Pengendalian Level Coupled Tank Menggunakan Metode Sliding Mode
Control (SMC) Hybrid Proportional Integral Derivative (PID)
di Simulink Matlab
Ahmad Faizal
Jurusan Teknik Elektro, Fakultas Sains dan Teknologi, UIN Suska Riau Jl. HR. Soebrantas No. 155 Simpang Baru, Panam, Pekanbaru, 28293
Email: [email protected]
(Received: 7 Januari 2016; Revised: 17 Februari 2016; Accepted: 4 Februari 2016)
ABSTRAK
Dalam dunia industri kimia, Coupled Tank sangat penting terutama untuk proses-proses pencampuran beberapa fluida. Coupled Tank merupakan tangki yang terdiri atas dua atau lebih tangki yang saling terhubung. Ada berbagai macam sistem pengendali diataranya Proportional Integral Derivative (PID),
Sliding Mode Control (SMC), dan sebagainya. Pada penelitian ini membandingkan pengendali SMC, PID,
dan SMC hybrid PID pada sistem level Coupled Tank. Simulasi dilakukan dengan parameter yang sama. Untuk nilai parameter PID digunakan nilai Kp= 10000, Ki= 0.1, Kd= 0.1 sedangkan SMC digunakan konstanta K=80 dan =0,15. Penggunaan parameter yang sama membuat hasil simulasi pengendali SMC
hybrid PID tidak mampu mendapatkan nilai set point yang diinginkan.. Namun penggunaan nilai parameter
yang berbeda mampu memberikan nilai respon transien yang lebih cepat dibandingkan pengendali PID dan SMC, dengan menggunakan nilai parameter Kp= 3, Ki= 0.1, Kd= 0.1, dan parameter K=320 dan =0,05.
Kata Kunci: Coupled Tank, Level, Proportional Integral Derivative (PID), Sliding Mode Control (SMC)
ABSTRACT
In the chemical industry, Coupled Tank are very important especially for mixing multiple fluid. Coupled Tank is a tank which consist of two part or more tanks are interconnected. There are a wide variety of control system including Proportional Integral Derivative (PID), Sliding Mode Control (SMC), and so on. In this research will analyze the comparative controller SMC, PID, and SMC PID Hybrd on Coupled Tank system. simulation performed with the same parameters. For PID Parameters values used Kp= 10000, Ki=
0.1, Kd= 0.1.Where as for SMC parameter used K=80 dan =0,15. Using the same parameters, make the
result of simulation from controller SMC PID hybrid not able to get the desired setpoint value. But using different parametersa the simulation be able to get the setpoint value more faster as PID or SMC controller, by Using parameter value Kp= 3, Ki= 0.1, Kd= 0.1, dan K=320 dan =0,05.
Keywords: Coupled Tank, Level, Proportional Integral Derivative (PID), Sliding Mode Control (SMC). Corresponding Author:
Ahmad Faisal
Jurusan Teknik Elektro, Fakultas Sains dan Teknologi, UIN Suska Riau
Email: [email protected]
Pendahuluan
Seiring berkembangnya teknologi instrumentasi pada industri, serta tuntutan terhadap keberhasilan sistem melakukan proses kerjanya agar produksi tetap tercapai perlu
dilakukan pengendalian, yang tujuannya adalah agar sistem dapat menjaga kestabilannya dalam suatu proses yang sedang berlangsung secara efektif dan efisien. ada banyak pengendalian yang harus dikendalikan dalam suatu proses di industri, diantaranya pressure, flow, temperature,
dilakukan diharapkan dapat mempertahankan life
time unit, memudahkan kerja manusia, mengurangi biaya perawatan, mendapatkan kualitas produksi yang baik, keselamatan dan keamanan lingkungan proses.
Dalam dunia industri yang melibatkan fluida, pengolahan cairan sering melibatkan beberapa jenis tangki, ada jenis tangki yang tidak terhubung dengan tangki yang lain (Singgle
Tank), dan ada pula yang tersusun dari beberapa
tangki (Coupled Tank).
Metode Penelitian
Coupled Tank
Coupled Tank merupakan tangki yang
biasanya terdiri atas dua atau lebih tangki yang saling terhubung. Tangki ini banyak digunakan dalam dunia industri pengolahan fluida untuk mencampur beberapa bahan kimia. Coupled Tank
yang digunakan yaitu Level and Flow Process Rig 38-100.
Gambar 1. Level and Flow Process Rig 38-100 Identifikasi Loop Tertutup
Penggunaan pengendali proporsional pada identifikasi loop tertutup membantu mendapatkan model matematika plant untuk model identifikasi
loop terbuka. Sehingga mendapatkan persamaan
sebagai berikut (okky, 2012) :
0 2 2 0 1
)
(
b
s
b
a
s
a
s
G
t
(1))
(
)
(
.
1
)
(
.
)
(
)
(
s
G
s
G
K
s
G
K
s
R
s
Y
T p p
)
(
.
)
(
.
).
(
)
(
s
G
s
K
G
s
K
G
s
G
T
T p
pMaka model matematika pant adalah sebagai berikut:
)]
(
1
[
)
(
)
(
s
G
K
s
G
s
G
T p T
(2)Identifikasi Metode Strejc
Strejc merupakan metode identifikasi
dengan cara menarik garis singgung pada titik belok respon step plant dalam domain waktu. Tabel 1. Tabel untuk Parameter dengan Identifikasi
Strejc (leonardus, 2012) N
T
T
uT
T
u a uT
T
1 1,000 0,000 0,000 2 2,718 0,282 0,104 3 3,695 0,805 0,218 4 4,463 1,425 0,319 5 5,119 21,000 0,410Berdasarkan tabel diatas dengan parameter-parameter persamaan matematika dengan metode strecj adalah sebagai berikut:
n s T
Ts
e
K
s
G
)
1
(
)
(
(
3)Pengendali Proporsional Integral Derivative (PID)
Pengendali PID merupakan pengendali otomatis yang yang merupakan gabungan dari pengendali Proporsional, Integral, dan Derivatif. Bentuk umum dari pengendali PID sebagai berikut:
dt
de
K
dt
t
e
K
t
e
K
t
u
p
i
t
d 0 (4)Sliding Mode Control (SMC)
SMC merupakan pengendali berumpan balik dengan pensaklaran berkecepatan tinggi (high speed switching feedback), sehingga dalam proses SMC mengalami chattering yang dapat menggangu kestabilan sistem (Putranto,2010)
Gambar 2. Fenomena Chattering Effect Beberapa cara untuk mengurangi
chattering adalah dengan memperluas fungsi
signum menjadi saturasi, atau mengganti fungsi signum dengan arcus tangen (Andriarti,2014).
Perancangan Permukaan Luncur
Slotine (1985) dalam penelitiannya menuliskan bahwa perancangan permukaan luncur dapat dirumuskan dengan persamaan awal sebagai berikut:
(5) Dimana u merupakan input kendali, x merupakan faktor keadaan, f(x,t) dan b(x,t) berupa fungsi terbatas, d(t) gangguan eksternal. Jika xd merupakan x yang diinginkan maka
tracking errornya dapat dinyatakan dengan :
(t)
Fungsi swicthing yaitu permukaan S(x,t) didalam ruang keadaan Rn , memenuhi persamaan (Slotine, 1985) :
(6)
Dengan 𝜆 berupa konstanta positif. Dimana fungsi swicthing ini digunakan untuk menentukan besarnya nilai u agar memenuhi kondisi sliding.
Permukaan luncur (sliding surface) merupakan persamaan yang memenuhi :
(7) Besar nilai control input pada SMC bergantung pada nilai S, sehingga memenuhi pertidaksamaan yang disebut kondisi sliding. kondisi tersebut ditulis dalam bentuk sebagai berikut : (8) Keterangan : S = Permukaan luncur 𝜆 = Konstanta Positif n = Orde Sistem e = Error Sinyal Kendali
Untuk mendapatkan suatu sinyal kendali yang mampu membawa status trayektori menuju permukaan luncur dan mempertahankan status
trayektori tetap berada di sekitar permukaan
luncur, diperlukan dua macam sinyal kendali, yaitu sinyal kendali ekivalen yang berfungsi untuk membawa status trayektori menuju permukaan luncur (ueq) dan sinyal kendali natural yang berfungsi untuk mempertahankan status trayektori agar tetap berada di sekitar permukaan luncur
(un).Sinyal kendali total pada SMC adalah sebagai berikut : N eq
u
u
u
(9) Proses identifikasi menggunakan metode Strejc Pemodelan matematika untuk loop tertutup dalam kondsi beban nominal sesuai dengan metode Strejc pada persamaan 1 adalah:2 5216 , 0
)
1
8904
,
10
(
0529
,
1
)
(
s
e
s
G
s T1
7808
,
21
6008
,
118
0529
,
1
5492
,
0
)
(
2
s
s
s
s
G
TLangkah yang sama dilakukan terhadap kondisi beban maksimal dan minimal, hasil model
plant pada loop tertutup adalah terdapat pada
tabel 2 berikut:
Pemodelan Loop terbuka
Mengacu data dari peneliti sebelumnya, yang melakukan perhitungan pada modul Level
and Flow Process Rig 38-100, kemudian
dilakukan identifikasi dengan metode Srejc terhadap grafik yang didapatkan untuk loop terbuka, hasil perhitunganannya adalah sebagai berikut :
Tabel 2. Pembebenan level Nominal, Maksimal dan Minimal loop terbuka (okky,2012)
Desain Pengendali Sliding Mode
Fungsi transfer plant Coupled Tank dimisalkan menjadi fungsi transfer dimana koefisien numerator dan denumerator dimisalkan menjadi variabel yang bernilai tetap. Maka fungsi transfer plant menjadi:
w
qs
ps
b
as
s
U
s
Y
s
G
2)
(
)
(
)
(
(10) Dengan nilai: a=1,6026, b=3,0724, p=1211,7659, q=217,7307, w=1 Beban Model Nominal 1 7808 , 21 6008 , 118 0529 , 1 5492 , 0 ) ( 2 s s s s GT Maksimal 1 2258 , 27 3111 , 185 9329 , 0 8881 , 0 ) ( 2 s s s s GT Minimal 1 3958 , 18 6014 , 84 0571 , 1 4228 , 0 ) ( 2 s s s s GT Nominal 1 7307 , 217 1211,7659s 3,0724 1,6026s ) ( 2 s s G Maksimal 1 + 131,8698s 923,3721s 1,3276 + 1,2638s ) ( 2 s G Minimal 1 + 191,2851s 897,3820s 3,2024 + 1,3414s ) ( 2 s GKemudian direpresentasikan dalam bentuk persamaan diferensial sebagai berikut:
bu
u
a
wy
y
q
y
p
u
p
b
u
p
a
y
p
w
y
p
a
x
y
(11)Kemudian, ambil sinyal error sebagai variabel
state
e
x
1
e
x
x
2
1
Persamaan untuk sinyal error adalah:
y
r
x
y
r
e
1
Karena setpoint tetap (permasalahan reference), maka:
y
x
x
1
2
y
x
x
1
2
Sehingga:r
p
w
u
p
b
x
p
q
x
p
w
u
p
a
x
2
1
2
Sehingga didapatkan persamaan state-space:
p
q
p
w
u
p
a
x
x
0
1
2 1
r
p
b
u
p
b
x
x
0
0
2 1 (12) Misalkan: 1 1x
z
u
p
a
x
z
2
2
p
q
p
w
z
z
0
1
2 1
r
p
w
u
p
bp
ap
p
a
z
z
0
2 2 1 (13)Didefinisikan suatu permukaan luncur:
0
e
e
s
0
2 1
ae
x
s
DimanaMaka akan dapat dicari sinyal kendali ekivalen dengan asumsi bahwa sinyal kendali natural adalah nol, sehingga:
0
0
2 1
x
x
eq eqap
q
x
wx
wr
a
u
b
u
1
2
1
(14)Setelah didapat sinyal kendali ekivalen maka dapat ditemukan sinyal kendali natural sebagai berikut: N N
x
x
a
u
b
sat
K
u
.
1
(
1
2)
(15) dimanaDengan demikian didapat untuk sinyal kendali total adalah sebagai berikut:
N eq
u
u
u
ap
q
x
wx
wr
a
u
equ
Nb
u
1
2 1
a
x
x
b
sat
K
.
1
(
1
2)
(16)Parameter pengendali Sliding Mode pada penelitian ini adalah:
K=80 =0,15
Angka tersebut dipilih berdasarkan hasil
trial and error.
Persamaan (15) merupakan sinyal total hasil penjumlahan dari sinyal kendali ekivalen dan natural yang didesain menggunakan metode SMC di simulink matlab.
Desain Pengendali Proportional Integral Derivative (PID)
Bentuk umum persamaan pengendali PID adalah sebagai berikut:
dt
de
K
dt
t
e
K
t
e
K
t
u
d t i p
(
)
(
)
)
(
0 (17)Gambar 4. Sub blok pengendali PID Untuk mengetahui respon sistem pengendalian level Coupled Tank perlu dilakukan simulasi. Penalaan parameter pengendali
dilakukan secara trial and error hingga mendapatkan respon yang paling baik, dengan menetapkan nilai Kp= 10000, Ki= 0.1, Kd= 0.1.
Desain Pengendali SMC hybrid PID
Hybrid antara SMC dan PID merupakan
hasil rancangan SMC pada Coupled Tank ditambahkan rancangan PID, penggabungan ni diharapkan mampu memberikan keluaran yang lebih stabil dengan menetapkan nilai Kp= 10000, Ki= 0.1, Kd= 0.1. Sehingga didapatkan rumus sebagai berikut:
ap
q
x
wx
wr
a
u
eqb
u
1
2
1
+)
(
)
(
1
.
x
1x
2a
u
Kpe
t
b
sat
K
N
dt
t
e
Ti
Kp
t)
(
0
(18)Analisa dan Hasil
Analisa pengendali SMC untuk Mencapai
Setpoint pada Level Coupled Tank
Analisa pengendalian level coupled tank mengggunakan pengendali SMC pada ketiga pembebanan yaitu nominal, minimal, dan maksimal menggunakan parameter plan untuk nilai K=320 dan =0,05. Pengendalian level
Coupled Tank mengggunakan pengendali SMC
pada beban nominal adalah sebagai berikut:
Gambar 5. Diagram blok pengendalian Level Coupled
Tank menggunakan SMC pada beban Nominal
Gambar 6. Grafik simulasi pengendalian Level Coupled
Tank menggunakan SMC pada beban nominal
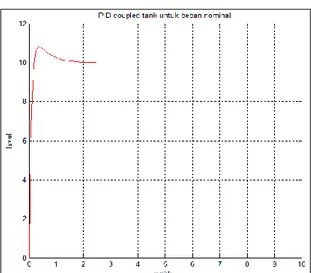
Dari grafik beban nominal gambar 4.2 diatas dapat dijelaskan bahwa nilai output mencapai titik puncak pada ketinggian 10,205 meter, dan dapat mencapai keadaan tunak setpoint
pada detik ke 2. Nilai respon transien grafik tersebut adalah: delay time (td) = 0,149 detik, rise time (tr) 5% ke 95% = 0,2615 detik, peak time (tp) = 0,33 detik, settling time (ts) = 0,326 detik dan Error steady state (ess) = 10-10 = 0 %
Analisa pengendali Proporsional Integral Derifative (PID) untuk Mencapai Setpoint pada
Level Coupled Tank
Analisa pengendalian level coupled tank mengggunakan pengendali PID dilakukan dengan metode trial and error dengan menetapkan nilai Kp= 10000, Ki= 0.1, Kd= 0.1. Diagram blok dan grafik untuk beban nominal adalah sebagai berikut:
Gambar 7. Diagram blok pengendalian Level
Coupled Tank menggunakan PID pada beban
Nominal
Gambar 8 Grafik simulasi pengendalian Level Coupled
Tank menggunakan PID pada beban nominal
Dari grafik beban nominal gambar 8 diatas dapat dijelaskan bahwa nilai output mencapai titik puncak pada ketinggian 10,816 meter, dan dapat mencapai keadaan tunak setpoint pada detik ke 2,52. Nilai respon transien grafik tersebut adalah:
delay time (td) = 0,05 detik, rise time (tr) 5% ke 95% = 0,159 detik, peak time (tp) = 0.352 detik, settling time (ts) = 1,09 detik dan Error steady state (ess) = 10-9,982=0,018/0,00982= 0.183 %
Analisa pengendali SMC hybrid PID untuk Mencapai Setpoint pada Level Coupled Tank
Analisa pengendalian level coupled tank mengggunakan pengendali SMC hybrid PID dilakukan metode trial and error dengan
dengan pengendali PID saja yaitu Kp= 10000, Ki= 0.1, Kd= 0.1. Diagram blok dan grafik untuk beban nominal adalah sebagai berikut:
Gambar 9 Diagram blok pengendalian Level Coupled
Tank menggunakan SMC hybrid PID pada beban
Nominal
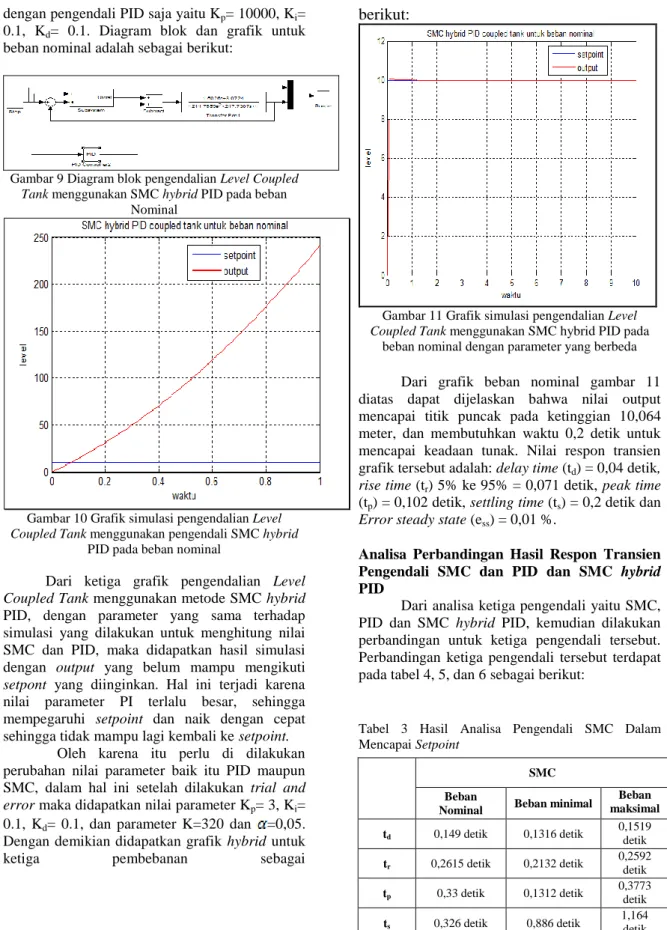
Gambar 10 Grafik simulasi pengendalian Level
Coupled Tank menggunakan pengendali SMC hybrid
PID pada beban nominal
Dari ketiga grafik pengendalian Level
Coupled Tank menggunakan metode SMC hybrid
PID, dengan parameter yang sama terhadap simulasi yang dilakukan untuk menghitung nilai SMC dan PID, maka didapatkan hasil simulasi dengan output yang belum mampu mengikuti
setpont yang diinginkan. Hal ini terjadi karena
nilai parameter PI terlalu besar, sehingga mempegaruhi setpoint dan naik dengan cepat sehingga tidak mampu lagi kembali ke setpoint.
Oleh karena itu perlu di dilakukan perubahan nilai parameter baik itu PID maupun SMC, dalam hal ini setelah dilakukan trial and
error maka didapatkan nilai parameter Kp= 3, Ki= 0.1, Kd= 0.1, dan parameter K=320 dan =0,05. Dengan demikian didapatkan grafik hybrid untuk
ketiga pembebanan sebagai
berikut:
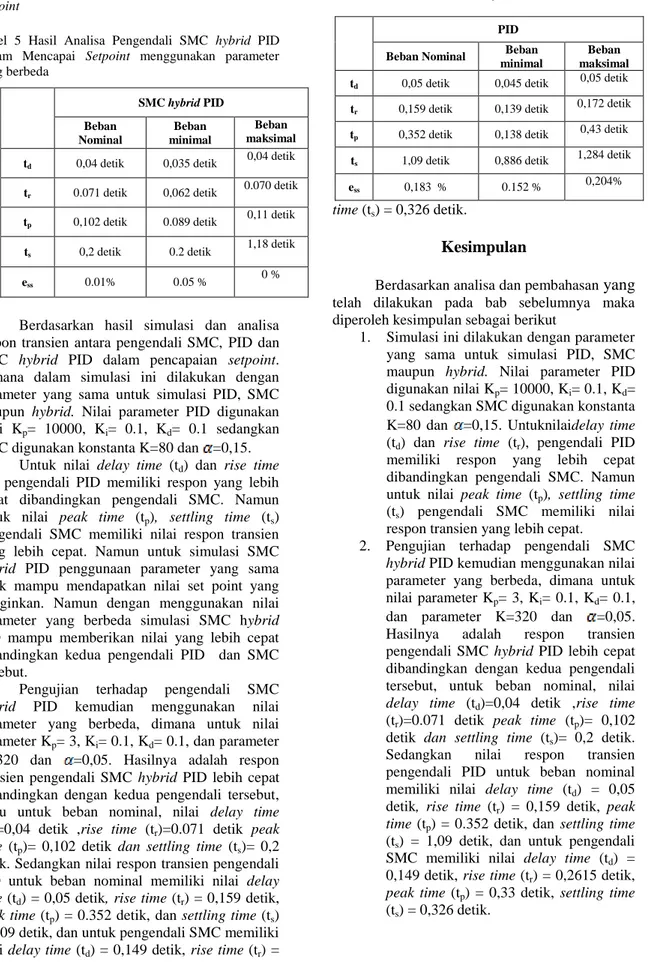
Gambar 11 Grafik simulasi pengendalian Level
Coupled Tank menggunakan SMC hybrid PID pada
beban nominal dengan parameter yang berbeda Dari grafik beban nominal gambar 11 diatas dapat dijelaskan bahwa nilai output mencapai titik puncak pada ketinggian 10,064 meter, dan membutuhkan waktu 0,2 detik untuk mencapai keadaan tunak. Nilai respon transien grafik tersebut adalah: delay time (td) = 0,04 detik, rise time (tr) 5% ke 95% = 0,071 detik, peak time (tp) = 0,102 detik, settling time (ts) = 0,2 detik dan Error steady state (ess) = 0,01 %.
Analisa Perbandingan Hasil Respon Transien Pengendali SMC dan PID dan SMC hybrid PID
Dari analisa ketiga pengendali yaitu SMC, PID dan SMC hybrid PID, kemudian dilakukan perbandingan untuk ketiga pengendali tersebut. Perbandingan ketiga pengendali tersebut terdapat pada tabel 4, 5, dan 6 sebagai berikut:
Tabel 3 Hasil Analisa Pengendali SMC Dalam Mencapai Setpoint
SMC Beban
Nominal Beban minimal
Beban maksimal td 0,149 detik 0,1316 detik 0,1519 detik tr 0,2615 detik 0,2132 detik 0,2592 detik tp 0,33 detik 0,1312 detik 0,3773 detik ts 0,326 detik 0,886 detik 1,164 detik ess 0 % 0.05 % 0.01 %
Tabel 4 Hasil Analisa Pengendali PID Dalam mencapai
setpoint
Tabel 5 Hasil Analisa Pengendali SMC hybrid PID Dalam Mencapai Setpoint menggunakan parameter yang berbeda
Berdasarkan hasil simulasi dan analisa respon transien antara pengendali SMC, PID dan SMC hybrid PID dalam pencapaian setpoint. Dimana dalam simulasi ini dilakukan dengan parameter yang sama untuk simulasi PID, SMC maupun hybrid. Nilai parameter PID digunakan nilai Kp= 10000, Ki= 0.1, Kd= 0.1 sedangkan SMC digunakan konstanta K=80 dan =0,15.
Untuk nilai delay time (td) dan rise time (tr), pengendali PID memiliki respon yang lebih cepat dibandingkan pengendali SMC. Namun untuk nilai peak time (tp), settling time (ts) pengendali SMC memiliki nilai respon transien yang lebih cepat. Namun untuk simulasi SMC
hybrid PID penggunaan parameter yang sama
tidak mampu mendapatkan nilai set point yang diinginkan. Namun dengan menggunakan nilai parameter yang berbeda simulasi SMC hybrid PID mampu memberikan nilai yang lebih cepat dibandingkan kedua pengendali PID dan SMC tersebut.
Pengujian terhadap pengendali SMC
hybrid PID kemudian menggunakan nilai parameter yang berbeda, dimana untuk nilai parameter Kp= 3, Ki= 0.1, Kd= 0.1, dan parameter K=320 dan =0,05. Hasilnya adalah respon transien pengendali SMC hybrid PID lebih cepat dibandingkan dengan kedua pengendali tersebut, yaitu untuk beban nominal, nilai delay time (td)=0,04 detik ,rise time (tr)=0.071 detik peak time (tp)= 0,102 detik dan settling time (ts)= 0,2 detik. Sedangkan nilai respon transien pengendali PID untuk beban nominal memiliki nilai delay
time (td) = 0,05 detik, rise time (tr) = 0,159 detik, peak time (tp) = 0.352 detik, dan settling time (ts) = 1,09 detik, dan untuk pengendali SMC memiliki nilai delay time (td) = 0,149 detik, rise time (tr) =
0,2615 detik, peak time (tp) = 0,33 detik, settling
time (ts) = 0,326 detik.
Kesimpulan
Berdasarkan analisa dan pembahasan
yang
telah dilakukan pada bab sebelumnya maka diperoleh kesimpulan sebagai berikut
1. Simulasi ini dilakukan dengan parameter yang sama untuk simulasi PID, SMC maupun hybrid. Nilai parameter PID digunakan nilai Kp= 10000, Ki= 0.1, Kd= 0.1 sedangkan SMC digunakan konstanta K=80 dan =0,15. Untuknilaidelay time (td) dan rise time (tr), pengendali PID memiliki respon yang lebih cepat dibandingkan pengendali SMC. Namun untuk nilai peak time (tp), settling time (ts) pengendali SMC memiliki nilai respon transien yang lebih cepat.
2. Pengujian terhadap pengendali SMC
hybrid PID kemudian menggunakan nilai
parameter yang berbeda, dimana untuk nilai parameter Kp= 3, Ki= 0.1, Kd= 0.1, dan parameter K=320 dan =0,05. Hasilnya adalah respon transien pengendali SMC hybrid PID lebih cepat dibandingkan dengan kedua pengendali tersebut, untuk beban nominal, nilai
delay time (td)=0,04 detik ,rise time (tr)=0.071 detik peak time (tp)= 0,102 detik dan settling time (ts)= 0,2 detik. Sedangkan nilai respon transien pengendali PID untuk beban nominal memiliki nilai delay time (td) = 0,05 detik, rise time (tr) = 0,159 detik, peak time (tp) = 0.352 detik, dan settling time (ts) = 1,09 detik, dan untuk pengendali SMC memiliki nilai delay time (td) = 0,149 detik, rise time (tr) = 0,2615 detik, peak time (tp) = 0,33 detik, settling time (ts) = 0,326 detik.
PID
Beban Nominal Beban
minimal
Beban maksimal td 0,05 detik 0,045 detik 0,05 detik
tr 0,159 detik 0,139 detik 0,172 detik
tp 0,352 detik 0,138 detik 0,43 detik
ts 1,09 detik 0,886 detik 1,284 detik
ess 0,183 % 0.152 % 0,204% SMC hybrid PID Beban Nominal Beban minimal Beban maksimal td 0,04 detik 0,035 detik 0,04 detik tr 0.071 detik 0,062 detik 0.070 detik tp 0,102 detik 0.089 detik 0,11 detik ts 0,2 detik 0.2 detik 1,18 detik ess 0.01% 0.05 % 0 %
Daftar Pustaka
[1] Arif,Shaumi dan Pramudijanto, Josaphat. “Desain dan Implementasi Kontroler
Fuzzy-Supervised PID berbasis PLC
pada Sistem Kontrol Level Cairan
Coupled-Tank”. Skripsi Jurusan Teknik
Elektro. ITS,Surabaya. 2013.
[2] Enginering & Scientific Laboratory Instruments. “Study Equipment Process
Control System”.
http://www.esli.com.dz/doc/Products/02/ controle/index.htm. [Diakses tanggal 10 April 2015].
[3] Huda, Miftahul. “Protokol komunikasi
modbus RTU pada sistem otomasi
industri”. Tenaga Professional LPP kampus industri. 2010
[4] Krisnan, R. “Electric Motor Drives
Modeling, Analysis, And Control”.
Pretice Hall.2001
[5] Melvin, Jesse. “Perancangan dan implementasi pengendali Model
Predictive Control dengan Constraine
untuk pengaturan Level pada Coupled-Tank Basic Process Rig 38-100”. Jurusan Teknik Elektro. Universitas Indonesia.(2008)
[6] Nur Qomarudin, Mochamad. “Kontroler
Fuzzy-PI untuk Plant Coupled-Tank”.
Skripsi Jurusan Teknik Elektro. ITS,Surabaya. 2013.
[7] Rahmad Fua’ad, Mohammad dan Rozali MD, Sahazati. “ Modling and Controlling Design Level Sistem: Analysis & Comparison”. Jurnal Teknologi. Universitas Teknologi Malaysia.2013.
[8] Sadli, Muhammad. “ Desain Kontroler PI dengan Decoupling pada Sistem Kendali
Level Coupled Tank”. Jurusan Teknik
Elektro, Universitas Malikussaleh, Lhokseumawe.2014
[9] Slotine, Jean-Jacquest E. “Applied Nonlinier Control”.1991
[10] Sugianto Okky. “Perancangan dan Implementasi Kontroler Sliding Mode untuk Pengaturan Level pada Coupled
Tank”. Skripsi Jurusan Teknik Elektro,
ITS, Surabaya. 2012.
[11] W. L. Slotine . “Applied Nonlinear Control”.Prentice Hall.1991.