BAB II
TINJAUAN PUSTAKA
2.1 Umum
Motor induksi merupakan motor arus bolak-balik (AC) yang paling luas digunakan dan dapat dijumpai dalam setiap aplikasi industri maupun rumah tangga. Penamaannya berasal dari kenyataan bahwa arus rotor motor ini bukan diperoleh dari sumber tertentu, tetapi merupakan arus yang terinduksi sebagai akibat adanya perbedaan relatif antara putaran rotor dengan medan putar (rotating
magnetic field) yang dihasilkan arus stator [1].
Motor induksi memiliki konstruksi yang kuat, sederhana, handal, serta berbiaya murah. Di samping itu motor ini juga memiliki effisiensi yang tinggi saat keadaan normal dan tidak membutuhkan perawatan yang banyak. Namun, motor induksi memiliki kelemahan dalam hal pengaturan kecepatan. Dimana pada motor induksi pengaturan kecepatan tidak bisa dilakukan tanpa merubah efisensi.
2.2 Konstruksi Motor Induksi Tiga Fasa
Secara umum konstruksi motor induksi tiga fasa terdiri dari stator dan rotor. Stator merupakan bagian dari mesin yang tidak berputar dan terletak pada bagian luar. Sedangkan rotor merupakan bagian dari mesin yang berputar dan letaknya pada bagian dalam.
Motor induksi merupakan motor arus bolak – balik (ac) dimana arus rotor motor ini bukan diperoleh dari sumber tertentu, tetapi merupakan arus yang terinduksi sebagai akibat adanya perbedaan relatif antara putaran rotor dengan medan putar (rotating magnetic field) yang dihasilkan oleh stator [1].
Belitan stator yang dihubungkan dengan suatu sumber tegangan tiga fasa akan menghasilkan medan magnet yang berputar dengan kecepatan sinkron (
). Medan putar pada stator tersebut akan memotong konduktor –
konduktor pada rotor, sehingga terinduksi arus dan sesuai dengan hukum Lentz, rotor pun akan turut berputar mengikuti medan putar stator. Perbedaan putaran relatif antara stator dan rotor disebut slip. Bertambahnya beban akan memperbesar kopel motor yang oleh karenanya akan memperbesar pula arus induksi pada rotor, sehingga slip antara medan putar stator dan putaran rotor pun akan bertambah besar. Jadi, bila beban motor bertambah maka putaran rotor cenderung menurun. Dikenal dua tipe motor induksi (lihat gambar 2.1) yaitu motor induksi dengan rotor belitan dan motor induksi dengan rotor sangkar.
(a)Kumparan stator (b) Rotor belitan (c) Rotor sangkar Gambar 2.1 : Kontruksi motor induksi tiga phasa
2.3 Prinsip Kerja Medan Putar
Perputaran motor pada mesin arus bolak balik ditimbulkan oleh adanya medan putar (fluks yang berputar) yang dihasilkan dalam kumparan statornya. Medan putar ini terjadi apabila kumparan stator dihubungkan dalam fasa banyak, umumnya fasa 3. Hubungan dapat berupa hubungan bintang ataupun delta.
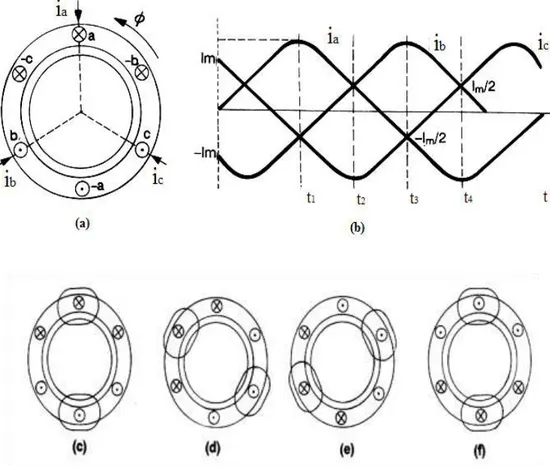
Disini akan dijelaskan bagaimana terjadinya medan putar itu, perhatikan gambar 2.2.
Gambar 2.2 : proses terjadinya medan putar
Misalkan kumparan a-a, b-b, c-c dihubungkan tiga phasa, dengan beda phasa masing – masing 120° (gambar 2.2) dan dialiri arus sinusoid. Distribusi , , sebagai fungsi waktu adalah seperti gambar 2.2. Pada keadaan , , dan fluks resultan yang ditimbulkan oleh kumparan tersebut masing masing adalah seperti gambar 2.2 c, d, e dan f. Pada fluks resultan mempunyai arah sama dengan arah fluks dihasilkan oleh kumparan b-b. Untuk , fluks resultannya berlawanan arah dengan fluks resultan yang dihasilhan pada saat .
1) Arah fluks yang ditimbulkan oleh arus yang mengalir dalam suatu lingkar
sesuai dengan perputaran sekrup (gambar 2.3.a ).
2) Kebesaran fluks yang ditimbulkan ini sebanding dengan arus yang mengalir.
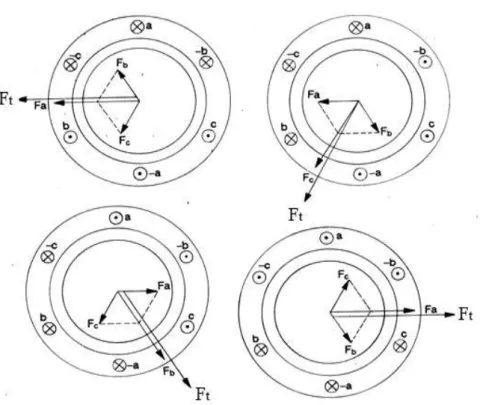
Gambar 2.3: Arah gaya (F) yang ditimbulkan fluks
Notasi yang dipakai untuk menyatakan positif atau negatifnya arus yang mengalir pada kumparan a – a, b – b, dan c – c pada Gambar 2.3 yaitu: harga positif, apabila tanda silang (x) terletak pada pangkal konduktor tersebut ( titik a, b, c ), sedangkan negatif apabila tanda titik ( . ) terletak pada pangkal konduktor tersebut. Maka diagram vektor untuk fluks total pada keadaan t1, t2, t3, t4, dapat dilihat pada Gambar 2.4.
2.4 Prinsip Kerja Motor Induksi Tiga Fasa
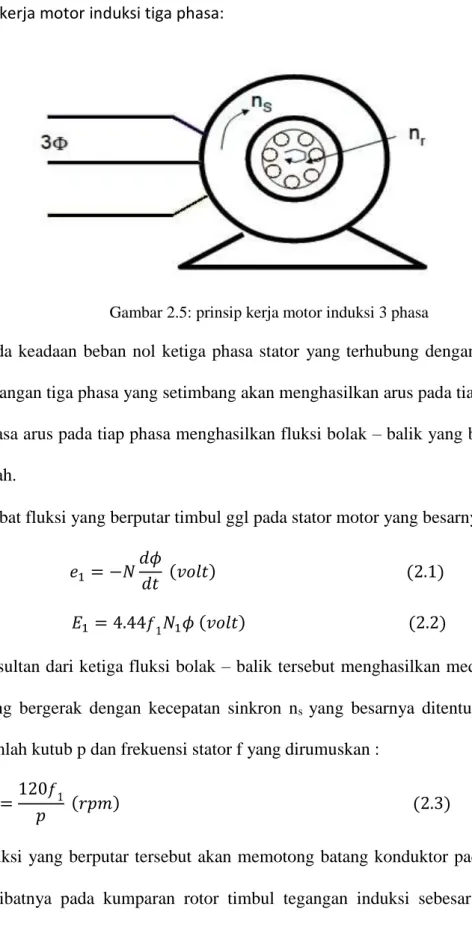
Untuk memperjelas prinsip kerja motor induksi tiga phasa, Ada beberapa prinsip kerja motor induksi tiga phasa:
Gambar 2.5: prinsip kerja motor induksi 3 phasa
1. Pada keadaan beban nol ketiga phasa stator yang terhubung dengan sumber tegangan tiga phasa yang setimbang akan menghasilkan arus pada tiap belitan phasa arus pada tiap phasa menghasilkan fluksi bolak – balik yang berubah -ubah.
2. akibat fluksi yang berputar timbul ggl pada stator motor yang besarnya :
3. Resultan dari ketiga fluksi bolak – balik tersebut menghasilkan medan putar yang bergerak dengan kecepatan sinkron ns yang besarnya ditentukan oleh
jumlah kutub p dan frekuensi stator f yang dirumuskan :
4. Fluksi yang berputar tersebut akan memotong batang konduktor pada rotor. Akibatnya pada kumparan rotor timbul tegangan induksi sebesar yang
besarnya :
Dimana:
E2 = tegangan induksi pada rotor saat rotor dalam keadaan diam (volt)
N2 = jumlah lilitan rotor
Φm= fluksi maksimum (Wb)
5. Karena kumparan rotor merupakan rangkaian tertutup, maka ggl tersebut akan menghasilkan arus I2
6. Adanya arus I2 di dalam medan magnet akan menimbulkan gaya F pada rotor
7. Bila kopel mula yang dihasilkan oleh gaya F cukup besar untuk memikul kopel beban, rotor akan berputar searah dengan medan putar stator.
8. Perputaran rotor akan semakin meningkat hingga mendekati kecepatan sinkron. Perbedaan kecepatan medan putar stator ( ) dengan kecepatan rotor ( ) disebut slip (s) dan dinyatakan dengan :
9. Pada saat rotor dalam keadaan berputar, besarnya tegangan yang terinduksi pada kumparan rotor akan bervariasi tergantung besarnya slip. Tegangan induksi ini dinyatakan dengan E2s yang besarnya :
dimana :
= tegangan induksi rotor dalam keadaan berputar (volt)
keadaan berputar )
10. Bila = , tegangan tidak akan terinduksi dan arus tidak akan mengalir pada kumparan rotor, sehingga tidak akan dihasilkan kopel. Kopel akan dihasilkan jika < .
2.5 Rangkaian Ekivalen Motor Induksi
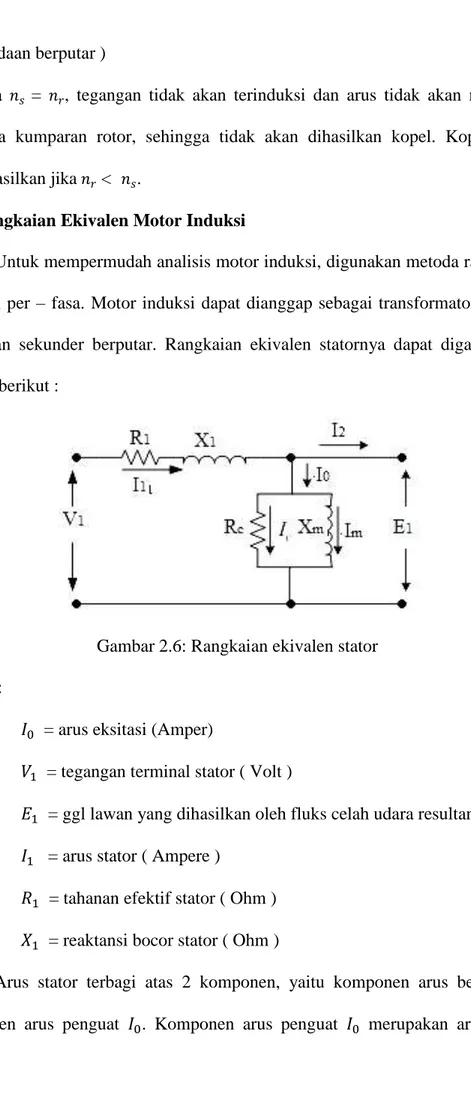
Untuk mempermudah analisis motor induksi, digunakan metoda rangkaian ekivalen per – fasa. Motor induksi dapat dianggap sebagai transformator dengan rangkaian sekunder berputar. Rangkaian ekivalen statornya dapat digambarkan sebagai berikut :
Gambar 2.6: Rangkaian ekivalen stator dimana :
= arus eksitasi (Amper)
= tegangan terminal stator ( Volt )
= ggl lawan yang dihasilkan oleh fluks celah udara resultan ( Volt ) = arus stator ( Ampere )
= tahanan efektif stator ( Ohm ) = reaktansi bocor stator ( Ohm )
Arus stator terbagi atas 2 komponen, yaitu komponen arus beban dan komponen arus penguat . Komponen arus penguat merupakan arus stator
tambahan yang diperlukan untuk menghasilkan fluksi celah udara resultan, dan merupakan fungsi ggm .
Komponen arus penguat terbagi atas komponen rugi – rugi inti yang
sefasa dengan dan komponen magnetisasi yang tertinggal 90° dari . Hubungan antara tegangan yang diinduksikan pada rotor sebenarnya ( rotor )
dan tegangan yang diinduksikan pada rotor ekivalen ( ) adalah :
atau
=
dimana adalah jumlah lilitan efektif tiap fasa pada lilitan stator yang banyaknya kali jumlah lilitan rotor.
Bila rotor – rotor diganti secara magnetik, lilitan – ampere masing – masing harus sama, dan hubungan antara arus rotor sebenarnya I rotor dan arus
pada rotor ekivalen adalah :
=
sehingga hubungan antara impedansi bocor frekuensi slip dari rotor ekivalen dan impedansi bocor frekuensi slip dari rotor sebenarnya adalah :
Nilai tegangan, arus dan impedansi tersebut diatas didefinisikan sebagai nilai yang referensinya ke stator. Selanjutnya persamaan dapat dituliskan :
dimana :
R2 = tahanan efektif referensi ( Ohm )
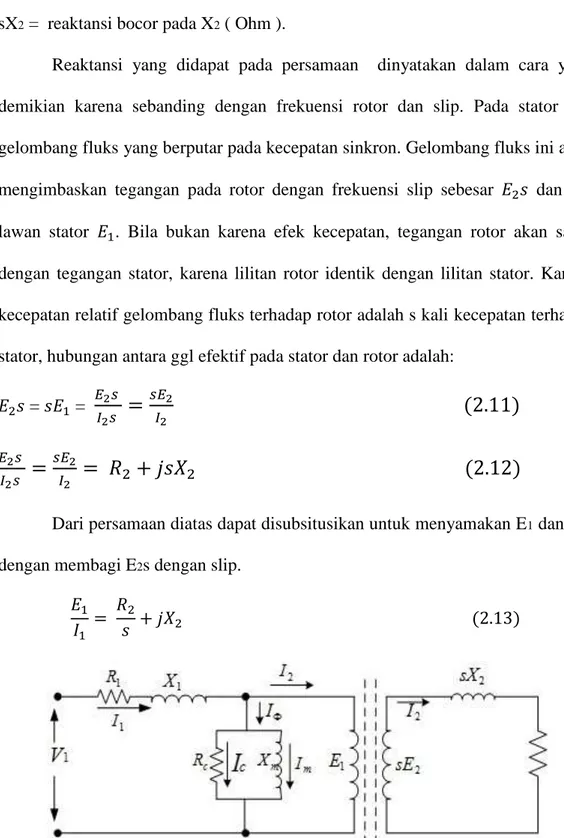
sX2 = reaktansi bocor pada X2 ( Ohm ).
Reaktansi yang didapat pada persamaan dinyatakan dalam cara yang demikian karena sebanding dengan frekuensi rotor dan slip. Pada stator ada gelombang fluks yang berputar pada kecepatan sinkron. Gelombang fluks ini akan mengimbaskan tegangan pada rotor dengan frekuensi slip sebesar dan ggl lawan stator . Bila bukan karena efek kecepatan, tegangan rotor akan sama dengan tegangan stator, karena lilitan rotor identik dengan lilitan stator. Karena kecepatan relatif gelombang fluks terhadap rotor adalah s kali kecepatan terhadap stator, hubungan antara ggl efektif pada stator dan rotor adalah:
= =
Dari persamaan diatas dapat disubsitusikan untuk menyamakan E1 dan E2s
dengan membagi E2s dengan slip.
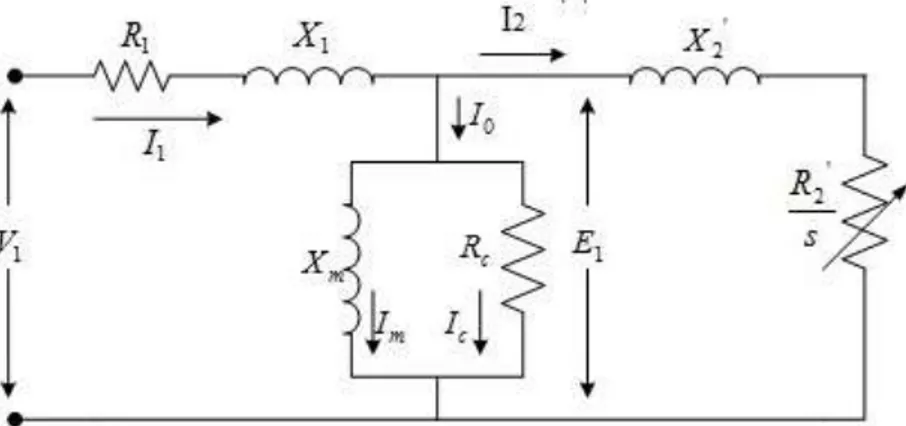
Gambar 2.7: Rangkaian ekivalen motor induksi
Gambar 2.8: Penyederhanaan rangkaian ekivalen motor induksi 2.6 Desain Motor Induksi Tiga Phasa
Standard NEMA pada dasarnya mengkategorikan motor induksi ke dalam empat kelas yakni disain A,B,C, dan D. Karakteristik torsi – kecepatannya dapat dilihat pada gambar 2.9.
.Gambar 2.9 Karakteristik torsi kecepatan motor induksi pada berbagai desain 1. Kelas A
Motor Induksi 3 fasa kelas A memiliki karakteristik sebagai berikut
Torsi awal normal (150 – 170%) dari nilai ratingnya) dan torsi breakdownya tinggi
Arus awal relatif tinggi dan Slip rendah ( 0.0015 < Slip < 0.005 )
Tahanan rotor kecil sehinga efisiensi tinggi
Baik digunakan untuk torsi beban kecil saat start dan cepat mencapai putaran penuhnya.
contoh : pompa dan fan 2. Kelas B
Motor Induksi 3 fasa kelas B memiliki karakteristik sebagai berikut
Torsi awal normal hampir sama seperti kelas A
Arus awal rendah ( lebih rendah 75% dari kelas A ) dan Slip rendah (slip < 0.005)
Arus awal dapat diturunkan karena rotor mempunyai reaktansi tinggi
Rotor terbuat dari plat atau saklar ganda
Efisiensi dan faktor dayanya pada saat berbeban penuh tinggi.
Contoh : fan, blower, dan motor generator set 3. Kelas C
Motor Induksi 3 fasa kelas C memiliki karakteristik sebagai berikut
Torsi awal lebih tinggi (200 % dari nilai ratingnya)
Arus awal rendah dan Slip rendah (slip < 0.005)
Reaktansi rotor lebih tinggi dari kelas B
Rotor menggunakan sankar rendah
Saat beban penuh slip cukup tinggi sehingga efisiensinya rendah (lebih rendah dari kelas A dan Kelas B).
4. Kelas D
Motor Induksi 3 fasa kelas D memiliki karakteristik sebagai berikut
Torsi awal yang paling tinggi dari kelas lainnya
Arus awal rendah dan Slip tinggi
motor ini cocok untuk aplikasi dengan perubahan beban dan perubahan kecepatan secara mendadak pada motor
Ketika torsi maksimum slip mencapai harga 0.5 atau lebih, sedangkan ketika beban penuh slip antara 8% hingga 15% sehingga efisiensinya rendah.
contoh : elevator, crane, dan ekstraktor. 2.7 Penentuan Parameter Motor Induksi
Data yang diperlukan untuk menghitung performansi dari suatu motor induksi dapat diperoleh dari hasil pengujian tanpa beban, pengujian rotor tertahan, dan pengukuran tahanan dc lilitan stator.
2.7.1 Pengujian Tanpa Beban ( No Load Test )
Pengujian tanpa beban pada motor induksi akan memberikan keterangan berupa besarnya arus magnetisasi dan rugi – rugi tanpa beban. Biasanya pengujian tersebut dilakukan pada frekuensi yang diizinkan dan dengan tegangan tiga phasa dalam keadaan setimbang yang diberikan pada terminal stator. Pembacaan diambil pada tegangan yang diizinkan setelah motor bekerja cukup lama, agar bagian – bagian yang bergerak mengalami pelumasan sebagaimanamestinya. Rugi – rugi rotasional keseluruhan pada frekuensi dan tegangan yang diizinkan pada waktu dibebani biasanya dianggap konstan dan sama dengan rugi – rugi tanpa beban.
Pada keadaan tanpa beban, besarnya arus rotor sangat kecil dan hanya diperlukan untuk menghasilkan torsi yang cukup untuk mengatasi gesekan. Karenanya rugi – rugi I2R tanpa beban cukup kecil dan dapat diabaikan. Pada transformator rugi – rugi I2R primernya tanpa beban dapat diabaikan, akan tetapi rugi – rugi stator tanpa beban motor induksi besarnya cukup berarti karena arus magnetisasinya lebih besar. Besarnya rugi – rugi rotasional PR pada keadaan
kerja normal adalah :
Dimana :
P1 = daya input tiga phasa
I0 = arus tanpa beban tiap phasa ( A )
R0 = tahanan stator tiap phasa ( ohm )
Karena slip pada keadaaan tanpa beban sangat kecil, maka akan mengakibatkan tahanan rotor R2/s sangat besar. Sehingga cabang paralel rotor dan
cabang magnetisasi menjadi jXm di shunt dengan suatu tahanan yang sangat
besar, dan besarnya reaktansi cabang paralel karenanya sangat mendekati Xm.
Sehingga besar reaktansi yang tampak X0 yang diukur pada terminal stator pada
keadaan tanpa beban sangat mendekati X1 + Xm, yang merupakan reaktansi
sendiri dari stator, sehingga :
Maka besarnya reaktansi diri stator, dapat ditentukan dari pambacaan alat ukur pada keadaan tanpa beban. Untuk mesin tiga phasa yang terhubung Y besarnya impedansi tanpa beban Z0/ phasa :
Di mana V0 merupakan tegangan line, pada pengujian tanpa beban.
Besarnya tahanan pada pengujian tanpa beban Rnl adalah :
P0 merupakan suplai daya tiga phasa pada keadaan tanpa beban, maka
besar reaktansi tanpa beban
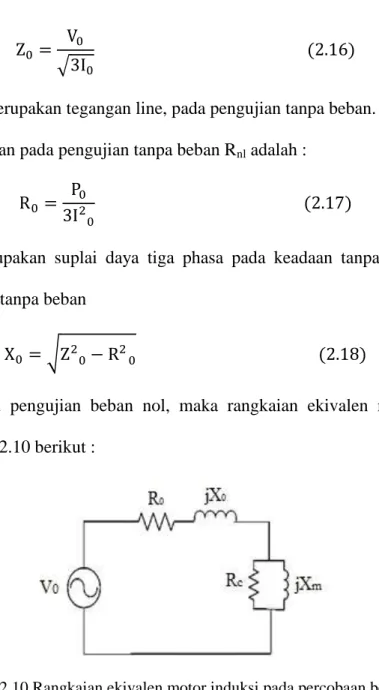
sewaktu pengujian beban nol, maka rangkaian ekivalen motor induksi seperti gambar 2.10 berikut :
Gambar 2.10 Rangkaian ekivalen motor induksi pada percobaan beban nol 2.6.2 Pengujian Tahanan Stator ( DC Test )
Untuk menentukan besarnya tahanan stator R1 dilakukan dengan test DC.
Pada dasarnya tegangan DC diberikan pada belitan stator motor induksi. Karena arus yang disuplai adalah arus DC, maka tidak terdapat tegangan yang diinduksikan pada rangkaian rotor sehingga tidak ada arus yang mengalir pada rotor. Dalam keadaan demikian, reaktansi dari motor juga bernilai nol, oleh karena itu, yang membatasi arus pada motor hanya tahanan stator.
rated, yang mana hal ini bertujuan untuk memanaskan belitan stator pada temperatur yang sama selama operasi normal. Apabila tahanan stator dihubung Y, maka besar tahanan stator/ phasa adalah :
Bila stator dihubung delta, maka besar tahanan stator.
Dengan diketahuinya nilai dari R1, rugi – rugi tembaga stator pada beban
nol dapat ditentukan, dan rugi – rugi rotasional dapat ditentukan sebagai selisih dari daya input pada beban nol dan rugi – rugi tembaga stator. Gambar 2.11 menunjukkan salah satu bentuk pengujian DC pada stator motor induksi yang terhubung Y.
Gambar 2.11 Rangkaian pengukuran untuk DC test 2.6.3 Pengujian Rotor Tertahan ( Block Rotor Test )
Pengujian ini bertujuan untuk menentukan parameter – parameter motor induksi, dan biasa juga disebut dengan locked rotor test. Pada pengujian ini rotor dikunci/ ditahan sehingga tidak berputar.
Untuk melakukan pengujian ini, tegangan AC disuplai ke stator dan arus yang mengalir diatur mendekati beban penuh. Ketika arus telah menunjukkan nilai beban penuhnya, maka tegangan, arus, dan daya yang mengalir ke motor diukur.
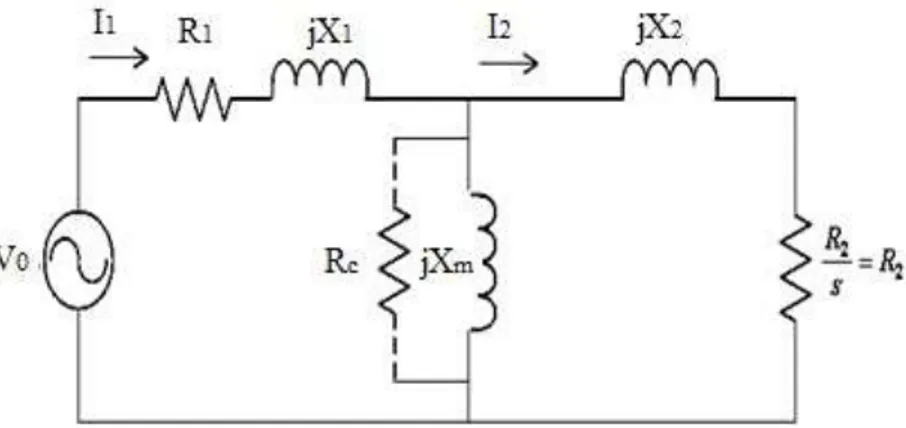
Rangkaian ekivalen untuk pengujian ini ada pada gambar 2.12
Gambar 2.12 Rangkaian ekivalen motor induksi pada percobaan block rotor test Saat pengujian ini berlangsung s = 1 dan tahanan rotor R2/s = R2. Karena
nilai R2 dan X2 begitu kecil, maka arus input akan seluruhnya mengalir melalui
tahanan dan reaktansi tersebut. Oleh karena itu, kondisi sirkit pada saat ini terlihat seperti kombinasi seri X1, R1, X2, dan R2. Sesudah tegangan dan frekuensi diatur,
arus yang mengalir pada motor diatur dengan cepat, sehingga tidak timbul kenaikan temperatur pada rotor dengan cepat. Daya input yang diberikan kepada motor adalah :
Dimana :
Vl-l = tegangan line pada saat pengujian berlansung
Il-l = arus line pada saat pengujian berlangsung
Dimana :Zsc = impedansi hubung singkat
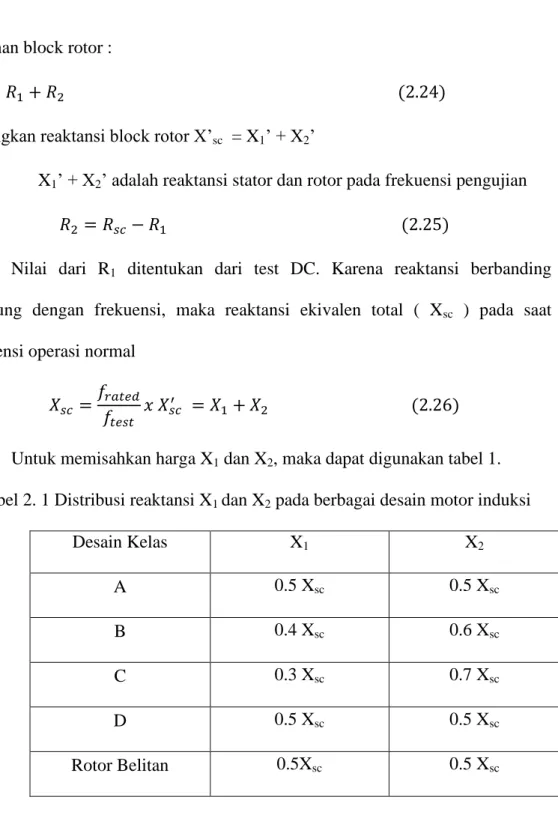
Tahanan block rotor :
Sedangkan reaktansi block rotor X’sc = X1’ + X2’
X1’ + X2’ adalah reaktansi stator dan rotor pada frekuensi pengujian
Nilai dari R1 ditentukan dari test DC. Karena reaktansi berbanding
langsung dengan frekuensi, maka reaktansi ekivalen total ( Xsc ) pada saat
frekuensi operasi normal
Untuk memisahkan harga X1 dan X2, maka dapat digunakan tabel 1.
Tabel 2. 1 Distribusi reaktansi X1 dan X2 pada berbagai desain motor induksi
Desain Kelas X1 X2 A 0.5 Xsc 0.5 Xsc B 0.4 Xsc 0.6 Xsc C 0.3 Xsc 0.7 Xsc D 0.5 Xsc 0.5 Xsc Rotor Belitan 0.5Xsc 0.5 Xsc
2.8 Pengereman pada motor induksi 3 fasa
Ada 4 macam metode pengereman pada motor induksi 3 phasa, yaitu: a. Regeneratif
Pengereman jenis regeneratif motor AC adalah sebuah sistem pengoperasian pengereman, motor induksi digerakkan oleh beban diatas kecepatan sinkron. Pada saat motor digerakkan diatas kecepatan sinkron, maka motor listrik berfungsi seperti sebuah generator induksi dan menghasilkan torsi pengereman. Energi yang dibentuk motor dialirkan kembali menuju saluran suplai.
b. Pengereman mekanik
Pengereman mekanik adalah cara memberhentikan motor listrik dengan memberlakukan gesekan atau friksi motor. Friksi tersebut diterapkan dengan cara yang sama seperti halnya block rem mobil.
Rem tersebut bekerja setelah daya hilang, yaitu block rem mengunci motor dengan gaya kerja pegas. Pada saat daya dihubungkan, solenoid diberi energi untuk menjaga agar armature tetap tertutup. Jika armature tertutup, maka pegas tertahan balik sehingga tetap mengerem motor. Rem mekanik dipakai pada sistem pengereman jika yang ada tidak cukup untuk membuat motor sehingga benar – benar berhenti.
c. Pengereman dinamik
Solenoid rem dapat disambungkan antara dua saluran suplai atau antara satu dari suplai dan netral. Solenoid disambungkan secara langsung pada saluran suplai motor.
Cara yang dipergunakan sebagai pengereman adalah menghilangkan suplay daya AC dari motor dan memberikan arus searah DC pada satu fasa stator. Pada pengereman dinamik, motor diberi reaksi seperti generator yang dibebani dan membangkitkan torsi sehingga memperlambat putaran motor serta dengan cepat menghentikan putaran motor. Pengereman dinamik menggunakan rangkaian dioda untuk megubah arus bolak balik (AC) menjadi arus searah (DC). Pengereman secara dinamik dapat menghentikan putaran tanpa terjadi sisa putaran pada motor karena pemberian arus DC pada belitan stator.
d. Pengereman plugging
Plug breaking merupakan pengereman motor dengan cara membalikkan arah motor sehingga motor dapat menghasilkan daya torsi penyeimbang dan membentuk daya perlambatan. Pada pengereman plungging sumber tegangan yang bekerja pada sirkuit jangkar adalah ( stator + rotor) yang disebut counter ggl stator. Hal ini akan menyebabkan kenaikan arus pada stator yang mencapai 50 kali arus mula. Sehingga semakin besar arus pada kumparan stator maka nilai hambatan akan semakin kecil, hal ini mempengaruhi terhadap suhu pada motor induksi tiga phasa.
= perubahan hambatan terhadap T
= hambatan awal = koefisien suhu = perubahan suhu
Jika hambatan semakin besar maka akan mempengaruhi besar arus listrik yang masuk dalam rangkaian sesuai dengan hukum ohm:
Sekamin besar hambatan R maka arus yang mengalir akan semakin kecil. Grafik hubungan hambatan dengan suhu adalah sebagai berikut:
Gambar 2.13 : hubungan R (hambatan) dengan T (suhu)
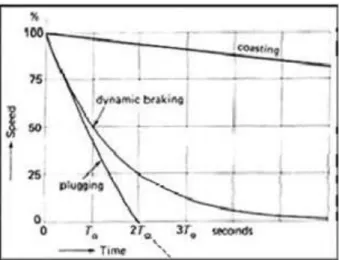
Kita bisa menghentikan motor bahkan lebih cepat dengan menggunakan metode yang disebut plugging. Ini terdiri dari tiba-tiba membalikkan arus medan dengan membalik terminal sumber, seperti ditunjukan pada gambar 2.14 dibawah.
Gambar 2.14: Kurva Kecepatan Pengereman
Lekuk pada gambar diatas memungkinkan kita untuk membandingkan pengereman plugging dan dinamis untuk pengereman awal yang sama saat ini. Perhatikan bahwa memasukkan motor benar-benar berhenti setelah selang waktu
2 To. Di sisi lain, jika pengereman dinamis digunakan, kecepatan masih 25 persen dari nilai aslinya pada saat ini.
Pada pengereman plugging dilakukan balik putaran pada motor induksi tiga phasa tanpa menekan tombol stop pada rangkaian kontrol. Untuk membalik arah putaran motor induksi 3 fasa adalah dengan membalik salah satu polaritas tegangan yang masuk ke motor. coba perhatikan gambar dibawah ini.
Gambar 2.15: Rangkaian membalikkan putaran
Pada gambar diatas terlihat kalau motor akan berputar ke kanan (forward) jika terminal belitan/winding motor menerima tegangan RST dengan R terhubung dengan U, S terhubung dengan V dan T terhubung dengan W. Dan motor akan berputar ke arah sebaliknya (reverse) jika terminal winding motor menerima tegangan RST dengan R terhubung dengan U, S terhubung dengan W dan T terhubung dengan V. Dengan kata lain tegangan RST dibalik menjadi RTS. Membalik dengan polaritas yang lain juga bisa, seperti R dengan S, atau R dengan T.
Untuk mengubah atau membalik polaritas tegangan RST itu biasanya digunakan rangkaian pengendali mekanik dan magnetik yaitu rangkaian
kontaktor. Dan sebagai pengaman motor dipasang juga pelindung motor (thermal overload). Perhatikan gambar diagram utama/daya forward reverse berikut ini.
Gambar 2.16: Rangkaian forward dan reverse pada motor induksi tiga phasa Gambar 2.16 menunjukkan bahwa motor akan berputar ke kanan(forward), jika K1 bekerja. Saat kontaktor 1 bekerja, tegangan RST akan masuk ke motor secara berurutan. Dan gambar diatas juga menjelaskan kalau motor akan berputar ke kiri(reverse), jika K2(kontaktor 2) bekerja. Saat K2 bekerja maka polaritas tegangan RST yang masuk kemotor akan dibalik menjadi TSR.(lihat gambar diatas).dan yang terjadi adalah motor akan berputar ke kiri.
Untuk mengatur atau mengendalikan kedua kontaktor tersebut diperlukan rangkaian kontrol forward reverse. Dan dibawah ini adalah diagram rangkaian kontrol forward reverse. Perhatikan gambar berikut, dan pahami bagaimana cara kerjanya.
Gambar 2.17: Rangkaian kendali forward dan reverse motor induksi tiga phasa
Pada gambar 2.17 diatas terlihat bahwa arus listrik akan mengalir dan mengaktifkan K1 jika tombol ON1 ditekan. Meskipun ON1 dilepas K1 akan tetap aktif, hal ini dikarenakan ada interlock dari kontak bantu NO (K1) yang dipasang pararel dengan ON1. Sehingga arus listrik tetap mengalir ke koil kontaktor lewat kontak bantu NO (K1) tersebut. Saat K1 aktif hal ini berarti motor berputar ke kanan(forward). Dari gambar diatas juga terlihat adanya kontak bantu NC (K1) yang dipasang secara seri dengan koil K2, dan sebaliknya kontak bantu NC (K2) yang dipasang seri denga koil K1. Kontak bantu NC disini berfungsi sebagai interlock pengaman. Misalnya, jika ON1 ditekan dan K1 aktif (motor berputar forward), meskipun ON2 ditekan maka arus listrik tidak akan mengalir ke koil K2, karena NC (K1) tersebut telah membuka. Dan untuk melakukan pengereman
dengan membalik putaran (reverse) sehingga K1 off dan tombol ON2 sekarang bisa ditekan untuk mengaktifkan koil K2. Sehingga motor bisa berputar ke kiri (reverse) ketika putaran mendekati nol maka di tekan tombol OFF.
2.9 Metode Pengukuran Temperatur
Berikut ini adalah metode dalam menentukan temperatur motor induksi [4] yaitu :
a. Menggunakan thermometer Infrared
Metode ini adalah penentuan suhu dengan sensor suhu, atau dengan termokopel, dengan metode ini instrumen diterapkan pada bagian terpanas dari mesin yang dapat diakses .
b. Mengukur Temperatur Lilitan motor
Penentuan temperature dengan metode ini yaitu dengan membandingkan tahanan lilitan motor pada temperature yang ingin ditentukan dengan tahanan yang sudah diketahui temperaturnya. Temperature tahanan yang ingin ditentukan dapat dihitung dengan persamaaan :
Dimana : Tt : Temperatur total lilitan (oC)
Tb : Temperatur pada saat motor dingin (oC)
Rt : Tahanan pada saat motor panas (ohm)
Rb : Tahanan pada saat motor dingin (ohm)
225 ( konstanta untuk bahan aluminium ) (oC)
c. Menggunakan Pendeteksi Temperatur Lokal
Denga pendeteksi temperature lokal berbagai panas bagian mesin dapat ditentukan dengan menggunakan detektor ini.detektor ini ditempatkan di dekat dengan bagian mana suhu lokal akan diukur . Contoh detektor suhu local, sensor inframerah, termokopel, termometer resistensi kecil, dan termistor. Detector ini sering dipasang sebagai bagian permanen dari mesin .
2.10 Jatuh Tegangan (Voltage Drop)
Jatuh tegangan merupakan besarnya tegangan yang hilang pada suatu penghantar. Jatuh tegangan atau jatuh tegangan pada saluran tenaga listrik secara umum berbanding lurus dengan panjang saluran dan beban serta berbanding terbalik dengan luas penampang penghantar [2].
Besarnya jatuh tegangan dinyatakan baik dalam % atau dalam besaran volt. Besarnya batas atas dan batas bawah ditentukan oleh kebijaksanaan perusahaan kelistrikan. Perhitungan jatuh tegangan praktis pada batas – batas tertentudengan hanya menghitung besarnya tahanan masih dapat dipertimbangkan, namun pada sistem jaringan khususnya pada sistem tegangan menengah masalah induktansi dan kapasitansinya diperhitungkan karena nilainya cukup berarti.
Perhitungan Voltage Drop (Tegangan Jatuh) Pada penghantar, Pada penghantar konduktor pasti memiliki nilai impedansi dan sehingga setiap kali arus mengalir melalui penghantar tersebut, akan ada jatuh tegangan disepanjang penghantar, yang dapat diturunkan dengan Hukum Ohm (yaitu V = IZ ). Penurunan tegangan tersebut tergantung pada dua hal, yaitu :
1. Aliran arus melalui penghantar - semakin tinggi arus, semakin besar tegangan drop
2. Impedansi konduktor - semakin besar impedansi, semakin besar tegangan drop
Untuk sistem suplay tegangan AC , metode menghitung jatuh tegangan (voltage drop) adalah dengan berdasarkan faktor beban dengan mempertimbangkan arus beban penuh pada suatu sistim. Tetapi jika beban memiliki arus startup tinggi (misalnya motor) , maka tegangan drop dihitung dengan berdasarkan pada arus start up motor tersebut serta faktor daya .
Dimana :
∆V = jatuh tegangan pada kawat (volt) k = 2 untuk sistem satu fasa (1φ) k = untuk sistem tiga fase (3φ)
= arus beban (A)
L = panjang penghantar (km)
n = jumlah penghantar paralel perfasa R = tahanan satu kabel (Ω /km) X = reaktansi satu kabel (Ω /km) = faktor daya beban
Atau dapat juga ditulis alam bentuk persentase :
Dimana :
∆ V = jatuh tegangan (volt)
Vs = tegangan di sisi pengirim (volt) Vr = tegangan di sisi penerima (volt) ∆V (%) = rugi tegangan dalam persen ∆ V = rugi tegangan (volt)