Abstrak—GPS CORS - RTK NTRIP (Global Positioning System Continuously Operating Reference Stations – Real Time Kinematic Network Transport of RCTM via Internet Protocol) merupakan teknologi penentuan posisi secara real time dengan ketelitian yang cukup tinggi. Salah satu stasiun CORS yang berfungsi sebagai titik referensi RTK NTRIP di Surabaya terletak di Jurusan Teknik Geomatika FTSP Kampus ITS Sukolilo. Teknologi CORS ini relatif baru di Indonesia, sehingga perlu dilakukan penelitian untuk penggunaan teknologi RTK NTRIP GPS. Penelitian ini dilakukan di Jalan Teknik Kimia ITS dan di On Ramp Menanggal Waru dengan panjang jalan 1 km yang berjarak 1 km dan 10 km dari base station CORS ITS. Digunakan RTK NTRIP GPS dan Total Station (TS) untuk pengambilan data pada titik yang sama. Dari penelitian ini, peta jalan hasil pengukuran menggunakan GPS CORS - RTK NTRIP dan Total Station pada lokasi ITS mempunyai selisih rata – rata dE(Easting)= 8,1 cm sedangkan dN(Northing)= 7,5 cm dan untuk lokasi Waru nilai rata – rata dE(Easting)= -78,8 cm sedangkan dN(Northing)= -244,1 cm.
Kata kunci--- CORS , GPS, RTK-NTRIP, TS
I. PENDAHULUAN
ALAH satu teknologi pemetaan yang mulai dikembangkan di Indonesia yang digunakan untuk kebutuhan rekayasa dan penelitian tentang penentuan posisi yaitu GNSS CORS (Global Navigation Sattelite System Continuously Operating Reference Stations). CORS merupakan jaring kerangka geodetik aktif berupa stasiun permanen yang dilengkapi dengan receiver yang dapat menerima sinyal dari satelit GPS (Global Positioning Syestem) dan satelit GNSS lainnya, yang beroperasi secara kontinyu selama dua puluh empat jam [1]. Terobosan pemetaan nantinya diharapkan dapat menggunakan GPS CORS dengan menggunakan metode RTK (Real Time Kinematik) berbasiskan NTRIP (Networked Transport of RTCM via Internet Protocol). RTK merupakan metode berdasarkan pada carrier phase dalam penetuan posisi secara relatif dengan tingkat ketelitian mencapai satuan 1-5 sentimeter secara real time [2]. Pada sistem ini stasiun GNSS CORS berperan sebagai base station sedangkan untuk rover menggunakan GPS yang didukung dengan perangkat mobile
agar dapat melakukan streming data koreksi secara real time menggunakan koneksi internet.
Sebelumnya terdapat beberapa metode lain yang umum telah digunakan di Indonesia yaitu pengukuran GPS dengan metode RTK untuk pekerjaan geodesi seperti pemetaan, Staking out, dll. Metode ini menggunakan 2 buah GPS tipe geodetik sebagai base dan rover . Pengukuran dengan metode RTK ini juga memiliki tingkat ketelitian hingga sentimeter namun kelemahan dari teknologi ini sangat dipengaruhi jarak antara GPS base dan GPS rover . Hal ini dikarenakan dalam proses pengiriman data koreksi secara real time menggunakan gelombang radio yang beroperasi pada pita frekuensi VHF/UHF, sehingga menyebabkan semakin jauh jaraknya akan mengakibatkan terganggunya gelombang radio sebagai media pengiriman data koreksi dan juga penggunaan GPS harus berada pada area yang bebas dari gangguan.
Metode pengukuran lainnya adalah dengan menggunakan alat TS (Total Statation). Alat ini menggunakan sudut dan jarak antara alat TS dan prisma untuk mendefinisikan titik koordinat diatas permukaan bumi. Keunggulan dari metode terestris menggunakan TS adalah dapat digunakan pada berbagai medan seperti hutan, tambak, lapangan, jalan dll. Sedangkan kelemahan penggunaan TS ini terdapat pada jangkauan jarak dan kebebasan pandang TS ke prisma. Sehingga kedua metode ini, baik RTK GPS maupun TS cukup tergantung dari jarak, sehingga semisal dalam pengerjaan staking out jalan atau pemetaan jalan yang cukup panjang dan membutuhkan ketelitian yang cukup tinggi, akan sangat mempengaruhi efektifitas waktu kerja.
Pengukuran dengan metode RTK NTRIP memiliki keunggulan pada jarak karena proses pengiriman data koreksi antara base station GPS (GNSS CORS) dan rover menggunakan koneksi internet. Namun, karena teknologi GNSS CORS menggunakan metode RTK NTRIP masih cukup baru, maka dalam penelitian ini dilakukan pengkajian untuk hasil penggunaan metode penentuan posisi dengan menggunakan GPS CORS-RTK NTRIP yang dibandingkan dengan hasil pengukuran terestris menggunakan TS, dimana hasilnya akan dapat digunakan sebagai pertimbangan untuk penggunaan metode GPS COR-RTK NTRIP dalam pekerjaan pemetaan tertentu.
Studi Perbandingan GPS RTK NTRIP Berbasis
CORS Dengan Total Station
Yoga Prahara Putra
dan Khomsin
Jurusan Teknik Geomatika, Fakultas Teknik Sipil dan Perencanaan, Institut Teknologi Sepuluh
Nopember (ITS)
Jl. Arief Rahman Hakim, Surabaya 60111 Indonesia
: [email protected]
II. METODELOGIPENELITIAN
A. Lokasi Penelitian
Lokasi penelitian Tugas akhir ini mengambil daerah studi di kampus Institut Teknologi Sepuluh Nopember tepatnya terletak di (70 16’ 32” - 70 16’ 55”) LS dan (1220 47’ 41” - 1220 47’ 57”) BT dan di On Ramp Menanggal, Waru, Surabaya yang terletak pada (70 20’ 44” - 70 20’ 40”) LS dan (1220 43’ 47” - 1220 44’ 04”)BT.
B. Metodelogi Penelitian
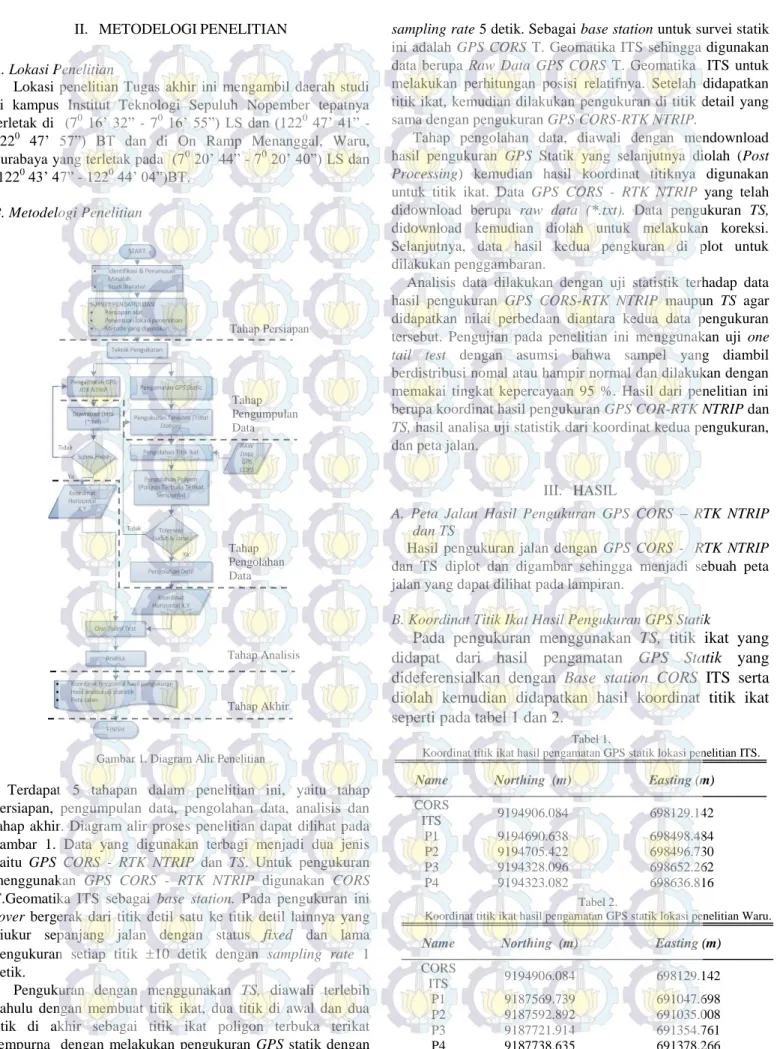
Gambar 1. Diagram Alir Penelitian
Terdapat 5 tahapan dalam penelitian ini, yaitu tahap persiapan, pengumpulan data, pengolahan data, analisis dan tahap akhir. Diagram alir proses penelitian dapat dilihat pada gambar 1. Data yang digunakan terbagi menjadi dua jenis yaitu GPS CORS - RTK NTRIP dan TS. Untuk pengukuran menggunakan GPS CORS - RTK NTRIP digunakan CORS T.Geomatika ITS sebagai base station. Pada pengukuran ini rover bergerak dari titik detil satu ke titik detil lainnya yang diukur sepanjang jalan dengan status fixed dan lama pengukuran setiap titik 10 detik dengan sampling rate 1 detik.
Pengukuran dengan menggunakan TS, diawali terlebih dahulu dengan membuat titik ikat, dua titik di awal dan dua titik di akhir sebagai titik ikat poligon terbuka terikat sempurna dengan melakukan pengukuran GPS statik dengan
sampling rate 5 detik. Sebagai base station untuk survei statik ini adalah GPS CORS T. Geomatika ITS sehingga digunakan data berupa Raw Data GPS CORS T. Geomatika ITS untuk melakukan perhitungan posisi relatifnya. Setelah didapatkan titik ikat, kemudian dilakukan pengukuran di titik detail yang sama dengan pengukuran GPS CORS-RTK NTRIP.
Tahap pengolahan data, diawali dengan mendownload hasil pengukuran GPS Statik yang selanjutnya diolah (Post Processing) kemudian hasil koordinat titiknya digunakan untuk titik ikat. Data GPS CORS - RTK NTRIP yang telah didownload berupa raw data (*.txt). Data pengukuran TS, didownload kemudian diolah untuk melakukan koreksi. Selanjutnya, data hasil kedua pengkuran di plot untuk dilakukan penggambaran.
Analisis data dilakukan dengan uji statistik terhadap data hasil pengukuran GPS CORS-RTK NTRIP maupun TS agar didapatkan nilai perbedaan diantara kedua data pengukuran tersebut. Pengujian pada penelitian ini menggunakan uji one tail test dengan asumsi bahwa sampel yang diambil berdistribusi nomal atau hampir normal dan dilakukan dengan memakai tingkat kepercayaan 95 %. Hasil dari penelitian ini berupa koordinat hasil pengukuran GPS COR-RTK NTRIP dan TS, hasil analisa uji statistik dari koordinat kedua pengukuran, dan peta jalan.
III. HASIL
A. Peta Jalan Hasil Pengukuran GPS CORS – RTK NTRIP dan TS
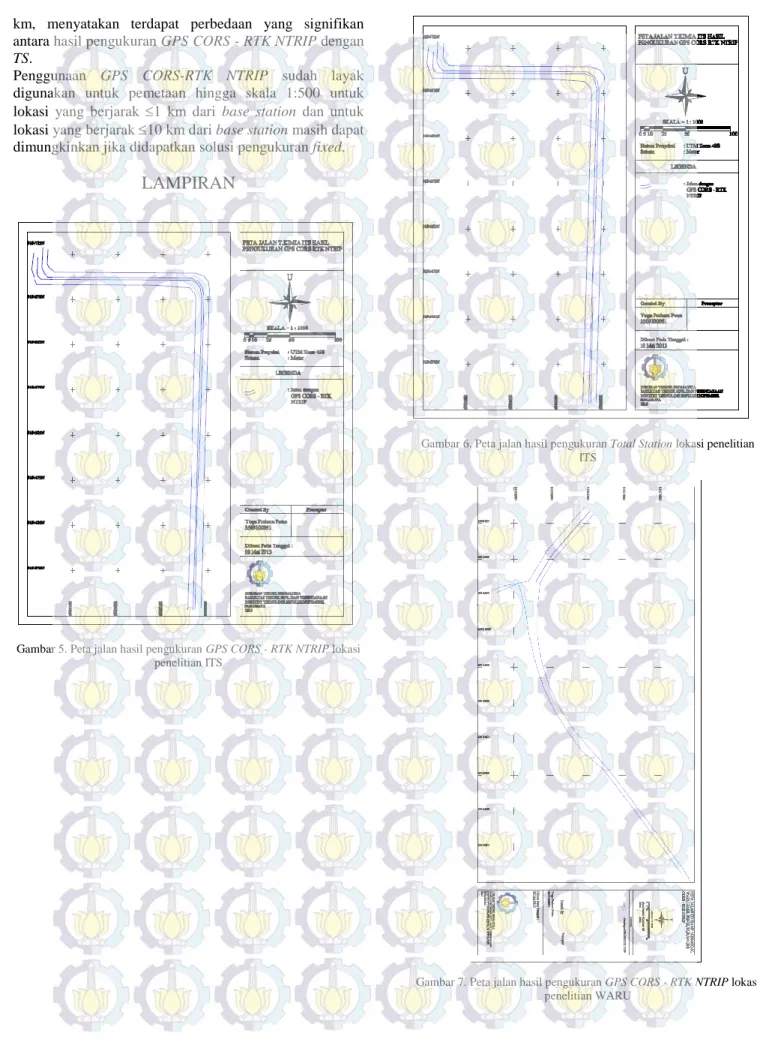
Hasil pengukuran jalan dengan GPS CORS - RTK NTRIP dan TS diplot dan digambar sehingga menjadi sebuah peta jalan yang dapat dilihat pada lampiran.
B. Koordinat Titik Ikat Hasil Pengukuran GPS Statik
Pada pengukuran menggunakan
TS,
titik ikat yang
didapat dari hasil pengamatan
GPS Statik
yang
dideferensialkan dengan
Base station CORS
ITS serta
diolah kemudian didapatkan hasil koordinat titik ikat
seperti pada tabel 1 dan 2.
Tahap Persiapan Tahap Pengumpulan Data Tahap Pengolahan Data Tahap Analisis Tahap Akhir Tabel 1.
Koordinat titik ikat hasil pengamatan GPS statik lokasi penelitian ITS.
Name Northing (m) Easting (m)
CORS ITS 9194906.084 698129.142 P1 9194690.638 698498.484 P2 9194705.422 698496.730 P3 9194328.096 698652.262 P4 9194323.082 698636.816 Tabel 2.
Koordinat titik ikat hasil pengamatan GPS statik lokasi penelitian Waru.
Name Northing (m) Easting (m)
CORS ITS 9194906.084 698129.142 P1 9187569.739 691047.698 P2 9187592.892 691035.008 P3 9187721.914 691354.761 P4 9187738.635 691378.266
Dari koordinat titik ikat tersebut, kemudian dilakukan koreksi poligon dengan metode poligon terbuka terikat sempurna. Dari hasil perhitungan poligon diperoleh kesalahan linier relatif jarak sebesar
6711
1 (ITS) dan 6369
1 (Waru), kesalahan ini memenuhi toleransi pengukuran jarak dimana toleransinya: 6000 1 2 2 D f fx y (1) 6000 1 6711 1 (ITS), 6000 1 6369 1 (Waru)
Sedangkan untuk toleransi pengukuran sudut, didapatkan koreksi sudutnya sebesar -2,346”(ITS) dan -3,666”(Waru) kesalahan ini memenuhi toleransi pengukuran sudut dimana untuk syarat toleransi sudut adalah
2
"
n
(n=4 titik, ketelitian alat 2”). Jadi didapatkan
2
,
346
"
4
"
(ITS) dan"
4
"
666
,
3
(Waru). Dari hasil tersebut maka perhitungan poligon sudah memenuhi toleransi jarak dan sudut.C. Uji Statistik
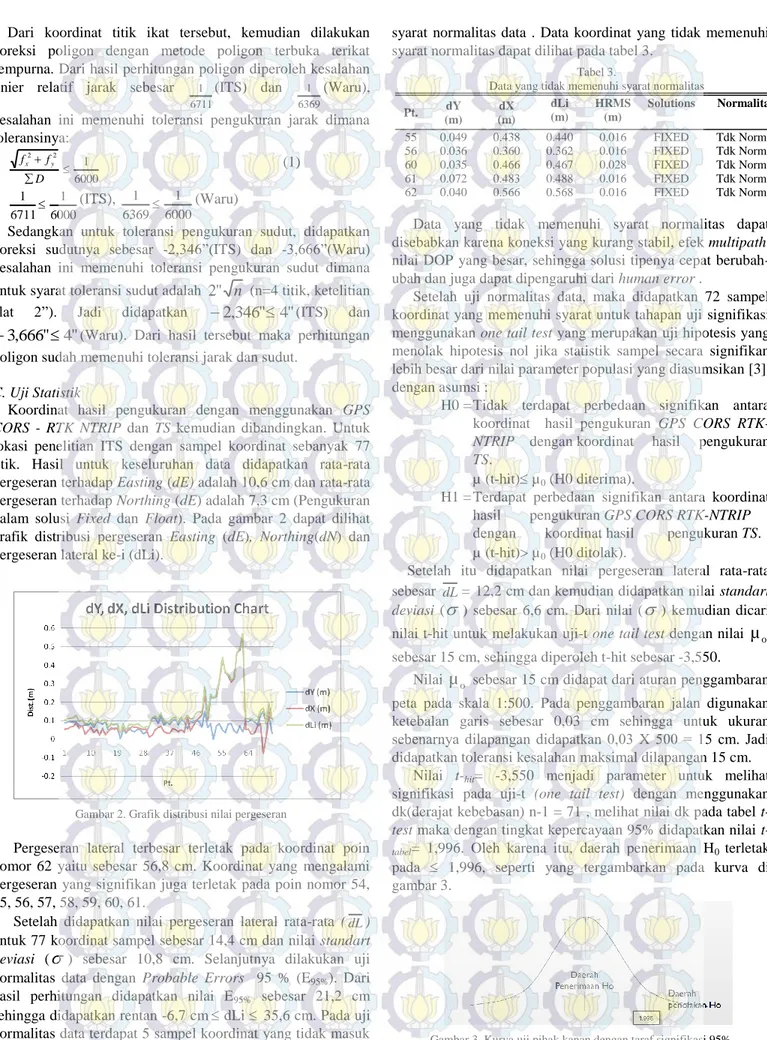
Koordinat hasil pengukuran dengan menggunakan GPS CORS - RTK NTRIP dan TS kemudian dibandingkan. Untuk lokasi penelitian ITS dengan sampel koordinat sebanyak 77 titik. Hasil untuk keseluruhan data didapatkan rata-rata pergeseran terhadap Easting (dE) adalah 10,6 cm dan rata-rata pergeseran terhadap Northing (dE) adalah 7,3 cm (Pengukuran dalam solusi Fixed dan Float). Pada gambar 2 dapat dilihat grafik distribusi pergeseran Easting (dE), Northing(dN) dan pergeseran lateral ke-i (dLi).
Gambar 2. Grafik distribusi nilai pergeseran
Pergeseran lateral terbesar terletak pada koordinat poin nomor 62 yaitu sebesar 56,8 cm. Koordinat yang mengalami pergeseran yang signifikan juga terletak pada poin nomor 54, 55, 56, 57, 58, 59, 60, 61.
Setelah didapatkan nilai pergeseran lateral rata-rata (dL) untuk 77 koordinat sampel sebesar 14,4 cm dan nilai standart deviasi (
) sebesar 10,8 cm. Selanjutnya dilakukan uji normalitas data dengan Probable Errors 95 % (E95%). Dari hasil perhitungan didapatkan nilai E95% sebesar 21,2 cm sehingga didapatkan rentan -6,7 cm dLi 35,6 cm. Pada uji normalitas data terdapat 5 sampel koordinat yang tidak masuksyarat normalitas data . Data koordinat yang tidak memenuhi syarat normalitas dapat dilihat pada tabel 3.
Data yang tidak memenuhi syarat normalitas dapat disebabkan karena koneksi yang kurang stabil, efek multipath, nilai DOP yang besar, sehingga solusi tipenya cepat berubah-ubah dan juga dapat dipengaruhi dari human error .
Setelah uji normalitas data, maka didapatkan 72 sampel koordinat yang memenuhi syarat untuk tahapan uji signifikasi menggunakan one tail test yang merupakan uji hipotesis yang menolak hipotesis nol jika statistik sampel secara signifikan lebih besar dari nilai parameter populasi yang diasumsikan [3], dengan asumsi :
H0 = Tidak terdapat perbedaan signifikan antara koordinat hasil pengukuran GPS CORS RTK-NTRIP dengan koordinat hasil pengukuran TS.
µ (t-hit) µ0 (H0 diterima).
H1 = Terdapat perbedaan signifikan antara koordinat hasil pengukuran GPS CORS RTK-NTRIP
dengan koordinat hasil pengukuran TS. µ (t-hit) µ0 (H0 ditolak).
Setelah itu didapatkan nilai pergeseran lateral rata-rata sebesar dL = 12,2 cm dan kemudian didapatkan nilai standart deviasi (
) sebesar 6,6 cm. Dari nilai (
) kemudian dicari nilai t-hit untuk melakukan uji-t one tail test dengan nilaiµ
o sebesar 15 cm, sehingga diperoleh t-hit sebesar -3,550.Nilai
µ
o sebesar 15 cm didapat dari aturan penggambaran peta pada skala 1:500. Pada penggambaran jalan digunakan ketebalan garis sebesar 0,03 cm sehingga untuk ukuran sebenarnya dilapangan didapatkan 0,03 Х 500 = 15 cm. Jadi didapatkan toleransi kesalahan maksimal dilapangan 15 cm.Nilai t-hit= -3,550 menjadi parameter untuk melihat
signifikasi pada uji-t (one tail test) dengan menggunakan dk(derajat kebebasan) n-1 = 71 , melihat nilai dk pada tabel test maka dengan tingkat kepercayaan 95% didapatkan nilai
t-tabel= 1,996. Oleh karena itu, daerah penerimaan H0terletak pada 1,996, seperti yang tergambarkan pada kurva di gambar 3.
Gambar 3. Kurva uji pihak kanan dengan taraf signifikasi 95% Tabel 3.
Data yang tidak memenuhi syarat normalitas
Pt. dY (m) dX (m) dLi (m) HRMS (m) Solutions Normalitas 55 0.049 0.438 0.440 0.016 FIXED Tdk Normal 56 0.036 0.360 0.362 0.016 FIXED Tdk Normal 60 0.035 0.466 0.467 0.028 FIXED Tdk Normal 61 0.072 0.483 0.488 0.016 FIXED Tdk Normal 62 0.040 0.566 0.568 0.016 FIXED Tdk Normal
Dari kurva diatas, menunjukkan nilai t-hit terletak pada
daerah penerimaan H0, sehingga dapat disimpulkan tidak terdapat perbedaan signifikan antara koordinat detil jalan hasil pengukuran GPS CORS-RTK NTRIP dengan koordinat detil jalan hasil pengukuran TS yang terikat pada poligon terbuka terikat sempurna. Hasil ini juga dapat dilihat dari nilai rata-rata pergeseran terhadap Easting (dE) sebesar 8,1 cm dan Norting (dN) sebesar 7,5 cm.
Hasil pengukuran untuk jarak 10 km (Waru) didapatkan koordinat sampel sebanyak 47 titik. Namun, pada semua hasil pengukuran GPS CORS - RTK NTRIP tdak didapatkan solusi tipe Fixed sama sekali, hal ini dapat disebabkan karena gangguan koneksi antara base station dan rover ataupun server dari NTRIP itu sendiri. Sehingga hasil yang didapatkan hanya Float, DGPS, SDGPS dan Autonomous. Sehingga untuk keseluruhan data didapatkan nilai rata-rata pergeseran terhadap Easting (dE) sebesar -78,8 cm dan Norting (dN) sebesar -244,1 cm, sedangkan nilai pergeseran lateral rata-rata (dL) sebesar 301,3 cm. Berikut ini pada gambar 4 adalah grafik distribusi pergeseran Easting (dE), Northing(dN) dan pergeseran lateral ke-i (dLi).
Gambar 4. Grafik distribusi data Waru
Pergeseran lateral terbesar terletak pada koordinat poin nomor 31 yaitu sebesar 746,1 cm (Solusi DGPS, lokasi titik dibawah jalan layang) sedangkan yang terkecil yaitu sebesar 41,9 cm (solusi DGPS). Oleh karena itu bisa dikatakan semua koordinat hasil pengukuran mengalami pergeseran yang signifikan. Berdasarkan solusi tipe hasil pengukuran memiliki rata - rata nilai dX, dY, dLi dan HRMS pada tabel 4 sebagai berikut.
2 sampel dengan solusi DGPS tidak disertakan dalam perhitungan rata-rata karena posisi titik berada dibawah jalan layang yang dimungkinkan hasilnya dipengaruhi efek multipath. Dari hasil pengukuran yang didapatkan maka semua data pengukuran tersebut tidak memenuhi syarat untuk dilakukan uji-t one tail test. Hal ini dapat dilihat dari nilai dLi
terkecil yaitu 41,9 cm dimana nilai tersebut jauh lebih besar dari nilai
µ
osebesar 15 cm.Dari hasil pengukuran pada jarak 10 km(Waru) didapatkan bahwasannya terdapat perbedaan yang signifikan antara hasil pengukuran GPS CORS-RTK NTRIP dengan TS. Namun, karena data yang didapatkan bukan solusi tipe Fixed sehingga menyebabkan kualitas hasil pengukuran yang kurang baik, maka masih dimungkinkan untuk mendapatkan hasil yang lebih baik jika koneksi internet antara base station dan rover bisa lebih baik atau lancar.
Sedangkan pada penelitian yang dilakukan oleh Aries yang berjudul “Studi Titik Batas Bidang Tanah Menggunakan GPS CORS dengan Metode RTK-NTRIP, Studi kasus : Desa Banyuraden, Gamping, Kab. Sleman, DIY” Penelitian tersebut bertujuan untuk pembuatan peta bidang hasil pengukuran menggunakan GPS CORS-RTK NTRIP dan menentukan ada tidaknya perbedaan signifikan koordinat batas bidang tanah hasil pengukuran GPS CORS-RTKNTRIP yang dibandingkan dengan koordinat bidang tanah hasil pengukuran terestris yang diikatkan pada TDT orde-4. Beberapa hasil dari penelitian tersebut didapatkan perbedaan peta bidang tanah dengan skala 1:1000 yang dihasilkan dari pengukuran GPS CORS-RTK NTRIP dan pengukuran terestris pada daerah persawahan dengan nilai pergeseran lateral rata-rata untuk keseluruhan batas bidang untuk dE(Easting) = 0,239 m sedangkan untuk dN (Northing) = 0,227 m, dan juga dari data hasil pengukuran dinyatakan bahwa ada perbedaan signifikan antara hasil pengukuran GPS CORS-RTK NTRIP dengan pengukuran terestris yang diikatkan pada TDT orde-4 dengan
µ
osebesar 20 cm. Hasil perbedaan tersebut disebabkan karena perubahan posisi patok batas bidang tanah yang miring dan rusak.Oleh karena itu, penggunaan GPS CORS-RTK NTRIP tentunya harus memenuhi syarat dan kondisi area pengamatan dalam penggunaannya, seperti antena GPS harus terbebas pandangannya dari satelit, GPS rover dan base station harus saling terhubung untuk mengirim data koreksi, kondisi server yang stabil untuk streaming data koreksi, memperhatikan kesalahan-kesalahan yang mempengaruhi pengukuran GPS agar didapatkan hasil pengukuran yang maksimal.
IV. KESIMPULAN
Dari penelitian ini dapat diambil beberapa kesimpulan, yaitu : 1. Peta jalan hasil pengukuran menggunakan GPS CORS -
RTK NTRIP dan Total Station di lokasi penelitian ITS (1 km dari base station) mempunyai selisih rata – rata untuk dE (Easting)= 8,1 cm sedangkan untuk dN (Northing)= 7,5 cm. Sedangkan untuk lokasi penelitian Waru (10 km dari base station) memiliki selisih ratarata untuk dE= -78,8 cm sedangkan dN= -244,1 cm.
2. Setelah dilakukan pengolahan data dan uji statistik (one tail test) untuk lokasi penelitian 1 km dari base station menyatakan bahwa tidak terdapat perbedaan signifikan antara hasil pengukuran menggunakan GPS CORS - RTK NTRIP dengan TS. Sedangkan untuk lokasi penelitian 10
Tabel 4.
Rata-rata dX, dY, dLi dan HRMS
Jumlah Sampel dY (m) dX (m) dLi (m) HRMS (m) Solutions 26 -0.809 -0.451 0.976 0.532 FLOAT 3 -0.315 0.273 0.486 0.631 DGPS 16 -5.914 -1.430 6.086 1.032 SDGPS 1 -4.923 4.983 7.005 4.256 AUTONOMOUS
km, menyatakan terdapat perbedaan yang signifikan antara hasil pengukuran GPS CORS - RTK NTRIP dengan TS.
3. Penggunaan GPS CORS-RTK NTRIP sudah layak digunakan untuk pemetaan hingga skala 1:500 untuk lokasi yang berjarak 1 km dari base station dan untuk lokasi yang berjarak 10 km dari base station masih dapat dimungkinkan jika didapatkan solusi pengukuran fixed.
LAMPIRAN
Gambar 5. Peta jalan hasil pengukuran GPS CORS - RTK NTRIP lokasi penelitian ITS
Gambar 6. Peta jalan hasil pengukuran Total Station lokasi penelitian ITS
Gambar 7. Peta jalan hasil pengukuran GPS CORS - RTK NTRIP lokasi penelitian WARU
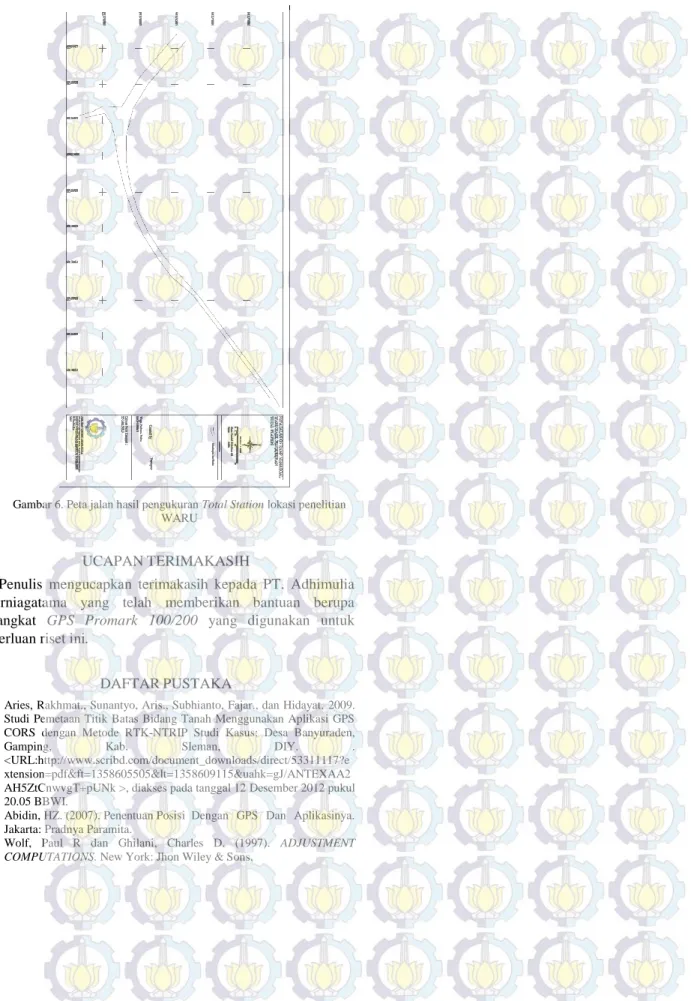
Gambar 6. Peta jalan hasil pengukuran Total Station lokasi penelitian WARU
UCAPANTERIMAKASIH
Penulis mengucapkan terimakasih kepada PT. Adhimulia Interniagatama yang telah memberikan bantuan berupa perangkat GPS Promark 100/200 yang digunakan untuk keperluan riset ini.
DAFTARPUSTAKA
[1] Aries, Rakhmat., Sunantyo, Aris., Subhianto, Fajar., dan Hidayat. 2009. Studi Pemetaan Titik Batas Bidang Tanah Menggunakan Aplikasi GPS CORS dengan Metode RTK-NTRIP Studi Kasus: Desa Banyuraden,
Gamping, Kab. Sleman, DIY. .
<URL:http://www.scribd.com/document_downloads/direct/53311117?e xtension=pdf&ft=1358605505<=1358609115&uahk=gJ/ANTEXAA2 AH5ZtCnwvgT+pUNk >, diakses pada tanggal 12 Desember 2012 pukul 20.05 BBWI.
[2] Abidin, HZ. (2007). Penentuan Posisi Dengan GPS Dan Aplikasinya. Jakarta: Pradnya Paramita.
[3] Wolf, Paul R dan Ghilani, Charles D. (1997). ADJUSTMENT COMPUTATIONS. New York: Jhon Wiley & Sons.