TUGAS AKHIR - Robot lengan otomatis sebagai pemisah barang berdasarkan warna dengan menggunakan Atmega8535 - USD Repository
Teks penuh
Gambar
![Gambar 2.1. Konfigurasi Pin Mikrokontroler ATmega8535 [3]](https://thumb-ap.123doks.com/thumbv2/123dok/1752945.2090272/24.612.259.412.119.272/gambar-konfigurasi-pin-mikrokontroler-atmega.webp)
![Gambar 2.2. Mode Phase Correct PWM [3]](https://thumb-ap.123doks.com/thumbv2/123dok/1752945.2090272/27.612.187.502.188.396/gambar-mode-phase-correct-pwm.webp)
![Gambar 2.11. Motor Servo [15]](https://thumb-ap.123doks.com/thumbv2/123dok/1752945.2090272/35.612.259.394.523.595/gambar-motor-servo.webp)
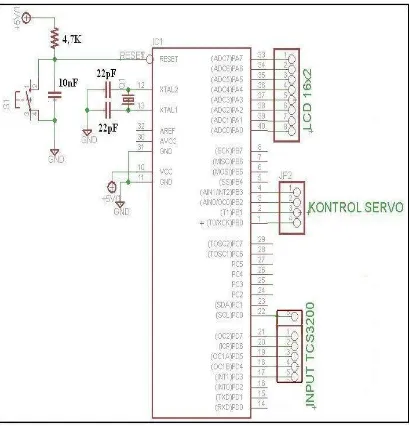
![Gambar 3.13. Rangkaian Osilator ATmega8535 [3]](https://thumb-ap.123doks.com/thumbv2/123dok/1752945.2090272/48.612.290.371.542.679/gambar-rangkaian-osilator-atmega.webp)
Dokumen terkait
Terselesaikannya tugas akhir dengan judul “ PERANCANGAN SISTEM KENDALI ROBOT TANGAN MENGGUNAKAN MOTOR SERVO DAN SENSOR FLEX BERBASIS MIKROKONTROLER ATMEGA32 ” ini tidak
Bagaimana robot ini mampu membedakan warna objek yang
Aplikasi modul sensor kamera pada robot penjejak warna terdiri dari sistem minimum ATmega32 yang berfungsi mengolah data yang dikirimkan oleh modul sensor kamera CMUCam3..
Alat ini akan bekerja dengan menyeleksi warna buah kopi yang merah yang berarti matang dan warna hijau berarti belum matang, pada alat ini dilengkapi dengan
Motor servo adalah sebuah motor dengan sistem closed feedback di mana posisi dari motor akan diinformasikan kembali ke rangkaian kontrol yang ada di dalam
Benda padat selanjutnya yang di deteksi oleh sensor warna adalah warna biru,maka secara otomatis servo 2 akan menutup atau menyortir benda padat tersebut untuk masuk ke
Sensor cahaya photodioda akan mendeteksi barang berdasarkan warnanya dan barang tersebut akan diangkat oleh forklift dengan menggunakan motor DC, yang kemudian
MENGGUNAKAN MOTOR SERVO DAN SENSOR FLEX BERBASIS MIKROKONTROLER ATMEGA32” yang dibuat untuk memenuhi sebagian syarat memperoleh gelar Sarjana Teknik Program
