 ~ 247. alamat 0 digunakan master untuk ditujukan kepada semua slave.
2. Function Code
Byte kedua berupa Function Code , perintah dari master yang harus dilakukan oleh slave berikut ini daftar kode perintah perintah tsb (function code)
Tabel 2.5 Data Function Code
Data Membaca menulis 1 data menulis banyak data no awal reg Coil FC01 FC05 FC15 00001 input diskrit/digital FC02 10001 Input register FC04 30001 Holding Register FC03 FC06 FC16 40001
FC15 maksudnya adalah function code 15 desimal atau 0F dlm hexa.
3. Byte Data
Jumlah Byte Data bervariasi tergantung jumlah data yg akan di tuliskan ke slave. Byte data berisi alamat register, jumlah data, dan data yg akan ditulis. alamat register akan di jelaskan kemudian.
4. Eror Check, CRC
Dua byte terakhir adalah byte CRC , byte ini digunakan untuk mendeteksi jika ada kesalahan pada frame modbus .
2.4.5. Respon Modbus Exception
Respon exeception adalah respon dari slave ketika terjadi keadaan tidak normal/error. Slave menerima query , tetapi Slave tidak dapat menangani perintah tersebut, Slave akan mengirimkan sebuah respon exception. Frame respon jika terjadi kesalahan berbeda dgn frame dalam keadaan normal.
Gambar 2.12 Modbus Transaction Perbedaan frame modbus normal dan saat terjadi exception
2.5 Komunikasi Serial RS-485
Standard RS-485 mendukung komunikasi data half-duplex, ini berarti bahwa untuk mengirimkan dan menerima data hanya menggunakan 2 jalur kabel. Spesifikasi dari standar ini mampu mendukung komunikasi data dari sejumlah perangkat dan juga mampu menyangga komunikasi data dalam jarak hingga 1200 meter. Sambungan dari tiap perangkat yang terhubung ke RS-485 dilakukan secara paralel, sehingga penyambungan maupun pelepasan perangkat dapat dilakukan tanpa mengganggu kerja seluruh jaringan.
Untuk menyesuaikan impedansi kabel yang digunakan perlu dipasang resistor yang nilainya disesuaikan dengan karakteristik impedansi kabel (~ 120 Ohm). Topologi jaringan komunikasi data menggunakan RS-485 dapat dilihat pada gambar berikut :
Gambar 2.14. Topologi Pengkabelan RS485
RS485 atau EIA (Electronic Industries Association) RS485 adalah jaringan
balanced line dan dengan sistem pengiriman data secara half-duplex. RS485 bisa
digunakan sebagai jaringan transfer data dengan jarak maksimal 1,2 km. Tabel berikut adalah ringkasan spesifikasi dari protokol RS485:
Tabel 2.6.Parameter RS-485
Dalam jaringan RS485, “master” akan memulai “pembicaraan” dengan sebuah “Query” (pertanyaan) yang dialamatkan pada salah satu “slave”, “master” kemudian akan mendengarkan jawaban dari “slave”. Jika “slave” tidak merespon dalam waktu yang ditentukan, (diseting oleh kontrol software dalam “master”), “master” akan memutus pembicaraan.
2.5.1. Cara Kerja Komunikasi RS485
Untuk menghubungkan instrumen pada jaringan RS485, harus menggunakan kabel khusus yang didisain untuk komunikasi RS485 sebagai contoh: “Screened twisted pair cable”, “impedansi 120ohm”,”kapasitansi tidak lebih dari 18pf/ft”. Spesifikasi kabel tersebut diperlukan bila ingin mendapatkan jarak yang optimal yaitu sampai dengan 1,2km. Bila hanya untuk percobaan dengan jarak pendek dibawah 10meter, bisa digunakan kabel apa saja. Semua koneksi sisi “A” harus digabungkan bersama dengan sebuah konduktor dari twisted pair cable, dan semua koneksi sisi “B” juga harus digabungkan menjadi satu dengan menggunakan satu konduktor yang lain dari twisted pair cable tersebut. Dan yang paling penting
untuk menghindari noise, EMI (Electro Magnetic Interference) dan surge, cable
screen (serabut luar kabel) harus dihubungkan ke terminal “Gnd”.
Sebagai contoh jenis kabel yang bisa digunakan adalah Belden 9841 (Single pair) atau 9842 (Two pair) dengan karakteristik impedansi sebesar 120ohm. Kabel tersebut sangat direkomendasikan. Karena koneksi RS485 bersifat multi-drop (party-line) maka pada ujung koneksi instrumen pada jaringan modbus harus diterminasi dengan resistor sebesar 120ohm seperempat watt atau yang lebih besar. Termination resistor biasanya sudah disediakan dan switchable bila anda membeli unit instrument pabrikan. Untuk pemilihan jumlah pair pada kabel harus disesuaikan dengan kebutuhan, misal anda ingin menggabungkan catudaya DC24Volt pada satu kabel dengan komunikasi data, maka anda bisa menggunakan Belden 9842 (Two pair) dan jika dalam satu kabel hanya diperuntukkan untuk komunikasi data, anda bisa menggunakan Belden 9841 (Single pair).
Gambar 2.15 Koneksi RS-485
Dalam jaringan RS485 tidak boleh ada lebih dari dua kabel yang terhubung dalam satu terminal. Konfigurasi yang harus digunakan adalah “Daisy Chain” atau “straight line” atau jaringan satu arah antara master dan slave-nya.
Konfigurasi “Star” atau jaringan dengan “Stubs (Tees)” atau percabangan tidak direkomendasikan karena bisa mengakibatkan sistem tidak berjalan sesuai harapan (terjadi korupsi data).
Gambar 2.16 Cara Menghubungkan RS-485
Berikut adalah datasheet dari kabel yang direkomendasikan untuk koneksi RS485:
1. Belden 9841 (Single twisted pair cable) dengan beldfoil dan braid shiled, impedansi 120 ohms, kapasitansi 12pf/ft, 24AWG, arus maksimal 2,1A/conductor.
2. Belden 9842 (Double twisted pair cable) dengan beldfoil dan brid shield, impedansi 120ohms, kapasitansi 12pf/ft, 24AWG, arus maksimal 2,1A/conductor.
3. Belden 89842 (Double twisted pair cable) dengan Plenum rated (Cable untuk dipasang di plenum space). dengan beldfoil dan braid shield, impedansi 120ohms, kapasitansi 12pf/ft, 24AWG, arus maksimal 2,1A/conductor.
2.6 Relay
Relay adalah saklar (switch) elektrik yang bekerja berdasarkan medan magnet. Relay terdiri dari suatu lilitan dan switch mekanik. Switch mekanik akan bergerak jika ada arus listrik yang mengalir melalui lilitan.
Besarnya gaya magnet ditetapkan oleh kuat medan yang ada dalam celah udara antara jangkar dengan inti magnet. Kuat medan magnet ini tergantung banyaknya lilitan dan kuat arus yang mengalir atau disebut dengan ampere lilitan. Kuat medan magnet juga ditetapkan oleh besarnya perlawanan magnet yang ada dalam sirkuit permanen, untuk memperbesar kuat medan magnet diperlukan rangkaian pemagnetan tertutup oleh inti besi. Susunan kontak pada relay adalah:
a. Normally Open : Relay akan menutup bila dialiri arus listrik. b. Normally Close : Relay akan membuka bila dialiri arus listrik.
c. Changeover : Relay ini memiliki kontak tengah yang akan melepaskan diri dan membuat kontak lainnya berhubungan.
Gambar 2.17 Relay 2.7 Catu Daya (Power supply)
Perangkat elektronika mestinya dicatu oleh suplai arus searah DC (direct
current) yang stabil agar dapat bekerja dengan baik. Baterai atau accu adalah
sumber catu daya DC yang paling baik. Namun untuk aplikasi yang membutuhkan catu daya lebih besar, sumber dari baterai tidak cukup. Sumber catu daya yang
besar adalah sumber bolak-balik AC (alternating current) dari pembangkit tenaga listrik. Untuk itu diperlukan suatu perangkat catu daya yang dapat mengubah arus AC menjadi DC.
1. Penyearah (Rectifier) dan Tapis (Filter)
Agar tegangan penyearahan gelombang AC lebih rata dan menjadi tegangan DC maka dipasang filter kapasitor pada bagian output rangkaian penyearah seperti terlihat pada gambar berikut :
Gambar 2.18 Penyearah Jembatan Dengan Filter Capasitor
Rectifier jembatan menyerupai rectifier gelombang penuh sebab ia memproduksi tegangan keluaran gelombang penuh. Dioda-dioda D1 dan D2 menghantar di atas setengan periode positif dan D3 dan D4 menghantar di atas setengah periode negatif. Sebagai hasilnya arus beban rectifier mengalir selama diantara setengah periode.
Fungsi kapasitor pada rangkaian diatas untuk menekan riple yang terjadi dari proses penyearahan gelombang AC. Setelah dipasang filter kapasitor maka output dari rangkaian penyearah gelombang penuh ini akan menjadi tegangan DC (Direct Current) yang dpat diformulasikan sebagai berikut :
V
DC =2V
MAX∏
Kemudian untuk nilai riple tegangan yag ada dapat dirumuskan sebagai berikut :
V
Riple =I
LoadF.C
2. Voltage Regulator
Rangkaian penyearah sudah cukup bagus jika tegangan ripple-nya kecil, namun ada masalah stabilitas. Jika tegangan PLN naik/turun, maka tegangan outputnya juga akan naik/turun. Seperti rangkaian penyearah di atas, jika arus semakin besar ternyata tegangan dc keluarnya juga ikut turun. Untuk beberapa aplikasi perubahan tegangan ini cukup mengganggu, sehingga diperlukan komponen aktif yang dapat meregulasi tegangan keluaran ini menjadi stabil.
Regulator Voltage berfungsi sebagai filter tegangan agar sesuai dengan keinginan. Oleh karena itu biasanya dalam rangkaian power supply maka IC Regulator tegangan ini selalu dipakai untuk stabilnya outputan tegangan. Berikut susunan kaki IC regulator tersebut.
Gambar 2.19 IC Regulator
Misalnya 7805 adalah regulator untuk mendapat tegangan +5 volt, 7812 regulator tegangan +12 volt dan seterusnya. Sedangkan seri 79XX misalnya adalah 7905 dan 7912 yang berturut-turut adalah regulator tegangan -5 dan -12 volt.
Gambar 2.20 Regulator dengan IC 78XX / 79XX
Hanya saja perlu diketahui supaya rangkaian regulator dengan IC tersebut bisa bekerja, tegangan input harus lebih besar dari tegangan output regulatornya. Biasanya perbedaan tegangan Vin terhadap Vout yang
direkomendasikan ada di dalam datasheet komponen tersebut. Pemakaian heatshink (aluminium pendingin) dianjurkan jika komponen ini dipakai untuk men-catu arus yang besar. Di dalam datasheet, komponen seperti ini maksimum bisa dilewati arus mencapai 1 A.