PENGEMBANGAN PERANGKAT UJI PUPUK MENGGUNAKAN
KAMERA DENGAN KLASIFIKASI NEURAL NETWORK
TIFFANY AFIF YOLANDA
DEPARTEMEN ILMU KOMPUTER
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM INSTITUT PERTANIAN BOGOR
BOGOR 2017
PERNYATAAN MENGENAI SKRIPSI DAN
SUMBER INFORMASI SERTA PELIMPAHAN HAK CIPTA
Dengan ini saya menyatakan bahwa skripsi berjudul Pengembangan Perangkat Uji Pupuk menggunakan Kamera dengan Klasifikasi Neural Network adalah benar karya saya dengan arahan dari komisi pembimbing dan belum diajukan dalam bentuk apa pun kepada perguruan tinggi mana pun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir skripsi ini.Dengan ini saya melimpahkan hak cipta dari karya tulis saya kepada Institut Pertanian Bogor.
Bogor, Mei 2017
Tiffany Afif Yolandai
ABSTRAK
TIFFANY AFIF YOLANDA. Pengembangan Perangkat Uji Pupuk menggunakan Kamera dengan Klasifikasi Neural Network. Dibimbing oleh HERU SUKOCO dan LADIYANI R WIDOWATI.
Tanah membutuhkan pupuk untuk kesuburan tanah. Dosis pupuk yang baik akan memperbaiki kondisi tanah. Penelitian ini mengembangkan perangkat tes pupuk yang merupakan pengembangan dari perangkat yang sudah ada yang disebut Perangkat Uji Pupuk (PUP). PUP menggunakan larutan pupuk dalam tabung gelas dan menghasilkan warna tertentu. Kemudian, seorang peneliti menggunakan grafik warna dan membandingkannya dengan warna dalam tabung untuk mengetahui konsentrasi pupuk. Oleh karena itu, pengembangan perangkat pupuk adalah untuk membantu orang menentukan konsentrasi pupuk dengan mudah tanpa memerlukan seorang peneliti. Metode yang digunakan ialah Neural Network pada proses klasifikasi dan RGB pada sistem pewarnaan yang digunakan. Data yang digunakan pada penelitian ini adalah citra hasil penelitian Fajri (2014) dan citra hasil pengambilan langsung pada laboratorium Balai Penelitian Tanah. Klasifikasi yang dibangun menggunakan nilai pembelajaran 0.15, input layer 3 node, hidden layer 5
node, dan output layer 1 node. Iterasi paling baik pada penelitian ini yaitu iterasi
18. Akurasi tertinggi 60% pada pupuk P dengan nilai RMSE 0.76 dan 32% pada pupuk N dengan nilai RMSE 0.57.
Kata kunci: Neural Network, Perangakat Uji Pupuk, RGB, RMSE
ABSTRACT
TIFFANY AFIF YOLANDA. The development of fertilizer test kit using camera
base on Neural Network Classification. Supervised by HERU SUKOCO and
LADIYANI R WIDOWATI.
Soil needs manure for its fertility. An appriate dose of manure will improve the soil condition. This research is to develop a fertilizer test kit which is a development of the existing tool kit called Perangkat Uji Pupuk (PUP). PUP uses liquid manure in a glass tube and produce a specific color. Then, an expert use a color chart and compare it with the color in the tube to determine concentration of manure. Therefore, the development of fertilizer test kit is to help people determining the concentration of manure easily without the need of expert. The method used Neural Network in the process of classification and RGB coloring system. The data used in this study are images of Fajri’s (2014) research and the captured images directly at the Indonesian Soil Research Institute laboratory. Neural Networks are built using the learning value of 0.15, 3 nodes for input node, 5 nodes for hidden node, and 1 node for output node. The best Iteration of this research is iteration 18. The highest accuracy of 60% in SP-36 fertilizer with RMSE values of 0.76 and 32% on urea fertilizer with RMSE value of 0.57.
Skripsi
sebagai salah satu syarat untuk memperoleh gelar Sarjana Komputer
pada
Departemen Ilmu Komputer
PENGEMBANGAN PERANGKAT UJI PUPUK
MENGGUNAKAN KAMERA DENGAN KLASIFIKASI NEURAL
NETWORK
TIFFANY AFIF YOLANDA
DEPARTEMEN ILMU KOMPUTER
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM INSTITUT PERTANIAN BOGOR
BOGOR 2017
Penguji :
Judul Skripsi : Pengembangan Perangkat Uji Pupuk menggunakan Kamera dengan Klasifikasi Neural Network
Nama : Tiffany Afif Yolanda NIM : G64134002
Disetujui oleh
DrEng Heru Sukoco, SSi MT Pembimbing I
Dr Ladiyani R Widowati, MSc Pembimbing II
Diketahui oleh
Dr Ir Agus Buono, MSi MKom Ketua Departemen
PRAKATA
Puji dan syukur penulis panjatkan kepada Allah Subhana wa ta'ala.Shalawat serta salam semoga senantiasa dilimpahkan kepada Nabi Muhammad, keluarganya, sahabatnya, dan kepada kita yang selau berusaha menggapai ridha Allah. Penyusunan tugas akhir yang berjudul Pengembangan uji pupuk digital menggunakan kamera dengan metode Neural Network dapat diselesaikan. Tugas akhir ini tidak dapat diselesaikan tanpa adanya bantuan dari berbagai pihak. Oleh karena itu, penulis ingin mengucapkan terimakasih dan penghargaan yang setinggi-tingginya kepada:
Kedua orang tua dan Keluarga besar yang selalu memberikan doa dan dukungannya.
Bapak DrEng Heru Sukoco, SSi MT dan Ibu Dr Ladiyadi R Widowati, MSc selaku pembimbing yang selalu sabar dalam membimbing dan memberikan saran selama penelitian ini.
Ibu Dr Ir Sri Wahjuni, MT selaku penguji yang memberikan masukan-masukan yang membangun.
Balai Penelitian Tanah yang telah membantu memperoleh data untuk penelitian ini.
Teman seperjuangan Ka Syeiva, Nino, Asep, Heri Agung, Tentri, Restu, Nindy, Kusuma, Fahmi, Ferry yang telah memberikan semangat, dukungan, dan masukan. Serta Riko dan Ka Aji selaku rekan dalam pengambilan data di Balai Penelitian Tanah.
Departemen Ilmu Komputer IPB, staf dan dosen yang telah banyak membantu selama masa perkuliahan hingga penelitian.
Semoga penelitian ini bermanfaat.
Bogor, Mei 2017
DAFTAR ISI
DAFTAR TABEL vi DAFTAR GAMBAR vi DAFTAR LAMPIRAN vi PENDAHULUAN 1 Latar Belakang 1 Perumusan Masalah 2 Tujuan Penelitian 2 Manfaat Penelitian 2Ruang Lingkup Penelitian 2
METODE 2
Data Penelitian 2
Tahapan Penelitian 2
Pengambilan Data 2
Praproses 3
Pembuatan Model Klasifikasi 3
Pengujian dan Evaluasi 6
HASIL DAN PEMBAHASAN 7
Pengambilan Data 7
Data Penelitian 9
Praproses 9
Perhitungan Akurasi 11
Evaluasi 12
SIMPULAN DAN SARAN 13
Simpulan 13
Saran 13
DAFTAR PUSTAKA 13
DAFTAR TABEL
1 Detail Pembangunan Klasifikasi 10
2 Pengujian Akurasi 11
DAFTAR GAMBAR
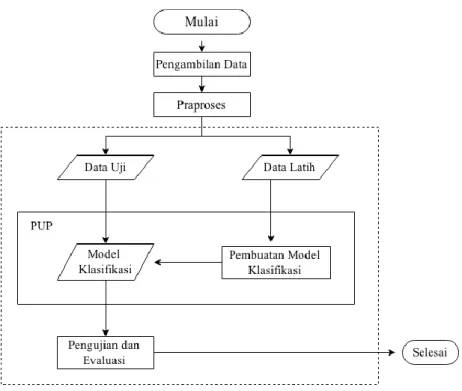
1 Tahapan metode penelitian 3
2 Pewarnaan RGB (Sumber : colorcodehex.com 2016) 4
3 Arsitektur Neural Network 4
4 Ilustrasi tahapan pelatihan 5
5 Fungsi aktivasi 6
6 Gradasi warna pupuk N (Sumber : Balittanah 2015) 7 7 Gradasi warna pupuk P (Sumber : Balittanah 2015) 8
8 Proses Praproses 9
9 Implemantasi Arsitektur Neural Network Backprogation 10
10 Perbandingan Akurasi Pupuk Urea 11
11 Perbandingan Akurasi Pupuk SP-36 11
12 Perbandingan RMSE Pupuk Urea 12
13 Perbandingan RMSE Pupuk SP-36 12
DAFTAR LAMPIRAN
1 Penetapan kadar pupuk N 15
PENDAHULUAN
Latar BelakangPupuk digunakan untuk menyuburkan tanah dan petani menggunakannya untuk meningkatkan produktifitas hasil tanaman. Ia merupakan faktor produksi penting pada sektor pertanian dalam meningkatkan produksi akan tanaman tersebut. Mahalnya harga pupuk yang beredar membuat beberapa orang mulai melirik menjadi pengusaha untuk mendapatkan keuntungan. Namun, tidak semua yang beredar berkualitas baik (Balittanah 2014).
Penanggulangan beredarnya pupuk palsu atau berkualitas rendah dapat diatasi dengan menngunakan sebuah perangkat uji pupuk. Pupuk yang beredar harus memenuhi standar mutu dari laboratorium Balai Penelitian Tanah. Kementrian pertanian sudah membuat Perangkat Uji Pupuk (PUP) yang dapat digunakan untuk melakukan tes uji unsur hara nitrogen dan fosfor pada pupuk. Kendala selanjutnya dari hasil laboratorium atau dengan PUP kit harus disamakan dengan bagan warna yang menjadi acuan standar. Pembacaan pewarnaan yang seragam memunculkan gagasan perlunya sebuah alat yang dapat membaca secara langsung kandungan pupuk dengan bagan warna secara cepat.
Penelitian ini bertujuan untuk meningkatkan ketelitian pembacaan kandungan unsur hara di dalam pupuk dengan waktu singkat. Bagan warna konvensional digantikan oleh suatu algoritme yang dapat membedakan hasil larutan dengan data gambar yang akan menghasilkan informasi. Algoritme ini digunakan untuk menentukan perhitungan yang tepat untuk mendekati hasil laboratorium dalam pengembangan PUP yang lebih cepat dan efisien. Hasil dari algoritme ini adalah pendeteksian kandungan hara dalam pupuk secara otomatis. Pengujian larutan pupuk menggunakan metode Neural Network dengan kelompok pewarnaan red,
green, dan blue (RGB). Metode Neural Network dipilih karena metode ini mampu
memodelkan hubungan komplek antara input dan output. Input merupakan nilai warna larutan dan output nilai presentasi akurasi kandungan berdasarkan data yang dimasukan ke dalam sistem. Metode ini dianggap mampu untuk menangani pembacaan pola, pemprosesan kontrol, dan mampu memecahkan permodelan yang bentuk eksplisit dari hubungan antara variabel tertentu tidak diketahui (Fausett 1994).
Fajri (2014) melakukan penelitian menggunakan metode k-NN pada pemprosesan data, kamera untuk sensor alat PUP, pewarnaan HSV, dan implementasi berupa alat PUP digital dengan arduino menghasilkan akurasi sebesar 70% untuk pupuk N dengan RMSE 3.32 dan 18.33% pada pupuk P dengan RMSE 5.79. Fenrizal (2014) menggunakan metode k-NN, pewarnaan mengunakan fitur
histogram hue pada HSV, dan pengimplementasi berupa aplikasi berbasis andorid
menghasilkan akurasi sebesar 79.54% dengan nilai RMSE 1.59 pada pupuk N dan akurasi untuk pupuk P adalah 30% dengan nilai RMSE 4.764. Penelitian Maulana (2016) menggunakan metode support vector machine, pendeteksian menggunakan sensor warna yang mendeteksi frekuensi warna RGB, dan menghasilkan akurasi 96% untuk pupuk N dan 94% untuk pupuk P. Pada penelitian ini menggunakan sensor kamera dengan metode neural network dan pewarnaan RGB.
2
Perumusan Masalah
Masalah yang diteliti dalam penelitian ini adalah mencari algoritme yang dapat mengklasifikasikan kandungan di dalam pupuk terutama Nitrogen (N) dan Fosfor (P) untuk diimplementasikan pada perangkat perangkat uji pupuk agar dapat memudahkan dalam pembacaan pewarnaan pada pupuk. Penelitian dilakukan dengan menggunakan sensor kamera, dimana pada sensor kamera pewarnaan yang digunakan adalah pewarnaan RGB.
Tujuan Penelitian Tujuan dari penelitian ini adalah:
1 Mengimplementasikan algoritme bagan warna dengan pengelompokan warna RGB menggunakan metode Neural Network pada pengolahan citra.
2 Meningkatkan akurasi dalam pembacaan warna pupuk (N dan P). Manfaat Penelitian
Manfaat dari penelitian ini adalah untuk mempermudah pemprosesan klasifikasi kadar hara pada pupuk N dan pupuk P dengan pewarnaan digital. Dengan terbangunnya PUP dengan pembacaan digital diharapkan mempermudah peneliti, petani, dan pedagang untuk mengetahui kadar pupuk secara cepat.
Ruang Lingkup Penelitian Ruang lingkup dari penelitian ini adalah:
1 Pengukuran kadar pupuk yang diteliti adalah Nitrogen (N) dan Fosfor (P). 2 Pewarnaan yang digunakan adalah RGB.
3 Kadar pupuk N (5% - 20%) dan kadar pupuk P (5% - 20%)
METODE
Data Penelitian
Data yang digunakan pada penelitian ini adalah data citra pada penelitian Fajri (2014) dan data asli hasil pengambilan di Laboratorium Balai Penelitian Tanah. Data citra akan dibagi menjadi data latih dan data uji. Kedua data tersebut akan digabungkan untuk melihat kesinambungan dari penelitian sebelumnya dan penelitian ini.
Tahapan Penelitian
Tahapan-tahapan yang dilakukan pada penelitian ini dapat dilihat pada Gambar 1.
Pengambilan Data
Penelitian ini menggunakan citra warna larutan yaitu larutan nitrogen dan larutan fosfor. Data larutan nitrogen merupakan hasil citra dari larutan N titrisol dan larutan pupuk urea, dan data larutan fosfor merupakan hasil citra pada KH2PO4 dan larutan pupuk SP-36 dengan kadar nitrogen dan fosfor antara 1% sampai 20% dengan
3 selisih tiap akusisi sebesar 1% untuk N dan 2% untuk P. Data diproses menggunakan komputer, apabila akurasi yang dihasilkan telah baik akan dijalankan pada PUP digital yang sudah dikembangkan oleh Fajri (2014).
Gambar 1 Tahapan metode penelitian Praproses
Praproses terdiri dari cropping dan resizing, ekstrasi fitur. Pada cropping dan
resizing diambil satu titik tengah pada citra dengan ukuran 50 x 50 pixel. Proses
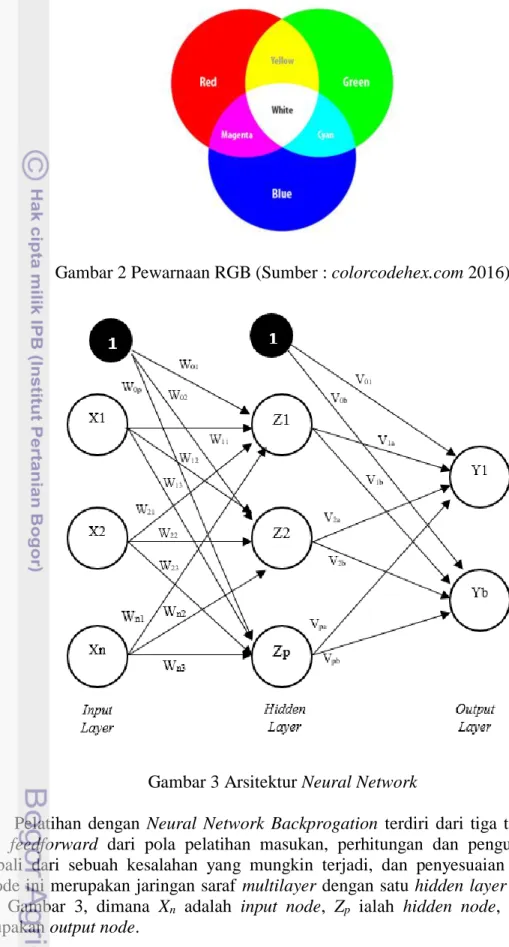
ini dilakukan untuk mengambil sampel dari warna dominan pada setiap citra dan menurunkan waktu komputasi pengolahan citra. Selanjutnya adalah proses ekstrasi fitur, pada proses ini data acuan pupuk yang menggunakan pewarnaan RGB akan diambil nilai dominan dari citra yang memiliki tiga warna dasar merah, hijau, dan biru seperti Gambar 2. Warna dominan diambil dengan menggunakan K-means
clustering yang dimana metode ini biasa digunakan untuk membagi sekumpulan
data secara otomatis kedalam kelompok k tertentu. Nilai k digunakan untuk mendefinisikan jumlah kelompok (Wagstaff et al. 2001).
𝑑(𝑥, 𝑦) = |𝑥 − 𝑦| = √∑𝑛 (𝑥𝑖− 𝑦𝑖)2
𝑖=1 (1)
Untuk menghitung jarak Euclidean dapat menggunakan Persamaan 1, di mana
d merupakan dimensi dari sebuah data, x dan y adalah dua buah data yang akan
dihitung jaraknya, dan n adalah nilai maksimal dari nilai k yang akan dihitung. Pembuatan Model Klasifikasi
Klasifikasi menggunakan metode Neural Network Backprogation. Metode ini merupakan sekelompok pemrosesan data yang dimodelkan seperti jaringan saraf manusia (fausett 2014). Menurut Raul Rojas (1996) Neural Network merupakan upaya pemodelan pemrosesan informasi kemampuan sistem saraf yang mempertimbangkan sifat penting dari jaringan saraf biologis dari sudut pandang
4
informasi pengolahan. Hal ini akan memungkinkan untuk merancang model abstrak buatan yang kemudian dapat disimulasikan dan dianalisis.
Gambar 2 Pewarnaan RGB (Sumber : colorcodehex.com 2016)
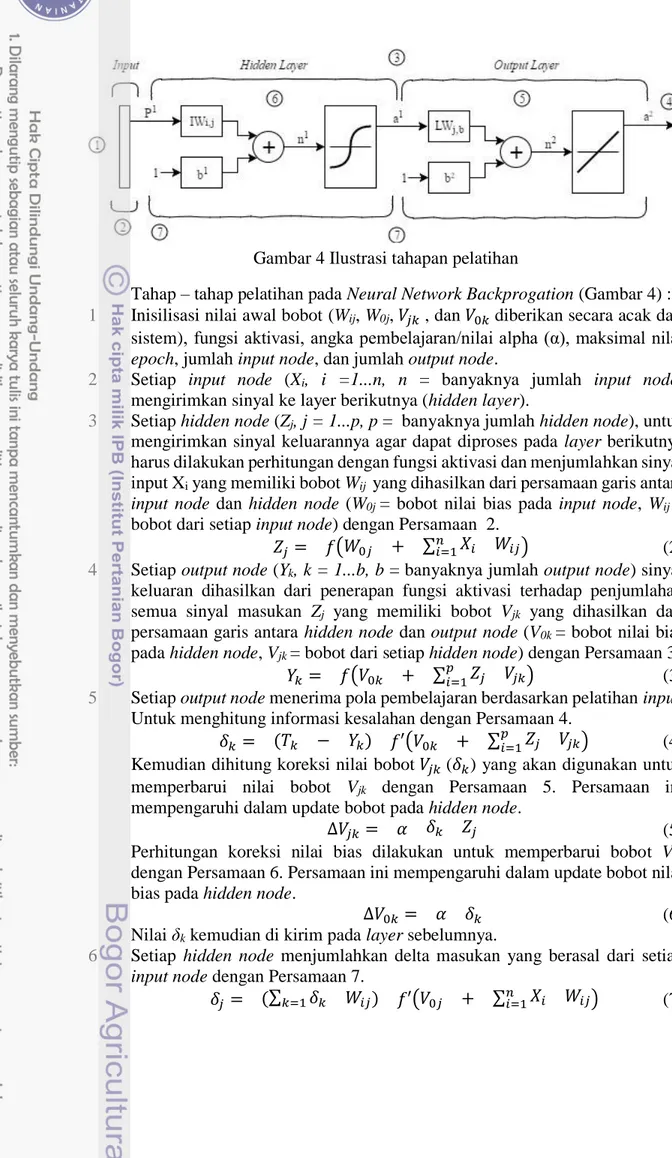
Gambar 3 Arsitektur Neural Network
Pelatihan dengan Neural Network Backprogation terdiri dari tiga tahapan yaitu feedforward dari pola pelatihan masukan, perhitungan dan pengulangan kembali dari sebuah kesalahan yang mungkin terjadi, dan penyesuaian bobot. Metode ini merupakan jaringan saraf multilayer dengan satu hidden layer seperti pada Gambar 3, dimana Xn adalah input node, Zp ialah hidden node, dan Yb merupakan output node.
5
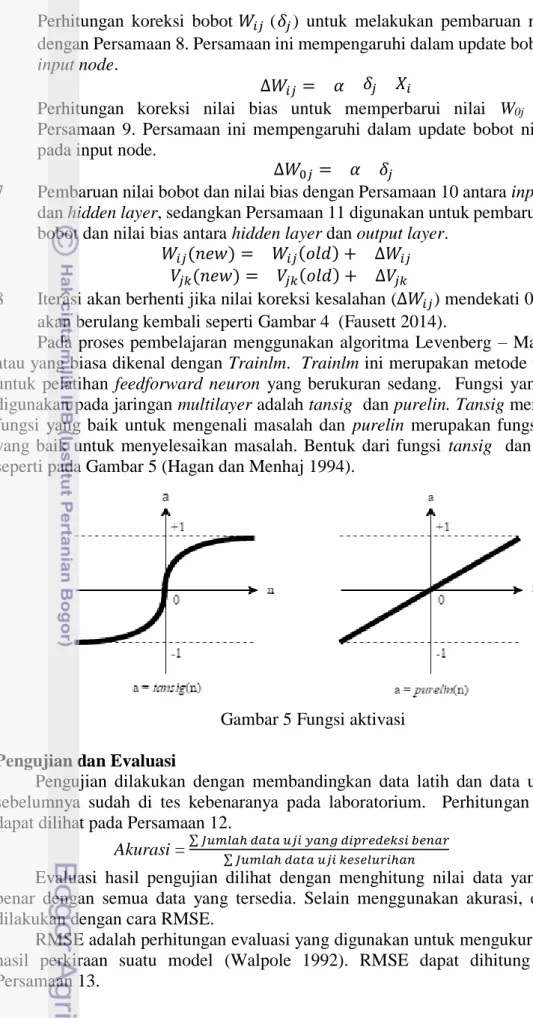
Gambar 4 Ilustrasi tahapan pelatihan
Tahap – tahap pelatihan pada Neural Network Backprogation (Gambar 4) : 1 Inisilisasi nilai awal bobot (Wij, W0j, 𝑉𝑗𝑘 , dan 𝑉0𝑘 diberikan secara acak dari
sistem), fungsi aktivasi, angka pembelajaran/nilai alpha (α), maksimal nilai
epoch, jumlah input node, dan jumlah output node.
2 Setiap input node (Xi, i =1...n, n = banyaknya jumlah input node)
mengirimkan sinyal ke layer berikutnya (hidden layer).
3 Setiap hidden node (Zj, j = 1...p, p = banyaknya jumlah hidden node), untuk
mengirimkan sinyal keluarannya agar dapat diproses pada layer berikutnya harus dilakukan perhitungan dengan fungsi aktivasi dan menjumlahkan sinyal input Xi yang memiliki bobot Wij yang dihasilkan dari persamaan garis antara
input node dan hidden node (W0j = bobot nilai bias pada input node, Wij = bobot dari setiap input node) dengan Persamaan 2.
𝑍𝑗 = 𝑓(𝑊0𝑗 + ∑𝑛𝑖=1𝑋𝑖 𝑊𝑖𝑗) (2) 4 Setiap output node (Yk, k = 1...b, b = banyaknya jumlah output node) sinyal
keluaran dihasilkan dari penerapan fungsi aktivasi terhadap penjumlahan semua sinyal masukan Zj yang memiliki bobot Vjk yang dihasilkan dari persamaan garis antara hidden node dan output node (V0k = bobot nilai bias pada hidden node, Vjk = bobot dari setiap hidden node) dengan Persamaan 3
𝑌𝑘 = 𝑓(𝑉0𝑘 + ∑𝑝𝑖=1𝑍𝑗 𝑉𝑗𝑘) (3) 5 Setiap output node menerima pola pembelajaran berdasarkan pelatihan input.
Untuk menghitung informasi kesalahan dengan Persamaan 4.
𝛿𝑘 = (𝑇𝑘 − 𝑌𝑘) 𝑓′(𝑉0𝑘 + ∑𝑝𝑖=1𝑍𝑗 𝑉𝑗𝑘) (4) Kemudian dihitung koreksi nilai bobot 𝑉𝑗𝑘 (𝛿𝑘) yang akan digunakan untuk memperbarui nilai bobot Vjk dengan Persamaan 5. Persamaan ini mempengaruhi dalam update bobot pada hidden node.
∆𝑉𝑗𝑘 = 𝛼 𝛿𝑘 𝑍𝑗 (5)
Perhitungan koreksi nilai bias dilakukan untuk memperbarui bobot V0k dengan Persamaan 6. Persamaan ini mempengaruhi dalam update bobot nilai bias pada hidden node.
∆𝑉0𝑘 = 𝛼 𝛿𝑘 (6)
Nilai δk kemudian di kirim pada layer sebelumnya.
6 Setiap hidden node menjumlahkan delta masukan yang berasal dari setiap
input node dengan Persamaan 7.
6
Perhitungan koreksi bobot 𝑊𝑖𝑗 (𝛿𝑗) untuk melakukan pembaruan nilai Wij dengan Persamaan 8. Persamaan ini mempengaruhi dalam update bobot pada
input node.
∆𝑊𝑖𝑗= 𝛼 𝛿𝑗 𝑋𝑖 (8)
Perhitungan koreksi nilai bias untuk memperbarui nilai W0j dengan Persamaan 9. Persamaan ini mempengaruhi dalam update bobot nilai bias pada input node.
∆𝑊0𝑗 = 𝛼 𝛿𝑗 (9)
7 Pembaruan nilai bobot dan nilai bias dengan Persamaan 10 antara input layer dan hidden layer, sedangkan Persamaan 11 digunakan untuk pembaruan nilai bobot dan nilai bias antara hidden layer dan output layer.
𝑊𝑖𝑗(𝑛𝑒𝑤) = 𝑊𝑖𝑗(𝑜𝑙𝑑) + ∆𝑊𝑖𝑗 (10) 𝑉𝑗𝑘(𝑛𝑒𝑤) = 𝑉𝑗𝑘(𝑜𝑙𝑑) + ∆𝑉𝑗𝑘 (11) 8 Iterasi akan berhenti jika nilai koreksi kesalahan (∆𝑊𝑖𝑗) mendekati 0. Proses
akan berulang kembali seperti Gambar 4 (Fausett 2014).
Pada proses pembelajaran menggunakan algoritma Levenberg – Marquardt atau yang biasa dikenal dengan Trainlm. Trainlm ini merupakan metode tercepat untuk pelatihan feedforward neuron yang berukuran sedang. Fungsi yang biasa digunakan pada jaringan multilayer adalah tansig dan purelin. Tansig merupakan fungsi yang baik untuk mengenali masalah dan purelin merupakan fungsi linear yang baik untuk menyelesaikan masalah. Bentuk dari fungsi tansig dan purelin seperti pada Gambar 5 (Hagan dan Menhaj 1994).
Gambar 5 Fungsi aktivasi Pengujian dan Evaluasi
Pengujian dilakukan dengan membandingkan data latih dan data uji yang sebelumnya sudah di tes kebenaranya pada laboratorium. Perhitungan akurasi dapat dilihat pada Persamaan 12.
Akurasi = ∑ 𝐽𝑢𝑚𝑙𝑎ℎ 𝑑𝑎𝑡𝑎 𝑢𝑗𝑖 𝑦𝑎𝑛𝑔 𝑑𝑖𝑝𝑟𝑒𝑑𝑒𝑘𝑠𝑖 𝑏𝑒𝑛𝑎𝑟
∑ 𝐽𝑢𝑚𝑙𝑎ℎ 𝑑𝑎𝑡𝑎 𝑢𝑗𝑖 𝑘𝑒𝑠𝑒𝑙𝑢𝑟𝑖ℎ𝑎𝑛 (12)
Evaluasi hasil pengujian dilihat dengan menghitung nilai data yang yang benar dengan semua data yang tersedia. Selain menggunakan akurasi, evaluasi dilakukan dengan cara RMSE.
RMSE adalah perhitungan evaluasi yang digunakan untuk mengukur akurasi hasil perkiraan suatu model (Walpole 1992). RMSE dapat dihitung seperti Persamaan 13.
7
𝑅𝑀𝑆𝐸 = √∑𝑛𝑖=1(𝑦̂ − 𝑦)2
𝑛 (13)
Dimana : 𝑦̂ = nilai prediksi, y = nilai aktual, n = jumlah data. Peralatan Penelitian
Perangkat lunak yang digunakan dalam penelitian ini adalah:
• Sistem operasi : Windows 10 Pro
• Bahasa pemrograman : MATLAB
• Antarmuka bahasa pemrograman : MATLAB
• Pengolahan Gambar : OpenCv
Perangkat keras yang digunakan dalam penelitian ini adalah komputer personal dengan spesifikasi:
• Prosesor : Intel Core i5- 5200U CPU @ 2.20 GHz • Memory : 8 GB
• System type : 64-bit operating system • VGA : NVDIA GeForce GT930M
HASIL DAN PEMBAHASAN
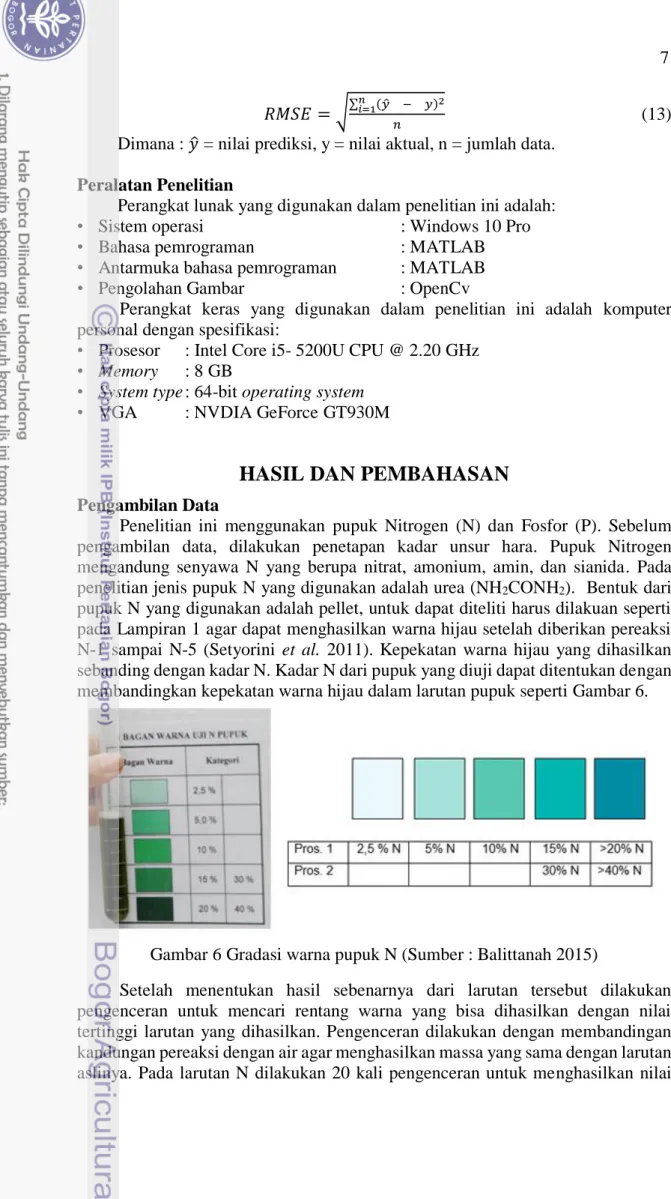
Pengambilan DataPenelitian ini menggunakan pupuk Nitrogen (N) dan Fosfor (P). Sebelum pengambilan data, dilakukan penetapan kadar unsur hara. Pupuk Nitrogen mengandung senyawa N yang berupa nitrat, amonium, amin, dan sianida. Pada penelitian jenis pupuk N yang digunakan adalah urea (NH2CONH2). Bentuk dari pupuk N yang digunakan adalah pellet, untuk dapat diteliti harus dilakuan seperti pada Lampiran 1 agar dapat menghasilkan warna hijau setelah diberikan pereaksi N-1 sampai N-5 (Setyorini et al. 2011). Kepekatan warna hijau yang dihasilkan sebanding dengan kadar N. Kadar N dari pupuk yang diuji dapat ditentukan dengan membandingkan kepekatan warna hijau dalam larutan pupuk seperti Gambar 6.
Gambar 6 Gradasi warna pupuk N (Sumber : Balittanah 2015)
Setelah menentukan hasil sebenarnya dari larutan tersebut dilakukan pengenceran untuk mencari rentang warna yang bisa dihasilkan dengan nilai tertinggi larutan yang dihasilkan. Pengenceran dilakukan dengan membandingan kandungan pereaksi dengan air agar menghasilkan massa yang sama dengan larutan aslinya. Pada larutan N dilakukan 20 kali pengenceran untuk menghasilkan nilai
8
1% hingga 20%. Untuk melakukan pengenceran dapat dilakukan dengan membandingkan massa air dengan massa pereaksi. Untuk larutan yang pengerjaanya seperti pada Lampiran 1 maka massa airnya 0 ml dan massa pereaksi 1 ml. Semakin sedikit volume pereaksi semakin rendah kadar yang dihasilkan.
Pada pengambilan larutan N harus memperhatikan waktu. Larutan yang sudah berubah warnanya harus segera diukur kepekataanya. Semakin lama mendiamkan larutan, lebih dari 30 menit warna larutan dapat berubah menjadi lebih gelap sehingga kadar larutan menjadi tidak akurat.
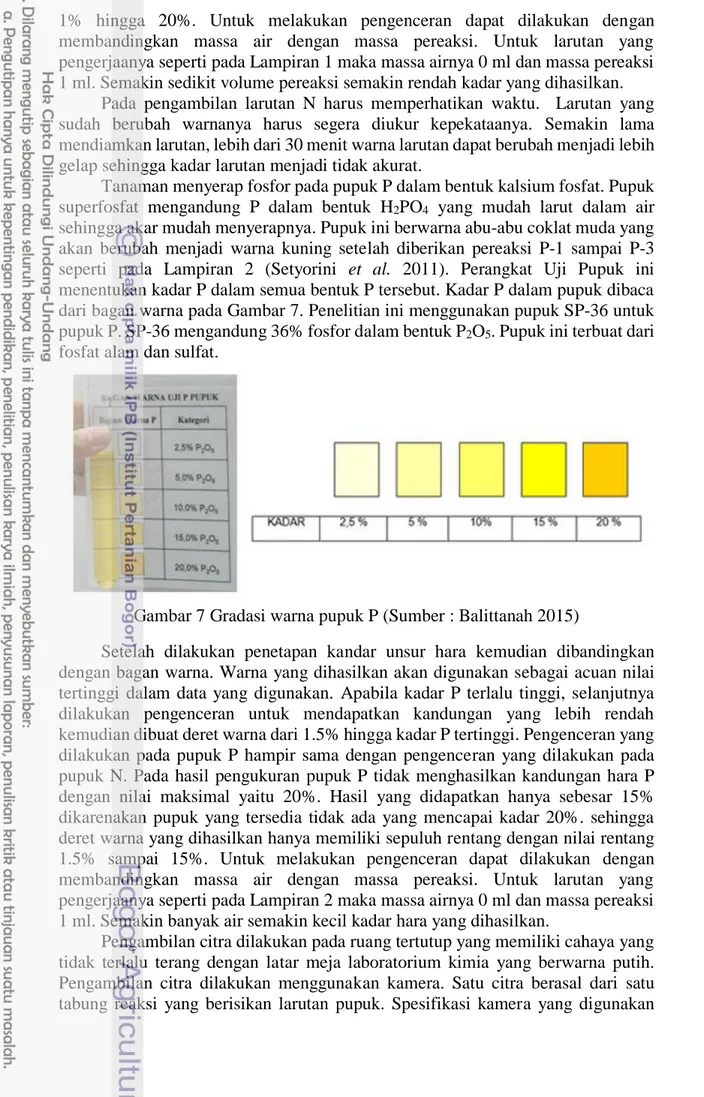
Tanaman menyerap fosfor pada pupuk P dalam bentuk kalsium fosfat. Pupuk superfosfat mengandung P dalam bentuk H2PO4 yang mudah larut dalam air sehingga akar mudah menyerapnya. Pupuk ini berwarna abu-abu coklat muda yang akan berubah menjadi warna kuning setelah diberikan pereaksi P-1 sampai P-3 seperti pada Lampiran 2 (Setyorini et al. 2011). Perangkat Uji Pupuk ini menentukan kadar P dalam semua bentuk P tersebut. Kadar P dalam pupuk dibaca dari bagan warna pada Gambar 7. Penelitian ini menggunakan pupuk SP-36 untuk pupuk P. SP-36 mengandung 36% fosfor dalam bentuk P2O5. Pupuk ini terbuat dari fosfat alam dan sulfat.
Gambar 7 Gradasi warna pupuk P (Sumber : Balittanah 2015)
Setelah dilakukan penetapan kandar unsur hara kemudian dibandingkan dengan bagan warna. Warna yang dihasilkan akan digunakan sebagai acuan nilai tertinggi dalam data yang digunakan. Apabila kadar P terlalu tinggi, selanjutnya dilakukan pengenceran untuk mendapatkan kandungan yang lebih rendah kemudian dibuat deret warna dari 1.5% hingga kadar P tertinggi. Pengenceran yang dilakukan pada pupuk P hampir sama dengan pengenceran yang dilakukan pada pupuk N. Pada hasil pengukuran pupuk P tidak menghasilkan kandungan hara P dengan nilai maksimal yaitu 20%. Hasil yang didapatkan hanya sebesar 15% dikarenakan pupuk yang tersedia tidak ada yang mencapai kadar 20%. sehingga deret warna yang dihasilkan hanya memiliki sepuluh rentang dengan nilai rentang 1.5% sampai 15%. Untuk melakukan pengenceran dapat dilakukan dengan membandingkan massa air dengan massa pereaksi. Untuk larutan yang pengerjaanya seperti pada Lampiran 2 maka massa airnya 0 ml dan massa pereaksi 1 ml. Semakin banyak air semakin kecil kadar hara yang dihasilkan.
Pengambilan citra dilakukan pada ruang tertutup yang memiliki cahaya yang tidak terlalu terang dengan latar meja laboratorium kimia yang berwarna putih. Pengambilan citra dilakukan menggunakan kamera. Satu citra berasal dari satu tabung reaksi yang berisikan larutan pupuk. Spesifikasi kamera yang digunakan
9 adalah kamera smartphone ASUS Z00AD tanpa menggunakan flash, jarak fokus lensa 3.78 mm, white balance auto, bukaan diafragma f/2.0, exposure time 1/60, ISO 200.
Data Penelitian
Penelitian ini menggunakan hasil Gambar dari laboratorium Balai Penelitian Tanah dan dokumen penelitian sebelumnya yaitu penelitian Fajri (2014). Jumlah citra yang digunakan berjumlah 400 citra ( 236 penelitian sebelumnya dan 137 data penelitian ini ) dengan format JPG. Citra terbagi atas 44 % data uji dan 56% data latih. Pembagian 176 data uji dan 224 data latih tidak mengacu pada rujukan manapun pembagian hanya berdasarkan pemetaan yang sudah dianggap mewakili citra setiap kelas yang ada.
Praproses
Praproses terdiri dari cropping dan resizing, ekstrasi fitur. Pada cropping dan
resizing diambil satu titik pada citra hasil akuisisi yang akan diambil menjadi citra
baru ukuran 50 x 50 piksel. Proses ini dilakukan untuk mengambil sampel dari warna dominan pada setiap citra dan menurunkan waktu komputasi pengolahan citra. Selanjutnya adalah proses ekstrasi fitur dengan mengambil nilai yang RGB yang dominan pada hasil citra seperti pada Gambar 8.
Gambar 8 Proses Praproses
Citra asli yang memiliki banyak noise berupa latar citra yang tidak diperlukan dalam proses perhitungan akan dibuang pada penelitian ini proses croping masih dilakukan secara manual. Citra yang sudah dibuang latarnya kemudian akan di potong dan perkecil ukurannya menjadi 50 x 50 pixel agar lebih mudah di proses. Setelah melakukan proses cropping dan resizing selanjutnya pengambilan nilai RGB untuk tahap selanjutnya.
Pengambilan nilai RGB dilakukan dengan kuatisasi warna dimana semua pixel pada Gambar dibaca nilainya kemudian dihitung warna apa yang sering muncul, pengambilan warna yang sering muncul menggunakan K-means clustering untuk menentukan satu nilai RGB yang sering muncul. Pada proses pengelompokan menggunakan K-means nilai centroid ditetapkan secara acak oleh sistem. Persamaan 1 lakukan berulang kali hingga dihasilkan nilai centroid yang tidak berubah. Nilai centroid terakhir dijadikan nilai dominan yang kemudian dibawa pada klasifikasi Neural Network pada tahap selanjutnya.
Pembuatan Model Klasifikasi
Penelitian ini menggunakan jaringan multilayer dimana bukan hanya antara lapisan input dan output yang libatkan, tetapi melibatkan lapisan yang tersembunyi yang memiliki suatu fungsi aktivasi. Jumlah kelas yang akan dibangun pada algoritme Neural Network Backprogation sebanyak lima kelas untuk pupuk N dan
10
lima kelas untuk pupuk N. Setiap kelas akan mempresentasikan kadar 2.5%, 5%, 10%, 15%, dan 20% seperti pada Gambar 6 Gradasi warna pupuk N (Sumber : Balittanah 2015) dan Gambar 7 Gradasi warna pupuk P (Sumber : Balittanah 2015). Setiap kelas tidak memiliki jumlah anggota yang sama. Pada proses pelatihan dilakukan beberapa kali percobaan. Arsitektur Neural Network Backprogation yang dibangun pada penelitian ini dijelaskan pada Tabel 1.
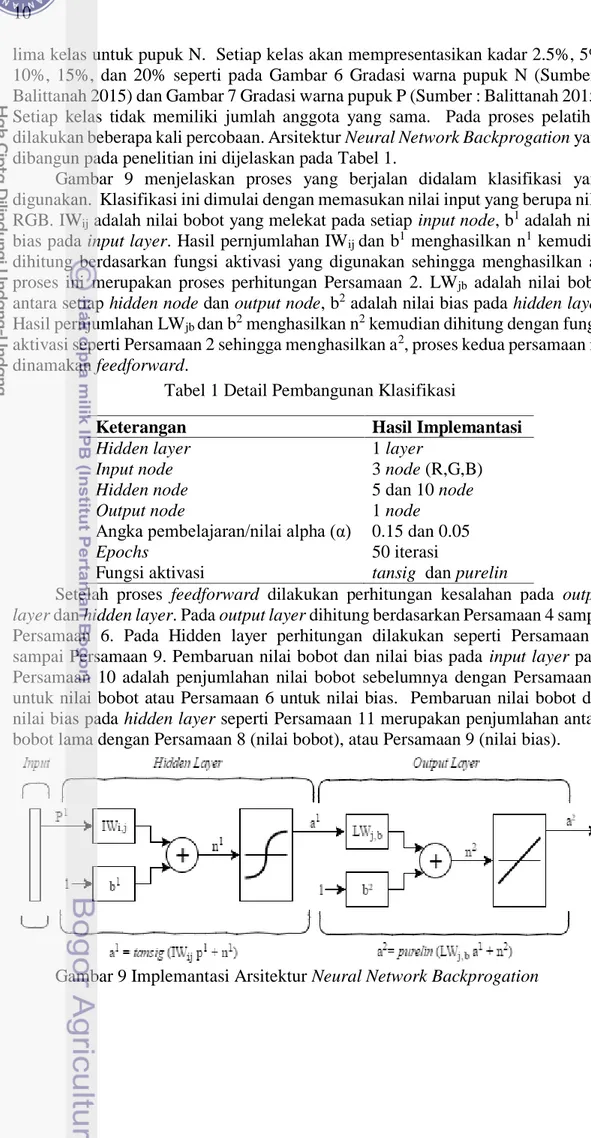
Gambar 9 menjelaskan proses yang berjalan didalam klasifikasi yang digunakan. Klasifikasi ini dimulai dengan memasukan nilai input yang berupa nilai RGB. IWij adalah nilai bobot yang melekat pada setiap input node, b1 adalah nilai bias pada input layer. Hasil pernjumlahan IWij dan b1 menghasilkan n1 kemudian dihitung berdasarkan fungsi aktivasi yang digunakan sehingga menghasilkan a1, proses ini merupakan proses perhitungan Persamaan 2. LWjb adalah nilai bobot antara setiap hidden node dan output node, b2 adalah nilai bias pada hidden layer. Hasil pernjumlahan LWjb dan b2 menghasilkan n2 kemudian dihitung dengan fungsi aktivasi seperti Persamaan 2 sehingga menghasilkan a2, proses kedua persamaan ini dinamakan feedforward.
Tabel 1 Detail Pembangunan Klasifikasi
Keterangan Hasil Implemantasi
Hidden layer 1 layer
Input node 3 node (R,G,B)
Hidden node 5 dan 10 node
Output node 1 node
Angka pembelajaran/nilai alpha (α) 0.15 dan 0.05
Epochs 50 iterasi
Fungsi aktivasi tansig dan purelin
Setelah proses feedforward dilakukan perhitungan kesalahan pada output
layer dan hidden layer. Pada output layer dihitung berdasarkan Persamaan 4 sampai
Persamaan 6. Pada Hidden layer perhitungan dilakukan seperti Persamaan 7 sampai Persamaan 9. Pembaruan nilai bobot dan nilai bias pada input layer pada Persamaan 10 adalah penjumlahan nilai bobot sebelumnya dengan Persamaan 5 untuk nilai bobot atau Persamaan 6 untuk nilai bias. Pembaruan nilai bobot dan nilai bias pada hidden layer seperti Persamaan 11 merupakan penjumlahan antara bobot lama dengan Persamaan 8 (nilai bobot), atau Persamaan 9 (nilai bias).
Gambar 9 Implemantasi Arsitektur Neural Network Backprogation
11 Perhitungan Akurasi
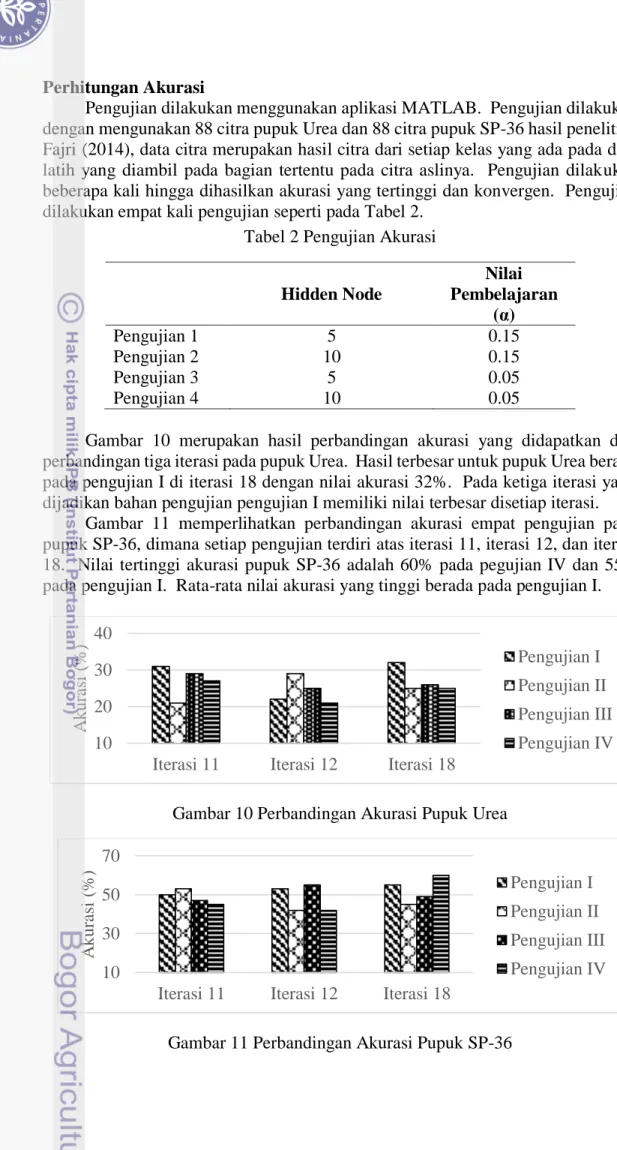
Pengujian dilakukan menggunakan aplikasi MATLAB. Pengujian dilakukan dengan mengunakan 88 citra pupuk Urea dan 88 citra pupuk SP-36 hasil penelitian Fajri (2014), data citra merupakan hasil citra dari setiap kelas yang ada pada data latih yang diambil pada bagian tertentu pada citra aslinya. Pengujian dilakukan beberapa kali hingga dihasilkan akurasi yang tertinggi dan konvergen. Pengujian dilakukan empat kali pengujian seperti pada Tabel 2.
Tabel 2 Pengujian Akurasi
Hidden Node Nilai Pembelajaran (α) Pengujian 1 5 0.15 Pengujian 2 10 0.15 Pengujian 3 5 0.05 Pengujian 4 10 0.05
Gambar 10 merupakan hasil perbandingan akurasi yang didapatkan dari perbandingan tiga iterasi pada pupuk Urea. Hasil terbesar untuk pupuk Urea berada pada pengujian I di iterasi 18 dengan nilai akurasi 32%. Pada ketiga iterasi yang dijadikan bahan pengujian pengujian I memiliki nilai terbesar disetiap iterasi.
Gambar 11 memperlihatkan perbandingan akurasi empat pengujian pada pupuk SP-36, dimana setiap pengujian terdiri atas iterasi 11, iterasi 12, dan iterasi 18. Nilai tertinggi akurasi pupuk SP-36 adalah 60% pada pegujian IV dan 55% pada pengujian I. Rata-rata nilai akurasi yang tinggi berada pada pengujian I.
Gambar 10 Perbandingan Akurasi Pupuk Urea
Gambar 11 Perbandingan Akurasi Pupuk SP-36 10
20 30 40
Iterasi 11 Iterasi 12 Iterasi 18
A kura si (%) Pengujian I Pengujian II Pengujian III Pengujian IV 10 30 50 70
Iterasi 11 Iterasi 12 Iterasi 18
A kura si (%) Pengujian I Pengujian II Pengujian III Pengujian IV
12
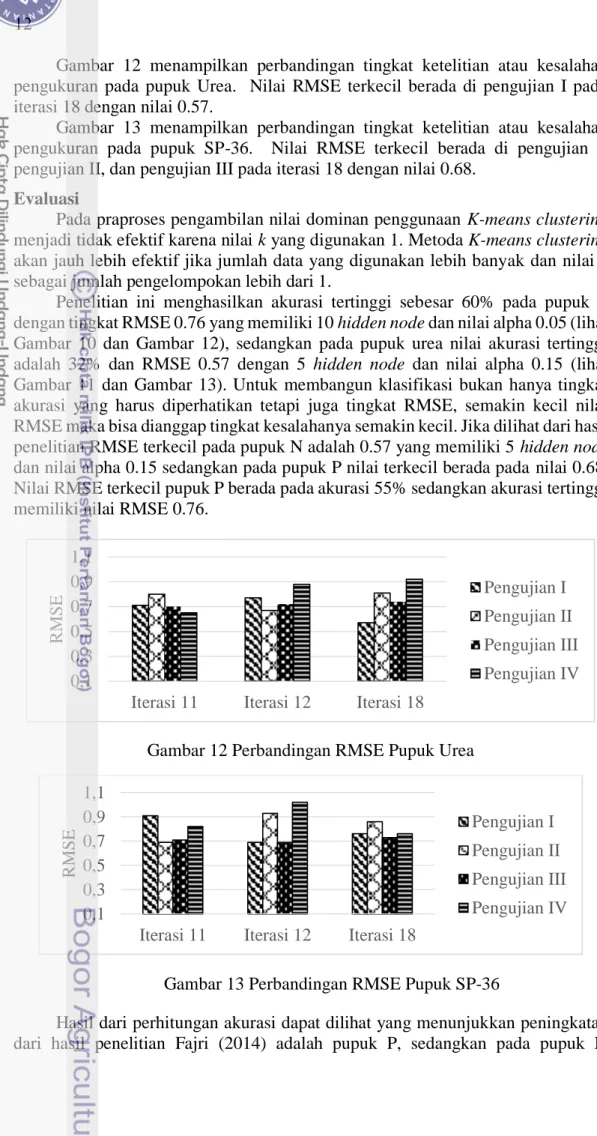
Gambar 12 menampilkan perbandingan tingkat ketelitian atau kesalahan pengukuran pada pupuk Urea. Nilai RMSE terkecil berada di pengujian I pada iterasi 18 dengan nilai 0.57.
Gambar 13 menampilkan perbandingan tingkat ketelitian atau kesalahan pengukuran pada pupuk SP-36. Nilai RMSE terkecil berada di pengujian I, pengujian II, dan pengujian III pada iterasi 18 dengan nilai 0.68.
Evaluasi
Pada praproses pengambilan nilai dominan penggunaan K-means clustering menjadi tidak efektif karena nilai k yang digunakan 1. Metoda K-means clustering akan jauh lebih efektif jika jumlah data yang digunakan lebih banyak dan nilai k sebagai jumlah pengelompokan lebih dari 1.
Penelitian ini menghasilkan akurasi tertinggi sebesar 60% pada pupuk P dengan tingkat RMSE 0.76 yang memiliki 10 hidden node dan nilai alpha 0.05 (lihat Gambar 10 dan Gambar 12), sedangkan pada pupuk urea nilai akurasi tertinggi adalah 32% dan RMSE 0.57 dengan 5 hidden node dan nilai alpha 0.15 (lihat Gambar 11 dan Gambar 13). Untuk membangun klasifikasi bukan hanya tingkat akurasi yang harus diperhatikan tetapi juga tingkat RMSE, semakin kecil nilai RMSE maka bisa dianggap tingkat kesalahanya semakin kecil. Jika dilihat dari hasil penelitian RMSE terkecil pada pupuk N adalah 0.57 yang memiliki 5 hidden node dan nilai alpha 0.15 sedangkan pada pupuk P nilai terkecil berada pada nilai 0.68. Nilai RMSE terkecil pupuk P berada pada akurasi 55% sedangkan akurasi tertinggi memiliki nilai RMSE 0.76.
Gambar 12 Perbandingan RMSE Pupuk Urea
Gambar 13 Perbandingan RMSE Pupuk SP-36
Hasil dari perhitungan akurasi dapat dilihat yang menunjukkan peningkatan dari hasil penelitian Fajri (2014) adalah pupuk P, sedangkan pada pupuk N
0,1 0,3 0,5 0,7 0,9 1,1
Iterasi 11 Iterasi 12 Iterasi 18
RM S E Pengujian I Pengujian II Pengujian III Pengujian IV 0,1 0,3 0,5 0,7 0,9 1,1
Iterasi 11 Iterasi 12 Iterasi 18
RM S E Pengujian I Pengujian II Pengujian III Pengujian IV
13 mengalami penurunan. Pada penelitian Fajri (2014) menghasilkan 70% untuk pupuk N dengan RMSE 3.32 dan 18.33% pada pupuk P dengan RMSE 5.79. perbedaan ini didasari oleh perbedaan metode klasifikasi yang digunakan, pencahayaan ketika pengambilan citra, dan kamera yang digunakan.
Metode yang digunakan Fajri (2014) dimana k-NN melakukan klasifikasi terhadap data berdasarkan data latih yang jaraknya dekat dengan data yang sedang diproses. Data latih diproyeksikan ke dalam k dimensi yang masing-masing merepresentasikan fitur dari data. Sedang Neural Network memetakan pola yang didapat dari input ke dalam pola pada output dan mengoptimasi permasalahan perhitungan yang mungkin terjadi kemudian melakukan prediksi terhadap data. Sensor kamera yang digunakan Fajri (2014) memiliki resolusi maksimum 5 mega piksel sedangkan pada penelitian ini menggunakan kamera dengan resolusi maksimum 13 megapixel.
SIMPULAN DAN SARAN
SimpulanPenelitian ini merupakan pengembangan dari penelitian sebelumnya Fajri (2014) dengan menggunakan pewarnaan RGB dan metode klasifikasi Neural Network backpropagation pada pupuk N dan pupuk P. Akurasi tertinggi 60% pada pupuk P dengan nilai RMSE 0.76 dan 32% pada pupuk Urea dengan nilai RMSE 0.57. Penelitian ini berhasil meningkatkan akurasi kadar pupuk P dibanding penelitian Fajri (2014) yang memiliki akurasi 18.33% menjadi 60%. Namun untuk pupuk N mengalami penurunan, sebelumnya akurasi sebesar 70% menjadi 32%. Penelitian ini mampu menurunkan tingkat kesalahan yang mungkin terjadi pada penelitian sebelumnya yang memiliki nilai RMSE lebih besar dari 3, sedangkan pada penelitian ini memiliki nilai RMSE kurang dari 1.
Saran
Penelitian ini mampu memperbaiki akurasi pengukuran pupuk P namun belum mampu memperbaikin akurasi pupuk N dikarenakan data latih yang digunakan masih terlalu sedikit sebanyak 136 pupuk P dan 88 pupuk N. Untuk memperbaiki tingkat akurasi sebaiknya menggunakan data yang lebih banyak dan lebih teliti dalam pembuatan larutan.
DAFTAR PUSTAKA
Balittanah. 2014. Identifikasi Mutu Pupuk Secara Cepat dan Cara Penggunaan Perangkat Uji Pupuk. Balai Penelitian Tanah.
Fajri Y. 2014. Pemanfaatan Rasberry PI sebagai Alat Uji Kadar Nitrogen dan Fosfor pada Pupuk [skripsi]. Bogor (ID): Institut Pertanian Bogor.
Fausett L. 1994. Fundamental of Neural Network: Architecture, Algorithms, and
Application. New Jersey (US): Prentice-Hall.
Fenrizal RM. 2014. Aplikasi Perangkat Uji Pupuk Berbasis Android Menggunakan Fitur Warna [skripsi]. Bogor (ID): Institut Pertanian Bogor.
14
Hagan MT, and Menhaj MB. 1994. Training feed-forward networks with the
Marquardt algorithm .IEEE Transactions on Neural Networks. 5(6): 989–993.
doi : 10.1109/72.329697
Maulana RA. 2016. Pengembangan Perangkat Uji Pupuk Menggunakan Sensor Warna Berbasis Raspberry PI dengan Klasifikasi Support Vector
Machine[skripsi]. Bogor (ID): Institut Pertanian Bogor.
Rojas R. 1996. Neural Networks: A Systematic Introduction . Berlin (DE): Springer. Setyorini D, Sulaeman, Kasno A. 2011. Perangkat Uji Pupuk. Bogor (ID): Balai
Penelitian Tanah.
Wagstaff K, Cardie C,Rogers S, Schroedl S. 2001. Constrained K-means Clustering
with Background Knowledge. Proceedings of the Eighteenth International Conference on Machine Learning [Internet]. [waktu dan tempat pertemuan tidak
diketahui]. Bogor (ID) : IPB. hlm 577–584; [diunduh 2017 Mei 6]. Tersedia pada: http://www.cs.cmu.edu/~dgovinda/pdf/icml-2001.pdf
15 Lampiran 1 Penetapan kadar pupuk N
Cara Penetapan kadar untuk Pupuk N dengan PUP pada penelitian ini yaitu : 1 Pembuatan ekstrak pupuk: contoh pupuk sebanyak satu sendok takar kecil (0.25
g) dimasukkan ke dalam tabung sentrifusi volume 50 ml, menambahkan 2.5 ml pereaksi N-1, kocok perlahan-lahan. Diamkan 10 menit, kemudian volumenya dijadikan 50 ml dengan ditambah air (dapat digunakan air minum dalam kemasan), kemudian dikocok sampai homogen. Saring bila diperlukan untuk mendapatkan ekstrak jernih. Pengukuran pupuk urea gunakan prosedur 1, dan pupuk lainnya gunakan prosedur 2.
2 Prosedur 1: ke dalam tabung reaksi masukkan 1.0 ml ekstrak jernih pupuk (No.1) Prosedur 2: ke dalam tabung reaksi masukkan 0.5 ml ekstrak jernih pupuk (No. 1).
3 Tambahkan 4.5 ml air, selanjutnya dikocok, lalu tambahkan 1 ml pereaksi N-2. 4 Tambahkan 1 ml pereaksi N-3 dengan pipet tetes, kocok, tambahkan 0.05 g
pereaksi N-4 dengan menggunakan spatula, dikocok. Reaksi dibiarkan berlangsung sekitar 25-30 menit, sambil menunggu dikocok 3-4 kali diantara waktu tersebut.
5 Bila sudah tidak keluar gelembung-gelembung atau ekstrak menjadi jernih (bila perlu disaring), tambahkan 1 ml N-5 dengan pipet tetes. Biarkan 6-10 menit, warna biru kehijauan yang timbul dibandingkan dengan warna pada tabel gradasi warna (Gambar 4), kadar N didalam pupuk diperoleh dari gradasi warna yang sesuai dengan warna yang dihasilkan oleh contoh pupuk.
Lampiran 2 Penetapan kadar pupuk P
Cara penentuan pada pupuk fosfor sedikit berbeda. Pada pupuk fosfor dilakukan dengan cara, yaitu :
1 Dengan menggunakan sendok takar kecil masukkan 0.25 g contoh pupuk yang telah dihaluskan ke dalam tabung sentrifusi volume 50 ml.
2 Tambahkan pereaksi P-1 sampai volume 5 ml, dikocok sampai larut, bila ada gas CO2 (buih) biarkan sampai habis gelembungnya.
3 Tambahkan air (dapat digunakan air minum dalam kemasan), hingga volume menjadi 50 ml, tutup dan dikocok dengan cara bolak-balik sampai homogen, biarkan larutan menjadi jernih (ekstrak), saring bila diperlukan.
4 Ke dalam tabung reaksi 15 ml campurkan 5 ml pereaksi 2 dan 5 ml peraksi P-3, dikocok smpai homogen.
5 Masukkan 0.5 ml ekstrak jernih (No. 3) ke dalam tabung yang berisi campuran pereaksi P-2 dan P-3, tutup dan dikocok sampai homogen.
6 Setelah 2-5 menit, bandingkan warna kuning yang muncul dari larutan jernih permukaan pupuk dengan warna pada tabel gradasi warna (Gambar 5).
16
RIWAYAT HIDUP
Penulis dilahirkan di Bogor pada tanggal 15 Juli 1992. Penulis merupakan putri tunggal dari ayah Yudha Prasetya dan ibu Iis Sri Mulyati. Tahun 2010 penulis menyelesaikan pendidikan dari SMAN 3 Depok dan pada tahun yang sama penulis melanjutkan pendidikan pada program D3, program studi Teknik Komputer di Institut Pertanian Bogor. Penulis lulus dari Institut Pertanian Bogor pada tahun 2013. Pada tahun 2013, penulis lulus seleksi masuk program Sarjana Alih Jenis, Departemen Ilmu Komputer, Fakultas Matematika dan Ilmu Pengetahuan Alam, Institut Pertanian Bogor.