Fakultas Ilmu Komputer
Universitas Brawijaya
1989
Object Following Robot berbasis Pembacaan Jarak menggunakan Metode
PID Controller
Dyas Restu Palupi1, Dahnial Syauqy2, Agung Setia Budi3
Program Studi Teknik Komputer, Fakultas Ilmu Komputer, Universitas Brawijaya Email: 1[email protected], 2[email protected], 3[email protected]
Abstrak
Sebagian besar aktivitas manusia dilakukan dengan menggunakan tangan. Aktivitas-aktivitas tersebut dapat dilakukan dengan lancar jika barang-barang yang kita bawa cukup dalam kapasitas tangan kita, baik secara jumlah maupun beratnya. Namun apabila barang yang kita bawa terlalu banyak atau besar maka aktivitas tersebut akan sulit. Untuk menyelesaikan masalah ini, diperlukan sebuah alat yang mampu mempermudah aktivitas tersebut. Pada penelitian ini dirancang sebuah robot yang dapat mengikuti manusia atau object following robot. Dengan robot ini, manusia dapat membawa barang secara hands-free. Prinsip kerjanya adalah mendeteksi object yang berada di depannya dengan menggunakan sensor jarak dan menjaga jarak robot dengan object tersebut menggunkan PID controller. Sensor jarak yang digunakan adalah 3 buah sensor ultrasonik HC-SR04. Sensor-sensor ini diletakkan di depan, depan kanan, dan depan kiri robot. Data dari sensor diolah menggunakan PID controller yang ditanam pada arduino uno. Output yang dihasilkan dari PID controller adalah PWM yang akan terhubung ke motor DC. Sedangkan untuk menentukan arah gerakan robot digunakan seleksi kondisi dari tiga sensor. Berdasarkan hasil pengujian, robot dapat menjaga jarak dengan object dan mengikuti pergerakan object. Settling time (ts) dari robot ini dengan set point 35 cm adalah sekitar 1 second. Hal ini menunjukkan bahwa robot dapat bekerja dengan response time yang relatif cepat.
Kata kunci: Robot, object following robot, sensor ultrasonik HC-SR04, PID controller, arduino uno
Abstract
Most human activities are carried out by hand. These activities can be well carried out if the items we carry are sufficient in the capacity of our hands, both in quantity and weight. But if the items we carry are too many or large, the activity will be difficult. To solve this problem, we need a system that is able to make these activities easier. In this research, a robot is designed to follow a human. This robot is called object following robot. Using this robot, humans can carry things hands-free. The working principle of the robot is to detect the object by using a proximity sensor and to keep the robot's distance from the object using the PID controller. The robot uses three ultrasonic sensors HC-SR04 as its proximity sensors. These sensors are placed in front, right front, and left front of the robot. Data from the sensor is processed using a PID controller embedded in arduino uno. The output generated from the PID controller is a PWM that will be connected to a DC motor. Meanwhile, to determine the direction of movement of the robot used condition selection from three sensors. Based on the test results, the robot can keep a distance from the object and follow the movement of the object. The settling time (ts) of this robot with a set point of 35 cm is about 1 second. The test result shows that the robot works well, with a relatively fast response time.
Keywords: Robot, object following robot, ultrasonic sensor HC-SR04, PID controller, arduino uno
1. PENDAHULUAN
Dalam kehidupan sehari-hari manusia tidak lepas dari berbagai macam aktivitas. Mulai dari aktivitas yang sederhana sampai dengan aktivitas yang kompleks. Sebagian besar
aktivitas ini dilakukan dengan menggunakan tangan. Contoh dari aktivitas-aktivitas tersebut adalah membawa barang, menarik koper, mendorong kereta bayi, dan lain-lain. Kegiatan-kegiatan ini dapat dilakukan dengan lancar jika barang-barang yang kita bawa cukup dalam
kapasitas tangan kita, baik secara jumlah maupun beratnya. Namun jika barang-barang tersebut berukuran besar dan memiliki massa yang cukup berat maka kita akan sulit membawanya. Ini adalah salah satu masalah yang sederhana namun jarang diperhatikan. Lebih jauh lagi, kegiatan ini akan semakin memakan tenaga jika jarak yang harus ditempuh ketika membawa barang-barang tersebut cukup jauh. Aktivitas ini juga akan sulit dilakukan oleh penyandang disabilitas.
Di sisi lain, teknologi di era modern ini selalu berkembang seiring dengan berjalannya waktu. Perkembangan teknologi yang pesat ini membawa banyak perubahan terhadap kehidupan sehari-hari. Adanya teknologi dikarenakan untuk membantu memudahkan pekerjaan sehari-hari manusia. Perkembangan teknologi ini terjadi disemua bidang. Mulai dari bidang industri, transportasi, militer, hingga teknologi pada kehidupan sehari-hari. Begitu juga dengan perkembangan teknologi pada bidang robotic. Pada bidang robotic itu sendiri, saat ini sudah banyak penelitian yang dilakukan. Contohnya adalah robot beroda (Wheeled robots). Penelitian tentang robot beroda dengan fungsi khusus untuk mengikuti object (object following) juga telah dilakukan (Reza, 2015).
Perkembangan teknologi robot tersebut dapat menjadi salah satu solusi yang cukup baik untuk mengatasi permasalahan yang terjadi ketika kita membawa barang-barang yang melebihi kapasistas tangan kita. Dengan teknologi robot tersebut, barang-barang yang berada di luar kapasitas tangan bisa kita letakkan di atas robot yang bergerak mengikuti kita. Dalam hal ini dibutuhkan sebuah robot yang bisa mengikuti object. Sehingga dalam penelitian skripsi ini dilakukan perancangan dan pembuatan object following robot untuk menyelesaikan permasalahan di atas.
Untuk dapat mengikuti object, dari penelitian-penelitian sebelumnya ada beberapa parameter yang digunakan. Parameter yang pertama adalah keberadaan object. Parameter ini bisa dideteksi dengan menggunakan sensor infrared (IR) (Abri, 2018). Parameter yang kedua adalah jarak object dengan robot. Parameter ini bisa dideteksi dengan sensor ultrasonik (Reza, 2015 dan Arbayu, 2017). Parameter yang ketiga adalah kondisi visual object. Parameter ini bisa dideteksi dengan menggunakan kamera (Chandra, 2017). Pada penelitian skripsi ini, digunakan parameter jarak karena sensor ultrasonik mudah dijumpai di
pasaran dengan harga terjangkau dan komputasi yang tidak terlalu rumit untuk pengambilan data jika dibandingkan dengan kamera. Sensor ultrasonik juga memiliki keakuratan yang lebih tinggi dibandingkan dengan sensor IR.
Selain penggunaan parameter yang sesuai, object following robot juga harus menggunakan metode yang tepat. Karena jika metode yang digunakan tidak tepat maka bisa jadi respon robot terhadap object yang diikuti akan lambat. Selain itu, pergerakan robot tidak bisa smooth. Oleh karena itu, dalam penelitian ini digunakan metode PID (Proporsional, Integral, Derivative) controller untuk mengontrol sistem. PID adalah pengontrolan dengan unsur P, I dan D berupa model matematika dengan masukan Gain, Integral, Derivative. PID merupakan pengontrolan konvensional, yang merupakan bentuk matematis yang sangat baik karena dapat mengubah error menjadi nol (Nasrul, et al., 2018). PID controller memiliki berbagai kelebihan, seperti mudah digabungkan dengan metode lainnya. Metode ini juga memiliki proses komputasi yang relatif ringan sehingga diimplementasikan pada hardware dengan resource terbatas .
Penggunaan PID controller pada object following robot memungkinkan robot untuk memiliki respon yang cepat dan tingkat akurasi yang tinggi. Tingkat komputasi yang ringan pada PID controller juga memungkinkan pengembangan robot di berbagai platform. Dengan kondisi tersebut, maka penelitian ini diharapkan untuk dapat menyelesaikan permasalahan yang telah disebutkan dan membantu peneliti lainnya dalam pengembangan selanjutnya.
2. OBJECT FOLLOWING ROBOT
Pada penelitian ini, perancangan object following robot didasarkan pada tiga bagian utama robot yaitu sensor, controller, dan aktuator. Sensor yang digunakan pada object following robot ini adalah sensor ultrasonik HC-SR04, controller yang digunakan adalah mikrokontroler arduino uno, dan aktuator yang digunakan adalah motor DC.
Robot ini menggunakan tiga buah sensor. Fungsi dari sensor ini adalah untuk mendeteksi dan mengetahui jarak object dari robot. Data jarak yang diperoleh dari sensor akan diolah oleh mikrokontroler untuk menentukan output pada motor. Proses pengolahan pada mikrokontroler menggunakan metode PID controller. Hasil
pengolahan dari PID controller berupa sinyal Pulse Width Modulation (PWM) yang akan menentukan cepat lambatnya pergerakan motor. Diagram blok dari object following robot ini ditunjukkan dalam Gambar 1.
Gambar 1. Diagram blok object following robot 2.1. Implementasi Perangkat Keras
Implementasi perangkat keras dilakukan dengan cara menghubungkan komponen-komponen sesuai dengan rangkaian ditunjukkan dalam Gambar 2 dan Gambar 3. Komponen-komponen tersebut meliputi modul sensor HC-SR04, mikrokontroler arduino uno, motor driver L298N, dan motor DC. Selain komponen-komponen tersebut, implementasi perangkat keras juga meliputi mekanik dari robot, yaitu badan robot dan roda.
Gambar 2. Diagram skematik sensor ultrasonik HC-SR04
Gambar 2 menunjukkan diagram skematik yang menghubungkan tiga buah sensor ultrasonik HC-SR04 dengan arduino uno. Sensor ultrasonik HC-SR04 memiliki empat buah pin. Dua di antaranya adalah Vcc dan ground. Dua pin ini terhubung dengan Vcc dan ground dari arduino uno. Dua pin lainnya adalah pin trigger dan pin echo. Pin trigger dari sensor kiri, sensor depan, dan sensor kanan secara berurutan
terhubung ke pin A5, A2, dan 13. Pin echo dari sensor kiri, sensor depan, dan sensor kanan secara berurutan terhubung ke pin A4, A3, dan 12.
Gambar 3. Diagram skematik motor DC Gambar 3. Diagram skematik motor DC menunjukkan diagram skematik yang menghubungkan motor DC, driver, dan arduino. Motor DC kiri dan kanan terhubung ke pin out 1-4 driver. Pin IN1 dan IN2 dari driver yang mengatur pergerakan motor kanan terhubung ke pin 6 dan 5 dari arduino. Pin IN3 dan IN4 dari driver yang mengatur pergerakan motor kiri terhubung ke pin 10 dan 9 dari arduino. Pin ENA dan pin ENB dari driver yang mengatur kecepatan motor kanan dan motor kiri terhubung ke pin 3 dan 11 dari arduino uno.
(a) (b)
(c) (d)
Gambar 4. Implementasi perangkat keras (a) Tampak robot bagian depan (b) Tampak robot bagian (c) Tampak robot bagian kiri (d) Tampak
robot bagian kanan
Gambar 4. Implementasi perangkat keras menunjukkan hasil implementasi perangkat keras secara keseluruhan dari sisi komponen
elektronik dan juga mekanik.
2.2 Implementasi Perangkat Lunak
Implementasi perangkat lunak mengacu kepada flow chart yang ditunjukkan dalam Gambar 5 Flow chart perangkat lunak object following robot. Dalam flow chart tersebut terdapat lima proses utama yaitu distance acquisition, data normalization, low pass filter, compute PID, decision making.
Gambar 5. Flow chart perangkat lunak object following robot
Distance acquisition berisikan proses mengakuisisi data dengan menghitung nilai jarak yang didapatkan dari hasil pengambilan data menggunakan sensor ultrasonik HC-SR04.
Data Normalization berfungsi untuk membatasi nilai error agar nilai kumulatif error tidak terlalu besar sehingga dapat membuat respon sistem menjadi lebih lambat. Pembatasan nilai error dilakukan dengan cara memberikan nilai maksimum dan minimum pada error. Maksud dari pemberian nilai maksimum dan minimum ini adalah jika nilai error-nya lebih besar dari nilai maksimum atau nilai threshold, maka nilai error yang digunakan adalah nilai threshold tersebut. Begitu juga dengan nilai minimum, jika jaraknya kurang dari nilai minimum atau minus threshold maka nilai error yang dipakai adalah nilai minus threshold. Sebagai contohnya, jika jarak yang dibaca dari sensor depan adalah 80 cm, sedangkan nilai threshold yang ditentukan adalah 70 cm, maka
jarak dari sensor depan yang digunakan dalam perhitungan adalah 70 cm.
Low pass filter berfungsi untuk menghilangkan noise pada sistem. Noise pada sistem biasanya berupa pembacaan sensor yang tidak sesuai dengan kondisi sebenarnya dan menghasilkan nilai yang tinggi/rendah secara tiba-tiba. Jika dilihat dari sisi frekuensi maka data seperti ini masuk ke dalam kategori frekuensi tinggi. Oleh sebab itu maka digunakan low pass filter. Penjelasan tentang low pass filter ini dibahas dalam subbab Low Pass Filter.
Compute PID berfungsi untuk
mendapatkan hasil perhitungan besarnya PWM yang dihitung menggunakan metode PID controller. Metode PID controller ini berfungsi untuk membuat robot berada pada jarak konstan yang sesuai dengan set point yang sudah ditentukan sebelumnya.
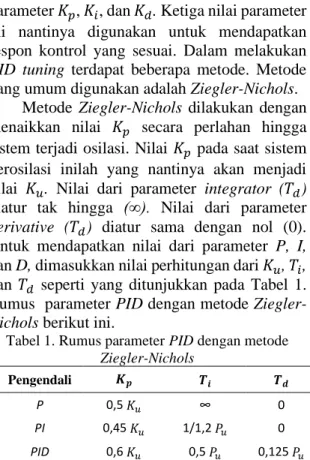
Untuk menentukan nilai parameter yang ada di PID controller perlu dilakukan PID tuning. PID tuning merupakan suatu teknik penyesuaian (tuning) untuk mendapatkan nilai parameter 𝐾𝑝, 𝐾𝑖, dan 𝐾𝑑. Ketiga nilai parameter ini nantinya digunakan untuk mendapatkan respon kontrol yang sesuai. Dalam melakukan PID tuning terdapat beberapa metode. Metode yang umum digunakan adalah Ziegler-Nichols.
Metode Ziegler-Nichols dilakukan dengan menaikkan nilai 𝐾𝑝 secara perlahan hingga sistem terjadi osilasi. Nilai 𝐾𝑝 pada saat sistem berosilasi inilah yang nantinya akan menjadi nilai 𝐾𝑢. Nilai dari parameter integrator (𝑇𝑑) diatur tak hingga (∞). Nilai dari parameter derivative (𝑇𝑑) diatur sama dengan nol (0). Untuk mendapatkan nilai dari parameter P, I, dan D, dimasukkan nilai perhitungan dari 𝐾𝑢, 𝑇𝑖, dan 𝑇𝑑 seperti yang ditunjukkan pada Tabel 1. Rumus parameter PID dengan metode Ziegler-Nichols berikut ini.
Tabel 1. Rumus parameter PID dengan metode Ziegler-Nichols Pengendali 𝑲𝒑 𝑻𝒊 𝑻𝒅 P 0,5 𝐾𝑢 ∞ 0 PI 0,45 𝐾𝑢 1/1,2 𝑃𝑢 0 PID 0,6 𝐾𝑢 0,5 𝑃𝑢 0,125 𝑃𝑢 Sumber: Ogata, 2002 3. PENGUJIAN DAN ANALISIS
Pengujian dilakukan untuk mengetahui kinerja dari alat yang dibuat. Pengujian ini terdiri dari pengujian pembacaan sensor jarak, pengujian respon pergerakan motor, pengujian
PID controller, dan pengujian fungsional. 3.1. Pengujian Pembacaan Sensor Jarak
Pengujian pembacaan sensor jarak bertujuan untuk mengetahui akurasi sensor jarak yang digunakan. Pengujian dilakukan dengan cara membandingkan hasil pembacaan sensor dengan jarak sebenarnya. Hasil dari pengujian ini ditunjukkan dalam Tabel 2. Berdasarkan Tabel 2 dapat diketahui bahwa rata-rata nilai error pada sensor kanan sebesar 0,30 cm. Rata-rata nilai error pada sensor depan sebesar 0,24 cm. Rata-rata nilai error pada sensor kiri sebesar 0,52 cm.
Tabel 2. Hasil pengujian sensor jarak
No. Actual Distance (cm) Right Sensor (cm) Front Sensor (cm) Left Sensor (cm) 1. 5 5,38 4,90 5,00 2. 10 10,50 10,38 10,79 3. 15 15,19 15,02 15,88 4. 20 19,29 20,12 20,79 5. 30 30,07 29,93 30,79 6. 40 40,10 40,16 40,60 7. 50 49,72 50,03 50,71 8. 60 59,67 59,78 59,93 9. 70 69,76 69,52 70,17 10. 80 80,28 80,50 80,03 11. 90 90,03 90,28 88,50 12. 100 99,55 100,59 100,02 Rata-rata error 0,30 0,24 0,52
3.2. Pengujian Respon Pergerakan Motor Pengujian respon pergerakan motor bertujuan untuk memastikan bahwa arah putaran motor sesuai dengan logika yang diberikan oleh controller. Pengujian ini dilakukan dengan cara memberikan logika pada motor driver dan melihat keluarannya apakah sudah sesuai dengan teori. Hasil dari pengujian ditunjukkan dalam Tabel 3.
Tabel 3. Hasil pengujian respon motor
No. Variabel Low/High Output
1. IN1 Low Backward
2. IN2 High 3. IN3 High 4. IN4 Low 5. IN1 Low Turn Right 6. IN2 High 7. IN3 Low 8. IN4 High 9. IN1 High Turn Left 10. IN2 Low 11. IN3 High 12. IN4 Low 13. IN1 High Forward 14. IN2 Low 15. IN3 Low 16. IN4 High 17. IN1 Low Stop 18. IN2 Low 19. IN3 Low 20. IN4 Low
3.3. Pengujian PID Controller
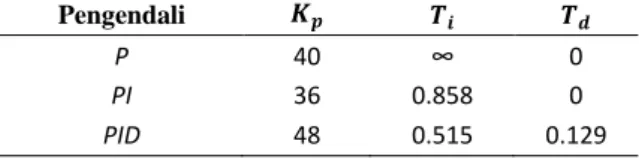
Pengujian PID controller bertujuan untuk mengetahui kinerja dari PID controller yang digunakan dalam penelitian. Pengujian dilakukan dengan cara melakukan PID tuning terlebih dahulu menggunakan metode Ziegler-Nichols. Hasil dari PID tuning ditunjukkan dalam Tabel 4.
Tabel 4. PID tuning dengan metode Ziegler-Nichols
Pengendali 𝑲𝒑 𝑻𝒊 𝑻𝒅
P 40 ∞ 0
PI 36 0.858 0
PID 48 0.515 0.129
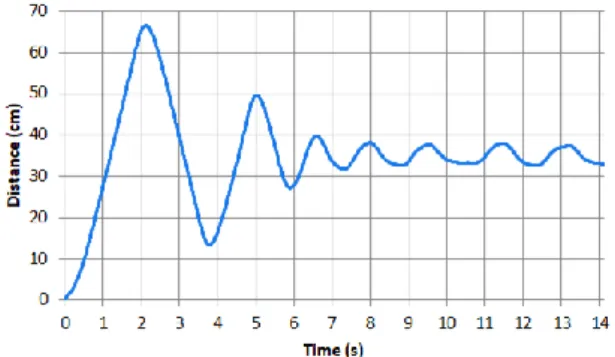
Berdasarkan hasil dari PID tuning dengan menggunakan metode Ziegler-Nichols, didapatkan nilai 𝐾𝑝 = 48, 𝑇𝑖 = 0.515, dan 𝑇𝑑 = 0.129. Nilai parameter ini kemudian digunakan untuk melakukan pengujian PID controller. Hasil dari pengujian PID controller ditunjukkan dalam Gambar 6.
Gambar 6. Grafik pengujian PID controller dengan metode Ziegler-Nichols
Berdasarkan pada grafik yang ditunjukkan dalam Gambar 6 dapat diketahui bahwa robot masih mengalami osilasi. Kondisi ini masih belum sesuai dengan kebutuhan sistem seperti yang tertulis pada analisis kebutuhan sistem. Oleh karena itu, perlu dilakukan proses PID tuning kembali untuk mendapatkan nilai 𝐾𝑝, 𝐾𝑖, dan 𝐾𝑑 yang hasil responnya sesuai dengan set point dan tidak mengalami osilasi. Proses PID tuning kali ini dilakukan dengan menggunakan metode Trial and Error. Dari penggunaan metode Trial and Error, didapatkan nilai 𝐾𝑝 = 35, 𝐾𝑖 = 0.95, dan 𝐾𝑑 = 10.8. Hasil pengujian PID controller dengan menggunakan parameter tersebut ditunjukkan dalam Gambar 7. Berdasarkan Gambar 7, dapat diketahui bahwa settling time (ts) dari sistem ini adalah sekitar 1 second.
Gambar 7. Grafik pengujian PID controller dengan metode Trial and Error
3.4. Pengujian Fungsional
Pengujian ini dilakukan untuk mengetahui fungsionalitas robot secara keseluruhan. Fungsionalitas ini meliputi kemampuan robot untuk mengikuti object di depannya. Baik itu object yang bergerak lurus maupun berbelok. Pengujian ini dilakukan dengan cara menggerakkan object di depan robot dan melihat pergerakan robot apakah bisa mengikuti object tersebut atau tidak. Hasil pengujian ini ditunjukkan dalam Tabel 5.
Tabel 5. Hasil pengujian fungsional
No . Arah Gerak Object Kecepatan Object (m/s) Hasil 1 Maju 0.125 Berhasil 2 Maju 0.250 Berhasil 3 Maju 0.545 Tidak Berhasil
4 Belok Kanan 0.127 Berhasil
5 Belok Kanan 0.181 Berhasil
6 Belok Kanan 0.461 Tidak
Berhasil
7 Belok Kiri 0.142 Berhasil
8 Belok Kiri 0.193 Berhasil
9 Belok Kiri 0.500 Tidak
Berhasil
10 Mundur 0.146 Berhasil
11 Mundur 0.285 Berhasil
12 Mundur 0.545 Tidak
Berhasil
Berdasarkan data pada Tabel 5, robot berhasil mengikuti object dengan kecepatan maksimal sekitar 0.285 m/s. Pada saat object maju dengan kecepatan 0.545 m/s robot sudah tidak bisa mengikuti object. Hal ini dikarenakan object bergerak terlalu cepat. Hal yang sama terjadi ketika object bergerak belok kanan, belok kiri dan mundur dengan kecepatan sekitar 0.5 m/s, robot sudah tidak bisa mengikuti object. 4. KESIMPULAN
Kesimpulan yang didapat berdasarkan hasil penelitian yang telah dilakukan diantaranya yaitu robot dapat melakukan akuisisi data jarak dengan baik dengan rata-rata error dari ketiga sensor adalah 0.353 cm.
Penggunaan metode Ziegler-Nichols pada robot masih menghasilkan respon yang berosilasi, sehingga digunakan metode Trial and Error. Penggunaan metode Trial and Error menghasilkan respon yang sesuai dengan set point.
Berdasarkan hasil pengujian, robot secara fungsional bisa mengikuti object yang bergerak maju, belok kanan, belok kiri, dan mundur dengan kecepatan maksimal pengujian adalah 0.285 m/s.
Perancangan robot dalam skripsi ini menggunakan modul-modul terpisah yang tersedia di pasaran dengan harga yang relatif terjangkau. Modul-modul tersebut kemudian dirakit menjadi satu. Kondisi modul dan proses perakitan yang kurang sempurna menyebabkan kondisi mekanik robot kurang rapih. Kondisi ini berpengaruh terhadap pergerakan robot. Untuk mengatasi permasalahan ini, maka untuk penelitian selanjutnya disarankan melakukan perancangan mekanik dan penggunaan modul
yang lebih rapih. Selain itu, untuk meningkatkan kecepatan respon sistem diperlukan mikrokontroller dengan clock yang lebih tinggi, dan untuk meningkatkan reliabilitas robot perlu digunakan motor DC yang lebih bagus.
5. DAFTAR PUSTAKA
Abri, Kristiyanti I., dkk. 2018. Object Following using Fuzzy Controller for Assistive Robot.
Arsada, Bakhtiyar, dan Suprianto, Bambang. 2017. Aplikasi Sensor Ultrasonik Untuk Deteksi Posisi Jarak Pada Ruang Menggunakan Arduino Uno
Nasrul, Z. A., dkk. 2018. Aplikasi Kontrol PID Pada Reaktor Pabrik Asam Formiat Dengan Kapasitas 100.000 Ton/Tahun. Ogata, K. 2002. Modern Control Engineering,
Fourth Edition.
Sekar, Chandra P., dan Kala, Rahul . 2017. Vision-Based Robot Following Using PID Control.
Wardhana, Lingga. 2006. “Belajar Sendiri Mikrokontroler AVR Seri ATmega8535 Simulasi, Hardware, dan Aplikasi”. Yogyakarta: Andi Offset.
Wicaksono, Handy, dan Pramudjianto, Josaphat. 2004. Kontrol PID untuk Pengaturan Kecepatan Motor DC Dengan Metode Tuning Direct Synthesis.