25
BAB III
SURVEI KONSTRUKSI PIPA BAWAH LAUT
DI ANJUNGAN MINYAK LEPAS PANTAI
Dalam survei konstruksi akan dilakukan kegiatan survei dan navigasi untuk memandu pergerakan barge baik dalam proses instalasi pipa bawah laut (push pull, tie-in) maupun pada saat proses peletakan pipa bawah laut sepanjang jalur pipa bawah laut rencana. Hasil akhir yang didapat dari survei konstruksi adalah distribusi jalur pipa yang telah terpasang di dasar laut (actual pipeline) dengan asumsi bahwa koordinat prediksi (sementara) dari pipa bawah laut yang telah terpasang merupakan koordinat touchdown point (TDP) dari pergerakan barge (barge tracking).
Untuk mengidentifikasi jarak segmen pada jalur pipa bawah laut rencana digunakan istilah kilometre post (KP). Pada peta batimetri digital dari hasil survei pendahuluan, dapat diamati bahwa pada jalur pipa bawah laut rencana semakin ke kanan (ke arah timur) nilai KP semakin positif (+) atau semakin besar nilainya dan sebaliknya semakin ke kiri (ke arah barat) nilai KP semakin mengecil atau negatif (-). Untuk lebih jelasnya, berikut disajikan gambar jalur pipa bawah laut rencana yang telah selesai dikonstruksi dari MCOT landing point ke WLP-A platfrom, dari WLP-A platform ke WLDP-C platform dan dari MCOT landing point ke arah laut lepas :
Gambar 3.1 Jalur pipa bawah laut rencana (jalur MCOT – WLPA Platform
26 Berikut disajikan koordinat-koordinat jalur pipa bawah laut rencana dari offshore ke onshore :
Tabel 3.1 Koordinat-koordinat jalur pipa bawah laut rencana [Data survei pendahuluan, 2006]
Jalur Pipa Bawah Laut
Koordinat
Geografis BRSO (feet) BRSO (m)
4° 29’ 50.266” N 1538467 ft E 468924.7416 mE
Existing WLP-A Platform
(KP 0.000) 113° 54’ 21.942” E 1632305 ft N 497526.5640 mN 4° 28’ 53.964” N 1570841 ft E 478792.3368 mE
Proposed MCOT
LandingPoint (KP 10.188) 113° 59’ 53.232” E 1626986 ft N 495905.3328 mN
Dalam bab ini akan dijelaskan juga mengenai kondisi morfologi dan kondisi geologis dasar laut sepanjang koridor survei. Pengidentifikasian pipa bawah laut existing dan posisinya di dekat pantai (nearshore) didasarkan pada outputdata hasil rekaman side scan sonar dengan ketelitian sekitar ± 10 m.
3.1 Data-Data Survei Pendahuluan
Survei pendahuluan dilakukan dari mulai tanggal 3 November 2006 sampai dengan 18 November 2006.
3.1.1 Kondisi dan Konfigurasi Dasar Laut
Kedalaman air mulai dari 1 m di MCOT landing point (KP 10.080) sampai kedalaman 40 m di WLP-A platform. Pada saat MCOT landing point dalam keadaan surut atau kering, kedalaman air di sekitar WLP-A platform berkisar antara 29 – 30 m. Tidak dijumpai anomali kedalaman air yang signifikan sepanjang jalur rencana pipa bawah laut.
Semua data-data dari hasil proses sounding direduksi ke mean sea level (MSL) dengan menggunakan prediksi pasut Kuala Baram Port No.5146 (Royal Malaysia Navy Tide Table Volume 3, Tahun 2006) (prediksi pasut dapat dilihat pada lampiran III) dengan konstanta harmonik disajikan dalam tabel sebagai berikut :
Tabel 3.2 Konstanta harmonik prediksi pasut Kuala Baram Port 5146 (Royal Malaysia Navy Tide Table Volume 3, Tahun 2006) [Data survei pendahuluan, 2006]
Koreksi S.W
Zo (m) M2 S2 K1 O1 1/4 diurnal 1/6 diurnal
go H.m. go H.m. go H.m. go H.m. f
4 F4 f6 F6
27 3.1.2 Kondisi Morfologi Dasar Laut (Alam dan Buatan Manusia)
Untuk mengetahui kondisi, gambaran dan karakteristik morfologi dasar laut sepanjang koridor survei digunakan side scan sonar. Kualitas data yang didapatkan melalui side scan sonar sangat baik lalu dikaji sampai pada batas tertentu dengan range yang dipilih.
Data rekaman side scan sonar menggambarkan keadaan morfologi dasar laut mulai dari rendah sampai menengah yang diinterpretasikan melalui sonar reflectivity dengan jenis sedimen mulai dari clay yang sangat halus sampai silty clay. Secara umum, kondisi morfologi dasar laut diamati dalam area survei meliputi tingkat menengah sampai tingkat tinggi saat melalui existing platforms, existing pipelines, pipeline crossings, concrete sleepers atau mattresses, individual pockmarks, sonar contacts dan debris.
Kondisi morfologi dasar laut tersebut terbentuk secara alamiah dan buatan manusia. Kondisi morfologi dasar laut yang terbentuk secara alamiah tercermin dari bervariasinya tekstur dan kandungan objek dasar laut yang membentuk topografi dasar laut. Objek-objek buatan manusia yang juga membentuk morfologi dasar laut meliputi :
a. Concrete Sleepers dan Mattresses
Concrete sleepers dan mattresses diamati di nearshore didalam koridor survei. Objek buatan manusia ini berjarak sekitar 100 m dalam jalur rencana dan disajikan dalam tabel sebagai berikut :
Tabel 3.3 Concrete Sleepers dan Mattresses [Data survei pendahuluan, 2006]
Obyek
Dimensi
(Panjang x Luas x Tinggi*) Keterangan
1 30 x 15 x nmh Obyek buatan manusia (mattress?)
2 10 x 5 x nmh Concrete Sleeper
3 10 x 5 x nmh Concrete Sleeper
4 10 x 5 x nmh Concrete Sleeper
28 b. Existing Platforms
Ada tiga platform yang terkait dalam jalur pipa bawah laut rencana 18” dari WLP-A platform ke MCOT sepanjang koridor survei pipa laut yang akan dikonstruksi, meliputi :
□ WLP-A
□ WLDP-A
□ WLK-A
c. Existing Pipelines
Terdapat banyak existing pipelines di dalam koridor survei. Beberapa existing pipelines terpendam dalam minor sections dan tersingkap di dasar laut dengan jenis yang bervariasi, meliputi pipa-pipa gas dan pipa minyak bawah laut.
Berikut disajikan tabel pipa bawah laut existing yang sudah ada di sekitar jalur pipa bawah laut rencana :
Tabel 3.4 Pipa bawah laut existing [Data survei pendahuluan, 2006]
No Nama Pipa Bawah Laut Keterangan 1 *PL-005 16” OIL BK-P ke WLP-A Terpendam 2 *PL-285 6” GAS dari WLP-C Terpendam 3 *PL-286 8” GAS dari WLP-C Terpendam 4 *16” OIL BKP-A ke WLP-A Terpendam 5 *PL-217 6” GAS dari WL-123 Terpendam 6 *PL-216 6” GAS dari WL-123 Terpendam 7 *PL-221 6” OIL dari WL-123 Terpendam 8 *PL-227 10” VENT WLP-A ke WLV-A Terpendam 9 *PL-228 10” VENT WLP-A ke WLV-A Terpendam 10 *PL-229 10” VENT WLP-A ke WLV-A Terpendam 11 *6” GAS WLP-A ke WL-4 Terpendam 12 *PL-220 6” GAS WLP-A ke WL-4 Terpendam 13 PL-219 6” OIL WL-4 ke WLP-A Tersingkap sebagian 14 PL-230 10” OIL WLDP-C ke WLP-A Tersingkap sebagian 15 *PL-225 6” OIL dari MLDP-B Terpendam 16 *PL-224 6” OIL dari WLDP-B Terpendam 17 *PL-223 6” OIL dari WLDP-B Terpendam 18 *PL-222 6” OIL dari WLDP-B Terpendam 19 PL-233 18” OIL WLP-A ke MCOT Tersingkap sebagian 20 *PL-232 8” GAS WLP-A ke MCOT Terpendam
29
22 *6” OIL Terpendam
24 *12” OIL Terpendam
25 *12” OIL Terpendam
26 *6” OIL Terpendam
27 *12” OIL 2C 19630’ Terpendam & Sekali-kaliTersingkap 28 *12” OIL 2B 19212 Kemungkinan Bergeser
29 *12” OIL 1C 20700 Bergeser
30 Possible (104-12-GL-610-2C) Tersingkap sebagian 31 *12” WOIL 1B 20450 Terpendam
32 **8” MOGAS 1D 21700 Terpendam 33 Pipeline Tidak Teridentifikasi /Kabel laut Tersingkap sebagian
34 Pipeline Tidak Teridentifikasi/Kabel laut Tersingkap sebagian 35 Pipeline Tidak Teridentifikasi /Kabel laut Tersingkap sebagian 36 Pipeline Tidak Teridentifikasi /Kabel laut Tersingkap sebagian 37 Pipeline Tidak Teridentifikasi /Kabel laut Tersingkap sebagian 38 *12 LFO 3B 19065 Tersingkap sebagian
39 *6” GL 1A 18950 Terpendam
40 *12” OIL 4B 20085 Sekali-kali tersingkap & Terpendam
41 *12” OIL 4C 19890 Terpendam
42 97 – 12 – EL – 610 – 1C Kemungkinan Bergeser
d. Pipeline Crossings
Jalur pipa bawah laut rencana 18 ” Steel X60 dari WLP-A platform ke MCOT landing point dilalui 8 pipa bawah laut existing yang koordinatnya disajikan menurut tabel sebagai berikut :
Tabel 3.5 Koordinat-koordinat pipeline crossing [Data survei pendahuluan]
Koordinat Crossing (Datum Timbalai) Nama Pipa Bawah Laut Easting (ft) Northing (ft) KP
*10” OIL 1540454.510 1630648.800 0.758
*6” OIL 1550991.400 1628211.000 4.094
*12” OIL 1551458.090 1628123.680 4.239
*12” OIL 1551779.320 1628061.130 4.339
*6” OIL 1552057.200 1628008.670 4.425
*Pipa tidak teridentifikasi/kabel 1556613.960 1627144.740 5.839 *12” OIL 2C 19630’ 1562793.620 1626788.590 7.735 *12” OIL 2C 19630’ 1564625.480 1626833.560 8.292
3.1.3 Peta Jalur Pipa Bawah Laut Rencana (Proposed Pipeline)
Peta jalur pipa bawah laut rencana dibuat pada tahap survei pendahuluan dan berformat digital (.dwg), yang dibuat oleh TL Offshore Sdn Bhd (anak perusahaan SapuraCrest Petroleum Company).
30 3.2 Pelaksanaan Survei Konstruksi Pipa Bawah Laut
Dalam melakukan semua tahapan survei baik survei pendahuluan, survei konstruksi, maupun survei inspeksi, mengacu pada kerangka dasar geodetik yang telah ditetapkan pada spesifiksi teknis survei.
Tahap survei pendahuluan, survei konstruksi, dan survei inspeksi pipa bawah laut ini menggunakan datum lokal Timbalai yang mengacu pada spheroid everest 1830 (Mod) dengan sistem proyeksi Borneo Rectified Skew Orthomorphic (BRSO) yang mana pada saat melakukan aktivitas survei dan navigasi dilakukan transformasi datum ke dalam datum global WGS ’84. Tabel berikut menjelaskan parameter-parameter kerangka dasar geodetik yang digunakan dalam melakukan aktivitas survei dan navigasi :
Tabel 3.6 Parameter geodetik West Lutong and Kuala Baram Pipeline Replacement Project
[Data proyek, 2006] Datum Satelit GPS (WGS ’84) Spheroid WGS 84 Datum WGS 84 Semi-major axis 6 378 137.000 m Semi-minor axis 6 356 752.314 m Inverse flattening 298.257 223 563 Eccentricity Squared (e2) 0.006 694 379 990 13 Datum Lokal
Spheroid Everest 1830 (Mod)
Datum Timbalai
Semi-major axis (a) 20 922 931.8 Imp. ft (6 377 298.561 m) Semi-minor axis (b) 20 853 374.6 Imp. ft (6 356 097.554 m)
Inverse flattening 300.8017
Eccentricity Squared (e2) 0.006 637 846 630 2 Sistem Proyeksi
Borneo Rectified Skew Orthomorphic (BRSO) Latitude of Origin 04° 00’ 00” N Longtitude of Origin 115° 00’ 00” E Bearing of initial Line (Alpha) 53° 18’ 56.9537” N Skew to Rectified (Gamma) 53° 07’ 48.3685” N Basic Longtitude (Omega) 109° 41’ 07.8727” E Scale Factor at Origin 0.99984
False Easting at Origin 1 937 263.436 Imp. Ft False Northing at Origin 1 452 947.575 Imp. Ft Unit of Measurement Imperial feet
(Imp. feet conversion to metres = 0.304 799 471 8; Metres conversion to Imp. feet = 3.280 845 581)
31 Datum Shift from WGS 84 to Timbalai Datum
DX + (plus) 533.4 m DY - (minus) 669.2 m DZ + (plus) 52.5 m r(X) 0.00 s r(Y) 0.00 s r(Z) + (plus) 4.28 s
Scale Factor - (minus) 9.4 ppm
3.2.1 Penentuan Bench Mark (BM)
Dalam mendapatkan data koordinat bench mark (BM) sebagai titik kontrol pekerjaan survei konstruksi yang diberi identifikasi titik 0212, dilakukan pengolahan data GPS secara post-processing (minimum tiga jam) dan selanjutnya data rinex yang didapat tersebut diolah lebih lanjut untuk mendapatkan data koordinat fix dengan mengikatkannya terhadap stasiun-stasiun International Geodetic System (IGS). Stasiun-stasiun titik kontrol IGS referensi yang digunakan adalah yang terdekat dengan titik 0212 yang akan ditentukan nilainya, dapat dilihat menurut gambar berikut :
32 Pengolahan data pengukuran dilakukan secara post-processing dengan pengambilan data selama 4 jam (static absolut positioning) menurut data sebagai berikut :
Tabel 3.7 Data tinggi antena dan lama pengukuran GPS
User File Tipe Antena
Tinggi
Antena (m) Start Time End Time
021206jt.06o Default (none) 1.31 12/2/2006 (5:56) 12/2/2006 (9:59)
Dengan mengacu pada ITRF2000 dan ellipsoid GRS80 dengan menggunakan titik kontrol stasiun-stasiun IGS Bakosurtanal (Indonesia), pimo (Filipina), dan tnml (Taiwan) maka didapatkan koordinat fix titik 0212 dengan hasil disajikan menurut tabel 3.8 dan 3.9 sebagai berikut :
Tabel 3.8 Titik kontrol stasiun IGS [AUSPOS, 2006]
Tanggal Data IGS User Data Tipe Orbit
2006-12-02 pimo bako tnml 0212 IGS Rapid
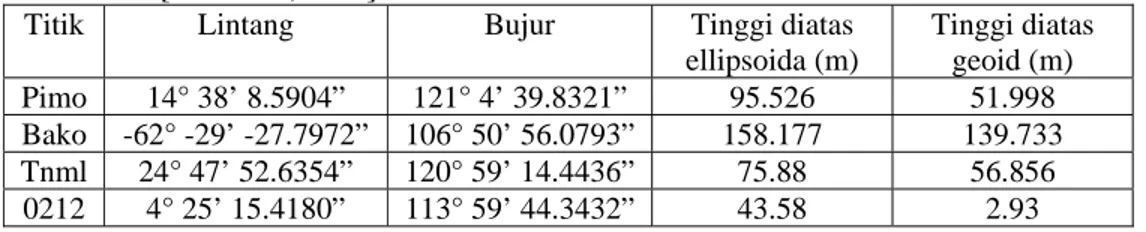
Tabel 3.9 Koordinat geodetik (BM0212) dan titik-titik kontrol IGS hasil post processing [AUSPOS, 2006]
Titik Lintang Bujur Tinggi diatas
ellipsoida (m) Tinggi diatas geoid (m) Pimo 14° 38’ 8.5904” 121° 4’ 39.8321” 95.526 51.998 Bako -62° -29’ -27.7972” 106° 50’ 56.0793” 158.177 139.733 Tnml 24° 47’ 52.6354” 120° 59’ 14.4436” 75.88 56.856 0212 4° 25’ 15.4180” 113° 59’ 44.3432” 43.58 2.93
Jika tabel 3.9 di atas dikonversi dari sistem koordinat geodetik ke kartesian maka hasilnya adalah sebagai berikut :
Tabel 3.10 Koordinat kartesian (BM0212) dan titik-titik kontrol IGS hasil post processing [AUSPOS, 2006] Titik X (m) Y (m) Z (m) ITRF 2000 Pimo -3186293.858 5286624.25 1601158.271 12/2/2006 Bako -1836969.179 6065617.103 -716257.85 12/2/2006 Tnml -2982779.184 4966662.625 2658805.682 12/2/2006 0212 -2586131.401 5809733.026 488371.431 12/2/2006
Tinggi di atas geoid (tinggi orthometrik) dihitung diatas bidang ellipsoida (tinggi geodetik) dan dikoreksi dengan undulasi geoid. Tinggi geoid dalam hal ini dihitung dengan menggunakan persamaan harmonik bola dari geoid EGM96.
33 3.2.2 Persiapan dan Instalasi Peralatan Survei dan Navigasi
Inventarisasi peralatan survei dan navigasi dilakukan sebelum mobilisasi laying vessel menuju ke titik awal lokasi jalur pipa bawah laut yaitu pada saat Mariam 281 laying barge berada di jetty. Inventarisasi dilakukan dengan memberi identitas (penomoran) pada masing-masing box sesuai peruntukannya untuk mempermudah pengambilan peralatan yang dibutuhkan pada saat berlangsungnya survei konstruksi.
Setelah dilakukan penomoran peralatan, maka mulai dilakukan instalasi peralatan survei dan navigasi di base station, Mariam 281 barge, AHT boat, dan di survey boat. Pada proses instalasi peralatan survei dan navigasi, tahap pertama dilakukan dengan penggambaran model Mariam 281 barge, AHT boat dan beacon/pinger kedalam perangkat lunak HYDROpro menggunakan vessel editor. Berikut gambar hasil instalasi peralatan survei dan navigsi di Mariam 281 barge dan di AHT boat :
Gambar 3.3 Koneksi sistem navigasi di Mariam281 barge dan AHT boat [Dokumentasi proyek, 2007]
Setelah instalasi peralatan survei dan navigasi selesai, lalu dilakukan proses koneksi (interface) antara peralatan survei dan navigasi ke perangkat lunak masing-masing dengan pusat koneksi perangkat lunak Trimble HYDROpro construction.
Untuk mempermudah dalam pemantauan pergerakan Mariam barge pada HYDROpro, pertama dilakukan offset bentuk dan ukuran Mariam barge sebenarnya dalam sistem koordinat lokal terhadap distribusi peralatan survei dan navigasi yang dipasang di Mariam barge dengan titik pusat di Origin (0,0). Posisi TDP pada kondisi sebenarnya di lapangan bergantung pada kedalaman laut dan slope dari stinger. Jika kedalaman laut dan slope dari stinger diketahui, maka kita bisa memperkirakan
34 panjang pipa antara stingerdan TDP dengan menggunakan fungsi sinus, cosinus, dan tangent.
Ukuran offset Mariam barge didapatkan melalui gambar model Mariam barge berformat (.dwg) yang sudah dibuat sebelumnya. Sedangkan offset posisi/letak antena, station-1, stern, tranceiver, tranducer echosounder, dan TDP diukur dengan menggunakan meteran maupun secara digital dengan menggunakan Trimble HD 150 laser pocket.
Setelah data-data offset didapatkan kemudian dilakukan interface peralatan survei dan navigasi kedalam perangkat lunak HYDROpro construction. Setelah semua peralatan survei dan navigasi dihubungkan pada masing-masing serial port (tersedia 8 port) pada komputer utama (primary computer) dan kedua (secondary computer) maka akan dilakukan pengetesan format output data dan pengesetan alat pada perangkat lunak HYDROpro.
3.2.3 Operasionalisasi Peralatan Survei dan Navigasi
Sistem navigasi yang digunakan dalam survei konstruksi pipa bawah laut ini adalah metode diferensial dan dibandingkan dengan metode real-time kinematik (RTK) yang digunakan bersamaan secara real-time. Peralatan navigasi yang digunakan di base station yaitu GPS Trimble 4000Ssi yang diintegrasikan dengan radio PDL untuk memberikan koreksi ke segmen rover di laying vessel, sedangkan peralatan yang digunakan sebagai rover adalah receiver Trimble AgGPS 132 yang dikombinasikan dengan radio EDL untuk menerima koreksi dari base station dan GPS Trimble 4000 Ssi yang diset sebagai rover (pada komputer kedua) serta GPS Trimble 5700 RTK sebagai pembanding ketelitian posisi. Seluruh peralatan navigasi terkoneksi ke komputer dan dioperasikan melalui perangkat lunak navigasi Trimble HYDROpro construction.
Dengan ketelitian posisi sekitar 1 – 5 m, metode diferensial akan mampu memenuhi spesifikasi teknis ketelitian posisi yang diinginkan karena selain sinyal yang diterima receiver AgGPS 132 bersifat kontinu juga stabil pada jarak baseline maksimum 20 km, sedangkan metode real-time kinematik (RTK) dari receiver Trimble 5700 RTK dengan ketelitian posisi sekitar 1 – 5 cm, akan mampu mengoreksi sistem diferensial
35 pada jarak baseline maksimum 10 km. Kestabilan sinyal yang diterima receiver akan sangat bergantung pada frekuensi radio transmisi yang digunakan.
Skema berikut menjelaskan sistem navigasi di base station :
Gambar 3.4 Skema sistem navigasi di base station [Data proyek, 2007]
Pada segmen rover yang mana dalam hal ini adalah sistem navigasi di Mariam 281 barge menggunakan metode penentuan posisi secara diferensial yang menerima koreksi (ΔR1, ΔR2, ΔR3, ΔR4) dari base station melalui transmisi radio. Skema berikut
menjelaskan mengenai sistem navigasi pada komputer utamadi Mariam 281 barge :
36 Pada sistem navigasi bandingan (komputer kedua), sistem navigasi yang digunakan memakai sistem RTK sebagai pembanding ketelitian posisi terhadap sistem navigasi utama. Skema berikut menjelaskan sistem navigasi kedua di Mariam barge :
Computer Navigation (Secondary) HYDROpro Construction Software 8 serial port available
4000 Ssi GPS Receiver RTCM, RTK Output Currentmeter NMEA Output Tritech Tranducer NMEA Output Gyro Compass NMEA Output text Zephyr Geodetic Antenna
Primary Position Primary Heading Ba se St a ti o n Co rre c ti o n V ia Channel -0 1
Power Tall Required : - UPS Power Supply (2 Unit) - 12 Volt DC Power Supply (2 Unit) - 24 Volt DC Power Supply (2 Unit) - Power Regulator (1 Unit)
Radio Antenna
Gambar 3.6 Skema sistem navigasi kedua di Mariam 281 lay barge [Data proyek, 2007]
Pada dasarnya, sistem navigasi di AHT boat mirip dengan sistem navigasi di Mariam barge pada komputer utama, disajikan menurut skema berikut :
Computer Navigation HYDROpro AHT Software With minimum 2 serial port
KVH Fluxgate Compass AgGPS 132 Receiver RTCM Output
NMEA HDT String
Receive from Channel - 01
Co m m u n ic at io n L ink From AHT to Ba rge Vi a Ch an ne l -0 4
Power Tall Required : - Power Regulator (1 Unit) - UPS Power Supply (1 Unit) - 12 Volt DC Power Supply (2 Unit) NMEA
GGA String Format
Radio Antenna
Radio Antenna
37 Sistem navigasi yang digunakan di survey boat adalah real-time kinematik dengan menggunakan receiver GPS Trimble 5700 RTK, skemanya dapat dilihat pada gambar sebagai berikut :
Gambar 3.8 Skema sistem navigasi di Surveyboat [Data proyek, 2007]
1. Proses Navigasi Pada Saat Proses Peletakan Pipa Bawah Laut
Dalam proses peletakan pipa bawah laut maupun anchor handling, instruksi akan diberikan dengan membuat target (target barge maupun target anchor intended) pada perangkat lunak HYDROpro dan akan ditangkap pula pada tampilan perangkat lunak HYDROpro pada AHT boat.
Pada saat proses peletakan pipa bawah laut di dasar laut diperlukan instalasiperangkat lunak HYDROpro agar mampu bersinergi dengan peralatan survei dan navigasi yang digunakan, berikut dijelaskan proses navigasi selama proses peletakan pipa bawah laut di dasar laut :
a. Pembuatan Target Barge (Rig)
Pertama surveyor membuat target barge/rig (direpresentasikan dengan warna biru) dengan jarak 12 meter (1-joint pipa) kearah bow (depan barge) dari kedudukan aktual saat itu (direpresentasikan dengan warna hitam) untuk memandu winch operator dalam mereposisikan barge ke target yang telah ditentukan. Gambar berikut
38 menunjukkan proses pergerakan Mariam barge dalam mereposisikan terhadap target rig yang telah ditentukan beserta offline-nya terhadap jalur pipa bawah laut rencana :
Gambar 3.9 Offline Mariam barge terhadap jalur pipa bawah laut rencana [Data proyek konstruksi pipa bawah laut, 2007]
b. Analisis Jalur Barge (Rig) Terhadap Jalur Pipa Bawah Laut Rencana Analisis jalur barge (rig) terhadap jalur pipa bawah laut rencana dilakukan setelah selesainya proses penyambungan pipa pada setiap stasiun Mariam barge, peletakannya di dasar laut dan pemanduan pergerakan barge menuju target rig yang telah ditentukan. Setelah barge sesaat bergerak dan kedudukan barge berada mendekati target rig yang telah ditentukan, maka surveyor akan menganalisis apakah barge telah benar-benar berada pada target yang telah ditentukan dengan acuan toleransi terhadap jalur pipa bawah laut rencana (offline). Pada gambar diatas diketahui bahwa offline Mariam barge pada station-1 adalah -1.97 m, pada stern -1.17 m, dan pada TDP +0.10 m terhadap jalur pipa bawah laut rencana. Warna merah pada offline menunjukkan bahwa kedudukan barge menyimpang ke arah kiri terhadap jalur pipa bawah laut rencana dan warna hijau pada offline menunjukkan bahwa kedudukan barge menyimpang ke arah kanan terhadap jalur pipa bawah laut rencana. Selain itu, surveyor juga akan menganalisis optimasi panjang anchor wire selama barge mendekati target yang telah ditentukan (barge moving).
39 Gambar berikut merupakan tampilan HYDROpro pada komputer utama pada saat peletakan pipa bawah laut di dasar laut :
Gambar 3.10 Tampilan pada komputer utamapada saat peletakan pipa bawah laut [Data proyek konstruksi pipa bawah laut, 2007]
2. Proses Navigasi Pada Saat Anchor Handling
Proses navigasi dilakukan secara sinergi antara sistem navigasi di Mariam 281 laying barge dengan di AHT boat. Koordinat anchor intended yang diberikan oleh Mariam 281 lay barge akan diterima oleh AHT boat pada tampilan perangkat lunak HYDROpro remote (anchor handling). Target akan ditentukan di Mariam barge dengan koordinat anchor intended tertentu sesuai dengan koordinat skenario anchor handling. Pada gambar menunjukkan sedang dilakukan anchor handling jangkar Mariam barge nomor 4 oleh MV Dalini tug boat. Setelah target ditentukan oleh Mariam (x mE, y mN), maka AHT boat akan menuju target tersebut untuk mendrop (deploy) jangkar tepat di target. Berikut merupakan tampilan perangkat lunak HYDROpro pada monitor utama pada saat anchor handling dengan bantuan AHT boat :
40
Gambar 3.11 Tampilan HYDROpro construction di Mariam 281 barge
Maka pada display perangkat lunak HYDROpro di AHT boat akan menangkap perintah dengan berkedap-kedipnya button F7 sebagai tanda agar kapten kapal AHT boat segera menekan F7 tersebut setelah jangkar yang dibawa AHT boat yang bersangkutan telah di-drop sesuai target yang diberikan. Sebelum proses anchor deploy dilakukan, terlebih dahulu surveyor akan menganalisis apakah jangkar tersebut layak untuk di-drop pada zona aman (penempatan jangkar terhadap pipa-pipa bawah laut existing berjarak minimum 200 m pada crowded area dan 300 m pada zona open
sea) dengan memantau tug offline display
akan didapatkan koordinat aktual (x,y) jangkar (anchor deployed) yang relatif mendekati koordinat target jangkar (anchor intended) yang diberikan oleh surveyor di Mariam barge. Jika terjadi kesalahan pemberian target intended oleh surveyor di Mariam barge, maka dengan menekan button F12 (clear instruction) maka target yang telah diberikan tersebut secara otomatis akan non-aktif kembali dan selanjutnya surveyor yang berada di Mariam barge akan memberikan koordinat target intended yang benar sesuai dengan skenario koordinat anchor handling. Berikut merupakan tampilan HYDROpro remote (anchor handling) pada sistem komputer tug boat :
41
Gambar 3.12 Tampilan HYDROpro remote pada AHT boat
3.3 Pengolahan Data Survei Konstruksi
Data yang diolah meliputi data-data TDP hasil record dari pergerakan barge yang disajikan dalam bentuk peta distribusi jalur pipa bawah laut aktual, data-data tracking beacon, data pergerakan arus, dan data penentuan posisi bawah laut secara akustik.
3.3.1 Jalur Pipa Bawah Laut Aktual Berdasarkan Pergerakan Barge (Barge Track)
Dalam hal ini akan dihasilkan distribusi jalur pipa bawah laut yang telah terpasang (actual pipeline) berdasarkan pergerakan barge dengan asumsi bahwa koordinat laying pipe merupakan koordinat titik touchdown point (TDP) yang masih bersifat prediktif, karena pada kondisi sebenarnya di lapangan offset kedudukan titik TDP tersebut akan berubah-ubah (dinamis) berbanding lurus dengan perubahan kedalaman laut dan perubahan kemiringan stinger terhadap permukaan laut (MSL) menurut persamaan (7) pada dasar teori (Bab II).
Gambar 3.13 Distribusi jalur pipa bawah laut aktual dari KP 0.0 – 10.194
Tabel 3.11 Segmen jalur pipa bawah laut aktual dari KP 0.0 – 10.194
Kilometre Post (KP) Jumlah Segmen
KP 1.0 - KP 0.0 80 KP 2.0 - KP 1.0 82 KP 3.0 - KP 2.0 81 KP 4.0 - KP 3.0 81 KP 5.0 - KP 4.0 79 KP 6.0 - KP 5.0 159 KP 7.0 - KP 6.0 82 KP 8.0 - KP 7.0 79 KP 9.0 - KP 8.0 81 KP 10 - KP 9.0 80 KP 10.194 - KP 10 15
Identifikasi X Y Z+ve up Origin 0.000 0.000 0.000 GPS 1 -12.350 -38.880 12.000 GPS 2 -12.350 17.790 10.000 Jangkar 1 -11.120 43.850 0.000 Jangkar 2 10.520 43.850 0.000 Jangkar 3 -14.970 39.580 0.000 Jangkar 4 14.970 38.080 0.000 Jangkar 5 -14.970 -39.410 0.000 Jangkar 6 14.970 -39.410 0.000 Jangkar 7 -11.120 -43.850 0.000 Jangkar 8 12.490 -43.850 0.000 Outriger 9.480 -57.580 0.000 Station - 1 9.480 25.370 0.000 TDP 9.480 -139.000 0.000 Stinger 9.480 -81.800 0.000 Davit - 6 15.080 -37.980 0.000 Davit - 5 15.080 -20.270 0.000 Stern 9.480 -42.580 0.000 Davit - 3 15.080 6.810 0.000 Davit - 2 15.080 25.410 0.000 Davit - 1 15.080 41.090 0.000 Davit - 4 15.080 -5.400 0.000 GPS RTK -12.350 -9.330 13.000 Tritech Tranducer 7.580 -42.580 0.000 USBL Tranceiver -3.620 -42.580 0.000 Vessel Offsets
![Gambar 3.1 Jalur pipa bawah laut rencana (jalur MCOT – WLPA Platform berwarna merah pada peta) [ www.googleearth.com , 2007]](https://thumb-ap.123doks.com/thumbv2/123dok/2320274.2191388/1.918.167.755.731.1039/gambar-jalur-rencana-jalur-mcot-platform-berwarna-googleearth.webp)
![Tabel 3.1 Koordinat-koordinat jalur pipa bawah laut rencana [Data survei pendahuluan, 2006]](https://thumb-ap.123doks.com/thumbv2/123dok/2320274.2191388/2.918.178.746.205.329/tabel-koordinat-koordinat-jalur-bawah-rencana-survei-pendahuluan.webp)
![Tabel 3.3 Concrete Sleepers dan Mattresses [Data survei pendahuluan, 2006]](https://thumb-ap.123doks.com/thumbv2/123dok/2320274.2191388/3.918.170.746.872.1026/tabel-concrete-sleepers-dan-mattresses-data-survei-pendahuluan.webp)
![Tabel 3.4 Pipa bawah laut existing [Data survei pendahuluan, 2006]](https://thumb-ap.123doks.com/thumbv2/123dok/2320274.2191388/4.918.215.706.588.1083/tabel-pipa-bawah-laut-existing-data-survei-pendahuluan.webp)
![Tabel 3.5 Koordinat-koordinat pipeline crossing [Data survei pendahuluan]](https://thumb-ap.123doks.com/thumbv2/123dok/2320274.2191388/5.918.212.709.96.501/tabel-koordinat-koordinat-pipeline-crossing-data-survei-pendahuluan.webp)
![Tabel 3.6 Parameter geodetik West Lutong and Kuala Baram Pipeline Replacement Project [Data proyek, 2006] Datum Satelit GPS (WGS ’84) Spheroid WGS 84 Datum WGS 84 Semi-major axis 6 378 137.000 m Semi-minor axis 6 356 752.314 m Inverse flattening 298.257 223 563 Eccentricity Squared (e 2 ) 0.006 694 379 990 13 Datum Lokal](https://thumb-ap.123doks.com/thumbv2/123dok/2320274.2191388/6.918.177.750.508.1061/parameter-geodetik-pipeline-replacement-spheroid-flattening-eccentricity-squared.webp)
![Gambar 3.2 Stasiun–stasiun titik kontrol IGS referensi [AUSPOS, 2006]](https://thumb-ap.123doks.com/thumbv2/123dok/2320274.2191388/7.918.162.754.100.265/gambar-stasiun-stasiun-titik-kontrol-igs-referensi-auspos.webp)
![Gambar 3.3 Koneksi sistem navigasi di Mariam 281 barge dan AHT boat [Dokumentasi proyek, 2007]](https://thumb-ap.123doks.com/thumbv2/123dok/2320274.2191388/9.918.169.754.484.701/gambar-koneksi-sistem-navigasi-mariam-barge-dokumentasi-proyek.webp)
![Gambar 3.5 Skema sistem navigasi utama di Mariam 281 lay barge [Data proyek, 2007]](https://thumb-ap.123doks.com/thumbv2/123dok/2320274.2191388/11.918.272.645.639.1072/gambar-skema-sistem-navigasi-utama-mariam-barge-proyek.webp)
