PERANCANGAN DAN IMPLEMENTASI KONTROLER
PID
INDEPENDENT
DAN METODE
DECOUPLING
PADA
GERAKAN LATERAL UAV (
UNMANNED AERIAL VEHICLE
)
UNTUK
TRACKING WAYPOINT
Dimaz Rosyid Ma’ruf - 2209 106 053
Jurusan Teknik Elektro-FTI, Institut Teknologi Sepuluh Nopember Kampus ITS, Keputih-Sukolilo, Surabaya-60111
Abstrak: Pada dekade terakhir Unmanned Aerial Vehicle (UAV) banyak diproyeksikan sebagai pengganti awak pilot untuk beberapa misi penerbangan. Dalam rangka memenuhi misi tersebut yang mengharuskan minimalisasi dari intervensi manusia, operasional UAV harus dapat dijalankan secara autonomous, dari level atas yaitu perencanaan gerak tracking waypoint, menuju level loop kontrol pada bagian dalam sistem. Pada level atas hierarki kontrol, algoritma perencanaan gerak tracking waypoint bertugas memberikan aksi gerak terbang UAV dari suatu posisi bebas menuju waypoint selanjutnya. Pada akhirnya algoritma tracking waypoint ini bertanggung jawab mengarahkan UAV menuju titik waypoint yang telah ditentukan sebelumnya mengikuti jalur terbang optimal antara waypoint tersebut.
Berbagai pendekatan kontrol telah banyak dikembangkan untuk mendapatkan solusi pada masalah tracking waypoint ini. Pada saat ini penulis melakukan penelitian Tugas Akhir menggunakan kontroler PID independent dan metode decoupling yang ditanamkan dalam mikrokontroler dan diujicobakan pada pesawat model RC. Dengan kombinasi kontroler PID dan decoupling diperoleh hasil simulasi UAV yang dapat mengikuti titik-titik waypoint-nya. Namun pada saat implementasi performa UAV belum dapat maksimal karena adanya faktor lain yang tidak dapat di kompensasi oleh kontroler.
Kata kunci: Unmanned Aerial Vehicle, Tracking Waypoint , Kontroler PID, Metode Decoupling
1. PENDAHULUAN
Pada dekade terakhir Unmanned Aerial Vehicle (UAV) banyak diproyeksikan sebagai pengganti pilot (yang biasa dilakukan oleh manusia) untuk beberapa misi penerbangan. Secara terpisah, UAV dalam skala kecil mendapatkan perhatian yang terus meningkat, baik dari institusi pendidikan, institusi riset dan institusi lainnya dikarenakan UAV ini dapat mengemban misi terbang untuk tujuan militer dan sipil.
Berbagai pendekatan kontrol telah banyak dikembangkan untuk mendapatkan solusi pada masalah tracking waypoint ini, antara lain: R.A. Sasongko, dkk. (2009) dengan pengembangan kontrol autonomous
menggunakan prinsip VOR-hold system (VOR adalah VHF Omni-directional Radio Range), John Osborne, dkk. (2005) dengan kontrol berdasarkan ‘good helmsman’ behaviour. Termotivasi dari metodologi yang dipaparkan oleh Niculescu (2001) tentang kontrol lateral pada UAV Aerosonde dan Sanghyo Lee, dkk. (2010) tentang integrasi waypoint path generation and following, penulis akan menerapkan kontrol PID yang akan dipadukan dengan metode decoupling.
Penelitian tugas akhir ini dilakukan berdasarkan suatu permasalahan, yaitu bagaimana merancang sebuah UAV dari pesawat model kemudian mengimplementasikan teori kontrol PID dan metode decoupling untuk mengarahkan UAV menuju waypoint yang telah ditentukan sesuai jalur terbang optimal antar waypoint.
Pemilihan kontrol PID, selain umum digunakan, mudah dipelajari dan diaplikasikan, sistem kontrol ini merupakan gabungan dari beberapa tipe kontroler, yaitu proportional, derivative dan integral sehingga dapat menggabungkan keunggulan masing-masing kontroler. Karena UAV adalah merupakan salah satu contoh sistem MIMO (Multiple Input Multiple Output), maka pemilihan metode decoupling diperlukan. Tujuannya adalah untuk menghilangkan intervensi kontrol yang dilakukan oleh kontroler lain, sehingga seakan-akan sistem UAV adalah sistem SISO (Single Input Single Output).
Sehingga tujuan pengerjaan tugas akhir ini adalah dapat merancang dan mengimplementasikan kontroler PID dan metode decoupling untuk digunakan sebagai kontrol dalam sistem autopilot UAV yaitu tracking waypoint pada gerakan lateralnya.
2. TINJAUAN PUSTAKA
2.1.Unmanned Aerial Vehicle (UAV)
UAV yang merupakan singkatan dari Unmanned Aerial Vehicle yang secara harfiah berarti kendaraan udara yang beroperasi tanpa manusia sebagai awaknya. UAV secara umum digunakan oleh kesatuan militer untuk memantau suatu situasi dimana penggunaan pesawat dengan awak sangat riskan.
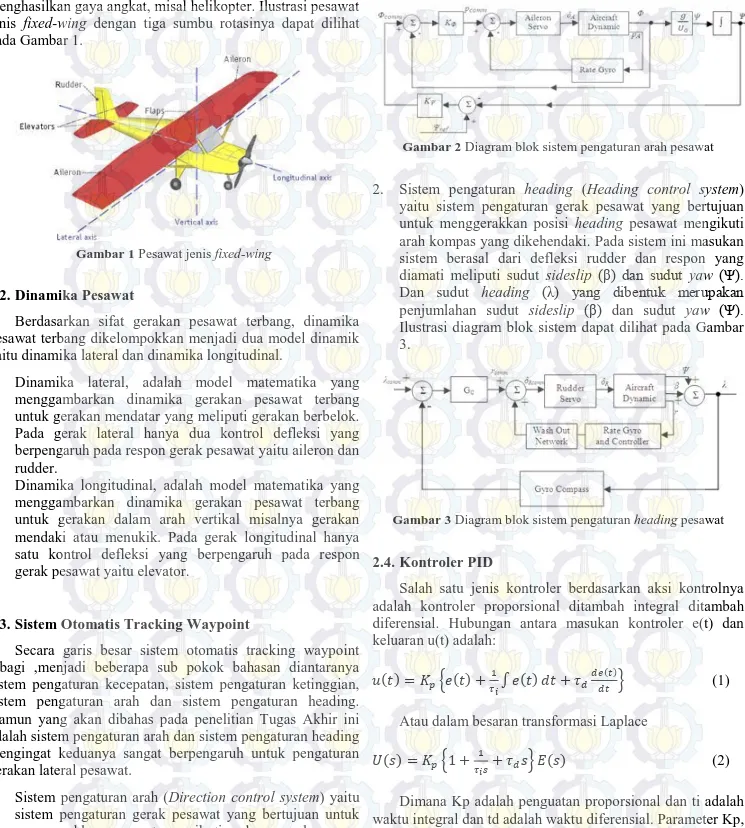
Berdasarkan bentuk sayap dan struktur badan, UAV dapat dikelompokkan menjadi dua jenis yaitu fixed-wing dan rotary-wing. Fixed-wing merupakan jenis pesawat yang memiiki bentuk sayap tetap, sedangkan rotary-wing
merupakan pesawat yang menggunakan baling-baling untuk menghasilkan gaya angkat, misal helikopter. Ilustrasi pesawat jenis fixed-wing dengan tiga sumbu rotasinya dapat dilihat pada Gambar 1.
Gambar 1 Pesawat jenis fixed-wing
2.2.Dinamika Pesawat
Berdasarkan sifat gerakan pesawat terbang, dinamika pesawat terbang dikelompokkan menjadi dua model dinamik yaitu dinamika lateral dan dinamika longitudinal.
1. Dinamika lateral, adalah model matematika yang menggambarkan dinamika gerakan pesawat terbang untuk gerakan mendatar yang meliputi gerakan berbelok. Pada gerak lateral hanya dua kontrol defleksi yang berpengaruh pada respon gerak pesawat yaitu aileron dan rudder.
2. Dinamika longitudinal, adalah model matematika yang menggambarkan dinamika gerakan pesawat terbang untuk gerakan dalam arah vertikal misalnya gerakan mendaki atau menukik. Pada gerak longitudinal hanya satu kontrol defleksi yang berpengaruh pada respon gerak pesawat yaitu elevator.
2.3.Sistem Otomatis Tracking Waypoint
Secara garis besar sistem otomatis tracking waypoint dibagi ,menjadi beberapa sub pokok bahasan diantaranya sistem pengaturan kecepatan, sistem pengaturan ketinggian, sistem pengaturan arah dan sistem pengaturan heading. Namun yang akan dibahas pada penelitian Tugas Akhir ini adalah sistem pengaturan arah dan sistem pengaturan heading mengingat keduanya sangat berpengaruh untuk pengaturan gerakan lateral pesawat.
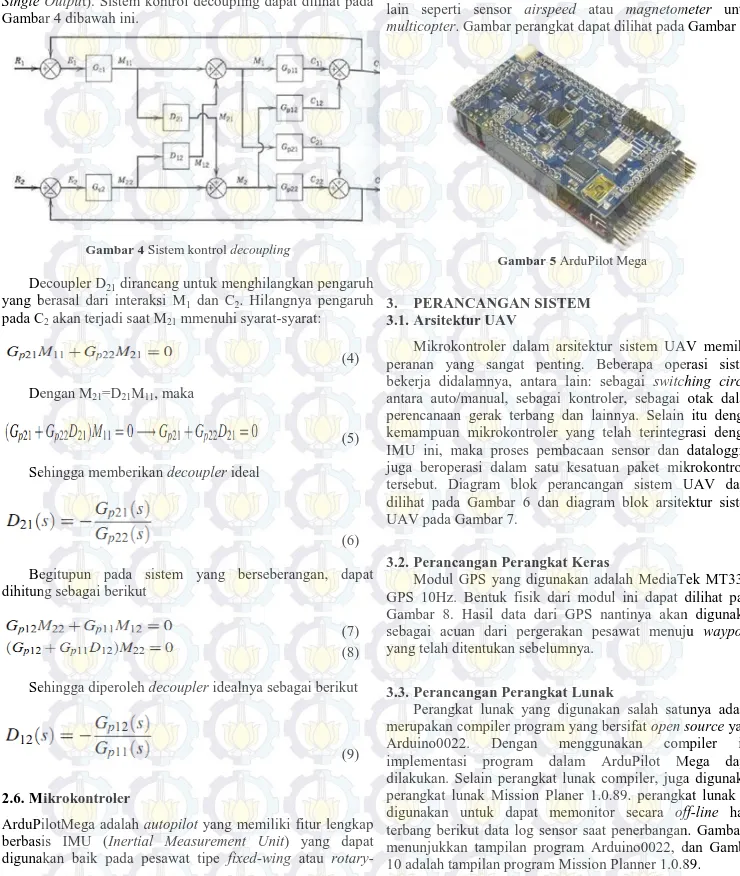
1. Sistem pengaturan arah (Direction control system) yaitu sistem pengaturan gerak pesawat yang bertujuan untuk menggerakkan pesawat mengikuti arah pergerakan yang telah ditentukan sebelumnya secara otomatis. Pada sistem ini masukan sistem berasal dari defleksi aileron (δA) dan respon yang diamati meliputi sudut roll (Φ) dan sudut yaw (Ψ). Sehingga arah yang dibentuk oleh pesawat merupakan gerakan koordinasi antara sudut roll (Φ) dan sudut yaw (Ψ). Ilustrasi diagram blok sistem dapat dilihat pada Gambar 2
Gambar 2 Diagram blok sistem pengaturan arah pesawat
2. Sistem pengaturan heading (Heading control system) yaitu sistem pengaturan gerak pesawat yang bertujuan untuk menggerakkan posisi heading pesawat mengikuti arah kompas yang dikehendaki. Pada sistem ini masukan sistem berasal dari defleksi rudder dan respon yang diamati meliputi sudut sideslip (β) dan sudut yaw (Ψ). Dan sudut heading (λ) yang dibentuk merupakan penjumlahan sudut sideslip (β) dan sudut yaw (Ψ). Ilustrasi diagram blok sistem dapat dilihat pada Gambar 3.
Gambar 3 Diagram blok sistem pengaturan heading pesawat
2.4.Kontroler PID
Salah satu jenis kontroler berdasarkan aksi kontrolnya adalah kontroler proporsional ditambah integral ditambah diferensial. Hubungan antara masukan kontroler e(t) dan keluaran u(t) adalah:
(1)
Atau dalam besaran transformasi Laplace
(2)
Dimana Kp adalah penguatan proporsional dan ti adalah waktu integral dan td adalah waktu diferensial. Parameter Kp, ti, dan td ketiganya dapat ditentukan. Sehingga fungsi alih kontroler proporsional ditambah integral ditambah diferensial adalah:
2.5.Metode Decoupling
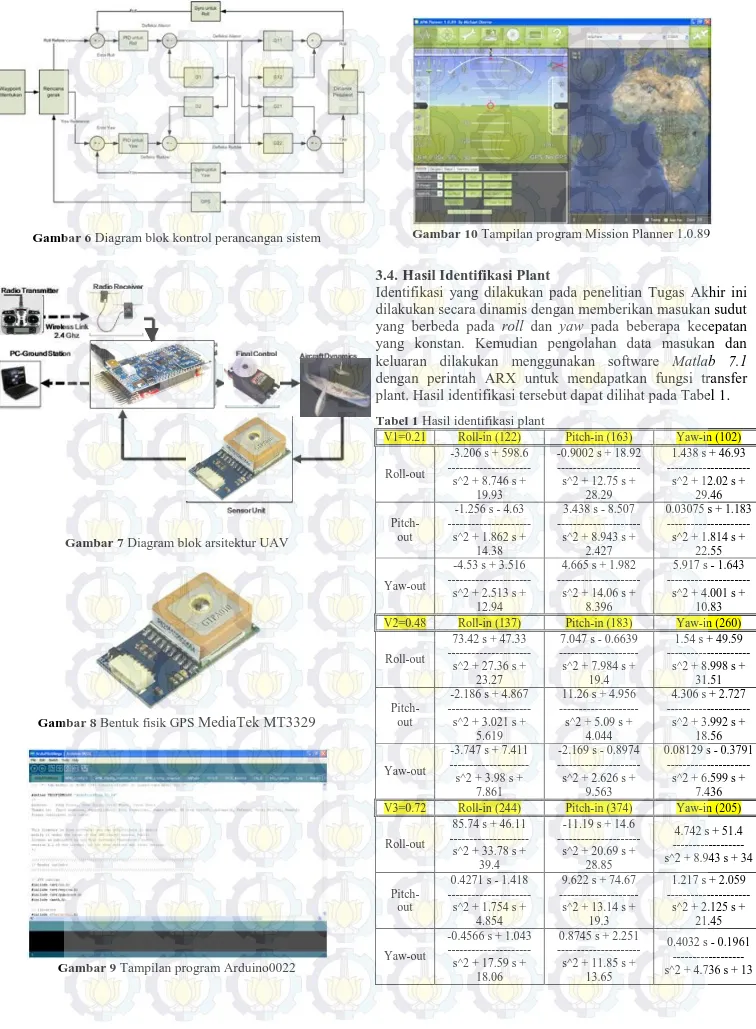
Metode decoupling adalah suatu metode untuk menghilangkan interaksi kontrol lain dari suatu sistem MIMO (Multiple Input Multiple Output), sehingga sistem tersebut seakan-akan bekerja sebagaimana sistem SISO (Single Input Single Output). Sistem kontrol decoupling dapat dilihat pada Gambar 4 dibawah ini.
Gambar 4 Sistem kontrol decoupling
Decoupler D21 dirancang untuk menghilangkan pengaruh
yang berasal dari interaksi M1 dan C2. Hilangnya pengaruh
pada C2 akan terjadi saat M21 mmenuhi syarat-syarat:
(4)
Dengan M21=D21M11, maka
(5)
Sehingga memberikan decoupler ideal
(6)
Begitupun pada sistem yang berseberangan, dapat dihitung sebagai berikut
(7) (8)
Sehingga diperoleh decoupler idealnya sebagai berikut
(9)
2.6.Mikrokontroler
ArduPilotMega adalah autopilot yang memiliki fitur lengkap berbasis IMU (Inertial Measurement Unit) yang dapat digunakan baik pada pesawat tipe fixed-wing atau
rotary-wing, termasuk quadcopter dan tipe multicopter lain serta helikopter konvensional. Perangkat keras autopilot akan tetap sama untuk semua tipe pesawat dan dibedakan berdasarkan firmware yang ditanamkan sesuai dengan tipe pesawat yang digunakan via Mission Planner. Untuk meningkatkan performa pesawat secara spesfifik, dapat ditambahkan sensor lain seperti sensor airspeed atau magnetometer untuk multicopter.Gambar perangkat dapat dilihat pada Gambar 5.
Gambar 5 ArduPilot Mega
3. PERANCANGAN SISTEM 3.1.Arsitektur UAV
Mikrokontroler dalam arsitektur sistem UAV memiliki peranan yang sangat penting. Beberapa operasi sistem bekerja didalamnya, antara lain: sebagai switching circuit antara auto/manual, sebagai kontroler, sebagai otak dalam perencanaan gerak terbang dan lainnya. Selain itu dengan kemampuan mikrokontroler yang telah terintegrasi dengan IMU ini, maka proses pembacaan sensor dan datalogging juga beroperasi dalam satu kesatuan paket mikrokontroler tersebut. Diagram blok perancangan sistem UAV dapat dilihat pada Gambar 6 dan diagram blok arsitektur sistem UAV pada Gambar 7.
3.2.Perancangan Perangkat Keras
Modul GPS yang digunakan adalah MediaTek MT3329 GPS 10Hz. Bentuk fisik dari modul ini dapat dilihat pada Gambar 8. Hasil data dari GPS nantinya akan digunakan sebagai acuan dari pergerakan pesawat menuju waypoint yang telah ditentukan sebelumnya.
3.3.Perancangan Perangkat Lunak
Perangkat lunak yang digunakan salah satunya adalah merupakan compiler program yang bersifat open source yaitu Arduino0022. Dengan menggunakan compiler ini, implementasi program dalam ArduPilot Mega dapat dilakukan. Selain perangkat lunak compiler, juga digunakan perangkat lunak Mission Planer 1.0.89. perangkat lunak ini digunakan untuk dapat memonitor secara off-line hasil terbang berikut data log sensor saat penerbangan. Gambar 9 menunjukkan tampilan program Arduino0022, dan Gambar 10 adalah tampilan program Mission Planner 1.0.89.
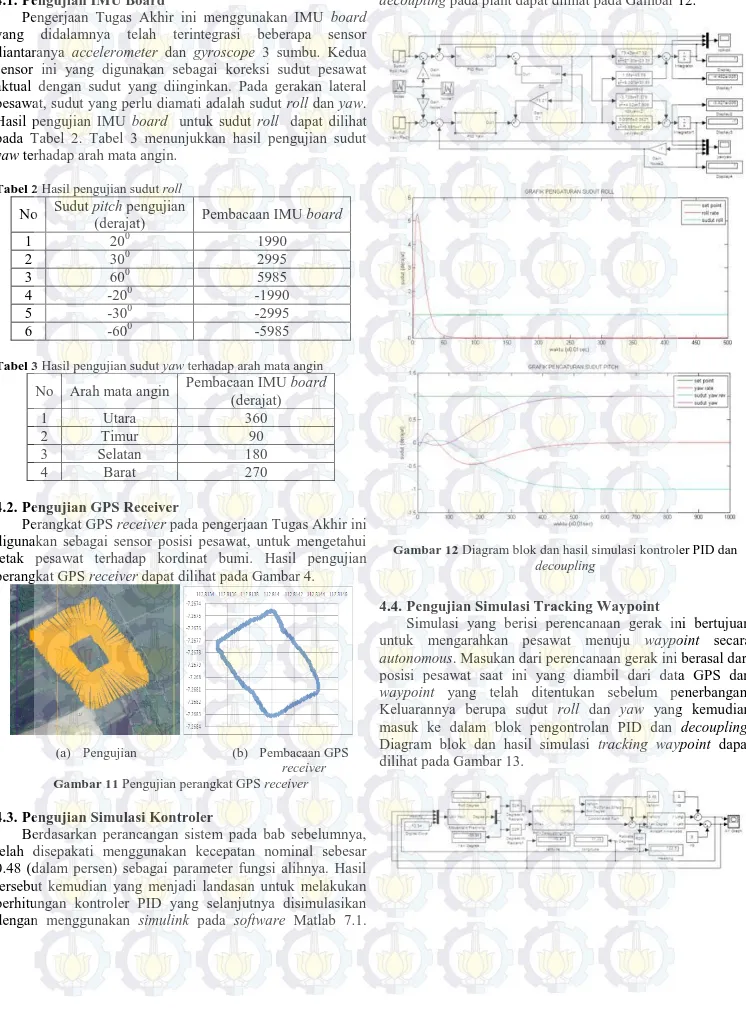
Gambar 6 Diagram blok kontrol perancangan sistem
Gambar 7 Diagram blok arsitektur UAV
Gambar 8 Bentuk fisik GPS MediaTek MT3329
Gambar 9 Tampilan program Arduino0022
Gambar 10 Tampilan program Mission Planner 1.0.89
3.4.Hasil Identifikasi Plant
Identifikasi yang dilakukan pada penelitian Tugas Akhir ini dilakukan secara dinamis dengan memberikan masukan sudut yang berbeda pada roll dan yaw pada beberapa kecepatan yang konstan. Kemudian pengolahan data masukan dan keluaran dilakukan menggunakan software Matlab 7.1 dengan perintah ARX untuk mendapatkan fungsi transfer plant. Hasil identifikasi tersebut dapat dilihat pada Tabel 1. Tabel 1 Hasil identifikasi plant
V1=0.21 Roll-in (122) Pitch-in (163) Yaw-in (102)
Roll-out -3.206 s + 598.6 --- s^2 + 8.746 s + 19.93 -0.9002 s + 18.92 --- s^2 + 12.75 s + 28.29 1.438 s + 46.93 --- s^2 + 12.02 s + 29.46 Pitch-out -1.256 s - 4.63 --- s^2 + 1.862 s + 14.38 3.438 s - 8.507 --- s^2 + 8.943 s + 2.427 0.03075 s + 1.183 --- s^2 + 1.814 s + 22.55 Yaw-out -4.53 s + 3.516 --- s^2 + 2.513 s + 12.94 4.665 s + 1.982 --- s^2 + 14.06 s + 8.396 5.917 s - 1.643 --- s^2 + 4.001 s + 10.83
V2=0.48 Roll-in (137) Pitch-in (183) Yaw-in (260)
Roll-out 73.42 s + 47.33 --- s^2 + 27.36 s + 23.27 7.047 s - 0.6639 --- s^2 + 7.984 s + 19.4 1.54 s + 49.59 --- s^2 + 8.998 s + 31.51 Pitch-out -2.186 s + 4.867 --- s^2 + 3.021 s + 5.619 11.26 s + 4.956 --- s^2 + 5.09 s + 4.044 4.306 s + 2.727 --- s^2 + 3.992 s + 18.56 Yaw-out -3.747 s + 7.411 --- s^2 + 3.98 s + 7.861 -2.169 s - 0.8974 --- s^2 + 2.626 s + 9.563 0.08129 s - 0.3791 --- s^2 + 6.599 s + 7.436
V3=0.72 Roll-in (244) Pitch-in (374) Yaw-in (205)
Roll-out 85.74 s + 46.11 --- s^2 + 33.78 s + 39.4 -11.19 s + 14.6 --- s^2 + 20.69 s + 28.85 4.742 s + 51.4 --- s^2 + 8.943 s + 34 Pitch-out 0.4271 s - 1.418 --- s^2 + 1.754 s + 4.854 9.622 s + 74.67 --- s^2 + 13.14 s + 19.3 1.217 s + 2.059 --- s^2 + 2.125 s + 21.45 Yaw-out -0.4566 s + 1.043 --- s^2 + 17.59 s + 18.06 0.8745 s + 2.251 --- s^2 + 11.85 s + 13.65 0.4032 s - 0.1961 --- s^2 + 4.736 s + 13
4. PENGUJIAN DAN ANALISA 4.1.Pengujian IMU Board
Pengerjaan Tugas Akhir ini menggunakan IMU board yang didalamnya telah terintegrasi beberapa sensor diantaranya accelerometer dan gyroscope 3 sumbu. Kedua sensor ini yang digunakan sebagai koreksi sudut pesawat aktual dengan sudut yang diinginkan. Pada gerakan lateral pesawat, sudut yang perlu diamati adalah sudut roll dan yaw. Hasil pengujian IMU board untuk sudut roll dapat dilihat pada Tabel 2. Tabel 3 menunjukkan hasil pengujian sudut yaw terhadap arah mata angin.
Tabel 2 Hasil pengujian sudut roll
No Sudut pitch pengujian
(derajat) Pembacaan IMU board
1 200 1990 2 300 2995 3 600 5985 4 -200 -1990 5 -300 -2995 6 -600 -5985
Tabel 3 Hasil pengujian sudut yaw terhadap arah mata angin
No Arah mata angin Pembacaan IMU board (derajat) 1 Utara 360 2 Timur 90 3 Selatan 180 4 Barat 270 4.2.Pengujian GPS Receiver
Perangkat GPS receiver pada pengerjaan Tugas Akhir ini digunakan sebagai sensor posisi pesawat, untuk mengetahui letak pesawat terhadap kordinat bumi. Hasil pengujian perangkat GPS receiver dapat dilihat pada Gambar 4.
(a) Pengujian (b) Pembacaan GPS
receiver
Gambar 11 Pengujian perangkat GPS receiver
4.3.Pengujian Simulasi Kontroler
Berdasarkan perancangan sistem pada bab sebelumnya, telah disepakati menggunakan kecepatan nominal sebesar 0.48 (dalam persen) sebagai parameter fungsi alihnya. Hasil tersebut kemudian yang menjadi landasan untuk melakukan perhitungan kontroler PID yang selanjutnya disimulasikan dengan menggunakan simulink pada software Matlab 7.1.
Diagram blok dan hasil simulasi kontroler PID dan decoupling pada plant dapat dilihat pada Gambar 12.
Gambar 12 Diagram blok dan hasil simulasi kontroler PID dan
decoupling
4.4.Pengujian Simulasi Tracking Waypoint
Simulasi yang berisi perencanaan gerak ini bertujuan untuk mengarahkan pesawat menuju waypoint secara autonomous. Masukan dari perencanaan gerak ini berasal dari posisi pesawat saat ini yang diambil dari data GPS dan waypoint yang telah ditentukan sebelum penerbangan. Keluarannya berupa sudut roll dan yaw yang kemudian masuk ke dalam blok pengontrolan PID dan decoupling. Diagram blok dan hasil simulasi tracking waypoint dapat dilihat pada Gambar 13.
Gambar 13 Diagram blok dan hasil simulasi tracking waypoint
4.5.Pengujian Implementasi Tracking Waypoint
Implementasi sistem dilakukan dengan memberikan masukan empat waypoint. Yaitu [-7.26746 112.814; -7.26771 112.8134; -7.26831 112.814, -7.26811 112.8144]. Hasil implementasi kontroler pada pesawat dapat dilihat pada Gambar 14.
Gambar 14 Hasil implementasi kontroler
Proses auto tracking waypoint dapat langsung terjadi pada saat program auto dieksekusi, namun sebelum mencapai titik waypoint kedua, program auto di non-aktifkan, dikarenakan gangguan angin yang terlalu besar. Disamping itu dengan gangguan sebesar itu kontroler dipastikan tidak dapat mengkompensasi pergerakan pesawat. 5. PENUTUP
Dari penelitian yang dilakukan pada saat pengerjaan Tugas Akhir ini, maka dapat diambil beberapa kesimpulan, antara lain:
1. Kontroler PID dan metode decoupling dapat diterapkan pada sistem UAV yang kompleks dengan melalui pendekatan sistem SISO (Single Input Single Output) hal ini ditunjukkan dengan simulasi yang telah dilakukan memberikan respon yang baik ketika sistem diberikan kontroler.
2. Identifikasi menjadi hal yang sangat kritikal dalam melakukan pemodelan plant, oleh karena itu diperlukan perhatian yang besar dalam pengambilan data tersebut. 3. Proses pada simulasi tracking waypoint belum dapat
mewakili performa pesawat saat implementasi, karena saat implementasi terdapat variable lain semisal kecepatan angin yang berubah-ubah yang tidak diperhitungkan pada saat proses simulasi
DAFTAR PUSTAKA
S. Kanowitz, M. Nechyba, dan A. Arroyo. 2001. “Design And Implementation of a GPS-based Navigation System for Micro Air Vehicles” Thesis, Electrical and Computer Engineering, University of Florida.
H. Chao, Y. Cao, dan Y. Chen . 2007.” Autopilots for Small Fixed-Wing Unmanned Air Vehicles: A Survey,” Proc. IEEE Mechatronics and Automation, vol. 25, no.8, pp 3144-3149.
McLean, D. 1990. Automatic Flight Control Systems. Prentice Hall, Hertfordshire,UK.
D. Kingston1, R. Beard, T. McLain, M. Larsen, dan W. Ren. 2003.” Autonomous Vehicle Technologies For Small Fixed Wing UAVs”, American Institute of Aeronautics and Astronautic.
K. J. Astrom & T. Hagglund, 1995. PID Controllers: Theory, Design, and Tuning. Research Triangle Park, NC : Instrument Society of America.
DAFTAR RIWAYAT HIDUP
Penulis dilahirkan di Surabaya, 10 Maret 1987, merupakan anak kedua dari 3 bersaudara. Penulis telah menempuh pendidikan formal yaitu di TK ABA 2 Surabaya, SD Muhammadiyah 6 Surabaya, SLTPN 1 Besuki Tulungagung dan SMAN 2 Jombang. Setelah lulus dari SMA tahun 2004, Penulis melanjutkan jenjang pendidikan Diploma 3 di Politeknik Manufaktur Negeri Bandung konsentrasi Teknik Otomasi Manufaktur dan Mekatronika. Penulis sempat bekerja di PT. Schneider Electric Manufacturing Batam selama 2007-2009 sebelum melanjutkan jenjang pendidikan program Lintas Jalur S1 di Teknik Elektro FTI-ITS pada tahun 2009 dan terdaftar dengan NRP. 2209106053.