BAB III
PERANCANGAN SISTEM
Pada bab ini akan dibahas mengenai perancangan sistem yang meliputi perangkat keras yang terdiri dari sistem mekanik dan sistem elektronik, serta perangkat lunak.
3.1. Perangkat Keras
Pada bagian ini akan dijelaskan mengenai proses perancangan perangkat keras alat yang terdiri dari sistem mekanik dan sistem elektronik mesin.
3.1.1. Sistem Mekanik
Sistem mekanik pada mesin capping ini terbagi menjadi 4 modul yang terdiri dari conveyor, starwheel, alat crimping dan capping head. Berikut merupakan cara kerja masing-masing sistem.
3.1.1.1. Sistem Conveyor
Prinsip kerja conveyor adalah mengangkut material berupa unit load yang ada di atas belt. Secara keseluruhan rangka conveyor menggunakan besi dengan realisasi ukuran 100cm x15cm x80cm (panjang x lebar x tinggi).
Keterangan :
Pada sistem ini, conveyor difungsikan sebagai jalur penggerak botol dengan tutup polos tanpa ulir yang akan bergerak menuju starwheel (f). Menggunakan motor AC sebagai penggerak utama conveyor. motor AC (c.1) akan dihubungkan ke head pulley (c.3), sehingga head pulley (c.3) dapat menggerakkan belt conveyor (c.2). Guide bar (c.4) yang menempel pada rangka conveyor (c.5) bertujuan untuk menjaga keseimbangan botol yang sedang berjalan dan dapat disesuaikan menurut ukuran botol.
Gambar 3.2. Motor AC conveyor Tabel 3.1. Spesifikasi motor conveyor
Gambar 3.3. Realisasi conveyor
3.1.1.2. Sistem Starwheel
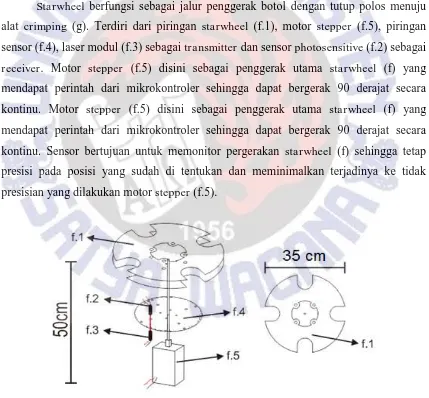
Starwheel berfungsi sebagai jalur penggerak botol dengan tutup polos menuju alat crimping (g). Terdiri dari piringan starwheel (f.1), motor stepper (f.5), piringan sensor (f.4), laser modul (f.3) sebagai transmitter dan sensor photosensitive (f.2) sebagai receiver. Motor stepper (f.5) disini sebagai penggerak utama starwheel (f) yang mendapat perintah dari mikrokontroler sehingga dapat bergerak 90 derajat secara kontinu. Motor stepper (f.5) disini sebagai penggerak utama starwheel (f) yang mendapat perintah dari mikrokontroler sehingga dapat bergerak 90 derajat secara kontinu. Sensor bertujuan untuk memonitor pergerakan starwheel (f) sehingga tetap presisi pada posisi yang sudah di tentukan dan meminimalkan terjadinya ke tidak presisian yang dilakukan motor stepper (f.5).
Keterangan :
f.1 : piringan starwheel. f.2 : sensor photosensitive. f.3 : laser modul.
f.4 : piringan sensor. f.5 : motor stepper.
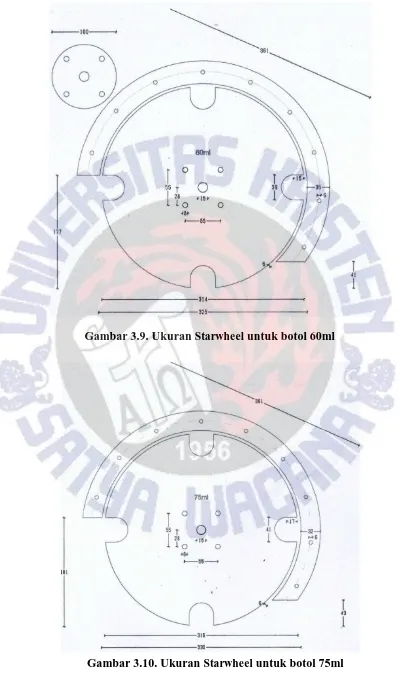
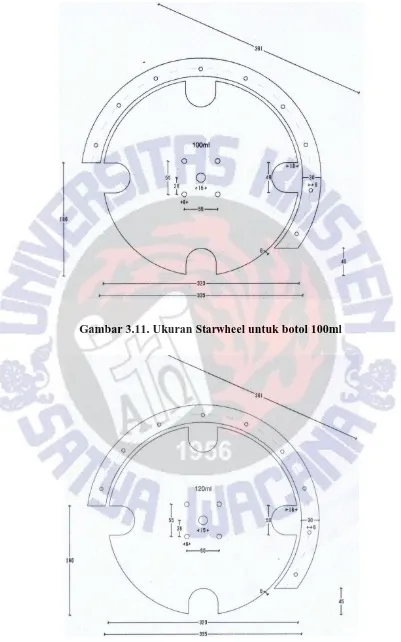
Pada starwheel memiliki 4 ukuran yang berbeda yaitu untuk ukuran botol 60ml, 75ml, 100ml, 120ml. Bahan starwheel menggunakan acrylic dengan ketebalan 12mm dengan diameter 350mm.
Gambar 3.5. Starwheel 60ml
Gambar 3.7. starwheel 100ml
Gambar 3.9. Ukuran Starwheel untuk botol 60ml
Gambar 3.11. Ukuran Starwheel untuk botol 100ml
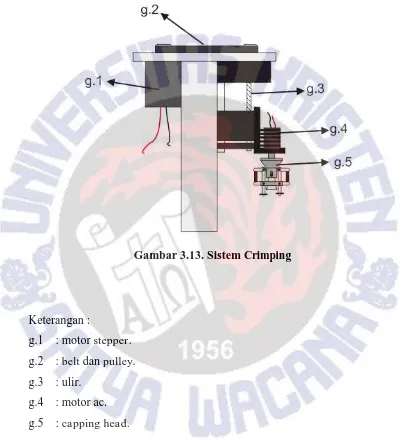
3.1.1.3. Sistem Crimping
Rangka pada sistem crimping menggunakan aluminium dengan ketebalan bahan 250mm, dengan dimensi 30cm x 26cm x 70cm (panjang x lebar x tinggi).
Gambar 3.13. Sistem Crimping
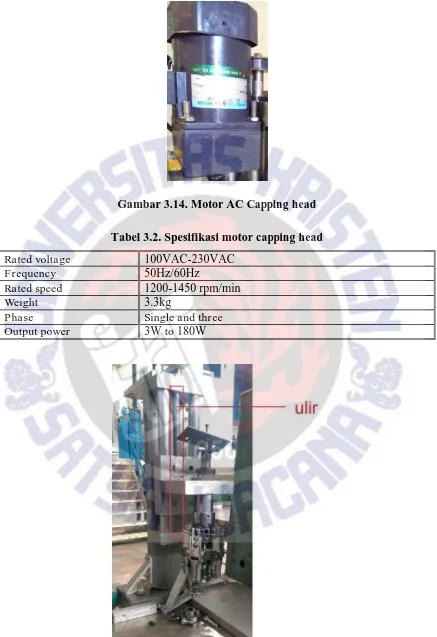
Gambar 3.14. Motor AC Capping head Tabel 3.2. Spesifikasi motor capping head
Rated voltage 100VAC-230VAC
Frequency 50Hz/60Hz
Rated speed 1200-1450 rpm/min
Weight 3.3kg
Phase Single and three
Output power 3W to 180W
Gambar 3.16. Realisasi motor stepper dan pulley pada sistem crimping
Gambar 3.17. Realisasi capping head dan motor AC sistem crimping 3.1.1.4. Capping head
Gambar 3.18. Capping head dan membentuk ulir pada tutup botol dengan bantuan pisau pembentuk ulir (g.5.5). Saat dudukan tutup botol (g.5.6) dan lengan mekanis (g.5.4) naik karena adanya tekanan, lengan mekanis (g.5.4) akan bergerak naik mengikuti sudut dari capping base (g.5.2), maka per pegas (g.5.1) akan tertekan dan mendorong masuk pisau pembentuk ulir (g.5.6) sehingga membentuk ulir pada tutup botol.
Gambar 3.20. Botol sebelum dan sesudah proses capping 3.1.2. Sistem Elektronik
Sistem elektronik pada mesin capping terdiri dari sistem kontrol mesin yang terdiri dari mikrokontroller, sensor, motor stepper dan driver, serta userinterface.
3.1.2.1. Mikrokontroler
berlangsung secara kontinu hingga user mematikan alat. Berikut konfigurasi penggunaan pin Arduino Mega 2560.
Gambar 3.21. Board Arduino MEGA 2560
Gambar diatas merupakan skema wiring diagram sistem elektronik dari mesin capping yang dikontrol melalui Arduino mega 2560. Berikut konfigurasi pin pada Arduino mega 2560.
Tabel 3.3 Tabel konfigurasi pin arduino
Pin Fungsi
Pin 9 Enable (mengirim data pada pin data ketika diberikan sinyal dari tinggi ke rendah)
Pin 10 Kontrol intensitas background LCD
Pin 11 Mengatur pulsa sebanyak 5048x (starwheel 90 derajat) Pin 13 Mengatur pulsa motor crimping
Pin 24 Pulsa ccw+ motor crimping Pin 25 Pulsa ccw+ motor starwheel Pin 28 Input sensor photosensitive 1 Pin 30 Input sensor photosensitive 2 Pin 32 Input limit switch
3.1.2.2. Sensor
Gambar 3.23. Peletakan motor dan sensor Keterangan:
A = conveyor
B = bodi mesin crimping C = starwheel
D = sensor photosensitive E = laser
F = piringan sensor G = motor stepper
Gambar 3.25. Wiring sensor
Tabel 3.4 Tabel konfigurasi pin arduino pada sensor
Pin Fungsi
Pin 28 Input sensor photosensitive 1 Pin 30 Input sensor photosensitive 2
3.1.2.2 .1. Sensor Photosensitive
Sensor photosensitive merupakan sensor yang sensitif dengan intensitas cahaya lingkungan dan digunakan untuk mendeteksi kecerahan ambien dan intensitas cahaya lingkungan. Tanpa adanya intensitas cahaya maka tidak akan mencapai ambang nilai yang dihasilkan untuk output tingkat rendah (low) tetapi, ketika intensitas cahaya lingkungan eksternal melebihi ambang set tertentu akan menghasilkan output tingkat tinggi (high). Output sensor photosensitive akan terhubung dengan mikrokontroler, kemudian mikrokontroler mendeteksi tingkat cahaya[2].
Sensor photosensitive sebagai receiver yang berfungsi menangkap cahaya dari laser (active high). Sensor photosensitive akan mengirim data menuju mikrokontroler yang bertujuan sebagai pengkoreksi posisi awal starwheel.
3.1.2.2.2. Laser
Laser sebagai transmitter akan menghasilkan cahaya yang akan diterima oleh receiver yaitu sensor photosensitive.
Gambar 3.27. Laser
3.1.2.3. Motor Stepper dan Driver
Motor stepper digunakan untuk mencapai posisi yang tepat melalui kontrol digital. Motor stepper akan mendapat pulsa yang diberikan oleh mikrokontroler melalui driver motor stepper.
Secara struktural motor stepper 5 fasa memiliki 10 kutub stator, 2 kutub stator per fasa nya, jarak antar gigi tiap stator adalah 0.72o. Dari konstruksi motor stepper 5 fasa tersebut diketahui bahwa basic angle step sebesar 0.72o. Dari datasheet motor stepper yang digunakan, motor stepper memiliki basic angle step sebesar0.072o, hal ini dikarenakan perbandingan torsi gearbox motor stepper yang digunakan sebesar 1:10, maka di dapat basic angle step akhir sebesar (0.72°)/10 = 0.072o.
Sudut rotasi dari motor stepper dikontrol menggunakan sinyal pulsa dari mikrokontroler arduino mega. Arduino mega akan memberi sinyal pulsa menuju driver motor stepper.
Gambar 3.29. Alur sistem motor stepper
Gerak rotasi motor stepper dipengaruhi oleh banyaknya jumlah pulsa yang diberikan kepada driver motor. Berdasarkan spesifikasi driver motor yang diperoleh maka pulsa yang dapat diterima oleh driver motor sebagai berikut:
Tabel 3.5 Tabel spesifikasi driver motor Lebar pulsa
Minimal 0.1 us Interval pulsa
Rising /falling time Maksimal 1us
Tegangan input pulsa [H] 4-8VDC [L] 0-0.5VDC Frekuensi maksimal input pulsa Maksimal 500KHz (Duty 50%)
Untuk menentukan besar rotasi sudut pada motor stepper diperoleh persamaan sebagai berikut:
sudut yang diinginkan = jumlah pulsa x ( � � )
resolusi dari ��
90° x 1
0.072° = jumlah pulsa
1250 = jumlah pulsa
Maka jumlah pulsa yang diperoleh sebesar 1250 pulsa untuk menggerakkan motor sejauh 90 derajat.
Gambar 3.30. Pulsa step rotasi motor
Tabel 3.6 Tabel konfigurasi pin arduino pada driver motor
Pin Fungsi
Pin 11 Mengatur pulsa sebanyak 5048x (starwheel 90 derajat) Pin 13 Mengatur pulsa motor crimping
Pin 24 Pulsa ccw+ motor crimping Pin 25 Pulsa ccw+ motor starwheel
3.1.2.4. User interface
User interface pada mesin capping menggunakan LCD 2x16 sebagai penampil menu dan 6 buah keypad untuk memilih menu yang tertampil pada LCD. Pada user interface terdapat tombol up, down, left, right, dan select. Tombol tersebut menggunakan satu jalur ADC. Nilai dari tiap tombol dibaca oleh mikrokontroler melalui pembagi tegangan 5 tahap. Tombol ON/OFF digunakan untuk mematikan dan menyalakan mesin.
Gambar 3.33. Realisasi User Interface
Tabel 3.7 Tabel konfigurasi pin LCD Shield
Pin 9 Enable (mengirim data pada pin data ketika diberikan sinyal dari tinggi ke rendah)
Pin 10 Kontrol intensitas background LCD
Tombol select:
330Ω+ 620Ω+ 1kΩ+ 3k3Ω
2kΩ+ 330Ω+ 620Ω+ 1kΩ+ 3k3Ω x 5V = 3,62V
Gambar 3.35. Skema pembagi tegangan pada keypad 3.2. Perangkat Lunak
Perangkat lunak digunakan untuk mengendalikan sistem. Pada bagian ini akan dijelaskan mengenai cara kerja sistem dari diagram alir, serta penjelasan tentang tahapan–tahapan cara kerja sistem.
Penjelasan diagram alir cara kerja sistem sebagai berikut:
a) Sistem akan memulai inisialisasi kecepatan dengan setting kecepatan default yaitu kecepatan LOW.
b) Jika tidak ada input reset maka akan masuk ke menu ukuran botol dan kecepatan yang tertampil pada LCD.
c) Jika Ya pada pilih botol, akan masuk ke menu masing-masing ukuran botol 60 ml, 75ml, 100ml, 120ml.
d) Jika Ya pada 60ml, mikrokontrol memberi 2500 pulsa menuju driver motor, kemudian starwheel berputar cw 90o, capping head turun, capping head mengepres botol, capping head naik. Proses akan berjalan hingga user menekan reset.
e) Jika tidak pada 60ml, apakah 75ml? Jika Ya pada 75ml, mikrokontrol memberi pulsa sebanyak 2400 pulsa menuju driver motor, kemudian starwheel berputar cw 90o, capping head turun, capping head mengepres botol, capping head naik. Proses akan berjalan hingga user menekan reset.
f) Jika tidak pada 75ml, apakah 100ml? Jika Ya pada 100ml, mikrokontrol memberi pulsa sebanyak 2200 pulsa menuju driver motor, kemudian starwheel berputar cw 90o, cappinghead turun, cappinghead mengepres botol, cappinghead naik. Proses akan berjalan hingga user menekan reset.
g) Jika tidak pada 100ml, apakah 120ml? Jika Ya pada 120ml, mikrokontrol memberi pulsa sebanyak 1800 pulsa menuju driver motor, kemudian starwheel berputar cw 90o, cappinghead turun, cappinghead mengepres botol, cappinghead naik. Proses akan berjalan hingga user menekan reset. Jika tidak pada 120ml, kembali ke menu awal ukuran botol dan kecepatan.
h) Jika ya pada pilih kecepatan, apakah menekan tombol up? Jika ya menekan tombol up maka kecepatan=high dan akan kembali ke menu awal.
i) Jika tidak menekan tombol up, apakah menekan tombol down? Jika ya menekan tombol down maka kecepatan=low dan akan kembali ke menu awal.
j) Jika tidak menekan tombol down, apakah memilih kecepatan? Jika tidak akan kembali ke menu awal.