elevator design
Bebas
119
0
0
Teks penuh
(2) RANCANG BANGUN SISTEM PENGGERAK HOME LIFT. TUGAS AKHIR Sebagai salah satu syarat untuk memperoleh gelar SarjanaTeknik dari Universitas Katolik Indonesia Atma Jaya. Oleh: HOT BELFRAN LBN BINANGA SINURAT 2007 – 041 – 057. PROGRAM STUDI TEKNIK MESIN FAKULTAS TEKNIK UNIVERSITAS KATOLIK INDONESIA ATMA JAYA 2011.
(3) FR-UAJ-07-46/R0. UNIVERSITAS KATOLIK INDONESIA. FORMULIR PENGESAHAN TUGAS AKHIR. LEMBAR PENGESAHAN Yang bertanda Tangan dibawah ini menyatakan bahwa Mahasiswa: Nama. : Hot Belfran LBN Binanga Sinurat. NIM. : 2007-041-057. Judul Tugas Akhir. : Rancang Bangun Sistem Penggerak Home Lift. Tanggal Ujian. : 11 November 2011. Telah dinyatakan lulus ujian mata kuliah Tugas Akhir dan Buku Tugas Akhir tersebut telah diperbaiki, diperiksa dan disetujui oleh dosen pembimbing tugas akhir. Jakarta, Mengetahui : Ketua Jurusan. Menyetujui. Dosen Pembimbing Tugas Akhir,. (....................................................). (Ir. Isdaryanto Iskandar, M.Sc).
(4) FR-UAJ-10-17/R0. LEMBAR PERNYATAAN PERSETUJUAN PUBLIKASI KARYA ILMIAH UNTUK KEPENTINGAN AKADEMIS Sebagai sivitas akademik Universitas Katolik Indonesia Atma Jaya, saya yang bertanda tangan di bawah ini: Nama : Hot Belfran LBN Binanga Sinurat NPM/NIP : 2007-041-057 Program Studi : Teknik Mesin Fakultas : Teknik Jenis karya : Skripsi/tugas akhir/tesis/disertasi/ laporan penelitian/makalah/ menyatakan bahwa demi pengembangan ilmu pengetahuan, menyetujui untuk memberikan kepada Universitas Katolik Indonesia Atma Jaya hak menyimpan, mengalih-media/format, mengelolanya dalam bentuk pangkalan data (database), mendistribusikannya, dan menampilkan/mempublikasikannya di internet atau media lain untuk kepentingan akademis tanpa perlu meminta ijin dari saya selama tetap mencantumkan nama saya sebagai penulis/pencipta dan sebagai pemilik Hak Cipta atas karya ilmiah saya berjudul: Rancang Bangun Sistem Penggerak Home Lift Segala tuntutan hukum yang timbul atas pelanggaran Hak Cipta dalam karya ilmiah ini menjadi tanggungjawab saya pribadi. Demikian pernyataan ini saya buat dengan sebenarnya. Dibuat di : Jakarta Pada tanggal : 17 Oktober 2011 Yang menyatakan. ( Hot Belfran LBN Binanga Sinurat ).
(5) UNIVERSITAS KATOLIK INDONESIA. FR-UAJ-07-47/R0. FORMULIR PERNYATAAN KEASLIAN TUGAS AKHIR. LEMBAR PERNYATAAN Yang bertanda tangan di bawah ini mahasiswa : Nama. : Hot Belfran LBN Binanga Sinurat. NIM. : 2007-041-057. Judul Tugas Akhir. : Rancang Bangun Sistem Penggerak Home Lift. Menyatakan bahwa Tugas Akhir ini adalah hasil karya sendiri dan bukan merupakan duplikasi sebagaian atau seluruhnya dari karya orang lain yang sudah pernah dipublikasikan atau yang sudah pernah dipakai untuk mendapatkan gelar di Universitas lain, kecuali pada bagian dimana sumber informasi dicantumkan dengan cara referensi yang semestinya.. Pernyataan ini dibuat dengan sebenar-benarnya secara sadar dan bertanggung jawab dan Saya bersedia menerima sanksi berupa pembatalan Tugas Akhir Saya apabila terbukti melakukan duplikasi terhadap Tugas Akhir yang sudah ada. Jakarta, 17 Oktober 2011 Meterai Rp 6000,-. (Hot Belfran LBN Binanga Sinurat).
(6) ABSTRAK Pada saat ini banyak konstruksi kabin “lift” dibuat seberat mungkin untuk mengatasi terjadinya slip pada sistem penggerak lift. Pada “home lift” sistem penggeraknya menggunakan “winding drum” tetapi membutuhkan motor dengan daya yang besar dan biaya yang besar juga. Dalam tugas akhir ini dirancang suatu sistem pengangkat baru pada “home lift” dengan menggunakan beban penyeimbang sehingga dapat mengurangi daya keluaran motor dan mengurangi biaya pemakaian listrik. Rancangan sistem pengangkat ini dapat mengurangi daya motor yang digunakan dan mengurangi biaya listrik adalah dengan melilitkan tali baja pada “traction sheave”. Alat ini dilengkapi dengan mikrokontroller sehingga sistem ini bisa bergerak dan mampu menggerakkan kabin “lift” dan beban penyeimbang. Kata kunci: sistem pengangkat home lift, desain traction sheave. iii.
(7) ABSTRACT. Nowday, lift cabin was made more severe to overcome slip at elevator drive system. For drive system, home elevator uses winding drum type but the shortage of this system is require big power and too much cost of electricity. In this mini thesis will be designed a new drive system for home elevator with add counterweight, so this system can decrease power and decrease cost of electricity. This drive system can reduce big power and reduce cost of electricity with wrap the sling at traction sheave. This appliance is equipped with a control mechanism with a microcontroller, so this system can move and able to move the cabin elevator and counterweight. Keywords: drive system home lift, traction sheave design. iv.
(8) KATA PENGANTAR. Puji syukur ke Hadirat Tuhan Yang Maha Esa karena rahmat dan kasih-Nya sehingga penulis dapat menyelesaikan tugas akhir dengan judul Rancang Bangun Sistem Penggerak Home Lift. Adapun tugas akhir ini merupakan syarat yang ditetapkan Fakultas Teknik Jurusan Mesin Unika Atma Jaya Jakarta untuk memperoleh gelar sarjana teknik. Penulis sadar banyak mendapatkan bantuan dalam penyusunan tugas akhir ini. Oleh karena itu pada kesempatan kali ini penulis ingin mengucapkan terima kasih kepada : 1. Kedua Orang Tua dan Adik-Adik saya yang tercinta yang telah memberikan segala bentuk kasih sayang dan dukungan baik secara moril maupun materiil. 2. Bapak Ir. Isdaryanto Iskandar, M.Sc., selaku dosen pembimbing Tugas Akhir atas segala masukan, bimbingan dan pengarahan selama proses pembuatan Tugas Akhir. 3. Bapak Ir. Markus Makdin Sinaga, M.Sc., selaku penasehat akademik atas segala bentuk pengarahan selama proses belajar di Unika Atma Jaya Jakarta. 4. Bapak Ir. Sarwono Kusasi, selaku Consultant Engineers di bidang elevator atas segala bentuk informasi selama proses pembuatan Tugas Akhir. 5. Bapak Ir. Suhendar, selaku Manager Installation di PT. MITSUBISHI JAYA atas segala bentuk informasi selama proses pembuatan Tugas Akhir.. v.
(9) 6. Riky Sutrisno sebagai rekan seperjuangan dalam proses pembuatan Tugas Akhir. 7. Harini Febrina karena selalu menemani dan memberikan dukungan selama proses pengerjaan Tugas Akhir. 8. Rekan-Rekan Workshop Mesin, Junang Tumanggor S.T., Aryo Yuwono S.T., Elbert Sukandar S.T., Cornelius S.T., Aldebaran S.T., Nanda Wenik S.T., Jerry S.T., Clemen S.T., Nikodemus S.T., Dharma Panggupito S.T., Maradu S.T., Rudi S.T., Novianto, Mario Pratomo S.T., Aryodewo S.T., Leo, Win, Robby, Evan, Toni, Muliyadi, Adi, Gunandri, Vicky, Doni, dan seluruh rekan-rekan Workshop Mesin yang tidak bisa disebutkan satu per satu. 9. Rekan-rekan Fakultas Teknik Mesin angkatan 2007 yang telah memberikan dorongan serta menemani penulis dalam suka maupun duka selama kuliah di Unika Atma Jaya maupun dalam penyelesaian Tugas Akhir ini. Penulis menyadari bahwa tugas akhir ini masih sangat jauh dari sempurna, oleh karena itu penulis akan sangat senang menerima kritik dan saran yang bersifat membangun dari tugas akhir ini.. Jakarta, 13 Oktober 2011 Penulis,. Hot Belfran. vi.
(10) DAFTAR ISI. JUDUL LEMBAR PENGESAHAN LEMBAR PERNYATAAN ABSTRAK. iii. ABSTRACT. iv. KATA PENGANTAR. v. DAFTAR ISI. vii. DAFTAR TABEL. xii. DAFTAR GAMBAR. xiii. DAFTAR ISTILAH. xv. DAFTAR LAMPIRAN BAB 1. BAB 2. xvii. PENDAHULUAN. 1. 1.1. Latar Belakang. 1. 1.2. Rumusan Masalah. 2. 1.3. Tujuan. 2. 1.4. Batasan Masalah. 2. 1.5. Manfaat Perancangan. 3. 1.6. Sistematika Penulisan. 3. TINJAUAN PUSTAKA. 5. 2.1. Pesawat Lift. 5. 2.2. Tali Baja. 7. vii.
(11) 2.2.1 Perhitungan Daya (Kekuatan Batas Kelelahan) Tali Kawat Baja dengan Metode Professor Zhitkov 2.3. 2.4. 2.5. 2.6. BAB 3. 19. Puli dan Drum. 21. 2.3.1 Puli. 21. 2.3.2 Drum. 22. Keseimbangan. 27. 2.4.1 Pengertian. 27. 2.4.2 Manfaat. 28. 2.4.3 Pelaksanaan Lapangan. 29. Tarikan dan Slip. 30. 2.5.1 Gaya Gesek. 30. 2.5.2 Hubungan Traksi. 31. 2.5.3 Batas Slip Dinamis. 33. Efisiensi dan Daya. 34. 2.6.1 Pengertian. 34. 2.6.2 Efisiensi. 34. 2.6.3 Daya atau Output. 35. PERANCANGAN SISTEM. 37. 3.1. Pokok Bahasan. 37. 3.2. Penjabaran Tugas. 37. 3.3. Struktur Fungsi. 39. 3.3.1 Struktur Fungsi Keseluruhan. 39. 3.3.2 Sub Struktur Fungsi. 39. viii.
(12) 3.4. 3.5. 3.6 BAB 4. Prinsip Solusi Untuk Sub Fungsi. 40. 3.4.1 Kombinasi Prinsip Solusi. 41. 3.4.2 Pemilihan Varian Terbaik. 46. Perancangan Wujud. 48. 3.5.1 Prinsip Kerja Alat. 48. 3.5.2 Rancangan Tata Letak dan Bentuk. 49. 3.5.3 Perancangan Detil. 50. Perwujudan Alat. 55. PERHITUNGAN SISTEM. 59. 4.1. Pembuktian Slip Pada Home Lift. 59. 4.1.1 Perhitungan Hubungan Traksi. 59. 4.1.1.1 Perhitungan Sistem Traksi Winding Drum Type. 60. 4.1.1.1.1 Kondisi Kabin Lift Lebih Berat Dibandingkan Beban Penyeimbang. 60. 4.1.1.1.2 Kondisi Beban Penyeimbang Lebih Berat Dibandingkan Kabin Lift. 64. 4.1.1.2 Pembuktian Sistem Traksi Menggunakan Sistem Penggerak Baru. 67. 4.1.1.2.1 Kondisi Kabin Lift Lebih Berat Dibandingkan Beban Penyeimbang. 67. 4.1.1.2.2 Kondisi Beban Penyeimbang Lebih Berat Dibandingkan Kabin Lift. ix. 70.
(13) 4.2. 4.3. 4.3. Biaya Listrik. 73. 4.2.1 Daya Keluaran Motor. 73. 4.2.2 Biaya Listrik. 75. Biaya Listrik. 69. 4.3.1 Daya Keluaran Motor. 73. 4.3.2 Biaya Listrik. 75. Perancangan Sistem Penggerak Lift yang Baru. 75. 4.4.1 Diameter Tali Baja. 75. 4.4.2 Tarikan Kerja Maksimum Pada Tali Baja. 76. 4.4.3 Luas Penampang Tali Baja. 76. 4.4.4 Kekuatan Putus Tali. 77. 4.4.5 Nilai Beban Putus Pada Tali. 78. 4.4.6 Perhitungan Diameter Drum. 78. 4.4.7 Jumlah Lilitan Pada Tiap Sisi Drum. 79. 4.4.8 Tebal Dinding Drum yang Digunakan. 80. 4.4.9 Perhitungan Panjang Total Drum. 80. 4.4.10 Pengujian Tegangan Tekan. 81. 4.4.11 Mesin Traksi yang Digunakan. 81. 4.4.12 Perhitungan dan Perancangan Pada Poros Bertingkat. 83. 4.4.12.1. Menghitung Diameter Poros Kecil 83. 4.4.12.2. Menghitung Diameter Poros Besar85. 4.4.12.3. Total Berat yang Menimpa Poros 87. x.
(14) BAB 5. 4.4.12.4. Gaya yang Bekerja Pada Poros. 4.4.12.5. Distribusi Gaya Merata Pada. 88. Poros. 88. 4.4.12.6. Reaksi Tumpuan. 88. 4.4.12.7. Diagram Momen Lentur. 90. 4.4.12.8. Diagram Gaya Geser. 91. 4.4.13 Perencanaan Bearing Pada Poros. 91. 4.4.14 Biaya Listrik yang Digunakan. 92. 4.4.14.1. Daya Keluaran Motor. 93. 4.4.14.2. Biaya Listrik. 94. KESIMPULAN DAN SARAN. 95. 5.1. Kesimpulan. 95. 5.2. Saran. 96. DAFTAR PUSTAKA LAMPIRAN A. xviii. DESAIN SISTEM PENGGERAK HOME LIFT. A-1. B. GAMBAR TEKNIK POROS BERTINGKAT. B-1. C. GAMBAR TEKNIK TRACTION SHEAVE. C-1. D. GAMBAR TEKNIK DEFLECTION SHEAVE. D-1. E. GAMBAR TEKNIK BEARING PADA POROS BERTINGKAT. E-1. xi.
(15) DAFTAR GAMBAR. Gambar 2.1.. Wire rope components. 9. Gambar 2.2.. Tali baja 8 x 19. 9. Gambar 2.3. Types of lay. 12. Gambar 2.4. Konstruksi Tali Baja. 14. Gambar 2.5. Dimensi Alur Drum. 23. Gambar 2.6. Posisi T1 dan T2. 32. Gambar 3.1. Struktur Fungsi Keseluruhan. 39. Gambar 3.2. Struktur Sub Fungsi. 40. Gambar 3.3. Desain Sistem Penggerak Home Lift. 47. Gambar 3.4. Motor Home Lift yang digunakan. 48. Gambar 3.5. Desain traction sheave. 48. Gambar 3.6. Desain Poros Bertingkat. 49. Gambar 3.7. Desain Bearing. 50. Gambar 3.8. Desain mur. 50. Gambar 3.9. Desain deflection sheave. 51. Gambar 3.10 Desain tali baja. 52. Gambar 3.11 Desain beban penyeimbang. 52. Gambar 3.11 Rangka utama. 53. Gambar 3.12 Sistem penggerak. 54. Gambar 3.13 Pillow Block pada deflection sheave. 55. Gambar 3.14 Pillow Block pada Traction Sheave. 55. xiii.
(16) Gambar 3.15 Posisi Beban penyeimbang. 56. Gambar 3.16 Kabin Lift. 57. Gambar 3.17 Diagram alir perancangan. 58. Gambar 4.1. Desain Sistem Penggerak Home Lift. 59. Gambar 4.2. Kabin lift lebih berat dibandingkan dengan beban penyeimbang 61. Gambar 4.3. Beban Penyeimbang Lebih Berat Dibandingkan Dengan Kabin Lift. 64. Gambar 4.4. Dimensi Motor yang Digunakan. 82. Gambar 4.5. Desain Poros Bertingkat. 86. Gambar 4.6. DBB poros bertingkat. 87. Gambar 4.7. Tata Ulang Gaya yang bekerja pada poros. 89. Gambar 4.8. Diagram momen lentur. 90. Gambar 4.9. Diagram gaya geser. 91. Gambar 4.10 Bearing Pada Poros Bertingkat. xiv. 92.
(17) DAFTAR TABEL. Tabel 2.1.. Batas Patah Tali Baja Tarik 8 x 19. 10. Tabel 2.2.. Jumlah Lengkungan. 16. Tabel 2.3. Dimensi Alur Drum. 23. Tabel 3.1. Spesifikasi Rancangan. 38. Tabel 3.2. Prinsip Solusi Sub Fungsi. 41. Tabel 3.3. Kombinasi Prinsip Solusi Sub Fungsi Varian 1. 42. Tabel 3.4. Kombinasi Prinsip Solusi Sub Fungsi Varian 2. 43. Tabel 3.3. Kombinasi Prinsip Solusi Sub Fungsi Varian 3. 44. Tabel 3.3. Matriks Solusi Sub Fungsi. 45. Tabel 3.7. Pemilihan Solusi Terbaik. 47. xii.
(18) BAB 1 PENDAHULUAN. 1.1. Latar Belakang Pesawat pengangkat merupakan perangkat yang digunakan untuk membantu. manusia dalam melakukan suatu pekerjaan. Pesawat pengangkat banyak digunakan untuk memindahkan muatan di suatu lokasi atau area seperti pabrik, lokasi konstruksi, tempat penyimpanan dan pembongkaran muatan, dsb. Lift ditujukan khusus untuk mengangkat barang dan penumpang secara vertikal didalam sangkar yang bergerak pada rel penuntun tetap. Lift banyak digunakan pada industri, gedung bertingkat, toserba dan rumah tinggal. Lift diklasifikasikan menjadi lift untuk penumpang dan elevator untuk barang. Jenis penggerak yang digunakan untuk lift adalah lift elektrik, hidrolik, dan yang dioperasikan dengan tangan (N. Rudenko, 1996). Lift elektrik menggunakan kemampun tarik (traction ability) dari mesin yang mengandalkan gaya gesekan antara tali baja dengan roda puli (traction sheave) untuk menggerakkan sangkar elevator. Sistem pergerakan ini disebut juga dengan traction system dimana pergerakan elevator bergantung pada gesekan (traction) antara tali baja dengan roda puli (traction sheave). Home lift (elevator rumah) di Indonesia banyak menggunakan sistem winding drum type walaupun untuk desain winding drum type harga pemasangan elevator 1.
(19) murah tetapi untuk biaya pemakaian listrik sangat mahal. Faktor yang mempengaruhi meningkatnya pemakaian listrik selain memakai sistem winding drum type adalah beratnya sangkar lift.. 1.2. Rumusan Masalah. Mendapatkan rancangan sistem penggerak home lift dengan menambahkan beban penyeimbang.. 1.3. Tujuan. Adapun tujuan dari Tugas Akhir ini adalah: 1. Melakukan rancang bangun sistem penggerak home lift dengan bantuan beban penyeimbang. 2. Mewujudkan rancang bangun dalam bentuk miniatur.. 1.4. Batasan Masalah Beberapa pembatasan masalah yang dilakukan agar ruang lingkup. pembahasan permasalahan menjadi terfokus dan tidak menyimpang dari penelitian antara lain adalah sebagai berikut: 1. Menggunakan sistem winding drum type yang sudah diteruskan ke beban penyeimbang.. 2.
(20) 2. Menggunakan sistem roping tali baja (sling) sesuai dengan yang biasa digunakan. 3. Menggunakan car lift yang lebih ringan, kokoh, dan aman. 4. Rancang bangun sistem penggerak home lift ini digunakan pada bangunan 3 lantai (home lift). 5. Kapasitas angkut sangkar elevator yang telah diperingan adalah 4 - 5 orang. 6. Pada perencanaan tidak membahas sistem kontrol pada home lift.. 1.5. Manfaat Perancangan. Mendapatkan rancang bangun sistem penggerak home lift yang diteruskan ke beban penyeimbang untuk mengurangi kerja motor dan mengurangi biaya pemakaian listrik.. 1.6. Sistematika Penulisan Untuk mempermudah pembahasan, maka dalam penulisan tugas akhir ini. dibagi menjadi lima bab sebagai berikut: 1. BAB 1 PENDAHULUAN Pada bab ini dijelaskan mengenai latar belakang pemilihan topik, rumusan dan batasan masalah yang akan dibahas, tujuan dalam penulisan tugas akhir ini, serta sistematika penulisan yang digunakan.. 3.
(21) 2. BAB 2 TINJAUAN PUSTAKA Pada bab ini berisi teori pendukung yang menjadi dasar penulisan tugas akhir ini, antara lain mengenai perhitungan terjadinya slip dalam lifti, perhitungan daya motor, perhitungan biaya listrik, perhitungan tegangan tali, perhitungan diameter puli, perhitungan banyaknya ulir, perhitungan diameter poros, dan analisis gaya pada poros.. 3. BAB 3 PERANCANGAN SISTEM Pada bab ini berisi tentang tahapan dalam perancangan yang terdiri dari: Metode perancangan yang digunakan, perancangan struktur, varian dan pemilihan varian yang digunakan. 4. BAB 4 PERHITUNGAN Pada bab ini akan dihitung dan dirancang hasil dari sistem pengangkat yang sudah dimodifikasi, seperti panjang total puli, banyaknya ulir, diameter puli, diameter poros, total berat beban penyeimbang, dan terakhir biaya konsumsi listrik.. 5. BAB 5 KESIMPULAN DAN SARAN Pada bab ini disampaikan simpulan dari seluruh penelitian yang dilakukan dan saran-saran yang kiranya dapat menjadi bahan pertimbangan untuk tugas akhir yang berhubungan.. 4.
(22) BAB 2 TINJAUAN PUSTAKA. 2.1. Pesawat Lift Rekayasa pesawat lift telah banyak mengalami perbaikan sejak ditemukannya. pesawat pengaman oleh Eisha Graves Otis pada tahun 1852. Bertahun-tahun manusia senantiasa berusaha mencari cara memindahkan barang ke atas dengan mudah dan aman. Banyak yang gagal oleh sebab tidak dilengkapi alat pengaman bentuk apapun. Pesawat pengaman ciptaan Otis sangat sederhana dibanding yang didapati sekarang. Pada waktu itu kereta lift langsung ditarik dengan tali serat melalui roda dan ujung tali digulung pada tabung silinder (sistem tarikan langsung). Tenaga penggerak untuk memutar tabung pada waktu itu ialah mesin uap. Peralatan paling utama pada instalasi pesawat lift ialah menyangkut keselamatan pengguna yaitu rel pemandu, pesawat pengaman (safety device), speed governor, saklar batas lintas (final limit switches) dan penyangga (peredam) atau buffer untuk kereta dan bobot imbang. Sedangkan pintu, penggerak pintu, instalasi jaringan kawat listrik dann kendali (controller) adalah komponen yang penting juga. Pesawat lift yang umum digunakann pada masa sekarang adalah sistem tarikan tidak langsung, jika tidak direkayasa dan direncanakan dengan betul, yaitu gaya traksi puli, bahan dan struktur tali baja, keseimbangan berat kereta dan berat bobot penyeimbang.. 5.
(23) Pesawat lift jenis “tarikan gesek (tidak langsung)” yang digerakkan oleh motor listrik (electric traction elevator) atau disingkat saja lift traksi. Hal ini untuk membedakan lift dengan transmisi hidrolis dan tarikan langsung (drum drive lift). 1. Komponen pesawat lift sebagai elemen penggerak yang terpenting ialah: a) Roda tarik (traction sheave) atau sering disebut roda puli atau teromol. Teromol berarti kepingan benda bulat bentuk cakram, biasanya untuk roda katrol atau rem. Sedangkan puli berasal dari kata pulley yaitu roda penarik untuk mengangkat barang dengan bantuan tali. Roda puli diputar oleh sumbu (as) yang berhubungan langsung dengan as motor sebagai sumber tenaga; atau tidak langsung, melainkan melalui transmisi roda gigi reduksi. b) Roda gigi reduksi dipakai jika kecepatan lift lebih rendah dari 180 m/min. Oleh karena putaran motor listrik terlalu besar, maka dibuthkan gigi reduksi untuk menyesuaikan antara kebutuhan putaran as, dan putaran roda tarik c) Motor listrik penggerak sebagai sumber tenaga lift yaitu motor-motor AC induksi (induction AC motor) dimana besaran putarannya dikontrol oleh frekuensi dan jumlah pole (pasangan kutub-kutub) d) Tali baja tarik (steel hoist rope) sebagai transmisi atau penyalur tenaga, menggerakkan kereta naik-turun sepanjang lintas dalam ruang luncur. 2. Komponen pesawat lift sebagai pelengkap pengangkat terdiri dari:. 6.
(24) a) Kereta yang diimbangi dengan bandul atau bobot imbang. Kedua komponen tersebut diikat oleh beberapa lembar tali baja tarik pada kedua sisi ujung tali tersebut, dan tali meingkar atau memeluk sebagian permukaan roda puli. Masing-masing tali duduk pada alurnya dalam keadaan tegang. Bentuk alur direncana khusus untuk puli tertentu sesuai dengan perencanaan sistem tarikan. Jika roda tarik berputar, maka atas gaya gesek yang terjadi anatar roda dengan talitali, akan menarik dan mengangkat kereta serta bersamaan menurunkan bandul pada ujung tali yang lain, atau sebaliknya jika arah putaran roda terbalik.. 2.2. Tali Baja Tali baja digunakan secara luas pada mesin-mesin pengangkut sebagai. perabot pengangkat. Dibandingkan dengan tali, tali baja mempunyai keunggulan sebagai berikut: 1. Lebih ringan. 2. Lebih tahan terhadap sentakan. 3. Operasi yang tenang walaupun pada kecepatan operasi tinggi. 4. Keandalan operasi yang lebih tinggi. Tali baja terbuat dari kawat baja dengan kekuatan σb = 130 sampai 200 kg/mm2. Didalam proses pembuatannya kawat baja diberi perlakuan panas tertentu dan. 7.
(25) digabung dengan penarikan dingin, sehingga menghasilkan sifat mekanis kawat baja yang tinggi. Tali baja dibuat dengan mesin khusus; pertama-tama kawat dililitkan menjadi untaian dan kemudian dianyam lagi menjadi tali bulat. Kedua proses berlangsung secara bersamaan untaian dililitkan pada inti yang terbuat dari rami, asbes, atau kawat baja yang lunak. Inti asbes dan kawat baja digunakan untuk tali yang beroperasi pada suhu yang tinggi. Akan tetapi, inti kawat akan mengurangi kefleksibelan tali dan biasanya hanya digunakan untuk tali yang mengalami gaya tekan yang tinggi, misalnya digulung beberapa lapis pada drum. Tali baja tarik khusus untuk elevator harus dibuat dari kawat baja yang cukup kuat, tetapi cukup lemas tahan tekukan, dimana tali tersebut bergerak bolak-balik melalui roda. Batas patah kawat baja ialah kira-kira 19.000 kgf/cm2 atau 190 kgf/mm2. Konstruksi tali terdiri dari 8 pintalan yang dililitkan dengan inti di tengah dari serat manila henep, yang mengandung miyak lumas. Tiap-tiap pintalan terdiri dari 19 kawat yaitu 9.9.1, artinya 9 kawat diluar, 1 dipusat dan 9 lagi diantaranya. Biasanya 9 kawat yang diluar dibuat dari baja “lunak” (130 kgf/mm2) agar menyesuaikan gesekan dengan roda besi tuang, tanpa menghasilkan keausan berlebihan. Konstruksi tali sering disebut atau ditulis 8 x 19 atau 8 x 9.9.1.. 8.
(26) Gambar 2.1 Wire Rope Components [2]. Gambar 2.2 Tali baja 8 x 19 [2]. 9.
(27) Keselamatan penumpang elevator sangat bergantung dari tali baja tarik. Oleh karena itu faktor keamanan cukup besar, yaitu untuk 12 untuk lift berkecepatan 420 m/m, dan menurun sampai 8 untuk elevator berkecepatan 45 m/m. Tabel 2.1 Batas Patah Tali Baja Tarik 8 x 19 [2]. Diameter Nominal. Perkiraan Berat. Batas Patah Maximal. (mm). (kg/m). (Kawat 130/160 kgf/mm2). 6.30. 0.13. 1.650. 8.00. 0.21. 2.500. 9.50. 0.30. 3.690. 11.00. 0.42. 5.000. 12.70. 0.54. 6.500. 14.30. 0.68. 8.100. 15.90. 0.83. 10.050. 19.00. 1.65. 14.400. Dilihat dari segi arah pilinan, tali dibedakan atas 2 jenis yaitu : 1. Regular lay, jika arah pilinan kawat berlawanan dengan arah lilitan dan strand 2. Lang lay, jika arah pilinan kawat sama searah dengan lilitan dan stand. 10.
(28) Keuntungan dari lang lay ialah kemuluran tali lebih kecil yaitu 0.1 % hanya dibanding dengan regular lay 0.5%. Tekanan pada alur puli lebih kecil sehingga lebih awet dan lebih luwes, tidak mempunyai sifat kaku (menendang) saat mau dipasang. Lang lay dipakai untuk instalasi elevator berkecepatan tinggi diatas 300 m/menit, dan jarak lintas diatas 200 m. Lang lay juga lebih tahan terhadap fatigue, tetapi batas patah lebih kecil kirakira 10% dibanding dengan regular lay. Umpama pada tali berdiameter 13 mm, untuk regular lay batas patah 6500 kgf, sedangkan pada lang lay sebesar kira-kira 5800 kgf.. Gambar 2.3 Types of lay [4] Kabel baja yang merupakan sarana untuk pengangkatan mempunyai sifatsifat yang berbeda dengan rantai, yaitu :. 11.
(29) Kelebihan : a) Tahan terhadap beban kejut. b) Bila akan putus memperlihatkan tanda-tanda. c) Elastis. d) Tidak berisik bila digunakan. e) Dapat digunakan untuk kecepatan angkat yang tinggi.. Kekurangan : a) Tidak tahan terhadap korosi. b) Sukar untuk ditekuk-tekuk, sehingga memerlukan drum atau teromol penggulung yang besar. c) Dapat mulur atau memanjang. d) Cenderung untuk berputar.. Tali baja mempunyai umur. Panjang umur tergantung hal-hal berikut ini: a) Cara pentalian (roping) atau jumlah tekukan selama dioperasikan. Roping 1 : 1 lebih awet dibanding roping 2 : 1 b) Tekanan/tegangan (dalam kgf) dan hubungannya dengan kecepatan c) Diameter roda tarik (traction sheave) dan diameter roda lain yang dilalui tali d) Keseragaman tegangan dari tiap-tiap tali e) Jenis konstruksi tali dianjurkan jumlah minimal lilitan (strands) adalah 8 agar lemas (flexible) 12.
(30) f) Jumlah Start stop Per Hour (SPH) g) Besaran hubungan traksi (traction relation) terhadap bata slip h) Lingkungan (corrosive environtment) i) Cara penanganan (handling) dan cara penyimpanan. Dalam perencanaan, maka tali harus berumur minimal 5 tahun, sedangkan roda tarik dapat berumur 10 s/d 15 tahun. Dalam kenyataannya banyak roda tarik berumur sampai 20 tahun, dan banyak tali baja berumur dibawah 5 tahun. Berikut beberapa contoh konstruksi (bentuk) tali baja.. Gambar 2.4 Konstruksi Tali Baja [4] Fenomena yang sangat rumit terjadi dalam pengoperasian tali, banyak parameter yang tidak dapat ditentukan dengan tepat. Setiap kawat didalam tali yang ditekuk mengalami tegangan yang rumit, yang merupakan gabungan tegangan tarik,. 13.
(31) lentur dan puntir, serta ditambah dengan saling menekan dan bergesekan diantara kawat dan untaian. Akibatnya, tegangan total yang terjadi dapat ditentukan secara analisis hanya pada pendekatan tingkatan tertentu. Lagipula bila tali melewati puli dan drum, kawat pada bagian terluar akan mengalami kikisan yang akan mengurangi kekuatan tali tersebut. Percobaan - percobaan menunjukkan bahwa umur tali sangat dipengaruhi oleh kelelahan. Diketahui juga bahwa setiap tali hanya dapat mengalami lengkungan tertentu yang telah melewati batas ini akan rusak dengan cepat. Tergantung pada jumlah lengkungan, umur tali dapat ditentukan dengan memakai perbandingan. ialah diameter tali) dan. (Dmin adalah diameter minimum puli atau drum dan d. (δ. – diameter kawat pada tali). Penyelidikan. menunjukkan bahwa dengan perbandingan. yang sama, umur tali kira-kira. berbanding terbalik dengan jumlah lengkungan. Satu lengkungan diasumsikan sebagai perubahan tali dari kedudukan lurus menjadi kedudukan melengkung atau dari kedudukan melengkung menjadi kedudukan lurus. Lengkungan berbalik yakni menuju arah berlawanan dengan lengkungan sebelumnya mengurangi umur tali sebanyak setengahnya, atau kira-kira sebanding dengan dua buah lengkungan ke arah yang sama. Jumlah lengkungan yang ditentukan oleh jumlah titik (puli,drum) tepat tali lewat, lengkungan dalam satu arah pada titik tersebut setara dengan lengkungan variabel setara dengan lengkungan ganda.. 14.
(32) Untuk mendapatkan umur tali yang seragam, pengaruh jumlah lengkungan harus dikompesasikan dengan suatu perubahan pada perbandingan. .. Tabel 2.2 Jumlah Lengkungan [4] Jumlah. Jumlah. Jumlah. Lengkungan. Lengkungan. Lengkungan. 1. 16. 7. 30. 13. 36. 2. 20. 8. 31. 14. 37. 3. 23. 9. 32. 15. 37,5. 4. 25. 10. 33. 16. 38. 5. 26,5. 11. 34. 6. 28. 12. 35. Pemeriksaan umur tali dilakukan sebagai berikut. Berdasarkan metode penggantungan muatan menggunakan tabel 2 untuk mencari menyatakan diameter tali dengan rumus:. . Dengan. , maka diperoleh. (1). Keterangan: δ = Diameter satu kawat i = Jumlah kawat dalam tali 15.
(33) Setiap wayar dalam lengkungan tali yang dibebani suatu tekanan yang komplit yaitu tension, bending stress, dan twisting stress dikombinasikan dengan tekanan dan gosokan (rubbing) timbal balik dari wayar dan strand. Pengalaman menunjukkan bahwa umur tali baja sangat tergantung pada fatigue (kelelahan). Jadi umur tali akan sangat tergantung pada frekuensi pembengkokan dari tali tersebut, jadi dari jumlah pembengkokan /nomor bengkokan (Number of Bent, NB) didefinisikan sebagai jumlah titik-titik pada puli atau drum sebagai titik tolak datang atau pergi dari tali. Untuk mengetahui besarnya tegangan pada tali dalam keadaan terbeban dapat digunakan :. (2). Keterangan: = Ultimate breaking strength dari wayar. (kg/cm2). K = Faktor keamanan dari tali S = Tegangan tali. (Kg). A = Luas penampang. (m2). E = Modulus elastis tali = 2.100.000 kg/cm2 E’ = 3/8 E (Modulus elastis tali yang telah dikoreksi) E’ = 800.000 kg/cm2. 16.
(34) Dari rumus (2) diatas, dapat diperoleh rumusan sebagai berikut:. (3). Keterangan: S = Ditentukan berdasarkan spesifikasi pesawat angkat (mekanisme sistem puli) (Kg). σb = Ditetapkan berdasarkan material wayar. (Kg/cm2). K = Ditentukan berdasarkan jumlah wayar yang patah tiap jarak antara (t) d/Dmin = Ditentukan berdsarkan NB dari sistem puli E’ = Ditentukan berdasarkan material wayar. (Kg/cm2). i = Ditentukan berdasarkan konstruksi dari tali Tali hanya boleh diperiksa satu kali terhadap pengecekan tegangan tarik sesuai dengan rumus:. (4). Keterangan: S = Tarikan maksimum yang diinginkan pada tali. (Kg). P = Kekuatan putus tali sebenarnya,,. (Kg) 17.
(35) K = Faktor keamanan tali Tarikan kerja maksimum pada bagian tali dari sistem puli beban S w dihitung dengan rumus:. (5). Keterangan: Q = Berat muatan yang diangkat. (Kg). n = Jumlah muatan tali yang menyangga muatan = Efisiensi puli. 1. = Efisiensi yang disebabkan kerugian tali akibat kekakuannya ketika menggulung pada drum yang diasumsikan sebesar 0,98.. 2.2.1 Perhitungan Daya (Kekuatan Batas Kelelahan) Tali Kawat Baja dengan Metode Profesor Zhitkov Bermula dri kenyataan bahwa kerusakan tali diakibatkan oleh kelelahan bahan dan setiap tali hanya dapat mengalami lengkungan dalam jumlah tertentu, para peneliti telah melakukan percobaan untuk mencari hubungan antara umur tali dengan berbagai faktor yang menyebabkan keausan dan menentukan jumlah lengkungan yang telah melampaui batas yang akan terjadi kerusakan tali pada tali kasus.. 18.
(36) Metode perhitungan daya tahan tali kawat harus dilakukan secara ilmiah dan berguna dalam prakteknya. Dalam mendesain peralatan pengangkat, pendesain peralatan pengangkat, pendesain harus selalu memperhatikan ketergantungan umur pakai tali pada ukuran puli dan drum, beban, konstruksi tali dan faktor lainnya. Metode perhitungan daya tahan tali kawat yang dijelaskan berikut dihasilkan oleh penelitian bertahun-tahun yang dilakukan di Hammer dan Sikcle Works. Berbagai konstruksi tali yang berdiameter dari 3 mm sampai 28 mm diuji dengan tiga buah mesin khusus untuk menentukan metalurgi, produksi, desain, dan operasi yang menentukan kekuatan tali. Pada tahap pertama, karakteristik umur tali dikumpulkan dari semua pengujian dalam bentuk grafik yang menghasilkan hubungan: z = f1 (σ) dan z = f2. data ini kemudian dipakai untuk menggambarkan suatu diagram akan menunjukkan hubungan. dengan. berbagai. jumlah. lengkungan. tali. dan. untuk. mendapatkan secara matematis rumus desain:. (6). Keterangan:. = Perbandingan diameter drum dan puli dengan diameter tali. 19.
(37) m = Faktor tergantung pada jumlah lengkungan berulang tali z selama periode keausannya sampai tali tersebut rusak = Tegangan tarik sebenarnya pada tali. (Kg/mm2). C = Faktor yang memberi karakteristik konstruksi tali dan kekakuan tali dan kekuatan tarik maksimum bahan kawat C1 = Faktor yang tergantung pada tali C2 = Faktor ini menentukan faktor produksi dan operasi tambahan, yang tidak diperhitungkan oleh faktor C dan C1.. 2.3 2.3.1. Puli dan Drum Puli Puli dibuat dengan desain tetap dan bebas. Puli dengan as yang tetap disebut. juga dengan puli penuntun karena berfungsi untuk mengubah arah peralatan pengangkat. Suatu sistem puli adalah gabungan beberapa puli bebas dan puli tetap atau puli-rantai. Ada sistem puli untuk bati gaya dan untuk bati kecepatan alat pengangkat ini kelebihan kecepatan. Alat pengangkat yang menggunakan puli untuk bati kecepatan, misalnya pada lift hidrolik dan pneumatik. Sistem puli yang berfungsi sebagai perabot pengangkat bebas tidak begitu penting; penggunaan sistem puli yang terutama untuk mentransmisikan daya terdapat pada derek dan crane. Roda puli tali terdapat berupa desain tetap, bergerak dan kompensasi. Biasanya roda puli ini terbuat dari coran (besi kelabu atau baja) atau lasan. Efisiensi 20.
(38) η ≈ 0,96 -0,97 dengan memperhitungkan gesekan pada bantalan. Diameter roda puli untuk tali rami tidak boleh kurang dari 10 d , dengan d = diameter tali. Untuk tali kawat diameter minimum roda pulinnya ditentukan dari rumus D ≥ ℮1 ℮2 d. Keliling pelek roda puli dibuat sedemikian rupa sehingga tali tidak akan macet pada alurnya dan dapat bergerak cukup bebas terhadap bidang pusat roda puli tersebut. Untuk mencegah agar tali yang keluar menyimpang dari alur sisi dalam roda puli tanpa terjadi perlengkungan yang tajam (sudut simpang a), titik pusat e dari penampang tali harus berada di dalam alur.. 2.3.2. Drum Biasanya drum untuk tali rami termasuk jenis polos dengan flens yang tinggi. yang memungkinkan tali tergulung atas beberapa lapis. Hal ini memungkinkan panjang drum dapat diperpendek. Diameter drum dipilih dengan perbandingan yang sama dengan rda puli: D ≥ 10 d. Drum untuk tali kawat baja terbuat dari besi cor, kadang dari besi tuang atau konstruksi lasan. Dengan memperhitungkan gesekan pada bantalan efisiensi η ≈ 0,95. Diameter drum tergantung pada diameter tali. Untuk drum penggerak daya, drum harus selalu dilengkapi dengan alur heliks sehingga tali akan tergulung secara beragam dan keausannya akan berkurang. Jari-jari alur heliks harus dipilih tidak menyebabkan kemacetan tali.. 21.
(39) Gambar 2.5 Dimensi Alur Drum [4]. Tabel 2.3 Dimensi Alur Drum [4] Diameter. r1. Standar. Dalam. Tali S1. C1. S2. C2. R2. d 4,8. 3,5. 7. 2. 9. 4,5. 1,0. 6,2. 4,0. 8. 2. 11. 5,5. 1,5. 8,7. 5,0. 11. 3. 13. 6,5. 1,5. 11,0. 7,0. 13. 3. 17. 8,5. 1,5. 13,0. 8,0. 15. 4. 19. 9,5. 1,5. 15,0. 9,0. 17. 5. 22. 11. 2,0. 19,5. 11,5. 22. 5. 13,5. 13,5. 2,0. 24,0. 13,5. 27. 6. 16,0. 16,0. 2,5. 28,0. 15,5. 31. 8. 18,0. 18,0. 2,5. 34,5. 19,0. 38. 10. 22,0. 22,0. 3,0. 22.
(40) 39. 21,0. 42. 12. 24,5. 24,5. 3,5. Drum dengan satu tali tergulung hanya mempunyai satu arah heliks ke kanan; drum yang didesain untuk dua tali diberi dua arah heliks ke kanan dan ke kiri. Jumlah lilitan pada drum untuk satu tali adalah. (7). Keterangan: i = Perbandingan sistem tali H = Tinggi angkat. (mm). D = Diameter drum. (mm). Angka 2 ditambahkan untuk lilitan yang menahan muatan. Standar ini diterapkan pada drum untuk crane yang dicor. Dengan menyisakan panjang sebesar 5s untuk menahan tali dan untuk kedua sisi flens didapat keseluruhan panjang drum. .... (8) Bila dua tali digulung pada satu drum (sistem puli majemuk) panjang toal drum akan menjadi. + I1. ... (9) 23.
(41) Dengan lame ialah jarak pada bagian tengah drum, antar heliks ke kanan dan ke kiri yang sesuai dengan desainnya. Karena jarak dua lilitan penahan harus disediakan pada setiap sisinya, dan mengambil 4s untuk tali yang diikat pada tiap setiap sisi dan flens sisinya. Nilai ini telah diperhitungakan dengan rumus diatas. Tebal dinding drum dari besi cor dapat ditentukan dari rumus empiris berikut: ω = 0,02 D + (06 sampai dengan 1,0) cm. (10). keterangan: D = diameter drum Selama beroperasi drum mengalami gabungan pembebanan torsi, lentur dan tekan. Kedua regangan pertama akan menyebabkan tegangan yang cukup berpengaruh pada drum yang sangat panjang. Karena pembebanan tekan lebih berpengaruh maka harus diperkirakan terlebih dahulu. Anggaplah memisahkan dari badan drum satu cincin setengah lingkaran dengan tebal ω, dengan lebar kisar tali s: pengaruh setengah cincin yang terpisah ini digantikan dengan gaya tarik 2s. Gaya yang terjadi pada elemen luas dF = Rdφs akan berjumlah: ds = Rdφsp, dengan p adalah tekanan normal pada satuan permukaan drum. Jumlah proyeksi semua gaya elementer pada bidang vertikal akan menjadi:. 2S = 2. cos φ = 2 Rsp. cosφ dφ = 2 Rsp. Sehingga. 24.
(42) P=. Karena permukaan drum dikenai gaya yang didistribusikan secara merata dengan intensitas sebesar p, maka drum dapat dianggap sebagai silinder dengan tekanan luar, yang tegangan pada dindingnya ditentukan dengan rumus Lame yang terkenal itu. Tegangan pada permukaann dalam silinder menurut rumus Lame adalah:. Dan pada permukaan luarnya. Bila Pmasuk = 0, Pkeluar = p dan d = D - 2ω, maka akan didapatkan setelah transformasi sebenarnya, tegangan tekan maksimal pada permukaan dalam drum.. Dengan mengangap pecahan. ≈ 1 didapatkan rumus pada umumnya untuk. perhitungan. (11). 25.
(43) yang diijinkan untuk kelas (C4) 15-32 (besi-cor) = 1000 kg/cm2, untuk. Nilai. nilai baja cor sampai dengan 1600 Kg/cm2 dan untuk lasan sampai 1800 kg/cm2. Ketika menghitung pengaruh tegangan kompleks pada drum akibat beban lentur dan torsi yang terjadi bersamaan, tegangan yang diijinkan. dapat untuk. besi cor kelabu sampai 230 Kg/cm2. Untuk baja cor sampai 1200 Kg/cm2 dan untuk drum lasan sampai 1400 Kg/cm2.. 2.4. Keseimbangan. 2.4.1. Pengertian Pengertian keseimbangan ada 2 macam yaitu: static balance dan dynamic. balance a. Static balance ialah keseimbangan badan kereta duduk pada rangka dan landas, yang ditumpu oleh karet isolasi peredam getaran. Bagian ujung atas badan kereta ditumpu dengan rol-rol karet pada sisi kiri-kanan dan “bersandar” pada rangka kereta (stiles). Jika kereta dalam keadaan seimbang betul, maka rol-rol tersesbut tidak atau hampir tidak menekan rangka, kecuali jika terjadi getaran. Begitu pula roda luncur pemandu (guide roller) tidak terlalu menekan pada permukaan rel, sehingga hambatan (friction) sangat minim. b. Dynamic balance ialah keseimbangan antara berat kereta kosong plus beban tertentu (overbalance) terhadap berat bobot imbang (counterweight). Faktor keseimbangan (overbalance atau OB) biasanya sebagai berikut: 26.
(44) 2.4.2. . Lift berkapasitas Q = 1200 kg keatas, OB = 0,42 sampai 0,40. . Lift berkapasitas Q = 600 kg s/d 1150 kg, OB = 0,45. . Lift berkapasitas Q = 300 kg s/d 580 kg, OB = 0,50 sampai 0,55. Manfaat Angka-angka keseimbangan tersebut diatas diperoleh dari rata-rata beban. didalam kereta yang diangkut naik maupun turun sepanjang hari, dengan demikian lift diharapkan lebih banyak (sering) bekerja dalam keadaan seimbang, dengan penghematan tenaga listrik yang terpakai. Pada saat lift bekerja naik maupun turun dalam keadaan sempurna seimbang, maka besaran arus (Ampere) umpan tenaga listrik yang terpakai paling rendah dan nilainya persis sama, saat naik dan turun. Tenaga listrik yang minimm tersebut hanya dipakai untuk mengatasi hambatan/gesekan (friction) yang mungkin timbul antara sepatu luncur dengan rel pemandu dan hambatan pada bantalan-bantalan roda puli, roda kereta, roda pemandu, juga akibat tekukan-tekukan tali dan heat loss dalam motor. Jika lift dalam keadaan penuh arah turun, maka sebenarnya motor diputar oleh gerakan kereta turun, dengan gaya sebesar (1 - 0,425) x kapasitas. Motor berubah menjadi generator, yang menghasilkan tenaga listrik untuk lift sebelahnya atau peralatan lain dalam bangunan (regenerating system dalam close loop circuit). Jika tinggi lintas lift melebihi 30 meter (kira-kira 8 lantai), maka berat tali baja tarik harus diimbangi dengan tali baja kompensasi. Tali kompensasi tersebut dipasang dibawah kereta ujung yang satu dan dibawah bobot imbang pengikatan 27.
(45) ujung yang lain. Ujung lengkungan tali ada di pit melalui roda penegang yang diikat ke dasar pit. Untuk lift kecepatan tinggi mulai 240 m/min pengikatan roda penegang dilengkapi dengan shock-breaker jenis minyak hidrolis. Dengan cara tersebut, maka berat tali baja tidak mempengaruhi keseimbangan sepanjang lintas.. 2.4.3. Pelaksanaan Lapangan Pada waktu pelaksanaan pekerjaan pemasangan bobot imbang sementara. dibuat seimbang sama berat dengan bobot kereta kosong yaitu tidak semua filler weight dipasang dalam rangka bobot imbang. Dengan demikian kereta dapat dipakai oleh teknisi pemasang untuk bekerja didalam ruang luncur naik maupun turun. Kemudian setelah testing awal selesai, maka filler weight sisanya dapat dimasukkan dalam rangka secukupnya.. 2.5. Tarikan dan Slip. 2.5.1. Gaya Gesek Kemampuan traksi (traction ability) dari mesin hanya mengandalkan gaya. gesek antara tali baja dengan roda puli (traction sheave) dari besi tuang. Besarnya gaya gesek ialah selisih antara tegangan pada tali tegang dikurangi oleh tegangan pada tali kendor atau G = T1 – T2 (statis). Faktor yang menentukan kekuatan gaya gesek ialah:. 28.
(46) a. Dua jenis bahan yang bergesek. Dalam hal ini antara baja dengan besi tuang. Koefisien gesek f = 0,11 jika kering, dan 0,9 jika berminyak. Tarikan akan lebih baik jika tali tidak diminyaki berlebihan. b. Sudut kontak (arc of contact) tali memeluk roda puli. Umpama, tarikan akan lebih baik jika sudut kontak 180o (3,14 radian) dibanding sudut kontak 165o (2,88 radian), yaitu jika mesin menggunakan roda penyimpang (deflektor sheave). c. Bentuk alur (groove) dudukan tali pada permukaan keliling roda puli, yaitu ada 3 macam:. 2.5.2. . Bentuk V atau disebut flat seating. . Bentuk U atau disebut round seating dan. . Bentuk U dengan undercut dibagian dasar alur.. Hubungan Traksi Rumus hubungan traksi (traction relation) batas mulai slip (creep) keadaan. statis ialah sebagai berikut:. (12). Dan rumus besaran gaya gesek adalah: ... (13) Dimana: 29.
(47) disebut hubungan traksi (traction relation) keadaan statis. adalah gaya pada tali tegang adalah gaya pada sisi tali kendor adalah angka dasar logaritm, yaitu 2,718 F adalah koefisien gesek bahan 0,10 – 0,12 adalah sudut kontak (arc of contact) dalam radian, yaitu 180o = 3.14 radian K adalah koefisien bentuk alur . 1,0 untuk round seating (U – groove). . 1,1 untuk bentuk alur U dengan undercut 30o. . 1,2 untuk bentuk alur U dengan undercut 45o. . 1,3 untuk bentuk alur U dengan undercut 90o dan. . 1,4 untuk bentuk alur U dengan undercut 105o. . 2,0 untuk bentuk alur V 60o atau flat seating. 30.
(48) To Car Hitch. To Cwt Hitch. T1. T2. Gambar 2.6 Posisi T1 dan T2 [2]. Agar tidak terjadi slip (keadaan statis), maka. 2.5.3. harus lebih kecil dari. Batas Slip Dinamis. a. Jika. lebih besar dari. , maka akan terjadi geser (slip) antara roda. tarik yang berputar dengan tali baja, berarti kereta penuh muatan tidak dapat diangkat atau bobot imbang mau turun walaupun roda puli tetap berputar. Usahakan. lebih kecil 20% dari batas slip. b. Dalam perencanaan. harus paling sedikit sama dengan o,8 kali. (atau 80%) karena adanya gaya dinamis saat perlambatan dan percepatan. 31.
(49) Dengan demikian saat terjadi percepatan (lift berangkat) danperlambatan (lift mau berhenti) tidak terjadi slip. Jika besaran percepatan/perlambatan a = 1,10 m/s2, maka besaran hubungan traksi (traction relation) TR berubah menjadi: (14) Atau TR = T1/T2 x Cd Keterangan: TR adalah traction relation dinamis atau TRD Cd adalah faktor dinamis (dynamic constant) a adalah percepatan g adalah percepatan gaya tarik bumi = 9,80 m/s2 sehingga a/g = 0,113, atau 1 + a/g = 1,113 dan 1- a/g = 0,887. Maka hubungan tarik: T1/T2 (1,113/0,887) = 1,255 T1/T2 Kesimpulan: 1,255 T1/T2 = T1/T2 = 0,80. (15). atau Batas slip dinamis adalah: ... (16). Agar tidak terjadi slip (atau geser) saat percepatan dan perlambatan, maka T1/T2 harus lebih kecil dari 0,80. 2.6. Efisiensi dan Daya. 2.6.1. Pengertian Efisiensi atau hasil guna adalah angka perbandingan antara kerja yang. dihasilkan dengan energi yang diumpankan. Selisih diantar keduanya adalah energi 32.
(50) yang hilang menjadi panas akibat gesekan (friction) dibantalan, sepatu atau roda luncur pada rel pemandu, tekukan tali, gesekan roda gigi dan heat loss motor listrik. Hasil kerja nyata (usaha mekanis) berupa energi potensial yaitu beban yang diangkat kali jarak kerja (lintas). Daya P (power) adalah kelanjutan energi berkaitan dengan waktu. Jika energi menigkat dengan waktu (lift naik beban penuh), maka daya adalah hasil pembagian energi per satuan waktu (HP) atau kilo Watt (kW).. 2.6.2. Efisiensi Efisiensi sangat bergantung dari sistem yang dipilih. Biasanya sistem yang. sangat efisien, menuntut harga lebih mahal pada awal investasi, tetapi setelah sekian tahun akan menjadi lebih hemat (ekonomis). Efisiensi sistem lift terdiri dari: . Efisiensi tarikan ƞ1 =. . Efisiensi mesin ƞ2 = Efisiensi tarikan. ƞ2. 0,90 0,95 mesin tanpa gigi reduksi (gearless machine). =. 0,55 s/d 0,80 mesin menggunakan transmisi gigi. reduksi (geared machine) . Efisiensi motor ƞ3 =. 0,97 (3% hilang sebagai heat loss). Efisiensi transmisi gigi reduksi (reduction gear) adalah kira-kira sebagai berikut: A. Roda gigi ulir/cacing (worm gear): efisiensi tergantung jumlah gigi ulir . Dengan satu gigi ulir ƞ2 =. 0,55 33.
(51) . Dengan dua gigi ulir ƞ2 =. 0,60. . Dengan tiga gigi ulir ƞ2 =. 0,75. B. Roda gigi helikal (helical gear) ƞ2 =. 2.6.3. 0,8. Daya atau Output. Dapat dirumuskan sebagai berikut:. Keterangan: Poutput dalam kilo Watt Q adalah kapasitas maksimal lift dalam kg V adalah kecepatan nominal lift dalam m/min OB adalah Faktor Keseimbangan. ηT adalah Efisiensi total sistem = η1 x η2 x η3 6120 adalah angka konversi kgm/m ke kW. 34.
(52) BAB 3 PERANCANGAN SISTEM. 3.1. Pokok Bahasan Sistem Pengangkat home lift pada umumnya menggunakan winding drum,. yaitu menggunakan puli berulir yang berfungsi untuk mengangkat dan menurunkan kabin yang terletak pada bagian bawah lift. Untuk sistem ini dibutuhkan motor dengan daya yang lebih besar dibandingkan dengan menambahkan beban penyeimbang seperti yang sering dipergunakan pada lift gedung bertingkat tinggi. Sehingga daya keluaran mesin bisa diperkecil.. 3.2. Penjabaran Tugas. Syarat-syarat yang harus dipenuhi dalam proses perancangan ini adalah: 1. Perancangan mengikuti standar SNI untuk bidang home lift, meliputi unsur keselamatam, dimensi dan mekanisme. 2. Dimensi dalam perancangan sistem gerak home lift didesain untuk rumah 3 lantai. Daftar spesifikasi atau daftar syarat-syarat dalam perancangan dapat dilihat dari apa yang harus dipenuhi (demand) dan hal yang tidak harus ada (wishes) dalam perancangan agar didapatkan sistem angkat home lift yang mampu bergerak.. 35.
(53) Tabel 3.1 Spesifikasi Rancangan DAFTAR SPESIFIKASI PERANCANGAN HOME LIFT Demand or. Persyaratan. Wishes Gaya D. . Mampu menggerakkan traction sheave sehingga kabin lift dapat naik-turun. Sistem D. . Dalam perancangan, traction sheave mampu menggerakkan kabin lift dan beban penyeimbang tanpa adanya slip. Material D. . Sesuai dengan standar yang biasa dipergunakan. Fungsi D. . Meningkatkan efisiensi motor. Biaya W. . Biaya produksi dan operasional se-ekonomis mungkin. 36.
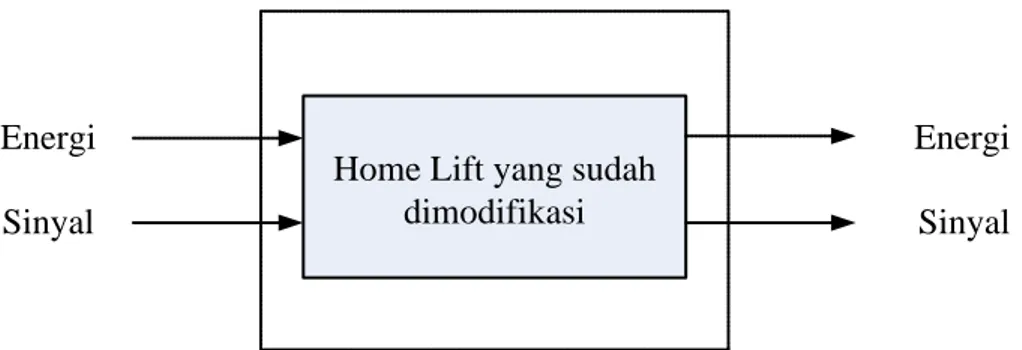
(54) 3.3. Struktur Fungsi. 3.3.1. Struktur Fungsi Keseluruhan Fungsi ini digambarkan dengan diagram blok yang menunjukkan hubungan. antara masukan dan keluaran, dimana masukan dan keluaran tersebut berupa aliran sinyal, material dan energi. Struktur fungsi keseluruhan dari sistem penggerak home lift dapat dilihat pada gambar diagram blok ini ditunjukkan hubungan antara masukan dan keluaran.. Energi Sinyal. Home Lift yang sudah dimodifikasi. Energi Sinyal. Gambar 3.1 Struktur Fungsi Keseluruhan. 3.3.2. Sub Struktur Fungsi Dari hasil analisis di atas, dapat ditentukan fungsi-fungsi yang mempengaruhi. sistem gerak home lift. Susunan dari beberapa fungsi ini membentuk suatu struktur fungsi. Pada gambar dibawah ini memperlihatkan struktur sub fungsi.. 37.
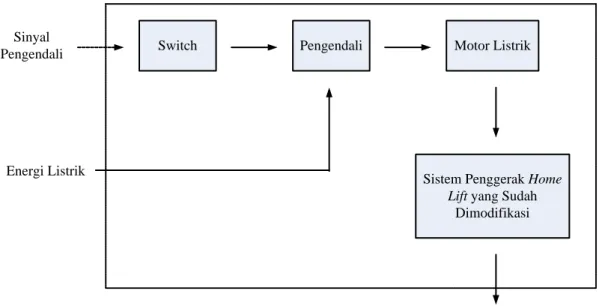
(55) Sinyal Pengendali. Switch. Pengendali. Energi Listrik. Motor Listrik. Sistem Penggerak Home Lift yang Sudah Dimodifikasi. Kabin Lift Naik/Turun. Gambar 3.2 Struktur Sub Fungsi. 3.4. Prinsip Solusi Untuk Sub Fungsi Dalam pencarian soludi dari masing-masing sub fungsi ditekankan bahwa. pemecahan masalah yang diperoleh, bertujuan untuk mendapatkan sebanyak mungkin variasi solusi. Setelah prinsip solusi sub fungsi telah dibuat, maka perlu dilakukan kombinasi, sehingga terbentuk suatu sistem yang paling menunjang.. 38.
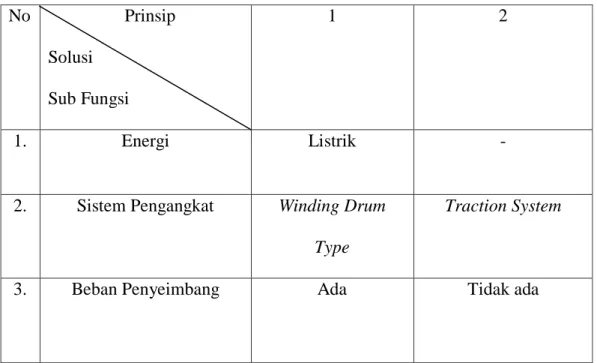
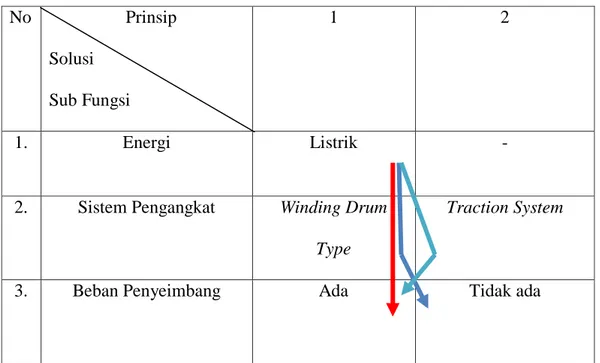
(56) Tabel 3.2 Prinsip Solusi Sub Fungsi No. Prinsip. 1. 2. Solusi Sub Fungsi 1.. Energi. Listrik. -. 2.. Sistem Pengangkat. Winding Drum. Traction System. Type 3.. 3.4.1. Beban Penyeimbang. Ada. Tidak ada. Kombinasi Prinsip Solusi Setelah prinsip solusi sub fungsi telah dibuat, maka perlu dilakukan. kombinasi, sehingga terbentuk sistem yang paling menunjang. Kombinasi yang ada ini dibagi-bagi lagi dalam beberapa varian.. Tabel 3.3 Kombinasi Prinsip Solusi Sub Fungsi Varian 1. 39.
(57) No. Prinsip. 1. 2. Solusi Sub Fungsi 1.. Energi. Listrik. -. 2.. Sistem Pengangkat. Winding Drum. Traction System. Type 3.. Beban Penyeimbang. Ada. Tidak ada. Layout varian 1: . Energi yang digunakan adalah listrik. . Sistem pengangkat yang digunakan adalah winding drum type. . Tidak menggunakan beban penyeimbang. Keuntungan dari Varian 1 ini adalah tidak membutuhkan ruang yang besar dalam proses pemasangan karena pada sistem ini tidak menggunakan beban penyeimbang dan posisi mesin terletak dibawah ruang luncur. Kerugian dari Varian 1 ini adalah daya keluaran motor besar dikarenakan pada sistem ini tidak dilengkapi dengan beban penyeimbang dan juga membuat biaya listrik besar. Dengan posisi motor yang terletak dibawah ruang luncur dapat merusak motor pada saat banjir.. 40.
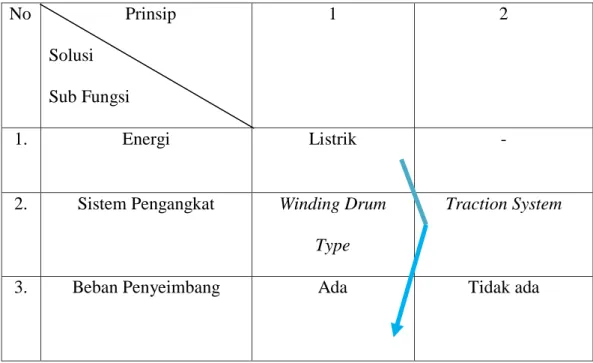
(58) Tabel 3.4 Kombinasi Prinsip Solusi Sub Fungsi Varian 2 No. Prinsip. 1. 2. Solusi Sub Fungsi 1.. Energi. Listrik. -. 2.. Sistem Pengangkat. Winding Drum. Traction System. Type 3.. Beban Penyeimbang. Ada. Tidak ada. Layout varian 2: . Energi yang digunakan adalah listrik. . Sistem pengangkat yang digunakan adalah winding drum type. . Menggunakan beban penyeimbang. Keuntungan dari Varian 2 ini adalah dengan menambahkan beban penyeimbang pada sistem ini maka dapat mengurangi daya keluaran motor, dapat mengurangi biaya listrik dan tidak dapat merusak motor pada saat banjir karena letak motor yang berada di atas ruang luncur. Kerugian dari Varian 2 ini adalah membutuhkan ruang yang besar dalam proses pemasangan dan juga untuk meletakkan posisi beban penyeimbang. Dengan. 41.
(59) menambahkan beban penyeimbang pada sistem ini maka dibutuhkan desain traction sheave yang baru. Tabel 3.5 Kombinasi Prinsip Solusi Sub Fungsi Varian 3 No. Prinsip. 1. 2. Solusi Sub Fungsi 1.. Energi. Listrik. -. 2.. Sistem Pengangkat. Winding Drum. Traction System. Type 3.. Beban Penyeimbang. Ada. Tidak ada. Layout varian 3: . Energi yang digunakan adalah listrik. . Sistem pengangkat yang digunakan adalah Traction system. . Menggunakan beban penyeimbang. Keuntungan dari Varian 3 ini adalah dengan memakai beban penyeimbang pada sistem ini maka dapat mengurangi daya keluaran motor dan dapat mengurangi biaya listrik. Untuk sistem ini peletakkan motor berada di atas ruang luncur, sehingga tidak dapat merusak motor pada saat kondisi banjir.. 42.
(60) Kerugian dari Varian 3 ini adalah membutuhkan ruang yang besar untuk proses pemasangan. Kekurangan sistem ini juga terdapat dalam proses naik/turun kabin lift, karena dengan kabin lift yang berkurang beratnya akan terjadi slip. Tabel 3.6 Matriks Solusi Sub Fungsi No. Prinsip. 1. 2. Solusi Sub Fungsi 1.. Energi. Listrik. -. 2.. Sistem Pengangkat. Winding Drum. Traction System. Type 3.. Beban Penyeimbang. Ada. Tidak ada. Dari tabel 3.5 dihasilkan varian-varian sebagai berikut yang berdasarkan kombinasi prinsip solusi: . Varian 1 (V1): 1.1 – 2.1 – 3.2. . Varian 2 (V2): 1.1 – 2.1 – 3.1. . Varian 3 (V3): 1.1 – 2.2 – 3.1. 43.
(61) 3.4.2. Pemilihan Varian Terbaik Dari kedua jenis varian yang didapatkan, akan dipilih satu varian yang. dianggap paling baik dan memenuhi beberapa aspek yang diinginkan oleh perancang. 1. Varian 1 terdapat kekurangan berupa daya keluaran motor yang besar maka biaya listrik relatif besar dan dengan posisi motor yang di bawah sangat berbahaya jika dalam keadaan banjir. 2. Varian 2 dianggap yang paling baik. Varian ini membutuhkan ruang yang besar untuk proses pemasangan dan juga adanya beban penyeimbang pada sistem. Namun, kelebihan sistem ini dapat mengurangi daya keluaran motor dan dapat mengurangi biaya listrik. Untuk sistem ini posisi motor terletak diatas sehingga tidak berbahaya dalam keadaan banjir. 3. Varian 3 memang memiliki beban penyeimbang sehingga dapat mengurangi daya keluaran motor, mengurangi biaya listrik, dan juga posisi motor yang di atas. Tetapi dengan menggunakan kabin lift yang beratnya sudah berkurang sistem ini tidak bisa berfungsi karena sering terjadi slip, baik kabin lift naik atau turun. Secara keseluruhan, pemilihan ke tiga jenis varian di atas dapat dilihat dalam tabel 3.7.. 44.
(62) Tabel 3.7 Pemilihan Solusi Terbaik Selection Chart Kriteria Pemilihan:. Keputusan:. ( + ) Ya. ( + ) Solusi yang dicari. ( - ) Tidak. ( - ) Hapuskan Solusi. ( ? ) Kurang informasi. ( ? ) Kumpulkan Informasi. ( ! ) Periksa Speseifikasi. ( ! ) Lihat Spesifikasi Untuk Perubahan. Memenuhi tugas keseluruhan Memenuhi daftar kehendak Secara prinsip dapat diwujudkan Efisiensi waktu Sesuai dengan keinginan perancang Perawatan dengan keselamatan Biaya yang diijinkan Sv. A. B. C. D. E. F. G. V1. -. +. +. +. -. +. +. Penjelasan Tidak. Sesuai. Kep. keinginan. -. keinginan. +. keinginan. -. perancang V2. +. +. +. +. +. +. +. Sesuai perancangan. V3. -. -. +. +. -. +. +. Tidak. sesuai. perancang. 45.
(63) 3.5. Perancangan Wujud. 3.5.1. Prinsip Kerja Alat Pada sistem penggerak lift, slip sangatlah harus dihindari karena dengan. adanya slip maka kabin lift tidak akan bisa naik atau turun. Dengan menggunakan kabin lift yang beratnya sudah berkurang maka slip akan sering terjadi, sehingga untuk menghindari slip traction sheave akan di disain ulang untuk mampu menghindari slip dengan cara melilitkan tali baja ke traction sheave. Alat dibuat sebagai perwujudan dari sistem yang akan dibuat. Alat ini dibangun sesuai dengan lay out bangunan home lift dengan 4 lantai. Perbedaannya terletak pada motor dan adanya penambahan beban penyeimbang sehingga dibutuhkan ruang yang sangat besar untuk proses pemasangan. Oleh karena itu tidak semua ukuran yang telah ada di lay out dapat digunakan. Skala yang digunakan adalah 1 : 10. Sistem pengangkat home lift ini digerakkan oleh motor stepper yang juga menggerakkan desain traction sheave yang baru, dengan tali baja yang dililitkan pada traction sheave maka dapat menggerakkan kabin lift dan juga menggerakkan beban penyeimbang. Alat ini juga dilengkapi dengan mikrokontroller yang berfungsi untuk menggerakkan motor menuju lantai yang diinginkan, buka tutup pintu, dan komponen keselamatan.. 46.
(64) 3.5.2. Rancangan Tata Letak dan Bentuk Rancangan sistem penggerak home lift dengan menggunakan kabin lift yang. beratnya sudah berkurang adalah desain traction sheave yang seperti ulir, desain tersebut bertujuan untuk memperbanyak sudut kontak tali baja dengan traction sheave. Beberapa bagian rancangan sistem penggerak ini adalah traction sheave, deflection sheave, tali baja, motor lift, dan beban penyeimbang.. Gambar 3.3 Desain Sistem Penggerak Home Lift. 3.5.3 . Perancangan Detil Motor home lift Untuk menentukan motor yang digunakan disesuaikan dengan kemampuan. motor seperti daya angkut, kecepatan dan daya motor. Jenis motor yang digunakan adalah motor P-2000.. 47.
(65) Gambar 3.4 Motor home lift yang digunakan . Desain traction sheave Desain traction sheave ini berbeda dibandingkan dengan desain traction. sheave yang lainnya, traction sheave ini didesain seperti ini untuk memperbanyak sudut kontak antara tali baja dengan traction sheave, traction sheave ini didesain untuk menghindari peristiwa slip.. Gambar 3.5 Desain traction sheave. 48.
(66) . Desain Poros Poros yang digunakan adalah poros bertingkat. Hal tersebut dikarenakan. untuk mempermudah pemasangan traction sheave dan pemasangan bearing. Di bawah ini adalah rancangan poros.. Gambar 3.6 Desain Poros Bertingkat. . Desain Bearing pada poros Dalam perancangan suatu poros terdapat sebuah bearing yang berfungsi. untuk menahan gaya radial terhadap poros. Untuk ukuran diameter bearing, memakai diameter luar sebesar 100 mm dan diameter dalam 65 mm. Berikut gambar rancangan bearing.. 49.
(67) Gambar 3.7 Desain Bearing. . Pada sistem perancangan ini juga menggunakan mur, yang terletak pada. poros, berikut desain murnya.. Gambar 3.8 Desain mur. 50.
(68) . Pada sistem perancangan ini menggunakan beban penyeimbang, sehingga. dibutuhkan deflection sheave yang berfungsi untuk meneruskan tali baja menuju beban penyeimbang. Berikut desain deflection sheave.. Gambar 3.9 Desain deflection sheave. . Desain tali baja Desain tali baja untuk sistem pengangkat ini mengikuti bentuk traction. sheave. Tali baja akan dililitkan 1 kali pada traction sheave, berikut adalah desain tali baja.. 51.
(69) Gambar 3.10 Desain Tali Baja. . Desain beban penyeimbang Sistem penggerak home lift ini menggunakan beban penyeimbang untuk. meringankan kerja motor. Berikut desain beban penyeimbang.. Gambar 3.10 Desain beban penyeimbang 52.
(70) 3.6. Perwujudan Alat Pada bagian ini akan dijelaskan bagian-bagian dari alat yang sudah. diwujudkan. Rangka yang terdapat dalam gambar adalah rangka yang memuat komponen motor, komponen mikrokontroller dan komponen sistem penggerak. 1. Gambar 3.10 menunjukkan bagian rangka utama yang menopang seluruh alat, rangka utama terbuat dari besi siku dengan ukuran 5 cm x 5 cm dengan tebal 2 mm. Material satu dengan yang lain disambungkan dengan menggunakan las-lasan, dan rangka bagian bawah berfungsi untuk menyimpan komponen mikro kontroller.. Gambar 3.11 Rangka utama. 53.
(71) 2. Bagian atas rangka terdapat beberapa komponen sistem penggerak. Berupa motor stepper, traction sheave, deflection sheave, beban penyeimbang dan tali baja.. Gambar 3.12 Sistem penggerak 3. Untuk bagian atas terdapat pillow block dan bearing yang berfungsi sebagai tempat poros berputar. Terdapat 2 jenis pillow block dan bearing yaitu terletak pada traction sheave dan deflection sheave.. 54.
(72) Gambar 3.13 Pillow Block pada deflection sheave. Gambar 3.14 Pillow Block pada Traction Sheave. 55.
(73) 4. Untuk gambar dibawah ini menunjukkan posisi beban penyeimbang dan kabin lift dimana dapat bergerak naik – turun pada lintasannya. Kabin lift terhubung dengan beban penyeimbang melalui tali baja.. Gambar 3.15 Posisi Beban penyeimbang. 56.
(74) Gambar 3.16 Kabin Lift. Pembahasan mengenai hasil perhitungan dan desain sistem penggerak home lift akan dibahas pada BAB IV. 57.
(75) Mulai. Mendapatkan berat Kabin Lift. Merencanakan desain sistem pengangkat Home Lift. Tidak Menghitung semua komponen pendukung dalam sistem pengangkat Home Lift berupa Traction Sheave, Deflection Sheave dan Beban Penyeimbang. Apakah memenuhi persyaratan yang sesuai dengan konsep perancangan ?. Ya. Evaluasi dan pemilihan jenis (Mekanis dan Biaya). Realisasi wujud Prototype sistem pengangkat Home Lift. STOP. Gambar 3.17 Diagram alir perancangan. 58.
(76) BAB 4 PERHITUNGAN SISTEM. 4.1. Pembuktian Slip pada Home Lift. Pembuktian perhitungan ini bertujuan untuk menunjukkan adanya slip pada. sistem pengangkat lift. Salah satu faktor yang mempengaruhi peristiwa slip adalah berat kabin lift yang ringan. Slip terjadi ketika adanya gaya relatif yang ada pada traction sheave akibat bergeseknya tali baja pada traction sheave. Sehingga saat traction sheave berputar untuk menggerakkan kabin lift, tali baja tidak ikut berputar mengikuti arah putaran motor. 4.1.1. Perhitungan Hubungan Traksi. Traction Sheave. Deflection Sheave. T1. T2. To Car Hitch. To CWT hitch. Gambar 4.1 Desain Sistem Penggerak Home Lift 59.
(77) Untuk bagian ini akan dijelaskan proses perhitungan pada sistem yang lama dengan pembuktian adanya slip dan pembuktian pada sistem yang baru dengan tujuan untuk mengurangi terjadinya slip.. 4.1.1.1 Perhitungan Sistem Traksi Winding Drum Type Sistem pengangkat dengan menggunakan gulungan (winding drum type) merupakan sistem pengangkat dengan menggunakan gulungan. Sistem pengangkat gulungan merupakan sistem pengangkat pada home lift yang biasa digunakan pada perumahan. Dalam perhitungan hubungan traksi terdapat 2 jenis kondisi dalam perhitungan traksi, yaitu:. 4.1.1.1.1 Kondisi Kabin Lift Lebih Berat Dibandingkan Beban Penyeimbang Untuk kondisi kabin lift lebih berat dibandingkan beban penyeimbang, tali tegang (T1) terdapat pada kabin lift dengan beban penumpang penuh sedangkan untuk (T2) tali kendor terdapat pada beban penyeimbang.. 60.
(78) T1. T2. To Car Hitch. To CWT hitch. Gambar 4.2 Kabin lift lebih berat dibandingkan beban penyeimbang . T1 = P + Q. Keterangan: T1 = Gaya pada sisi tali tegang P = Berat kosong lift. (kg). Q = Kapasitas lift. (kg). Maka, T1 = 285,6 kg + 350 kg = 635,6 kg x 9,81 m/s2. 61.
(79) = 6235,23 N. . T2 = P + 50 % Q. Keterangan: T2 = Gaya pada sisi tali kendor P = Berat kosong lift. (kg). Q = Kapasitas lift. (kg). Maka, T2 = 285,6 kg + 0,5 x 350 kg = 460,6 kg x 9,81 m/s2 = 4518,486 N. = 1,379. 62.
(80) . Keterangan: ℮ = Bilangan natural. (2,718....). f = Konstanta tali kering. (0,11). Menggunakan bentuk alur U dengan undercut 90o maka didapat k = Konstanta bentuk ulir. (1,3). α = Sudut kontak. (2,79). Maka, 1,379 1,379. 1,19218. 1,379. 1,19218. Dari perhitungan diatas dapat disimpulkan bahwa berat kabin lift yang sudah berkurang dan ditambah dengan mengangkut beban maksimal dapat mengakibatkan slip pada sistem penggerak pada lift.. 63.
(81) 4.1.1.1.2 Kondisi Beban Penyeimbang Lebih Berat Dibandingkan Kabin Lift Untuk kondisi beban penyeimbang lebih berat dibandingkan kabin lift, tali tegang (T1) terdapat pada beban penyeimbang sedangkan untuk (T 2) tali kendor terdapat pada kabin lift yang tidak mengangkut beban.. T2. T1. To Car Hitch. To CWT hitch. Gambar 4.3 Beban penyeimbang lebih berat dibandingkan kabin lift. . T1 = P + 50 % Q. Keterangan: T1 = Gaya pada sisi tali tegang P = Berat kosong lift. (kg) 64.
(82) Q = Kapasitas lift. (kg). Maka, T1 = 285,6 kg + 0,5 x 350 kg = 460,6 kg x 9,81 m/s2 = 4518,486 N. . T2 = P. Keterangan: T2 = Gaya pada sisi tali kendor P = Berat kosong lift. (kg). Maka, T2 = 285,6 kg x 9,81 m/s2 = 2801,736 N. . 65.
(83) = 1,6127. Keterangan: ℮ = Bilangan natural. (2,718....). f = Konstanta tali kering. (0,11). Menggunakan bentuk alur U dengan undercut 90o maka didapat k = Konstanta bentuk ulir. (1,3). α = Sudut kontak. (2,79). Maka, 1,6127 1,6127. 1,19218. 1,6127. 1,19218. Dari. perhitungan. diatas. dapat. disimpulkan. bahwa. kondisi. beban. penyeimbang lebih berat daripada kabin lift yang tidak mengangkut beban maksimal juga dapat mengakibatkan slip pada sistem penggerak pada lift.. 66.
(84) 4.1.1.2 Perhitungan Sistem Traksi Menggunakan Sistem Penggerak Baru Sistem penggerak baru yang dimaksud adalah sistem penggerak pada lift yang berguna untuk menghindari slip dengan cara melilitkan tali baja pada traction sheave. Berikut akan dibuktikan dalam beberapa kondisi.. 4.1.1.2.1 Kondisi Kabin Lift Lebih Berat Dibandingkan Beban Penyeimbang Untuk kondisi kabin lift lebih berat dibandingkan beban penyeimbang, tali tegang (T1) terdapat pada kabin lift dengan beban penumpang penuh sedangkan untuk (T2) tali kendor terdapat pada beban penyeimbang.. T1. T2. To Car Hitch. To CWT hitch. Gambar 4.2 Kabin lift lebih berat dibandingkan beban penyeimbang . T1 = P + Q. 67.
(85) Keterangan: T1 = Gaya pada sisi tali tegang P = Berat kosong lift. (kg). Q = Kapasitas lift. (kg). Maka, T1 = 285,6 kg + 350 kg = 635,6 kg x 9,81 m/s2 = 6235,23 N. . T2 = P + 50 % Q. Keterangan: T2 = Gaya pada sisi tali kendor P = Berat kosong lift. (kg). Q = Kapasitas lift. (kg). Maka, T2 = 285,6 kg + 0,5 x 350 kg 68.
(86) = 460,6 kg x 9,81 m/s2 = 4518,486 N. = 1,379. Keterangan: ℮ = Bilangan natural. (2,718....). f = Konstanta tali kering. (0,11). Menggunakan bentuk alur U dengan undercut 90o maka didapat k = Konstanta bentuk ulir. (1,3). α = Sudut kontak. (9,42). Maka, 1,379. 69.
(87) 1,379. 3,076. Dari perhitungan diatas dapat disimpulkan bahwa dengan menggunakan sistem penggerak yang baru dalam kondisi berat kabin lift yang sudah berkurang dan ditambah dengan mengangkut beban maksimal dapat menghindari slip.. 4.1.1.2.2 Kondisi Beban Penyeimbang Lebih Berat Dibandingkan Kabin Lift Untuk kondisi beban penyeimbang lebih berat dibandingkan kabin lift, tali tegang (T1) terdapat pada beban penyeimbang sedangkan untuk (T 2) tali kendor terdapat pada kabin lift yang tidak mengangkut beban.. T2. T1. To Car Hitch. To CWT hitch. Gambar 4.3 Beban penyeimbang lebih berat dibandingkan kabin lift. 70.
(88) . T1 = P + 50 % Q. Keterangan: T1 = Gaya pada sisi tali tegang P = Berat kosong lift. (kg). Q = Kapasitas lift. (kg). Maka, T1 = 285,6 kg + 0,5 x 350 kg = 460,6 kg x 9,81 m/s2 = 4518,486 N. . T2 = P. Keterangan: T2 = Gaya pada sisi tali kendor P = Berat kosong lift. (kg). Maka, 71.
(89) T2 = 285,6 kg x 9,81 m/s2 = 2801,736 N. = 1,6127. Keterangan: ℮ = Bilangan natural. (2,718....). f = Konstanta tali kering. (0,11). Menggunakan bentuk alur U dengan undercut 90o maka didapat k = Konstanta bentuk ulir. (1,3). α = Sudut kontak. (2,79). Maka, 1,6127. 72.
(90) 1,6127. 3,076. Dari perhitungan diatas dapat disimpulkan bahwa dengan menggunakan sistem penggerak yang baru dalam kondisi beban penyeimbang lebih berat dibandinkan dengan kabin lift dapat menghindari slip pada sistem pengangkat lift. Setelah dilihat dari hasil perhitungan pada 2 kondisi tersebut maka dapat diambil suatu kesimpulan bahwa desain penggerak lift ini memang dapat menghindari slip dengan cara melilitkan tali baja sebanyak 1 kali sehingga memperbanyak sudut kontak tali baja.. 4.2. Biaya Listrik Perhitungan ini dilakukan untuk mengetahui biaya listrik yang digunakan. dalam satu bulan dengan desain pengangkat home lift tanpa menggunakan beban penyeimbang.. 4.2.1. Daya Keluaran Motor. Keterangan: Q = Kapasitas lift. (kg). 73.
(91) V = Kecepatan nominal lift. (m/min). OB = Faktor Keseimbangan. ηT = Efisiensi total sistem = η1 x η2 x η3. , Keterangan:. η1 = Efisiensi Tarikan η2 = Efisiensi Mesin η3 = Efisiensi Motor = 0,90 x 0,8 x 0,97 = 0,6984. Maka,. = 2,45 kW. 74.
(92) 4.2.2 Biaya Listrik Asumsi: a) Beban pada kereta 100 % karena tidak memakai beban penyeimbang b) Jam kerja efektif = 10 jam /sehari c) 1 tahun = 365 hari d) Tarif PLN = Rp. 10.000,- / kWH Biaya Listrik = Pout x OB x Jam kerja x 1 Tahun x Rp. 10.000,-/1 kWh = 2,24 kW x 1 x 10 x 365 x Rp. 795,= Rp. 7.109.287,5,Dalam 1 bulan = Rp. 592.440,625,-. 4.3. Perancangan Sistem Pengangkat Home Lift yang Baru Sesuai dengan yang tercantum dalam SNI (Standar Nasional Indonesia) untuk. perancangan home lift dengan nomor SNI 03 – 6247 2 – 2000. Tali baja yang digunakan adalah tali baja dengan diameter 8 mm.. 4.3.1. Diameter Tali Baja Menurut buku Rudenko hal.74 Tabel 17 dengan diameter tali baja 8 mm,. maka S2= 12,44 dan C2 = 6,22. 75.
(93) 4.3.2. Tarikan Kerja Maksimum Pada Tali Baja. Keterangan: ƞ = Jumlah muatan tali = Efisiensi puli. 1. = Efisiensi yang disebabkan kerugian tali. Maka,. = 681,98 kg. 4.3.3. Luas Penampang Tali Baja, Tali baja yang Digunakan 8 x 19. Keterangan: k = Faktor keamanan tali. 76.
(94) σb = Kekuatan putus tali. (kg/mm2). Dmin/d = 25 E = Modulus elastisitas. (kg/cm2). I = Jumlah kawat dalam tali. Maka,. = 1,057 cm2. 4.3.4. Kekuatan Putus Tali P = A x σb. Keterangan: σb = Kekuatan putus tali. (kg/mm2). Maka, P = 105,7 mm2 x 190 kg/mm2 = 20.083 kg. 77.
(95) 4.3.5. Nilai Beban Pada Putus Tali. Keterangan: k = Faktor keamanan. Maka,. S. = 2510,375 kg. S > Sw 2510,375 kg > 681,98 kg Dengan ini didapat tarikan beban putus penuh pada tali sebesar 2510,375 kg, sehingga penggunaan tali dengan kekuatan putus tali σ b = 190 kg / mm2 dan safety factor yang digunakan untuk beban k = 8, dapat digunakan. 4.3.6. Perhitungan Diameter Drum Diameter dalam Drum D = 25 x d 78.
(96) Keterangan: D = Diameter dalam drum (mm) 25 = NB (Number of Bent) d = Diameter tali baja. Maka, D = 25 x d = 25 x 8 mm = 200 mm. . Diameter luar drum D = 26,5 x d = 26,5 x 8 mm = 212 mm. 4.3.7. Jumlah Lilitan Pada Tiap Sisi Drum. Keterangan: Z = Jumlah liitan H = Tinggi angkat. (mm). 79.
(97) Maka,. Z = 38 lilitan Jadi untuk banyak lilitan sepanjang drum adalah 38 lilitan x 2 = 76 lilitan. 4.3.8. Tebal Dinding Drum yang Digunakan ω = 0,02 D + 1 cm = 0,02 x 212 mm + 10 mm = 14,24 mm. 4.3.9. Perhitungan Panjang Total Drum. Keterangan: L = Panjang total drum. (mm). S = Kisar alur heliks. (mm). L. 80.
(98) = 528 mm x 2 = 1.056 mm Total panjang drum ditambah dengan jarak antar ulir sebesar 100 mm, sehingga panjang total drum adalah 1206 mm.. 4.3.10 Pengujian Tegangan Tekan. = 384,982 kg / cm2. σiijin ST 37 adalah 110 MPa. σiijin > 1100 kg / cm2 > 384,982 kg/cm2 Perancangan Aman. 4.3.11 Mesin traksi yang digunakan Motor tipe P4 – 2000 Speed = 30 m/min Duty load = 320 kg. 81.
(99) Roping = 1:1 Ratio = 1/25 Motor = 2 HP CP 208/415 V Main Sheave =. - Diameter = 280 = 320 - Ropes = 8 x 4V =1x3V. Max static load = 2000 kg. Gambar 4.4 Dimensi Motor yang Digunakan. 82.
(100) 4.3.12 Perhitungan dan Perancangan Pada Poros Bertingkat Terdapat 2 profil poros yang berbeda pada poros puli, sehingga untuk menentukan diameter profil menggunakan rumus berikut: dengan asumsi sudut puntir tidak melebihi 1o.. σijin =. = 33 Mpa. =. τijin =. = 20 Mpa. =. 4.3.12.1. Menghitung Diameter Poros Kecil 1) n = 73,42 rpm = 73,42 x. rad/s. = 2,447 π rad/s. 2). T=. Keterangan: P = Daya keluaran motor. (W) 83.
(101) T=. Nm/s = 97,3 Nm. Berdasarkan Tegangan. τmaks =. 66,7 Mpa =. R = 9,756 ≈ 10 mm D = 2 x 10 mm = 20 mm. Berdasarkan Sudut puntir. ɵmax = 1o = =. rad. rad. ɵ=. rad =. r = 0,96 mm 84.
(102) D = 2 x 0,96 mm = 1,92 ≈ 2 mm Setelah dilihat dari hasil perhitungan dapat ditarik kesimpulan bahwa diameter yang cocok untuk poros adalah berdiameter 20 mm, akan tetapi pada perancangan poros, dimeter yang digunakan adalah berdiameter 65 mm.. 4.3.12.2. Menghitung Diameter Poros Besar Berdasarkan tegangan. τmaks =. 66,7 Mpa =. R = 9,756 ≈ 10 mm D = 20 mm. Berdasarkan Sudut puntir 1) ɵmax = 1o = = 2). rad. rad. ɵ=. 85.
(103) rad =. r = 15 mm D = 30 mm Setelah dilihat dari hasil perhitungan dapat ditarik kesimpulan bahwa diameter yang cocok untuk poros adalah berdiameter 30 mm, akan tetapi pada perancangan poros, dimeter yang digunakan adalah berdiameter 100 mm.. Diameter 65 mm. Diameter 100 mm. Gambar 4.5 Desain Poros Bertingkat. 86.
(104) DBB pada poros: keterangan: Panjang:. Diameter:. A-B = C-D = 20 mm. A-B = C-D = 65 mm. B-C = 1250 mm. B-C = 100 mm. 7.703 N. A. B. C. Ay. D. Dy. Gambar 4.6 DBB poros bertingkat. 4.3.12.3. Total Berat Pada Poros mpuli + mkabin lift + mbeban penyeimbang = 285,6 kg + 460,6 kg+266,725 kg = 1012,925 kg. 87.
(105) 4.3.12.4. Gaya yang Bekerja Pada Poros F=mxg (m/s2). Dengan: g = percepatan gravitasi. F = 1012,925 kg x 9,81 m/s2 = 9.936,794 N ≈ 9.937 N. 4.3.12.5. Distribusi Gaya Merata Pada Poros. Fgaya merata = Dengan :. L = panjang poros. (m). Fgaya merata = = 7.703,1 N ≈ 7.703 N/m. 4.3.12.6. Reaksi Tumpuan ΕMAy = - F x r + Dy x r 0 = - 7.703 N x 0,625 m + Dy x 1,296 m 0 = - 4.814,375 Nm + Dy x 1,296 m. 88.
(106) Dy = 3.714,79 N. 3.715 N. Karena gaya 7.703 N/m terletak di tengah-tengah poros maka reaksi tumpuan pada A dan D sama, yaitu sama sebesar 3.715 N.. Tata ulang gaya yang bekerja pada poros: Keterangan: Panjang:. Diameter:. A-B = C-D = 20 mm. A-B = C-D = 65 mm. B-C = 1250 mm. B-C = 100 mm. 7.703 N. A. B. 3.834 N. D. C. 3.834 N. Gambar 4.7 Tata Ulang Gaya yang bekerja pada poros. 89.
(107) 4.3.12.7. Diagram Gaya Momen Lentur. y (+). x. 3715 N. 3715 N. Gambar 4.8 Diagram Momen Lentur. Tegangan tekuk (σ). σ=. =. = = 24,99 Mpa ≈ 25 Mpa. σijin > σ 33 Mpa > 25 Mpa. 90.
(108) 4.3.12.8. Diagram Gaya Geser. y. 3.715 N (+) x. Gambar 4.9 Diagram Gaya Geser. τ= τ=. = 0,75 Mpa. τ ijin > τ 20 Mpa > 0,75 Mpa. 4.3.13. Perencanaan Bearing Pada Poros Bearing yang akan digunakan adalah bearing dengan diameter dalam 65 mm dan diameter luar 100 mm. Bearing akan dipasang pada poros yang berguna untuk meredam gaya radial pada poros.. 91.
(109) Gambar 4.10 Bearing Pada Poros Bertingkat. 4.3.14 Biaya Listrik yang Digunakan Setelah melakukan perhitungan untuk merancang sistem pengangkat home lift maka akan dilakukan perhitungan untuk daya keluar motor dan biaya penggunaan listrik. a. Kecepatan yang digunakan pada home lift sesuai dengan SNI 036247.2-2000 adalah minimal 20 m/min, sesuai dengan spesifikasi motor kecepatan lift adalah 30 m/min b. Faktor keseimbangan (overbalace atau OB) adalah 0,5. Sehingga berat bobot penyeimbang adalah 460,6 kg c. Lift berkapasitas 350 kg d. Berat kosong lift 285,6 kg. 92.
(110) 4.3.14.1. Daya Keluaran Motor. Keterangan: Q = Kapasitas lift. (kg). V = Kecepatan nominal lift. (m/min). OB = Faktor Keseimbangan. ηT = Efisiensi total sistem = η1 x η2 x η3. , keterangan:. η1 = Efisiensi Tarikan η2 = Efisiensi Mesin η3 = Efisiensi Motor = 0,90 x 0,8 x 0,97 = 0,6984. 93.
(111) = 1,228 kW ≈ 1,23 kW. 4.3.14.2. Biaya Listrik Asumsi: a. Jam kerja efektif = 10 jam /sehari b. 1 tahun = 365 hari c. Tarif PLN = Rp. 10.000,- / kWH. Biaya Listrik = 1,23 kW x 0,5 x 10 x 365 x Rp. 795,= Rp. 1.784.576,25,Dalam 1 bulan = Rp. 148.714,6875,-. 94.
(112) BAB 5 KESIMPULAN DAN SARAN. 5.1. Kesimpulan Berdasarkan pada hasil yang didapat dari perancangan serta perhitungan. maka dapat diambil kesimpulan sebagai berikut: 1. Telah berhasil merancang dan membuat sistem pengangkat home lift berupa perancangan kabin lift, ruang luncur, traction sheave, deflection sheave, deflection sheave, dan tali baja dengan menambahkan sistem penyeimbang dan menghindari terjadinya slip. 2. Tinggi angkat home lift ini 11.800 m atau tinggi bangunan dengan 3 lantai, dan mampu mengangkat beban 350 kg atau mampu menahan beban sampai 3-4 orang. 3. Berdasarkan hasil perhitungan serta pengujian alat, sistem pengangkat model home lift ini dinyatakan pada kondisi awal. 4. Mampu mendesain suatu sistem pengangkat pada home lift yang berguna untuk mengurangi biaya pemakaian listrik.. 5.2. Saran 1. Mendesain ulang deflection sheave sehingga mampu menahan tali baja tetap di traction sheave. 95.
(113) 2. Mampu menyamakan tegangan T1 dan T2 sehingga tali baja tetap berada di traction sheave.. 96.
Gambar
![Gambar 2.3 Types of lay [4]](https://thumb-ap.123doks.com/thumbv2/123dok/4442843.2971822/28.893.247.711.577.940/gambar-types-of-lay.webp)
![Gambar 2.4 Konstruksi Tali Baja [4]](https://thumb-ap.123doks.com/thumbv2/123dok/4442843.2971822/30.893.283.610.577.948/gambar-konstruksi-tali-baja.webp)
![Tabel 2.2 Jumlah Lengkungan [4]](https://thumb-ap.123doks.com/thumbv2/123dok/4442843.2971822/32.893.198.749.351.689/tabel-jumlah-lengkungan.webp)
![Tabel 2.3 Dimensi Alur Drum [4]](https://thumb-ap.123doks.com/thumbv2/123dok/4442843.2971822/39.893.176.789.173.392/tabel-dimensi-alur-drum.webp)
+7
![Gambar 2.6 Posisi T 1 dan T 2 [2]](https://thumb-ap.123doks.com/thumbv2/123dok/4442843.2971822/48.893.197.774.177.593/gambar-posisi-t-dan-t.webp)
Garis besar
Dokumen terkait
Dari perhitungan persentase perbaikan dengan menggunakan uji hipotesis diatas, maka dapat disimpulkan bahwa terjadi peningkatan kualitas kuat tekan bata tras kapur
Berdasarkan hasil perhitungan diatas, maka dapat disimpulkan bahwa kedua rata – rata populasi adalah tidak identik atau rata – rata populasi berat badan sebelum minum obat dan
Pada kondisi di mana garis depresi mendekati bentuk horizontal, maka dalam perhitungan langsung dapat dianggap horizontal dan berat bagian tubuh embung yang terletak dibawah
Dari beberapa pengertian diatas, maka dapat disimpulkan bahwa, gulma adalah segala tumbuhan tingkat tinggi yang mampu hidup pada kondisi paling berat dan
Dari perhitungan persamaan Thomas diatas juga dapat disimpulkan bahwa kapasitas adsorbansi tertinggi dalam penyerapan Fe dan Mn pada berat yang sama yaitu 80 gram dengan jenis karbon
