i
ROBOT LENGAN OTOMATIS SEBAGAI
PEMISAH BARANG BERDASARKAN
WARNA DENGAN MENGGUNAKAN
ATMEGA8535
Diajukan Untuk Memenuhi Salah Satu Syarat Memperoleh Gelar Sarjana Teknik
Program Studi Teknik Elektro
Oleh :
Rio Arismarjito
NIM : 065114011
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
ii
AUTOMATIC ROBOT ARM AS
SEPARATOR OBJECT BASED ON COLOR
USING ATMEGA8535
Presented as Partial Fulfillment of the Requirements To Obtain the Sarjana Teknik Degree In Electrical Engineering Study Program
Rio Arismarjito
NIM : 065114011
ELECTRICAL ENGINEERING STUDY PROGRAM
SCIENCE AND TECHNOLOGY FACULTY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
iii
TUGAS AKHIR
ROBOT LENGAN OTOMATIS SEBAGAI PEMISAH
BARANG BERDASARKAN WARNA DENGAN
MENGGUNAKAN ATMEGA8535
(AUTOMATIC ROBOT ARM AS SEPARATOR
OBJECT BASED ON COLOR USING ATMEGA8535)
Oleh : Rio Arismarjito NIM : 065114011
Telah disetujui oleh:
Pembimbing,
iv
TUGAS AKHIR
ROBOT LENGAN OTOMATIS SEBAGAI PEMISAH BARANG
BERDASARKAN WARNA DENGAN MENGGUNAKAN ATMEGA8535
(AUTOMATIC ROBOT ARM AS SEPARATOR OBJECT BASED ON
COLOR USING ATMEGA8535)
Oleh :
Rio Arismarjito NIM : 065114011
Telah dipertahankan di depan panitia penguji pada tanggal: 21 Juni 2011 dan dinyatakan memenuhi syarat
susunan panitia
Nama lengkap Tanda Tangan
Ketua : B. Wuri Harini, S.T.,M.T.
Sekertaris : Martanto, S.T.,M.T.
Anggota : Petrus Setyo Prabowo, S.T.,M.T.
v
“Saya menyatakan dengan sesungguhnya bahwa tugas akhir ini tidak memuat karya atau
bagian orang lain, kecuali yang telah disebutkan dalam kutipan dan daftar pustaka,
sebagaimana layaknya karya ilmiah”
Yogyakarta, 6 Juni 2011
vi
Karya tulis ini kupersembahkan untuk :
Yesus Kristus Gembalaku
Bunda Maria dan Malaikat pelindungku…
Bapak dan Ibu tercinta, untuk doanya, serta
dukungannya secara moral maupun materi
Almamaterku Teknik Elektro Universitas Sanata
Dharma
“Tak ada kata terlambat,
vii
PUBLIKASI KARYA ILMIAH UNTUK KEPENTINGAN
AKADEMIS
Yang bertandatangan di bawah ini, saya mahasiswa Universitas Sanata Dharma :
Nama : Rio Arismarjito
Nomor Mahasiswa : 065114011
Demi pengembangan ilmu pengetahuan, saya memberikan kepada Perpustakaan Universitas Sanata Dharma karya ilmiah saya yang berjudul :
ROBOT LENGAN OTOMATIS SEBAGAI PEMISAH BARANG
BERDASARKAN WARNA DENGAN MENGGUNAKAN
ATMEGA8535
beserta perangkat yang diperlukan (bila ada). Dengan demikian saya memberikan kepada Perpustakaan Universitas Sanata Dharma hak untuk menyimpan, mengalihkan dalam bentuk media lain, mengelolanya dalam bentuk pangkalan data, mendistribusikan secara terbatas, dan mempublikasikannya di internet atau media lain untuk kepentingan akademis tanpa perlu meminta ijin dari saya maupun memberikan royalti kepada saya selama tetap mencantumkan nama saya sebagai penulis.
Demikian pernyataan ini yang saya buat dengan sebenarnya.
Yogyakarta, 6 Juni 2011
viii
Dalam dunia teknologi maupun kehidupan manusia sehari-hari, penggunaan robot saat ini sangat membantu dalam menyelesaikan tugas atau pekerjaan yang tidak bisa dilakukan oleh manusia. Kelebihan yang dimiliki robot memudahkan manusia dalam menyelesaikan pekerjaan. Oleh karena itu, agar dapat membantu manusia, robot lengan sebagai pemisah barang dibuat dengan tujuan untuk menghemat waktu dalam menyelesaikan pekerjaan dalam mengambil dan memindahkan barang, mendapatkan hasil akhir yang berkualitas, mengurangi resiko yang dapat membahayakan manusia.
Robot lengan otomatis sebagai pemisah barang berdasarkan warna menggunakan ATmega8535 terdiri dari sistim minimum yang berfungsi mengontrol pergerakan motor servo sebagai aktuator robot lengan dan mengolah data yang dihasilkan oleh sensor TCS3200 sebagai pengidentifikasi warna objek. Warna objek yang dideteksi ditampilkan dalam penampil LCD, jika warna merah, biru atau hijau maka akan tampil nilai R G B warna tersebut dan warna objek.
Robot lengan otomatis sebagai pemisah barang berdasarkan warna menggunakan ATmega8535 sudah berhasil dibuat dan dapat bekerja dengan baik. Sensor dapat membedakan warna tiap objek yaitu merah, biru dan hijau. Robot lengan mampu mengambil dan memindahkan objek berwarna yang telah diindentifikasi oleh sensor TCS3200 ke dalam wadah penampung sesuai dengan warna objek tersebut.
ix
In the world of technology and daily human life, the use of robots is very helpful in completing tasks or jobs that can’t be done by humans. Advantages of robot is to easy human in completing the work. Therefore, in order to help humans, the robot arm as separator items was created in order to save time in completing the work in taking and moving items, get a quality end result, and reducing the risks that could harm humans.
Automatic robot arm as separator items based on color using the ATmega8535 consist of a minimum system which controls the movement of the servo motor as the actuator arm robot and process data generated by sensors TCS3200 as the identifiers color of an object. The color of the detected object is displayed in the LCD viewer, if the colors red, blue or green it will show the RGB color value and color of the object.
Automatic robot arm as separator items based on color using the ATmega8535 has been successfully established and can work well. The sensor can distinguish the color of each object that is red, blue and green. The robot arm can pick up and move colored objects that have been identified by the sensor into the container receptacle TCS3200 matches the color of the object.
x
Puji dan syukur penulis haturkan pada Tuhan Yesus Kristus, karena atas rahmat dan karunia Nya penulis dapat menyelesaikan tugas akhir ini yang berjudul “Robot Lengan Otomatis Sebagai Pemisah Barang Berdasarkan Warna Dengan Menggunakan ATmega8535”. Penulis menyadari mulai dari proses perancangan, pengujian alat dan proses penyusunan skripsi ini tidak dapat lepas dari bantuan, dorongan, dan bimbingan berbagai pihak. Oleh karena itu dengan segala kerendahan hati, penulis mengucapkan terima kasih kepada :
1. Kedua orang tua tercinta dan adik-adikku, terimakasih atas perhatian, dukungan dan kesabaran dalam mendidik penulis.
2. Bapak Yosef Agung Cahyanta, S.T., M.T. selaku Dekan Fakultas Sains dan Teknologi Universitas Sanata Dharma Yogyakarta.
3. Bapak Martanto , S.T., M.Eng., selaku dosen pembimbing yang menyumbangkan pemikiran, ide, tenaga dan memberikan saran serta kritik yang membantu dalam menyelesaikan tugas akhir ini dari awal hingga selesai.
4. Seluruh dosen dan laboran teknik elektro yang memberikan ilmu dan membantu selama perkuliahan.
5. Rocha Ifahyana Siagian, terimakasih atas dukungan dan motivasinya.
6. Teman-teman teknik elektro angkatan 2006 dan sahabat SMAku terimakasih atas bantuannya.
Penulis menyadari bahwa dalam penulisan tugas akhir ini masih banyak kekurangan, kelemahan dan jauh dari sempurna. Oleh karena itu dengan segenap kerendahan hati, penulis mengharapkan kritik dan saran yang membangun untuk penyempurnaan tugas akhir ini.
terimakasih.
Yogyakarta, 6 Juni 2011
xi
HALAMAN JUDUL... i
HALAMAN PERSETUJUAN...iii
HALAMAN PENGESAHAN... iv
LEMBAR KEASLIAN KARYA... v
HALAMAN PERSEMBAHAN... vi
LEMBAR PERNYATAAN PERSETUJUAN PUBLIKASI KARYA ILMIAH UNTUK KEPENTINGAN AKADEMIS...vii
INTISARI ...viii
ABSTRACT ... ix
KATA PENGANTAR... x
DAFTAR ISI ... xi
DAFTAR GAMBAR... xiv
DAFTAR TABEL...xviii
BAB I. PENDAHULUAN
1.1 Latar Belakang... 11.2 Tujuan dan Manfaat... 2
1.3 Batasan Masalah ... 2
1.4 Metodologi Penelitian... 2
1.5 Sistematika Penulisan ... 4
BAB II. DASAR TEORI
2.1 Mikrokontroler AVR Atmega8535 ... 5xii
2.2.3 Organisasi Memori AVR Atmega8535... 7
2.2.3.1 Program Memori... 7
2.2.3.2 Data Memori... 7
2.2.4 Interupsi ... 7
2.2.5 Timer/Counter... 8
2.2.5.1 Timer/Counter0... 8
2.2 LCD (Liquid Crystal Display) ... 10
2.3 Robot Lengan ... 12
2.4 Gripper ... 14
2.5 Sensor TCS3200 ... 15
2.6 Motor Servo... 17
2.6.1 Torsi/Momen Gaya ... 19
2.7 Regulator Tegangan IC 7805 dan IC 7806 ... 19
BAB III. PERANCANGAN PENELITIAN
3.1 Proses Kerja dan Mekanisme Gerak Robot Lengan... 223.2 Perancangan Mekanik Robot Lengan... 24
3.3 Perancangan Perangkat Keras ... 29
3.3.1 Arsitektur AVR Atmega8535 ... 30
3.3.2 Rangkaian Konfigurasi LCD 16x2 ... 32
3.3.3 Perancangan Sensor TCS3200 ... 33
3.3.4 Motor Servo ... 34
xiii
3.4.1 Program Pengaturan Awal Posisi Robot ... 44
3.4.2 Program Indentifikasi Warna Objek menggunakan Sensor TCS3200. 45 3.4.3 Program Pengendali Sudut Putar Motor Servo dalam Pengambilan dan. Peletakan Objek...47
BAB III. HASIL PENGAMATAN DAN PEMBAHASAN
4.1 Betuk Fisik dan Sistem Kerja Robot Lengan ... 514.2 Hasil Data Pengujian dan Pembahasan ... 53
4.2.1 Pengujian Sensor TCS3200 ... 53
4.2.2 Pengujian Jarak Jangkauan Sensor TCS3200 ... 56
4.2.3 Pengujian Arus pada Motor Servo ... 59
4.2.4 Pengamatan Pergerakan Motor Servo sebagai Aktuator Robot Lengan...60
4.3 Analisa dan Pembahasan Perangkat Lunak ... 63
4.3.1 Pengendali Motor Servo... 63
4.3.2 Identifikasi Warna Sensor TCS3200... 68
4.4 Analisa Keberhasilan Alat ... 72
Kesimpulan dan Saran... 76
Daftar Pustaka ... 77
xiv
Halaman
Gambar 1.1 Diagram Blok Sistem ... 3
Gambar 2.1 Konfigurasi Pin Mikrokontroller ATmega8535 ... 6
Gambar 2.2 Mode Phase CorrectPWM... 9
Gambar 2.3 Mode Fast PWM ... 10
Gambar 2.4 Baris dan Kolom Karakter pada LCD 16x2... 10
Gambar 2.5 Konfigurasi kaki LCD 16x2... 11
Gambar 2.6 Anatomi Robot Lengan ... 12
Gambar 2.7 Sistem Robot Lengan ... 13
Gambar 2.8 Jenis GripperMekanik... 14
Gambar 2.9 Konfigurasi pin dan Blok Fungsional TCS3200... 15
Gambar 2.10 Sample Warna dan Komposisi RGB ... 16
Gambar 2.11 Motor Servo ... 17
Gambar 2.12 Konfigurasi Pin Motor Servo ... 17
Gambar 2.13 Sinyal untuk Mengendalikan Motor Servo ... 18
Gambar 2.14 Lebar Pulsa dan Posisi Servo ... 18
Gambar 2.15 Penyearah Gelombang Penuh ... 20
Gambar 2.16 IC Regulator ... 20
Gambar 3.1 Diagram Blok Sistem Robot Lengan ... 22
Gambar 3.2 Keseluruhan Sistem Robot Lengan... 23
Gambar 3.3 Model Anatomi Robot Lengan ... 24
xv
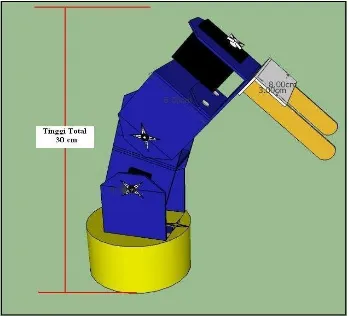
Gambar 3.6 Robot Lengan Komponen 3 dan 4 ... 26
Gambar 3.7 Tinggi Total Robot Lengan... 26
Gambar 3.8 Posisi Penempatan Barang ... 27
Gambar 3.9 Sketsa Robot Lengan Komponen 1 dan Komponen 3 ... 27
Gambar 3.10 Sketsa Robot Lengan Komponen 2 , Komponen 4 dan Poros ... 28
Gambar 3.11 Gripper... 28
Gambar 3.12 Jarak Robot Lengan dengan Objek dan Wadahnya ... 29
Gambar 3.13 Rangkaian Osilator ATmega8535... 30
Gambar 3.14 Rangkaian Reset ATmega8535... 30
Gambar 3.15 Rangkaian Sistem Minimum ATmega8535... 32
Gambar 3.16 Rangkaian LCD 16x2... 33
Gambar 3.17 Pengaturan PortLCD pada Code Vision AVR... 33
Gambar 3.18 Rangkaian Sensor TCS3200 terhubung ATmega8535 ... 34
Gambar 3.19 Motor Servo HXT5010 ... 35
Gambar 3.20 Motor Servo Futaba3003 ... 35
Gambar 3.21 Rangkaian Servo ke Mikrokontroler... 36
Gambar 3.22 PWM Motor Servo HXT5010... 39
Gambar 3.23 PWM Motor Servo Futaba3003 ... 39
Gambar 3.24 Rangkaian Regulator Tegangan ... 42
Gambar 3.25 Diagram Alir Utama... 43
Gambar 3.26 Diagram Alir Pengaturan Posisi Awal Robot ... 44
Gambar 3.27 Perioda 1 Gelombang... 45
Gambar 3.28 Diagram Alir Identifikasi Warna Objek... 46
xvi
Gambar 3.31 Diagram Alir Servo Mode Hijau... 50
Gambar 4.1 Sistem Minimum ATmega8535... 51
Gambar 4.2 Regulator Tegangan ... 51
Gambar 4.3 Robot Lengan Keseluruhan... 52
Gambar 4.4 Penempatan Objek, TCS3200 dan sistem minimum ... 52
Gambar 4.5 Robot Lengan ... 52
Gambar 4.6 TCS3200 ... 52
Gambar 4.7 Objek Berwarna ... 52
Gambar 4.8 Wadah Objek... 52
Gambar 4.9 Jarak Objek 2,5 cm... 57
Gambar 4.10 Jarak Objek 3 cm... 57
Gambar 4.11 Jarak Objek 4 cm... 57
Gambar 4.12 Jarak Objek 5 cm... 58
Gambar 4.13 Jarak Objek 6 cm... 58
Gambar 4.14 Jarak Objek 7 cm... 58
Gambar 4.15 Jarak Objek 8 cm... 58
Gambar 4.16 Jarak Objek 9 cm... 59
Gambar 4.17 Pengukuran Arus Motor Servo ... 59
Gambar 4.18 Sudut Putar Motor Servo 0° ... 60
Gambar 4.19 Sudut Putar Motor Servo 45° ... 60
Gambar 4.20 Sudut Putar Motor Servo 90° ... 61
Gambar 4.21 Pengamatan Sudut Putar Motor Servo 3 saat 0° ... 61
Gambar 4.22 Pengamatan Sudut Putar Motor Servo 3 saat 28° ... 61
xvii
Gambar 4.25 Pengamatan Sudut Putar Motor Servo Poros saat 120° ... 62
Gambar 4.26 Tampilan LCD saat Objek Merah ... 71
Gambar 4.27 Tampilan LCD saat Objek Biru ... 71
Gambar 4.28 Tampilan LCD saat Objek Hijau ... 72
xviii
Halaman
Tabel 2.1 Hubungan PIN dan Interrupt...8
Tabel 2.2 Konfigurasi kaki LCD 16x2...11
Tabel 2.3 Kombinasi Kaki Selektor...16
Tabel 2.4 Penskalaan Frekuensi OutputTC3200...16
Tabel 2.5 Regulator Tegangan Positif Seri 78XX ...21
Tabel 3.1 Penggunaan Port pada Mikrokontroler...31
Tabel 3.2 Karakteristik Motor Servo ...35
Tabel 3.3 Perhitungan Sudut Putar Motor Servo ...37
Tabel 3.4 Data Pengujian Motor Servo...38
Tabel 3.5 Perhitungan Torsi Motor Servo pada Robot Lengan ...40
Tabel 4.1 Data Pengujian Sensor TCS3200 pada Kondisi Cahaya Ruang Terang dan pada Kondisi Ruang Gelap...54
Tabel 4.2 Nilai Rata-Rata R G B Ruang Terang dan pada Ruang Gelap ...56
Tabel 4.3 Data Pengujian Jarak Jangkauan TCS3200 ...57
Tabel 4.4 Data Pengujian Tegangan dan Arus Motor Servo ...59
Tabel 4.5 Data Hasil Percobaan Robot dalam Mengambil dan Meletakan Objek Berwarna yang Tersusun Secara Acak ...73
1
PEDAHULUAN
1.1 Latar Belakang
Penggunaan robot di dalam kehidupan manusia semakin meningkat dari waktu ke
waktu. Robot sering digunakan untuk menangani berbagai tugas yang tidak dapat ditangani
oleh manusia, seperti di bidang nuklir, kimia, perjalanan ke luar angkasa dan tugas-tugas
lain yang dilakukan di lingkungan yang berbahaya [1]. Hal ini terjadi karena robot
memiliki banyak kelebihan yang tidak dimiliki manusia, diantaranya : menghasilkan
outputyang sama ketika mengerjakan suatu pekerjaan secara berulang-ulang, tidak mudah lelah, ketelitian dan kecepatan menyelesaikan tugas, dapat diprogram ulang sehingga dapat
difungsikan untuk beberapa tugas yang berbeda, dan lebih sedikit melakukan kesalahan
dibandingkan manusia.
Berbagai variasi robot yang diciptakan oleh manusia dapat membantu melakukan
tugas-tugas yang tidak dapat atau sulit dilakukan oleh manusia, salah satunya adalah robot
lengan. Robot lengan biasanya digunakan untuk mengambil dan memindahkan
objek/barang. Pada umumnya robot lengan dapat melakukan dua gerakan yaitu gerakan
berputar dan gerakan memanjang atau memendek [2]. Robot lengan memiliki 2 sisi yang
digunakan dalam melakukan pergerakan tersebut. Salah satu sisi yang disebut poros
ditanam pada bidang yang statis dan sisi lain disebut ujung (end effector) yang dapat dimuati dengan tool tertentu sesuai dengan tugas robot [2]. Umumnya toolyang digunakan adalah gripper yang dapat difungsikan sebagai penjepit atau pencengkeram objek yang akan diambil. Selain itu pergerakan robot lengan dapat diatur sesuai dengan kebutuhan
yang dinginkan, baik itu sudut putaran robot lengan atau pun jarak jangkauan lengan robot.
Melihat kemampuan robot lengan yang lebih dibandingkan manusia maka penulis
ingin membuat aplikasi robot lengan sebagai pemindah barang. Robot lengan ini berfungsi
untuk memindahkan barang dan menempatkannya berdasarkan warna barang tersebut.
Robot ini menggunakan sensor TCS3200 sebagai pengidentifikasi warna objek, 4 motor
servo sebagai aktuator robot lengan, dan gripper sebagai penjepit atau pencekram objek/barang. Robot lengan bekerja secara otomatis sesuai dengan instruksi yang telah
diprogram. Saat TCS3200 mengidentifikasi warna objek/barang maka data yang dihasilkan
motor servo untuk mengambil dan menempatkan barang tersebut pada kotak yang sudah
tersedia. Penempatan barang dan wadahnya sudah diatur sedemikian rupa sesuai dengan
jangkauan robot lengan dan karakteristik putaran motor servo yang digunakan.
1.2 Tujuan dan Manfaat
Tujuan penelitian ini adalah menghasilkan robot lengan sebagai pemindah barang
secara otomatis berdasarkan warna barang.
Manfaat dari penelitian ini adalah membantu memudahkan pekerjaan manusia baik
dari segi efisiensi waktu, tenaga, kualitas dan hasil yang didapat.
1.3 Batasan Masalah
Batasan masalah dari penelitian ini adalah :
1. Menggunakan sensor TCS3200 sebagai pengindentifikasi warna
objek/barang.
2. Warna barang yang dideteksi hanya tiga warna yaitu merah, biru, dan hijau.
3. Warna objek disusun secara acak dan terbuat dari bahan akrilik.
4. Barang berbentuk kotak yang berukuran 3x3x3 cm dengan berat sekitar 5
gram.
5. Jarak pengambilan barang dan wadah penampung barang dengan robot
lengan diatur dengan jarak 6 cm terhadap kotak penampung barang dan 18
cm terhadap posisi objek/barang, agar robot lengan dapat menjangkau barang
dalam proses pengambilan dan peletakan barang ke dalam wadah
penampung.
6. Menggunakan motor servo standar sebagai aktuator robot lengan.
7. Mikrokontroler menggunakan keluarga AVR ATmega8535 dan diprogram
menggunakan bahasa pemrograman C.
1.4 Metodologi Penelitian
Untuk dapat merealisasikan penelitian maka digunakan metode seperti berikut :
1. Mencari sumber informasi/literatur. Studi kepustakaan yang mencakup
2. Perancangan subsistem hardware dan software. Tahap ini bertujuan untuk mencari bentuk model yang optimal dari sistem yang akan dibuat dengan
mempertimbangkan dari berbagai faktor permasalahan dan kebutuhan yang
telah ditentukan. Gambar 1.1 adalah model diagram blok sistem yang akan
dirancang.
Gambar 1.1. Diagram Blok Sistem
3. Perancangan dan pembuatan sistem mekanik penggerak robot lengan dengan
model gambar 3D (3 dimensi). Kemudian menggunakan aklrik sebagai bahan
dasar pembuat robot lengan.
4. Perancangan dan pembuatan rangkaian elektronik sistem minimum
ATmega8535 dan regulator tegangan. Tahap ini meliputi perhitungan teoritis
dan pembuatan rangkaian PCB menggunakan softwareEAGLE.
5. Perancangan dan pembuatan program menggunakan bahasa C dengan
software CodeVisionAVR.
6. Proses pengambilan data. Teknik pengambilan data dilakukan dengan melihat
respon sensor TCS3200 terhadap warna merah, biru dan hijau serta motor
servo.
7. Analisa dan penyimpulan hasil percobaan. Analisa dan penyimpulan hasil
percobaan dapat dilakukan dengan melihat presentasi erroryang terjadi pada kinerja sistem secara keseluruhan, yaitu kondisi sensor TCS3200 terhadap
kondisi pencahayaan ruang yaitu jika mendapat cahaya terang atau dengan
pencahayaan yang kurang, jarak jangkau sensor, pergerakan motor servo
sebagai aktuator robot lengan , dan tingkat keberhasilan robot lengan dalam
1.5 Sistematika Penulisan
Sistematika penulisan tugas akhir ini adalah sebagai berikut :
BAB I: PENDAHULUAN
Bab ini berisi latar belakang masalah, tujuan dan manfaat, batasan masalah,
metodologi penelitian dan sistematika penulisan.
BAB II : DASAR TEORI
Bab ini berisi teori-teori yang mendukung kerja sistem dan teori yang
digunakan dalam perancangan.
BAB III : PERANCANGAN PENELITIAN
Bab ini berisi penjelasan alur perancangan robot lengan sebagai pemisah
barang berdasarkan warna dengan menggunakan Atmega8535.
BAB IV : HASIL PENGAMATAN DAN PEMBAHASAN
Bab ini berisi pengamatan dan pembahasan data yang diperoleh, berupa
data sensor TCS3200, motor servo dan tingkat keberhasilan keseluruhan
sistem robot lengan.
BAB V : KESIMPULAN DAN SARAN
Bab ini berisi ringkasan hasil penelitian yang telah dilakukan dan usulan
yang berupa ide-ide untuk perbaikan atau pengembangan terhadap
5
DASAR TEORI
2.1 Mikrokontroler AVR ATmega8535
AVR (Alf and Vegard’sRiscProcessor) merupakan seri mikrokontroler CMOS 8-bit
yang diproduksi oleh Atmel berbasis arsitekturRISC (Reduced Instruction Set Computer).
Chip AVR yang digunakan untuk tugas akhir ini adalah ATmega8535. Hampir semua
instruksi dieksekusi dalam satu siklus clockdan mempunyai 32 register general-purpose,
timer/counter fleksibel dengan mode compare, interupsi internal dan eksternal, serial
UART, programmable Watchdog Timer, dan power saving mode. AVR juga mempunyai ADC, PWM internal dan In-System Programmable Flash on-chip yang mengijinkan memori program untuk diprogram ulang [3].
2.1.1 Arsitektur AVR ATmega8535
Mikrokontroler ATmega8535 memiliki arsitektur sebagai berikut [3] :
a. Saluran IO sebanyak 32 buah, yaituPortA, PortB, PortC danPortD b. ADC 10 bitsebanyak 8 Channel
c. Tiga buah timer/counteryaitu Timer 0, Timer 1, dan Timer 2 d. Watchdog Timerdengan osilator internal
e. SRAM sebanyak 512 byte
f. Memori Flash sebesar 8 kb
g. Sumber Interupsi internal dan eksternal h. PortSPI (Serial Pheriperal Interface) i. EEPROM on board sebanyak 512 byte j. Komparator analog
k. PortUSART (Universal ShynchronousAshynchronous Receiver Transmitter)
2.1.2 Deskripsi Mikrokontroler ATmega8535
untuk program dan data). Ketika sebuah instruksi sedang dikerjakan maka instruksi berikutnya diambil dari memori program [3].
Mikrokontroler Atmega 8535 memiliki konfigurasi Pin sebagai berikut [3] : a. VCC (power supply)
b. GND (ground)
c. PortA (PA7..PA0) PortA berfungsi sebagaiinput analog pada ADC (analog digital converter). Port A juga berfungsi sebagai suatu Port I/O 8-bit dua arah.
d. Port B (PB7..PB0) Port B adalah suatu Port I/O 8-bit dua arah dengan resistor internal pull-up(yang dipilih untuk beberapabit).
e. Port C (PC7..PC0) Port C adalah suatu Port I/O 8-bit dua arah dengan resistor internal pull-up(yang dipilih untuk beberapabit).
f. Port D (PD7..PD0) Port D adalah suatu Port I/O 8-bit dua arah dengan resistor internal pull-up(yang dipilih untuk beberapabit).
g. RESET (Reset input)
h. XTAL1 (Input Oscillator) i. XTAL2 (Output Oscillator)
j. AVCC adalah pin penyedia tegangan untukPortA dan ADC. k. AREF adalah pin referensi analog untuk ADC.
Port A berfungsi sebagai input analog pada A/D Konverter dan port I/O 8-bit dua arah. Port B, Port C, Port D adalah suatu port I/O 8-bit dua arah dengan resistor internal
pull-up (yang dipilih untuk beberapa bit). Pada rangkaian reset, waktu pengosongan kapasitor dapat dihitung dengan persamaan 2.1.
T = R x C (2.1)
2.1.3 Organisasi Memori AVR ATmega8535
AVR arsitektur mempunyai dua ruang memori utama, Ruang. Memori data dan
Memori program. ATmega8535 juga memiliki fitur EEPROM Memori untuk penyimpanan data.
2.1.3.1 Memori Program
Kode program disimpan dalam flash memory, yaitu memori jenis non-volatile yang tidak akan hilang datanya meskipun catu daya dimatikan [5]. Dalam ATmega8535 terdapat
8Kbyte On-Chip di dalam sistem Memory Flash Reprogrammable untuk penyimpanan program. Untuk keamanan perangkat lunak, flash memori dibagi menjadi dua bagian, yaitu bootprogram dan bagian aplikasi program [3].
2.1.3.2. Memori Data
Memori data adalah memori RAM (Random Access Memory) yang digunakan untuk keperluan program. Memori data terbagi menjadi 4 bagian yaitu : 32 General Purphose Register adalah register khusus yang bertugas untuk membantu eksekusi program oleh ALU (Arithmatich Logic Unit). Dalam istilah processorkomputer sehari-hari GPR dikenal sebagai “chace memory” [16].
I/O register dan Aditional I/O registeradalah register yang difungsikan khusus untuk mengendalikan berbagai pheripheraldalam mikrokontroler seperti pin, port, timer/counter
[16].
2.1.4 Interupsi
Interupsi adalah suatu kondisi dimana mikrokontroler akan berhenti sementara dari program utama untuk melayani instruksi-instruksi pada interupsi kemudian kembali mengerjakan instruksi program utama setelah instruksi-instruksi pada interupsi selesai
Table 2.1. Hubungan PIN dan Interupsi [4]
Jenis interupt PIN pada Atemega 8535
INT0 PORTD.2
INT1 PORTD3
INT2 PORTB.2
ATmega8535 menyediakan tiga interupsi eksternal yaitu, INT0, INT1, dan INT2. Masing-masing interupsi tersebut terhubung dengan pin ATmega8535 seperti ditunjukan
pada Tabel 2.1. Interupsi eksternal bisa dilakukan dengan memberikan logika 0 atau perubahan logika (rissing edgedan falling edge) pada pin interupsi yang bersangkutan.
2.1.5 Timer/Counter
ATmega 8535 memiliki tiga modul timeryang terdiri dari dua buah timer/counter 8 bit dan satu buah timer/counter 16 bit. Ketiga modul ini dapat diatur dalam mode yang berbeda-beda secara individu dan tidak saling mempengaruhi satu sama lain. Selain itu
semua timer/counterjuga dapat difungsikan sebagai sumber interupsi [5].
2.1.5.1 Timer/conter0
Timer/counter0 merupakan modul timer/counter 8 bit dengan fitur sebagai berikut :
a. timer/counter1 kanal
b. Auto reloadyaitu timer akan dinolkan kembali saat match compare
c. Dapat menghasilkan pulsa PWM (pulse width modulation) dengan glitch free
d. Frequency generator
e. Prescalar 10 bit untuk timer
f. Membangkitkan interupsi saattimer overflow dan ataumatch compare
Perhitungan overflow interrupt sebagai pembangkit PWM ditunjukan pada persamaan 2.1 dan 2.2 berikut [14].
= (2.2)
ℎ =
∗
T O = Timer Overflow(T x bit timer)
OCR = nilai cacahan pulsa (Output Compare Register/OCR) T = Lebar pulsa
Berikut merupakan mode-mode operasi timer:
a. Mode normal, timerdigunakan untuk menghitung saja, membuat delay, dan mengitung selang waktu [11].
Gambar 2.2.Mode Phase CorrectPWM [3]
b. Mode phase correct PWM (PCP), digunakan untuk menghasilkan sinyal PWM dimana nilai register counter (TCNT0) yang mencacah naik dan turun secara terus menerus akan selalu dibandingakan dengan register pembanding OCR0 [5]. Hasil perbandingan register TCNT0 dan OCR0 digunakan untuk membangkitkan sinyal PWM yang dikeluarkan pada OC0 seperti ditunjukan Gambar 2.2.
c. CTC (Clear timer on compare match), register counter (TCNT0) akan mencacah naik kemudian di-reset atau kembali menjadi 0x00 pada saat nilai TCNT0 sama dengan OCR0. Sebelumnya OCR diset dulu, karena timer 0 dan 2 maksimumnya 255, maka rangeOCR 0-255 [5].
Gambar 2.3.Mode FastPWM [3]
2.2 LCD (Liquid Crystal Display)
Terdapat 2 jenis LCD yaitu LCD karakter dan LCD grafik. LCD karakter, adalah
LCD yang tampilannya terbatas pada tampilan karakter, khususnya karakter ASCII (seperti karakter-karakter yang tercetak pada keyboard komputer). Sedangkan LCD grafik, adalah LCD yang tampilannya tidak terbatas, bahkan dapat menampilkan foto. LCD grafik inilah yang terus berkembang seperti layar LCD yang biasa dilihat di notebook/laptop[6].
Jenis LCD karakter yang beredar di pasaran biasa dituliskan dengan bilangan matriks
dari jumlah karakter yang dapat dituliskan pada LCD tersebut, yaitu jumlah kolom karakter dikali jumlah baris karakter. Sebagai contoh, LCD16x2, artinya terdapat 16 kolom dalam 2 baris ruang karakter seperti ditunjukan pada Gambar 2.4, yang berarti total karakter yang dapat dituliskan adalah 32 karakter [6].
Agar dapat mengendalikan LCD karakter dengan baik, tentu diperlukan koneksi yang
benar. Untuk itu perlu diketahui pin-pin antarmuka yang dimiliki oleh LCD karakter seperti yang ditunjukan pada Gambar 2.5 dan Tabel 2.2.
Gambar 2.5. Konfigurasi kaki LCD 16x2 [6]
Tabel 2.2. Konfigurasi kaki LCD 16x2 [6]
Nomor
PIN
PIN Keterangan
1 VSS GND
2 VDD 5V
3 Vo Kontras
4 RS
5 R/W Read / Write
6 EN Enable
7 DB0 Data 0
8 DB1 Data 1
9 DB2 Data 2
10 DB3 Data 3
11 DB4 Data 4
12 DB5 Data 5
13 DB6 Data 6
14 DB7 Data 7
15 -
-16 -
dikirimkan. Untuk mengirimkan data ke LCD, maka melalui program EN harus dibuat
logika low “0” dan set pada dua jalur kontrol yang lain RS dan RW. Ketika dua jalur yang lain telah siap, set EN dengan logika “1” dan tunggu untuk sejumlah waktu tertentu (sesuai dengan datasheet dari LCD tersebut) dan berikutnya set EN ke logika low “0” lagi. Jalur RS adalah jalur Register Select. Ketika RS berlogika low “0”, data akan dianggap sebagai sebuah perintah atau instruksi khusus (seperti clear screen, posisikursor, dll). Ketika RS
berlogika high “1”, data yang dikirim adalah data text yang akan ditampilkan pada display LCD. Sebagai contoh, untuk menampilkan huruf “1” pada layer LCD maka RS harus diset logika high “1”, jalur R/W adalah jalur control Read/Write. Ketika RW berlogika low (0), maka informasi pada bus data akan dituliskan pada layar LCD. Ketika RW berlogika high ”1”, maka program akan melakukan pembacaan memori dari LCD. Sedangkan pada aplikasi umum pin R/W selalu diberi logika low “0”. Pada akhirnya, bus data terdiri dari 4
atau 8 jalur (bergantung pada mode operasi yang dipilih oleh user). Pada kasus bus data 8 bit, jalur diacukan sebagai DB0 s/d DB7.
2.3 Robot Lengan
Robot lengan merupakan gabungan dari beberapa segmen dan sendi yang secara umum dibagi menjadi tiga bagian , yaitu : arm, wirst, dan gripper. Robotic Industries Association (RIA) mendefinisikan robot lengan sebagai lengan yang didesain untuk memindahkan material, benda, alat tertentu lewat pergerakan yang terprogram untuk melakukan berbagai macam tugas [7].
Robot lengan diilustrasikan pada Gambar 2.6 adalah robot lengan yang memiliki dua
lengan dan pergelangan. Di ujung pergelangan dapat diinstal berbagai tool sesuai dengan fungsi yang diharapakan. Jika dipandang dari sudut pergerakan maka terdiri dari tiga pergerakan utama yaitu badan robot yang dapat berputar ke kiri dan ke kanan, lengan masing-masing dapat bergerak ke atas dan ke bawah, dan gerak pergelangan sesuai dengan sifat tool[8].
Perangkat pendukung robot lengan secara umum dapat ditunjukan pada Gambar 2.7 yang terdiri dari beberapa komponen, yaitu :
1. Manipulator 2. Sensor 3. Aktuator 4. Kontroler
Gambar 2.7. Sistem Robot Lengan [7]
Manipulator adalah bagian mekanik yang dapat difungsikan untuk memindah, mengangkat dan memanipulasi benda kerja. Sensor adalah komponen berbasis instrumentasi (pengukuran) yang berfungsi sebagai pemberi informasi tentang berbagai
keadaan atau kedudukan dari bagian-bagian robot.
servo, motor steper, motor DC dan sebagainya), penggerak pneumatik (berbasis kompresi:
udara, nitrogen) dan penggerak hidrolik (berbasis benda cair: minyak pelumas)
Kontroler adalah rangkaian elekronik berbasis mikroprosesor yang berfungsi sebagai pengatur seluruh komponen.
2.4 Gripper
Gripperadalah sebuah efektor yang berfungsi untuk menggenggam dan menahan objek. Objek ini merupakan sebuah komponen yang akan dipindahkan oleh robot dapat
berupa kertas, botol, bahan mentah dan peralatan-peralatan lain [9].
Menurut jumlah peralatan penggenggam dan penahan, gripper dapat diklasifikasikan menjadi dua, yaitu: grippertunggal dan gripperganda, masing masing memiliki kelebihan dan kekurangan sesuai dengan tujuan dari sistem robot. Grippertunggal diartikan bahwa hanya ada satu peralatan untuk menggenggam dan menahan yang dipasang pada wrist. Gripperganda diartikan bahwa ada dua peralatan yang berfungsi sebagai penggenggam dan penahan objek yang dipasang pada wrist[9].
Gambar 2.8. Jenis GripperMekanik [9]
memberikan kontak pada objek. Biasanya menggunakan finger/jari mekanik yang disebut dengan jaws. Fingerini dapat dilepas dan dipasang sehingga sangat fleksibel pemakaiannya. Sumber tenaga yang berikan pada gripperini bisa berupa pneumatik, hidrolik, dan elektrik.
2.5 Sensor TCS3200
TCS3200 adalah IC pengkonversi warna cahaya ke frekuensi. Ada dua komponen utama pembentuk IC ini yaitu, fotodioda dan pengkonversi arus ke frekuensi seperti di
tunjukan pada Gambar 2.9 [10].
Warna dasar penyusun ada tiga yaitu merah, hijau, dan biru atau lebih dikenal dengan istilah RGB (Red, Green, Blue) . Gambar 2.10 menunjukan beberapa samplewarna dan komposisi RGB. Fotodioda pada IC TC3200 disusun secara array 8x8 dengan konfigurasi sebagai berikut : 16 fotodioda untuk memfilter warna merah, 16 fotodioda untuk memfilter warna hijau, 16 fotodioda untuk memfilter warna biru dan 16 fotodioda
tanpa filter.
Gambar 2.10.SampleWarna dan Komposisi RGB [18]
Dapat dilakukan pengaturan pada fotodioda yang akan dipakai sebagai pemfilter warna yaitu dengan mengatur melalui kaki selektor S2 dan S3. Kombinasi kaki S2 dan S3
dapat dilihat pada Tabel 2.3.
Tabel 2.3 Kombinasi Kaki Selektor [10]
S2 S3 Fotodioda yang
aktif
0 0 Pemfilter merah
0 1 Pemfilter biru
1 0 Tanpa filter
1 1 Pemfilter hijau
Frekuensi output TCS3200 bisa diskala dengan mengatur kaki selektor S0 dan S1. Penskalaan output ditunjukan pada tabel 2.4 berikut.
Tabel 2.4 Penskalaan Frekuensi OutputTC3200 [10]
S0 S1 Skala Frekuensi
Output 0 0 Power Down
0 1 2%
1 0 20%
2.6 Motor Servo
Motor servo biasanya digunakan untuk robot berkaki, lengan robot atau sebagai
aktuator pada mobil robot. Motor servo adalah sebuah motor dengan sistem umpan balik tertutup di mana posisi dari motor akan diinformasikan kembali ke rangkaian kontrol yang ada di dalam motor servo. Motor servo terdiri dari sebuah motor DC, beberapa gear, sebuah potensiometer, sebuah output shaftdan sebuah rangkaian kontrol elektronik [11].
Gambar 2.11. Motor Servo [15]
Motor servo dikemas dalam bentuk kotak segiempat seperti ditunjukan pada Gambar 2.11, terdiri dari tiga kabel konektor yaitu power(Vdd),control(I/O pin) dan ground(Vss) seperti ditunjukan pada gambar 2.12.Gear motor servo ada yang terbuat dari plastik, metal atau titanium. Di dalam motor servo terdapat potensiometer yang digunakan sebagai sensor posisi. Potensiometer tersebut dihubungkan dengan output shaft untuk mengetahui posisi aktual shaft. Ketika motor dc berputar maka output shaft juga berputar dan sekaligus memutar potensiometer. Rangkaian kontrol dapat membaca kondisi potensiometer tersebut untuk mengetahui posisi akutal shaft. Jika posisinya sesuai dengan yang diingikan , maka motor dc akan berhenti [4].
Gambar 2.12. Konfigurasi Pin Motor Servo [15]
ada dua jenis motor servo yaitu :
2. Motor servo continous, motor servo yang mampu bergerak CW dan CCW tanpa batasan sudut operasi (berputar secara kontiyu)
Motor servo biasanya menggunakan tegangan 4,8 V hingga 7,2 V. Motor servo dikendalikan dengan cara mengirimkan sebuah pulsa yang lebarnya bervariasi. Lebar pulsa antara 1 ms sampai 2 ms dengan periode pulsa sebesar 20 ms.
Gambar 2.13. Sinyal untuk Mengendalikan Motor Servo [4]
Lebar pulsa akan mengakibatkan perubahan posisi pada motor servo. Misalnya
sebuah pulsa 1,5 ms akan memutar motor pada posisi 90° (posisi netral). Agar posisi servo tetap pada posisi maka pulsa harus terus diberikan pada servo. Jadi mesikipun ada gaya yang melawan, servo akan tetap bertahan pada posisinya. Gaya maksimum servo tergantung dari rentang torsi servo.
Gambar 2.14. Lebar Pulsa dan Posisi Servo [4]
servo akan berputar CW menuju posisi tertentu dari posisi netral seperti di tunjukan pada
gambar 2.14. Setiap servo memiliki spesifikasi lebar pulsa minimum dan maksimum sendiri-sendiri, tergantung jenis dan merk servo. Umumnya antara 1 ms sampai 2 ms. Parameter lain yang berbeda antara servo satu dengan servo lainnya adalah kecepatan servo untuk berubah dari posisi satu ke posisi lainnya (operating speed) [4].
2.6.1 Torsi / Momen Gaya
Momen Gaya (Torsi (τ)) adalah kemampuan gaya F memutar/merotasi benda
terhadap poros diam. Sehingga semakin besar torsi (τ) maka gaya F memutar benda pun semakin besar [21].
Rumus :
τ = F r sin 0 (2.4)
τ = Torsi (N-m)
F = Gaya (N), F = m x g
r = Jarak dari titik pangakal gaya sampai sumbu putar 0 = Derajat sumbu putar
2.7 Regulator Tegangan IC 7805 dan 7806
Perangkat elektronika mestinya dicatu oleh suplai arus searah DC (direct current) yang stabil agar dapat bekerja dengan baik. Baterai atau accu adalah sumber catu daya DC yang paling baik. Namun untuk aplikasi yang membutuhkan catu daya lebih besar, sumber dari baterai tidak cukup. Sumber catu daya yang besar adalah sumber bolak-balik AC (alternating current) dari pembangkit tenaga listrik. Untuk itu diperlukan suatu perangkat catu daya yang dapat mengubah arus AC menjadi DC [12]. Dengan prinsip penyearah (rectifier) maka dapat dihasilkan tegangan DC seperti ditunjukkan pada Gambar 2.15. Pada saat terminal A positif dan terminal B negatif , dioda D2 dan D3 berada dalam kondisi
menghantar arus seadangkan D4 dan D1 tidak menghantar. Pada saat terminal A negatif dan
B positif , dioda yang menghantar adalah D4dan D1, sedang D2 dan D3 tidak menghantar.
menurunkan tegangan AC dari jala-jala listrik pada kumparan primernya menjadi tegangan
AC yang lebih kecil pada kumparan sekundernya.
Gambar 2.15. Penyearah Gelombang Penuh [12]
Penentuan nilai kapasitor yang berfungsi untuk memperkecil ripple Untuk itu dapat digunakan persamaan 2.5 sebagai tegangan ripple[22].
Vripple = ∆ = (2.5)
Vr = Tegangan ripple
I = Arus T = 1/f C = kapasitor
Rangkaian penyearah pada dasarnya sudah cukup bagus jika teganganripple-nya kecil, namun ada masalah pada stabilitas tegangan yang dihasilkan. Jika tegangan PLN naik/turun, maka tegangan output-nya juga akan naik/turun. Untuk mengatasi hal tersebut maka digunakan IC regulator sebagai penstabil tegangan. kongifurasi pin IC regulator ditunjukan pada Gambar 2.16.
Karakteristik IC Regulator :
a. Output arus 1A
b. OutputTegangan 5, 6, 8, 9, 10, 12, 15, 20, 24 V c. Dapat bertahan pada suhu yang berlebihan
Tabel 2.5 menunjukkan beberapa contoh IC regulator seri 78XX dengan keluaran dan tegangan minimum yang diperlukan.
Tabel 2.5. Regulator Tegangan Positif Seri 78XX [13] ICPart Tegangan Keluaran Tegangan Masukan Minimum
7805 +5 V 7,3
7806 +6 V 8,3
7810 +10 V 12,5
7812 +12 V 14,6
7815 +15 V 17,7
PERANCANGAN PENELITIAN
Dalam bab III ini akan dibahas mengenai perancangan perangkat keras dan perancangan perangkat lunak. Pembahasan ini meliputi :
a. Proses kerja dan mekanisme robot lengan b. Perancangan mekanik
c. Perancangan perangkat keras d. Perancangan perangkat lunak
3.1 Proses Kerja dan Mekanisme Gerak Robot Lengan
Pada tugas akhir ini, akan dibuat sebuah robot lengan yang mampu memindahkan dan menempatkan barang secara otomatis berdasarkan warna barang. Digunakan sensor TCS3200 yang mengidentifikasi warna barang dan motor servo sebagai aktuator. Saat sensor TC3200 medeteksi warna barang maka data yang dihasilkan TCS3200 akan diolah di dalam mikrokontroler yang telah diprogram kemudian akan menjalankan motor servo sebagai aktuator robot lengan seperti ditunjukan pada Gambar 3.1 yang merupakan diagram blok sistem.
Proses mekanisme pergerakan robot lengan diawali dengan proses untuk memposisikan robot lengan dengan tepat yaitu pada posisi berdiri tegak. Robot lengan akan mulai bergerak secara otomatis setelah menerima data dari sensor TCS3200 sebagai identifikasi warna barang. Proses selanjutnya adalah pengambilan dan peletakan barang/objek yang dimulai dengan pergerakan aktuator pada link 2. Motor servo 3 pada
link 2 menggerakan seluruh bidang pada joint 2 lalu di ikuti link 1 yang menggerakan seluruh bidang pada joint 1. Pergerakan kedua link tersebut di atur dalam mikrokontoler dengan memberi sudut putar dalam bentuk pulsa PWM pada motor servo yang sesuai sehingga posisi robot lengan tepat pada barang agar pada saat pencengkeraman dilakukan dapat mencengkeram barang dengan baik. Proses pencekraman dilakukan oleh motor servo 1 yang menggerakan gripper sebagai pencengkeram barang. Kemudian motor servo 3 bergerak ke posisi semula agar saat proses peletakan barang tidak terjadi benturan. Proses selanjutnya adalah meletakan barang pada kotak penampungan barang yang disesuaikan dengan warna barang. Pada proses ini motor servo 4 pada poros robot mempunyai peran utama, motor tersebut akan menggerakan poros robot lengan dengan sudut putar yang telah diatur sesuai dengan warna barang yang telah diidentifikasi oleh sensor TCS3200. Jika barang berwana merah maka sudut putar motor servo 4 bergerak dari 180° ke 140°, jika barang berwarna biru maka sudut putar motor dari 180° ke 100°, jika barang berwarna hijau maka sudut putar motor dari 180° ke 120°. Keterbatasan gerakan link dikarenakan oleh karakteristik motor yang digunakan yaitu motor servo standar yang memiliki sudut putar dari 0° sampai 180°. Gambar 3.2 menunjukan keseluruhan sistem robot lengan.
3.2 Perancangan Mekanik Robot Lengan
Pada tahap ini dilakukan perancangan mekanik dari robot tersebut, antara lain mendisain ukuran robot, penggunaan bahan dasar untuk mekanik robot yaitu aklirik setebal 3 mm. Pendisainan robot menggunakan software Google Sketchup untuk gambar tiga dimensi dan software Corel Drawuntuk gambar dua dimensi. Robot lengan terdiri dari 5 bagian utama yaitu poros, gripper, komponen 1, komponen 2, komponen 3, komponen 4. Gambar 3.3 menunjukan anatomi robot lengan secara keseluruhan.
Gambar 3.3. Model Anatomi Robot Lengan
Gambar 3.4. Robot Lengan Komponen 1
Gambar 3.6. Robot Lengan Komponen 3 dan 4
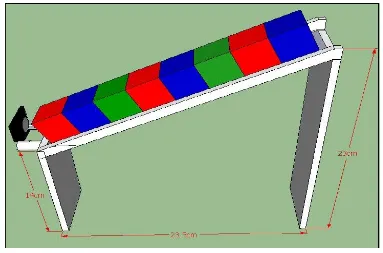
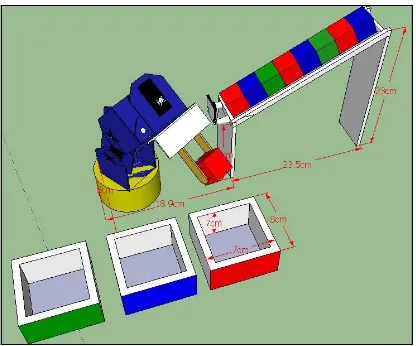
Untuk penempatan posisi barang, didisain dengan model kemiringan yang bertujuan agar barang dapat bergerak seperti berada pada konveyer sehingga dapat memudahkan robot lengan dalam proses pengambilan seperti yang di tunjukan pada Gambar 3.8. Objek/barang berbentuk kotak berukuran 3x3x3 cm yang terbuat dari bahan aklirik.
Gambar 3.8. Posisi Penempatan Barang
Perancangan mekanik robot lengan menggunakan metode puzzle dalam membentuk tiap bagian dari anatomi robot lengan. Berikut adalah gambar dua dimensi menggunakan
software Corel Draw untuk tiap-tiap bagian dari robot lengan seperti yang terlihat pada Gambar 3.9 dan 3.10.
Gambar 3.10. Sketsa Robot Lengan Komponen 2 , Komponen 4 dan Poros
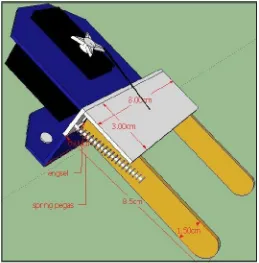
Gambar 3.11 adalah model gripperpenjepit barang, untuk bahan gripperdigunakan aklirik 5 mm dan seutas tali yang digunakan untuk menggerakan gripperdalam menjepit barang. Penggunaan engsel bertujuan agar gripper memiliki sendi gerak dalam membuka dan menutup sedangkan spring digunakan untuk memposisikan gripper ke keadaan membuka setelah dilakukan proses penjepitan.
Gambar 3.11.Gripper
barang. Dengan menggunakan software Autodesk 3ds Max sebagai animasi pergerakan robot lengan maka dapat diketahui jarak jangkau robot lengan sehingga mempermudah dalam memposisikan letak robot lengan dengan objek/barang dan wadah penampungnya. Gambar 3.12 menunjukan jarak antara robot lengan dengan objek dan wadahnya.
Gambar 3.12. Jarak Robot Lengan dengan Objek dan Wadahnya
3.3 Perancangan Perangkat Keras
Ada beberapa bagian utama dalam perancangan subsitem perangkat keras robot lengan otomatis , yaitu :
a. Sistem minimum menggunakan mikrokontorler ATmega8535 b. Sensor TCS3200
c. Motor servo
3.3.1 Sistem Minimum Mikrokontroler ATmega8535
Rangkaian Sistem Minimum berfungsi sebagai I/O untuk mengolah data dari sensor TCS3200 dan mengontrol/mengendalikan sudut putar motor servo yang telah diprogram dalam mikrokontroler ATmega8535 pada robot lengan. Mikrokontroler membutuhkan sistem minimum yang terdiri dari rangkaian eksternal yaitu, rangkaian osilator, rangkaian
reset.
Untuk rangkaian osilator digunakan crystal dengan frekuensi sebesar 11,0592 MHz dan menggunakan kapasitor 22 pf pada pin XTAL1 dan XTAL2 di mikrokontroler. Rangkaian osilator ini berfungsi sebagai sumber clock bagi mikrokontroler. Pemberian kapasitor bertujuan untuk memperbaiki kestabilan frekuensi yang diberikan oleh osilator eksternal. Gambar 3.13 menunjukan rangkaian osilator.
Gambar 3.13. Rangkaian Osilator ATmega8535 [3]
Perancangan rangkaian reset bertujuan untuk memaksa proses kerja pada mikrokontroler dapat diulang dari awal. Saat tombol reset ditekan maka mikrokontroler mendapat input logika rendah, sehingga akan me-reset seluruh proses yang sedang dilakukan mikrokontroler. Gambar 3.14 adalah rangkaian reset untuk ATmega8535.
Fungsi resistor dan kapasitor adalah untuk tunda waktu tegangan yang masuk ke reset. Waktu yang dibutuhkan untuk reset eksternal tidak sama dengan waktu input VCC, sehingga waktu reset diberikan setelah waktu input VCC. Untuk itu diperlukan kapasitor dan resistor sebagai penundanya dan waktu pengisian kapasitor sebagai jedanya. Waktu pengisian kapasitor minimum sesuai dengan datasheetyaitu 2us. Maka jika menggunakan kapasitor sebesar 10nF, nilai resistor minimum dapat dihitung dengan persamaan 2.1.
T = R x C
Maka R = 2us/10nF
= 200Ω
Untuk memperoleh waktu yang lebih dari 2us , maka nilai resistor harus lebih besar dari 200 Ω. Oleh karena itu digunakan resistor 4700 Ω untuk meperoleh waktu pengisian 47us.
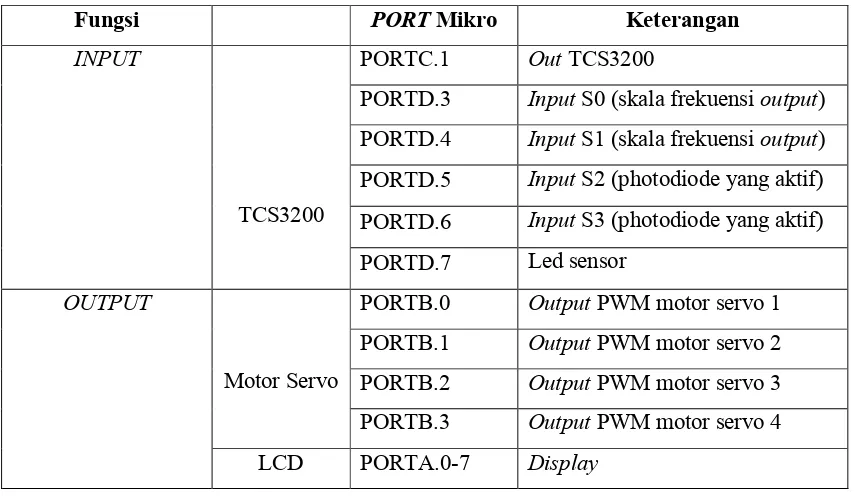
Perancangan penggunaan port sebagai input dan output pada mikrokontroler ATmega8535 disesuaikan dengan kebutuhan yaitu sejumlah 11 pin. Sensor TCS3200 dengan 5 pin pada PORTD dan Out pada PORTC, motor servo dengan 4 pin pada PORTB dan LCD dengan 7 pin pada PORTA. Tabel 3.1 menunjukan penggunaan port pada mikrokontroler yang digunakan sebagai input dan output dari motor servo dan sensor TCS3200.
Tabel 3.1. Penggunaan Portpada Mikrokontroler
Fungsi PORTMikro Keterangan
INPUT
TCS3200
PORTC.1 Out TCS3200
PORTD.3 Input S0 (skala frekuensi output) PORTD.4 Input S1 (skala frekuensi output) PORTD.5 Input S2 (photodiode yang aktif) PORTD.6 Input S3 (photodiode yang aktif) PORTD.7 Led sensor
OUTPUT
Motor Servo
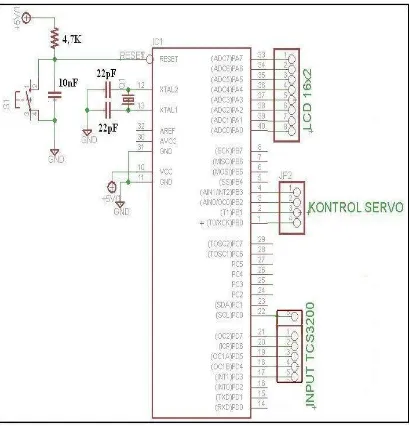
Secara keseluruhan rangkaian sistem minimum ATmega8535 ditunjukan pada Gambar 3.15.
Gambar 3.15. Rangkaian Sistem Minimum ATmega8535
3.3.2 Rangkaian Konfigurasi LCD 16x2
Gambar 3.16. Rangkaian LCD 16x2
Gambar 3.17. PengaturanPortLCD pada Code Vision AVR
3.3.3 Perancangan Sensor TCS3200
Perlakuan terhadap sensor TCS3200 yaitu dengan memberikan logika high(1) dan low (0) ke kaki selektor S2 dan S3 maka filter aktif, serta penskalaan frekuensi output 100% yaitu dengan memberikan 5V ke kaki selektor S0 dan S1, yang semuanya dilakukan dengan memberikan perintah pengalamatan dari mikrokontroler. Kaki S0 dihubungkan ke portD.3, S1 ke PortD.4, S2 ke PortD.5, S3 PortD.6, Led ke PortD.7 dan Out ke PortC.1. pemasangan kapasitor 10uF pada vdd dan 5V disesuaikan pada datasheet TCS3200 yang berfungsi sebagai sebagai penstabil tegangan dan respon transien. Gambar 3.18 berikut ini menunjukan hubungan pin sensor TCS3200 dengan mikrokontroler ATmega8535.
Gambar 3.18. Rangkaian Sensor TCS3200 terhubung ATmega8535 3.3.4 Motor Servo
merk Futaba S3003,seperti yang ditunjukan pada Gambar 3.19 dan 3.20. Pemilihan motor servo yang berbeda disesuaikan dengan kebutuhan. Digunakan motor servo Futaba S3003 dengan sudut putar 0-180° karena motor tersebut akan difungsikan sebagai motor poros robot lengan yang membutuhkan sudut putar yang lebih lebar dibanding motor link1,link
2 dan link 3 dalam proses peletakan barang. Karakteristik motor servo HXT5010 dan Futaba S3003 berdasarkan datasheetditunjukan pada Tabel 3.2.
Tabel 3.2. Karakteristik Motor Servo
Kecepatan (6V) : 0,19sec/60deg
mengaktifkan motor servo dan mengatur sudut putarnya. Gambar 3.21 berikut merupakan pin motor servo yang terhubung ke mikrokontroler.
Gambar 3.21. Pin Motor Servo ke Mikrokontroler
Pengujian dan pengambilan data pada keempat motor servo yang digunakan sebagai aktuator robot lengan bertujuan, untuk mengetahui sudut putar yang terukur dari karakterisktik motor servo tersebut. Pengujian dilakukan dengan memberi tegangan masukan pada motor servo sebesar 5V dan masukan berupa PWM sebagai sinyal pengontrol sudut putar motor yang berasal dari servo controller menggunakan ATmega8535. Tabel 3.3 adalah hasil pengujian dari empat motor servo yang digunakan.
Digunakan interrupt timer sebagai pembangkit PWM. Secara prinsip, sebuah timer adalah sebuah counter (penghitung). Tugas timer hanya menghitung, timer selalu menyimpan hitungannya saat menghitung “satu, dua, tiga, …” hingga 255 (8 bit). Naiknya hitungan timer dan berapa lama jeda antar hitungan ini ditentukan dari siklus pencacah uC, mode timer. Pada perancangan motor servo, timer diset agar menghitung sampai 255. Dan jika sudah mencapai 255, maka timer (overflow)akan memberikan sinyal, disinilah PWM bekerja dan mengintruksikan timer untuk menghitung lagi dari 0. Demikian seterusnya terjadi jika nilai 255 tercapai.
perhitung overflow interruptsebagai pembangkit PWM untuk mengatur sudut putar motor servo.
Frekuesi kristal = 11,059200 MHz
Dengan menggunakan timer0/8bit dan nilai prescaler 256 sebagai pengatur kecepatan clock
maka timer overflowyang dihasilkan (0,09 x 10-6) x 256 = 23,04 x 10-6. Tabel 3.2 berikut adalah perhitungan sudut putar motor servo.
Tabel 3.3. Perhitungan Sudut putar Motor Servo
Merk
Servo
Arah Putaran Sudut putar
Nilai OCR =
HXT5010
Kiri (lebar pulsa 1 ms) 0° 1 10
23,04 10 = 43,40
Tengah (lebar pulsa 1,5 ms) 45° 1,5 10
23,04 10 = 65,10
Kanan (lebar pulsa 2 ms) 90° 2 10
23,04 10 = 86,80
Futaba S3003
Kiri (lebar pulsa 0,3 ms) 0° 0,3 10
23,04 10 = 19,02
Tengah (lebar pulsa 1,3 ms) 90° 1,3 10
23,04 10 = 56,42
Kanan (lebar pulsa 2,3 ms) 180° 2,3 10
Tabel 3.4. Data Pengujian Motor Servo
Gambar 3.22. Lebar Pulsa dan Posisi Motor Servo HXT5010
Gambar 3.23. Lebar Pulsa dan Posisi Motor Servo Futaba S3003 3.3.4.1 Perhitungan Torsi Motor Servo terhadap Beban
Tabel 3.5. Perhitungan Torsi Motor Servo pada Robot Lengan Motor Penggerak Torsi
Motor 1 sebagai penggerak
gripper
Beban pada gripper = 32 gr
F = m x g
= 0,032 x 9,8 = 0,31 N maka
τ = F r sin 0
= (0,31) (0,077) sin 90 = 0,02 N-m = 0,20 Kg-cm Motor 2
Beban = 91 gr Maka F = m x g
= 0.091 x 9,8 = 0,8918 N
τ = F r sin 0
= (0,8918)(0,11074) sin 5 = 0,008 N-m=0,08 kg-cm Motor 3
Beban = 106 gr Maka F = m x g
= 0,106 x 9,8 = 1,0388 N
τ = FR sin 0
Tabel 3.5. (lanjutan)Perhitungan Torsi Motor Servo pada Robot Lengan Motor 4
Beban = 182 gr Maka F = m x g
= 0,182 x 9,8 = 1,7836 N
Untuk 400
τ = F r sin 0
= (1,7836) (0,2168) sin 40 = 0,248 N-m= 2,52 kg-cm
Untuk 800
τ = F r sin 0
= (1,7836) (0,2168) sin 80 = 0,38 N-m= 3,87 kg-cm
Untuk 1200
τ = F r sin 0
= (1,7836) (0,2168) sin 120 = 0,334 N-m=3,40 kg-cm
3.3.5 Regulator Tegangan menggunakan IC 7805 dan IC 7806
Regulator dengan IC7805 ini digunakan sebagai sumber tegangan bagi sistem minimum ATmega8535, TCS3200 dan regulator dengan IC7806 digunakan untuk mencatu motor servo sebagai aktuator. Digunakan trafo step-down 1A untuk mengubah tegangan listrik AC 220V/50Hz menjadi lebih kecil. Setelah tegangan AC dikecilkan menggunakan trafo step-down maka untuk menghasilkan tegangan DC digunakan diode bridge 1A sebagai penyearah tegangan AC ke DC. Gambar 3.24 menunjukan rangkaian regulator 5
Gambar 3.24. Rangkaian Regulator Tegangan
Dalam merancang regulator agar memiliki tegangan ripple yang tidak lebih 0,75 vpp dari jala-jala listrik PLN 220V/50Hz untuk menyuplai arus 1A, maka digunakan beberapa nilai kapasitor untuk memperkecil rippletegangan DC yang dihasilkan. Dengan persamaan 2.4 maka dapat dihitung nilai kapasitor yang harus digunakan.
c = I load ∗ TVripple
Makac = ∗ .
. = 1333,3uF
Namun karena nilai kapasitor 1333,3uF tidak terdapat di pasaran maka digunakan kapasitor dengan nilai 2200uF. Pengubahan nilai kapasitor yang semakin besar justru berdampak memperkecil tegangan ripple. Sesuai dengan rumus di atas, jika arus beban I semakin besar, maka teganganrippleakan semakin besar. Sebaliknya jika kapasitansi C semakin besar, maka teganganrippleakan semakin kecil.
Nilai T diperoleh dari T=1/2*50Hz = 0,01 dan agar diperoleh tegangan keluaran yang lebih stabil di perlukan IC regulator sebagai penstabil tegangan. Untuk itu digunakan IC7805 dan IC7806 untuk menghasilkan tegangan keluaran stabil 5 volt dan 6volt. Nilai kapasitor C2 dan C3 disesuaikan berdasarkan datasheetIC regulator 7805 dan 7806 yaitu C2= 0,33uF dan C3 = 0,1uF. Fungsi kapasitor C1 sebagai filter tegangan DC, C2 sebagai penstabil tegangan dan respon transien yaitu respon terhadap perubahan sinyal
3.4 Perancangan Perangkat Lunak
Perancangan perangkat lunak merupakan tahap pembuatan program yang nantinya difungsikan untuk menjalankan robot lengan agar sesuai dengan tugas dan tujuannya. Perancangan perangkat lunak meliput program utama dan subroutineprogram.
Gambar 3.25 menunjukan program utama proses kerja mikrokontroler secara keseluruhan. Proses diawali dengan inisialisasi port pada mikrokontroler, lalu proses pengaturan posisi robot lengan, pada proses ini motor servo diatur pada posisi sudut putar yang berbeda-beda,motor 1 pada posisi 0°, motor 2 pada posisi 90°, motor 3 pada posisi 0° dan motor 4 pada posisi 180°. Kemudian dilanjutkan proses pengidentifikasian warna objek oleh sensor TCS3200. Setelah TCS3200 mendeteksi warna objek maka, mikrokontroler mulai menjalankan intruksi untuk menggerakan motor servo. Pengaturan sudut putar servo tergantung pada warna objek yang dideteksi oleh sensor TCS3200. Proses selanjutnya robot lengan mengambil objek dan meletakknya pada wadah yang telah tersedia sesuai dengan warna objek tersebut. Proses akan terus berjalan selama sensor TCS3200 masih mengidentifikasi adanya objek berwarna merah, biru, dan hijau dan akan selesai jika barang telah habis dan jika sensor tidak mendeteksi adanya barang maka robot kembali pada posisi awal.
3.4.1 Program Pengaturan Awal Posisi Robot
Gambar 3.26 menunjukan proses pengaturan awal posisi robot. Pada proses ini, semua motor servo diatur dengan sudut putar yang berbeda karena posisi peletakan motor pada robot lengan tidak sama, motor 1 pada sudut 0°, motor 2 pada sudut 90°, motor 3 pada sudut 0° dan motor 4 pada sudut 180° . Hal ini bertujuan agar robot lengan berada pada posisi yang dapat bergerak untuk menjangkau objek yang akan diambil dan dapat begerak dalam proses peletakan objek pada tempatnya.
Mulai
X< m_1
PORTB.1 1 PORTB.1 0
Ya Tidak x==896
Selesai
Pemberian nilai OCR untuk tiap motor pada sudut 0, 90, dan 180
derajat X 1
Tidak
Ya Data overflow x==896, selama
T 20ms (x++)
3.4.2 Program Indentifikasi Warna Objek menggunakan Sensor
TCS3200
Dalam pembacaan data sensor ini cukup rumit karena data outputnya berupa frekuensi pulsa kotak dengan duty cycle 50 %. Maka dari itu diperlukan suatu frekuensi
reader dengan memfungsikan uC ATmega8535 sebagai pembaca frekuensi. Pada perancangan ini akan dihitung lama waktu high dan low satu gelombang penuh sebagai periodenya, maka 1/periode akan menghasilkan nilai frekuensi seperti ditunjukan pada Gambar 3.27 dalam menghitung frekuensi selama T=1ms.
Gambar 3.27. Perioda 1 Gelombang
pembagian data frekuensi (1/perioda) R G B dari objek tersebut dengan terhadap data referensi kalibrasi dan kemudian ditampilkan ke LCD yaitu berupa data R G B. Setelah data R G B dari objek diketahui maka proses selanjutnya adalah pengaturan sudut putar motor servo yang disesuaikan dengan warna objek yang telah diidentifikasi. Jika data R yang diperoleh adalah lebih besar dibanding dengan data G dan B maka mikrokontroler akan mengerjakan instruksi gerak servo mode merah, jika data B lebih besar dibanding dengan data R dan G maka mikrokontroler akan mengerjakan instruksi gerak mode biru, dan jika data G lebih besar dibanding data R dan B maka mikrokontroler akan mengerjakan instruksi gerak servo mode hijau.
Mulai
3.4.3 Program Pengendali Sudut Putar Motor Servo dalam Pengambilan
dan Peletakan Objek
Pada perancangan program untuk mengendalikan motor servo dibagi dalam tiga bagian berdasarkan warna objek, yaitu :
a. Gerak Servo modemerah b. Gerak Servo mode biru c. Gerak Servo modehijau
Data cacahan yang diberikan untuk menggerakan motor servo memiliki range yang disesuaikan dengan penggunaan kristal dan mode timer. Dengan periode servo selama 20ms maka diperoleh nilai cacahan overflowdengan persamaan 2.3 sebagai berikut
cacahan (1/frek. kristal) ∗ 255= 1/50
cacahan (1/11059200) ∗ 255=1/50
cacahan = 869
a. Gerak Servo ModeMerah
b. Gerak Servo ModeBiru
c. Gerak Servo Mode Hijau
51
HASIL PENGAMATAN DAN PEMBAHASAN
Pada bab ini akan dibahas mengenai hasil pengamatan dari robot lengan sebagai
pemisah barang berdasarkan warna. Hasil pengamatan berupa pengujian sensor TCS3200
terhadap tiga warna yaitu merah, biru, dan hijau pada kondisi pencahayaan ruang terang dan
gelap, jarak jangkauan sensor TCS3200, tingkat keberhasilan robot lengan serta pengamatan
terhadap pergerakan motor servo sebagai aktuator robot lengan.
4.1 Betuk Fisik dan Sistem Kerja Robot Lengan
Perangkat keras robot lengan tersusun atas sistem minimum ATMega8535 dan
rangkaian regulator seperti pada Gambar 4.1 dan Gambar 4.2. dan bentuk fisik robot lengan
ditunjukkan pada Gambar 4.3, Gambar 4.4, Gambar 4.5, Gambar 4.6, Gambar 4.7 dan Gambar
4.8.
Gambar 4.3. Robot Lengan Keseluruhan
Gambar 4.5. Robot Lengan
Gambar 4.7. Objek Berwarna
Gambar 4.4. Penempatan Objek,TCS3200 dan Sistim Minimum
Gambar 4.6. TCS3200
Gambar 4.1 menunjukkan board dari sistem minimum Atmega8535 sebagai pengolah
data I/O dari sensor dan motor servo, Gambar 4.2 menunjukkanboarddari regulator tegangan
sebagai catu daya untuk sistem, Gambar 4.3, 4.4, 4.5, 4.6, 4.7, 4.8 menunjukkan sistem
keseluruhan robot lengan dan bagian-bagiannya yang terdiri dari penempatan objek, sensor
TCS3200 dan sistem minimum, robot lengan , letak sensor terhadap objek berwarna, objek
yang berbentuk kotak, dan wadah penampung objek berwarna.
Mekanisme kerja sistem robot lengan adalah robot bekerja secara otomatis sesuai
dengan instruksi yang telah diprogram. Ketika tombol ON-OFFdinyalakan maka sistem aktif
dan secara otomatis robot akan memulai proses pengambilan dan peletakan objek berwarna.
Diawali dengan proses pendeteksian warna objek oleh sensor TCS3200 setelah itu motor servo
akan menggerakan robot untuk mengambil objek berwarna dan meletakkannya ke kotak
penampung objek yang sesuai dengan warna objek tersebut. Proses pengambilan dan
peletakan objek akan terus dilakukan jika sensor TCS3200 masih mendeteksi adanya objek
dan akan berhenti ketika sensor sudah tidak mendeteksi adanya objek atau ketika tombol
ON-OFF dimatikan.
4.2 Hasil Data Pengujian dan Pembahasan
Pada sub bab ini, dilakukan pengujian dan pembahasan terhadap sensor TCS3200 yaitu
pada kondisi pencahayaan ruang terang dan gelap, jarak jangkauan sensor, dan pengamatan
pergerakan motor servo sebagai aktuator.
4.2.1 Pengujian Sensor TCS3200
Dilakukan pengujian sensor TCS3200 pada 2 kondisi yang berbeda yaitu pada kondisi
pencahayaan ruang terang dan gelap dengan objek yang terbuat dari bahan akrilik yang telah
dicat. Data yang diambil adalah nilai R G B untuk setiap sisi dari objek berwarna yang
berbentuk kotak yaitu sisi 1a-1f, 2a-2f dan 3a-3f. Tabel 4.1 menunjukkan perbandingan hasil
Tabel 4.1. Data Pengujian Sensor TCS3200 pada Kondisi Cahaya Ruang Terang dengan
Intesitas cahaya 77 lux dan pada Kondisi Ruang Gelap dengan intesitas cahaya 16 lux
Tabel 4.1. (Lanjutan) Data Pengujian Sensor TCS3200 pada Kondisi Cahaya Ruang Terang
dengan Intesitas cahaya 77 lux dan pada Kondisi Ruang Gelap dengan intesitas cahaya 16 lux
Data Tabel 4.1 menunjukkan nilai R G B untuk kondisi pencahayaan ruang yang terang
dan gelap dengan intesitas cahaya ruang terang adalah 77 lux dan dengan intensitas cahaya
ruang gelap adalah 16 lux. Terlihat adanya perbedaan data yang dihasilkan, hal ini dipengaruhi
oleh ketidakmerataan warna pada saat proses pengecatan, ada yang tebal dan ada yang tipis.
Jika pada saat sensor membaca warna salah satu sisi objek yang tebal maka nilai R G B yang
dihasilkan lebih besar dibanding dengan warna yang tipis. Misalnya untuk nilai R pada objek
merah 1a dan 3a, nilai R pada objek 3a lebih besar dari objek merah 1a artinya objek merah 3a
memiliki tingkat warna cat yang lebih tebal dibanding objek merah 1a.
![Gambar 2.1. Konfigurasi Pin Mikrokontroler ATmega8535 [3]](https://thumb-ap.123doks.com/thumbv2/123dok/1752945.2090272/24.612.259.412.119.272/gambar-konfigurasi-pin-mikrokontroler-atmega.webp)
![Gambar 2.2. Mode Phase Correct PWM [3]](https://thumb-ap.123doks.com/thumbv2/123dok/1752945.2090272/27.612.187.502.188.396/gambar-mode-phase-correct-pwm.webp)
![Gambar 2.11. Motor Servo [15]](https://thumb-ap.123doks.com/thumbv2/123dok/1752945.2090272/35.612.259.394.523.595/gambar-motor-servo.webp)
![Gambar 3.13. Rangkaian Osilator ATmega8535 [3]](https://thumb-ap.123doks.com/thumbv2/123dok/1752945.2090272/48.612.290.371.542.679/gambar-rangkaian-osilator-atmega.webp)