1
BAB I
PENDAHULUAN
I.1. Latar BelakangSUTET (Saluran Udara Tegangan Ekstra Tinggi) yang berfungsi untuk menyalurkan tegangan listrik dari pusat tegangan yang memiliki jarak yang jauh. Menara SUTET terbuat dari bahan rangkaian baja yang sangat rumit. Baja merupakan komponen penting dalam konstruksi menara SUTET. Baja yang digunakan dalam konstruksi menara SUTET juga memiliki kapasitas beban setiap saluran.
Pemantauan dan pengelolaan tidak dapat dilakukan dengan menyentuh objek secara langsung. Secara tradisional, konstruksi menara SUTET disurvei dengan peralatan dan metode konvensional. Proses tersebut memerlukan alat dan tenaga kerja yang memiliki keahlian khusus serta waktu yang sangat lama. Konsekuensinya, pekerjaan yang diselesaikan dengan metode konvensional tersebut menyangkut keselamatan para tenaga kerja dan biaya yang sangat besar. Selain hal tersebut, efisiensi menjadi sesuatu yang tidak mudah dicapai.
Perkembangan teknologi pemetaan berkembang sangat pesat, khususnya pada bidang Geodesi. Beberapa tahun terakhir ini perkembangan teknologi pemetaan terestris sudah digunakan untuk memetakan rangkaian, yaitu berupa saluran pipa dan besi yang sangat rumit. Salah satu teknologi yang berkembang tersebut adalah Terrestrial Laser Scanner (TLS), yaitu teknik penentuan posisi dan dimensi suatu objek dalam ruang 3D. Disebut Terrestrial karena menggunakan alat yang berada di atas permukaan bumi. TLS memancarkan sinar laser untuk memindai permukaan suatu objek dengan mengarahkan laser pada objek yang diinginkan. Akuisisi data dengan TLS menghasilkan data berupa data pointclouds disetiap scan world (SW), yang kemudian dilakukan tahapan registrasi terlebih dahulu untuk menghasilkan data pointclouds yang utuh sebelum memasuki tahap pemodelan 3D.
Pembuatan model objek dengan menggunakan TLS terdiri dari beberapa tahapan, yaitu tahap perencanaan, tahap pengambilan data, tahap registrasi, dan tahap pemodelan 3D. Tahap registrasi adalah tahap yang paling menentukan diantara tahap-tahap yang lainnya. Tahap registrasi adalah tahap-tahap penggabungan hasil data laser
2 scanner dari beberapa alat menjadi satu data pointclouds yang sudah menjadi satu yaitu dalam model 3D. Tahapan registrasi dapat menentukan tempat berdiri alat dan metode pengambilan data.
Data pointclouds dari tahapan registrasi harus memiliki ketelitian yang bagus agar data pointclouds dari setiap SW yang tergabung menghasilkan data pointclouds teregistrasi dengan sempurna. Registrasi data TLS terdiri dari beberapa metode, yaitu metode target to target, metode clouds to clouds, dan metode kombinasi. Selain ketiga metode registrasi diatas, terdapat juga metode pengukuran yang juga disebut sebagai metode registrasi, yaitu metode traverse.
Metode traverse adalah metode pengukuran dan merupakan metode registrasi langsung di lapangan. Metode traverse memutuhkan titik backsight sebagai acuan dalam melakukan registrasi di lapangan. Metode tersebut merupakan metode pengukuran dengan menggunakan TLS yang efektif dan efisien, karena sudah terikat langsung dengan koordinat tanah yang dihasilkan dari pengukuran GPS Geodetik, sehingga saat pengolahan data pointclouds pada software sudah teregistrasi. Metode traverse juga memiliki keunggulan monumentasi lemah dalam tingkat ketelitian hasil registrasi. Kesimpulannya adalah metode traverse perlu dikaji dalam proses pengambilan data dan perencanaan di lapangan yang efektif dan efisien, serta menghasilkan nilai ketelitian registrasi yang baik.
I.2. Cakupan Kegiatan
Pada kegiatan ini, cakupan kegiatan yang digunakan meliputi: 1. Pengukuran data lapangan menggunakan TLS Leica C10.
2. Pengukuran menggunakan metode traverse.
3. Registrasi data scan world menggunakan registrasi metode traverse (poligon). 4. Pengolahan data pointclouds dengan menggunakan software cyclone.
3 I.3. Tujuan Kegiatan
Kegiatan ini bertujuan untuk mengetahui keefektifan dalam pengambilan data dengan metode traverse yang teregistrasi secara langsung serta kualitas data pointclouds yang dihasilkan untuk dilakukannya proses pemodelan 3D.
I.4. Manfaat
Manfaat dari kegiatan ini untuk memberikan gambaran kinerja TLS dalam membangun model 3D dan untuk berikutnya dapat dipertimbangkan penggunaan metode traverse yang teregistrasi secara langsung dalam pengambilan data di lapangan yang efektif dan efisien.
I.5. Landasan Teori
Pemahaman mengenai konsep teori dan konsep pengukuran perlu dilakukan sebagai dasar pemikiran untuk melakukan pengukuran dengan menggunakan TLS. Berikut adalah penjelasan mengenai konsep teori dan konsep pengukuran menggunakan TLS.
I.5.1. Terrestrial Laser Scanner (TLS)
TLS adalah suatu peralatan yang memanfaatkan aplikasi sinar laser yang digunakan untuk penyiaman kenampakan suatu objek dengan memanfaatkan sensor aktif. Light Amplification by Simulated Emission of Radiation (Laser) merupakan mekanisme alat yang memancarkan radiasi gelombang Elektromagnetik. Pada umumnya laser tidak dapat dilihat oleh mata normal, melalui proses pancaran testimulasi. Sensor aktif memberikan keuntungan terhadap kondisi pencahayaan yang mungkin berbeda di setiap lokasi pengukuran yang berbeda (Yogiswara, 2014).
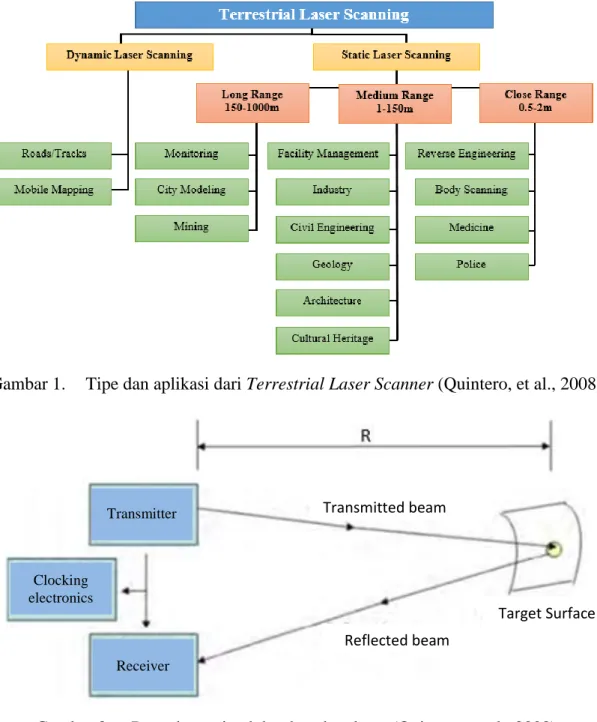
Tipe TLS terdiri dari dua bagian seperti terlihat pada Gambar 1. Secara garis besar tipe TLS terdiri dari dynamic laser scanner dan static laser scanner. Dimana static laser scanner memiliki ketelitian dan kepadatan titik yang lebih baik dari pada dynamic laser scanner. Perekaman dynamic laser scanner membutuhkan alat pendukung untuk pendefinisian posisi 3D suatu pointclouds, misalnya Inertia
4 Measurment Unit (IMU) dan GPS, sehingga membutuhkan biaya yang sangat tinggi untuk perekaman dengan TLS pada tipe dynamic laser scanner.
Gambar 1. Tipe dan aplikasi dari Terrestrial Laser Scanner (Quintero, et al., 2008)
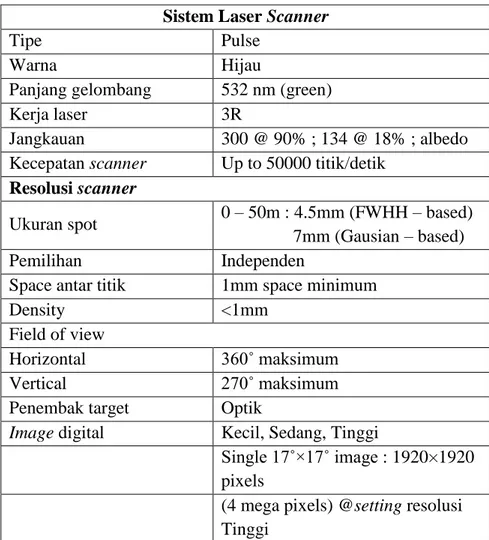
Gambar 2. Pengukuran jarak berdasarkan laser (Quintero, et al., 2008)
𝑅 = (𝐶 × ∆𝑇) 2⁄ ...(I.1) Dimana:
R : Jarak scanner dari objek.
C : Kecepatan gelombang sinar laser (3 x 108 m/s).
Transmitter Clocking electronics Receiver Transmitted beam Reflected beam Target Surface
5 ΔT : Beda waktu gelombang sinar laser pergi dan kembali.
Prinsip perekaman data dengan laser scanner adalah mentransmisikan sinar gelombang laser sampai mengenai objek yang akan diukur kemudian objek tersebut memantulkan kembali gelombang sinar laser ke sistem penerima (Kholiq, 2006). Pancaran sinar laser akan menimbulkan perbedaan waktu saat sinar laser mengenai objek dan kembali lagi ke sistem penerima. Perbedaan waktu tersebut yang akan digunakan untuk menentukan jarak ukuran antara scan head dari objek. Perhitungan jarak ukuran antara scan head dari objek didapat dari persamaan I.1. Ilustrasi dapat dilihat pada Gambar 2.
Gambar 3. Prinsip perekaman data dengan scanner (Soeta’at, 2005).
Prinsip perekaman data dengan scanner pada bidang X dan Y yang dijadikan reference plane dalam koordinat scan dapat dilihat pada Gambar 3. Dalam perekaman data, data yang direkam adalah sudut horisotal (α), sudut vertical (β), dan jarak atara pusat scanner dengan objek. Laser bergerak sesuai dengan perputaran arah jarum jam (Wicaksono, 2006).
Dari hasil perekaman data yang diperoleh, maka dapat ditentukan koordinat 3D dengan persamaan sebagi berikut:
X = R .cos β.sin α ………...(I.2)
Y = R .cos β.cos α ………...(I.3)
Z = R .sin β ………...(I.4)
6 R : Jarak dari scanner ke titik objek.
α : Sudut horizontal titik objek.
β : Sudut vertikal objek.
X,Y,Z : Koordinat titik data pointclouds.
Secara garis besar prinsip perekaman data pada alat TLS sampai didapatkan koordinat pointcloud, dapat dilihat pada Gambar 3.
I.5.2. Spesifikasi TLS Leica C10
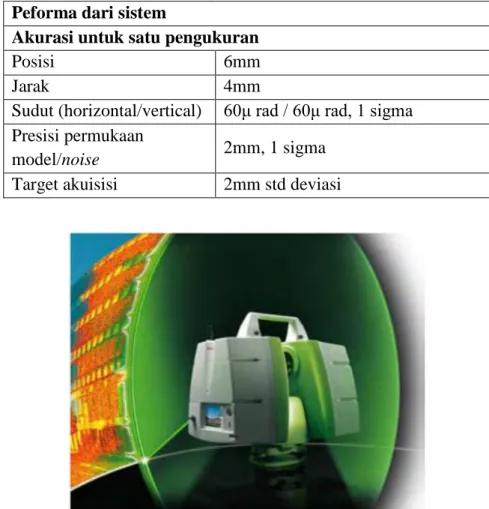
Dalam kegiatan ini, peneliti menggunakan alat TLS Leica C10. Spesifikasi dari alat TLS Leica C10 dapat dilihat pada Tabel 1. Gambar TLS Leica C10 dapat dilihat pada Gambar 4.
Tabel 1. Spesifikasi TLSLeica C10 (sumber: www.leica-geosystems.com/hds)
Sistem Laser Scanner
Tipe Pulse
Warna Hijau
Panjang gelombang 532 nm (green)
Kerja laser 3R
Jangkauan 300 @ 90% ; 134 @ 18% ; albedo
Kecepatan scanner Up to 50000 titik/detik
Resolusi scanner
Ukuran spot 0 – 50m : 4.5mm (FWHH – based)
7mm (Gausian – based)
Pemilihan Independen
Space antar titik 1mm space minimum
Density <1mm
Field of view
Horizontal 360˚ maksimum
Vertical 270˚ maksimum
Penembak target Optik
Image digital Kecil, Sedang, Tinggi
Single 17˚×17˚ image : 1920×1920 pixels
(4 mega pixels) @setting resolusi Tinggi
7 Lanjutan Tabel 1
Peforma dari sistem
Akurasi untuk satu pengukuran
Posisi 6mm
Jarak 4mm
Sudut (horizontal/vertical) 60μ rad / 60μ rad, 1 sigma Presisi permukaan
model/noise 2mm, 1 sigma
Target akuisisi 2mm std deviasi
Gambar 4. Gambar TLS Leica C10 (sumber: www.leica-geosystems.com/hds). Survei dengan menggunakan TLS ini memiliki beberapa tahapan, yaitu meliputi tahap survei lokasi, tahap perencanaan, tahap pengambilan data, tahap registrasi, tahap georeferensi, dan tahap pemodelan 3D. Tahap registrasi adalah tahapan yang menentukan untuk mendapatkan data pointclouds yang utuh (Sulaiman, 2012).
I.5.3. Registrasi
Pada proses penyiaman menara SUTET dengan metode traverse, maka tidak dibutuhkan bagian sisi yang bertampalan. Hal ini dikarenakan pada metode traverse sudah langsung didapatkan data pointclouds yang sudah teregistrasi, sehingga proses di studio hanya untuk pemodelan dan menghilangkan noise. Data pointclouds dari hasil penyiaman metode traverse dengan TLS sudah teregistrasi karena menggunakan
8 titik backsight sebagai referensi berdiri alat selanjutnya. Titik backsight tersebut sudah memiliki nilai koordinat dengan sistem koordinat yang sama.
Registrasi merupakan proses penggabungan beberapa data hasil penyiaman atau SW kedalam sistem koordinat yang sama. Penggabungan tersebut dengan melakukan transformasi koordinat 3D antara SW satu dengan SW yang lainnya. Parameter yang digunakan untuk melakukan transformasi koordinat didapatkan dari data konstrain agar ada kesamaan antar SW. Data konstrain merupakan titik referensi yang tetap antara dua penyiaman atau SW dan memiliki bentuk Geometri tertentu. Registrasi dapat di bedakan menjadi tiga metode berdasarkan data konstrain di atas (Reddington, 2005). Ketiga metode tersebut yaitu:
1. Metode target to target.
Metode yang pada dasarnya menggabungkan beberapa data hasil SW dengan menggunakan target sebagai acuannya. Target tersebut memiliki beberapa jenis, diantaranya planar dan sphere. Untuk menggabungkan beberapa data SW, terlebih dahulu menentukan koordinat pusat atau koordinat konstrain dari target yang sejenis dan terekam pada data SW yang akan digabungkan.
Gambar 5. Ilustrasi metode target to target registration (Pfeifer, 2007) Konsep metode target to target membutuhkan minimal 3 target yang tersebar merata untuk memecahkan 6 parameter orientasi luar (roll, pitch, yaw, translasi x, translasi y, translasi z) laser scanner dari satu berdiri alat.
2. Metode cloud to cloud.
Metode ini pada dasarnya menggabungkan beberapa data hasil SW dengan menentukan pointcloud yang sama dan terekam pada data SW yang akan digabungkan. Untuk menentukan pointcloud agar mudah diidentifikasi yaitu
9 dengan menggunakan pojok-pojok bangunan, ujung-ujung menara, dan sebagainya. Penggunaan metode tersebut menjadikan hasil pekerjaan di lapangan lebih efisien, karena registrasi dilakukan di studio, selain itu proses registrasi dapat dilakukan secara berulang-ulang untuk mendapatkan ketelitian yang diinginkan.
Gambar 6. Ilustrasi ICP (Interactive Cloud Registration) (Pfeifer, 2007) Ilustrasi yang dijelaskan pada Gambar 6 dapat menjelaskan konsep yang digunakan metode cloud to cloud. Maksud dari konsep tersebut adalah mencari offset atau jarak terdekat secara berulang-ulang dari kedua titik yang saling berdekatan antara kedua SW.
3. Metode kombinasi.
Metode yang pada dasarnya merupakan gabungan dari metode target to target dan cloud to cloud dalam satu pekerjaan. Dimana konstrain yang digunakan adalah penerapan target konstrain dan cloud constraint. Untuk menggunakan metode ini perlu perencanaan antar SW mana yang akan menggunakan target konstrain atau cloud constraint.
Selain ketiga metode registrasi di atas, terdapat metode pengukuran yang sekaligus merupakan metode registrasi secara langsung yang dilakukan di lapangan, yaitu metode traverse.
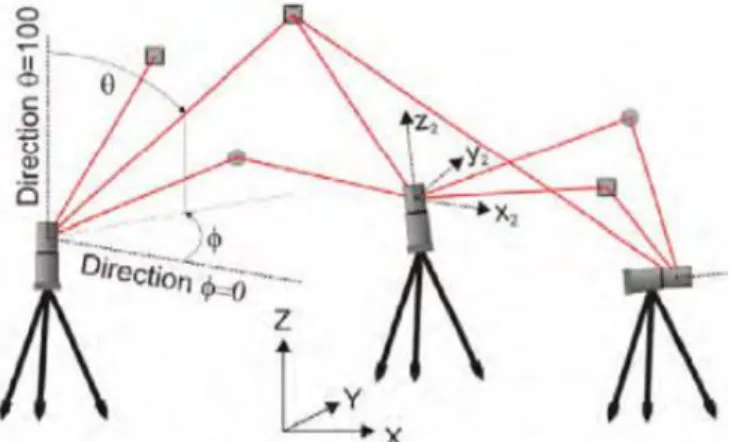
I.5.4. Metode Traverse
Metode traverse adalah metode poligon. Metode poligon yang digunakan dalam metode ini adalah metode poligon tertutup. Polygon tertutup merupakan poligon dengan koordinat awal dan akhir yang mempunyai koordinat sama. Metode poligon tertutup ini membutuhkan titik acuan dalam setiap kali berdiri alat.
10 Gambar 7. Ilustrasi metode traverse registration (sumber: leica-geosystems.com) Gambar 7 menjelaskan mengenai ilustrasi pengukuran menggunakan metode traverse. Metode traverse atau yang dikenal dengan metode poligon membutuhkan titik acuan dalam setiap pengukuran. Titik acuan yang dimaksudkan adalah titik acuan yang berada di belakang atau backsight, titik acuan yang berada di depan atau forsight, dan titik acuan berdiri alat. Pada pengukuran TLS di lapangan metode traverse ini merupakan metode poligon (Sulaiman, 2012).
Tahapan survei lapangan dengan metode traverse adalah sebagi berikut: 1. target didirikan di titik yang sudah memiliki referensi.
2. alat didirikan di titik berikutnya yang sudah tereferensi, untuk memulai scanning, dilakukan dengan scanning target di titik referensi dan mulai proses scanning untuk n.
3. alat dipindahkan di n+1 dan target berada di n. Setelah itu proses scanning dapat dimulai.
4. mengulangi langkah 2 s.d 3 sampai membentuk poligon tertutup.
I.5.5. Cyclone
Cyclone merupakan perangkat lunak yang dikembangkan oleh cyra untuk membuat operasional lebih efisien pada semua sistem penyiaman HDS dari Leica (Wibowo, 2013). Secara singkat perangkat lunak cyclone memiliki tiga fungsi utama, yaitu:
1. Mengoperasikan scanner, sehingga dapat dilakukan penyiaman data objek. 2. Mengolah data penyiaman.
11 Manual pemrosesan data dengan software cyclone yang disusun oleh technical support 3D Laser scanner division PT. ALMEGA GEOSYSTEMS. Terdapat beberapa istilah dalam software cyclone yang perlu diketahui, yaitu:
1. Database : merupakan tempat penyimpanan data cyclone. Satu
database dapat digunakan untuk menyimpan lebih dari satu project.
2. Project : merupakan data tiap job/pekerjaan yang disimpan di dalam database.
3. Station : merupakan salah satu file dalam project yang merupakan tempat berdiri alat pada saat pengambilan data.
4. Scan world : file dalam folder station yang berisi data scan tiap sekali dalam pengambilan data, sehingga dalam satu station bisa terdapat lebih dari satu SW.
5. Control Space : folder di dalam SW yang berisi informasi titik ikat atau target yang ada dalam data scan.
6. Model Spaces : folder dalam SW yang berisi data tampilan hasil scan. Di dalam model spaces ada model space view yang merupakan file data tampilan.
7. Scan : berisi data asli hasil scanning.
8. Images : berisi data Gambar hasil pengambilan foto dilapangan oleh scanner.
9. Registrations : penggabungan data antara beberapa data/SW yang diambil dari beberapa posisi berdiri alat. Dalam istilah umum biasa disebut rektifikasi/Georeferensi data.
10. Point Cloud : istilah untuk menyebut data point hasil scanning, disebut data pointclouds karena jumlah point-nya yang sangat banyak (jutaan point).
11. Target : titik yang digunakan sebagai titik ikat untuk penggabungan/registrasi antar SW.
12 I.5.6. Pemodelan 3D
Pemodelan adalah membuat bentuk suatu objek atau benda-benda, membuat dan mendesain objek tersebut sehingga terlihat seperti nyata yaitu sesuai dengan objek dan basisnya dimana secara keseluruhan dikerjakan menggunakan komputer. Melalui proses desain dan konsep untuk mendesainnya, keseluruhan objek bisa diperlihatkan secara 3D, sehingga hasil dalam membuat dan mendesain objek atau benda-benda sampai terlihat seperti nyata di media komputer biasa disebut pemodelan 3D.
Ada beberapa aspek yang harus dipertimbangkan dalam pemodelan objek menjadi bentuk 3D, yang nantinya akan mempengaruhi pada kualitas hasil akhir. Aspek-aspek tersebut meliputi metode untuk mendapatkan data yang mendeskripsikan objek, tujuan dari model, tingkat kerumitan, perhitungan biaya, kesesuaian dan kenyamanan, serta kemudahan memanipulasi model. Proses pemodelan 3D membutuhkan perancangan yang dibagi menjadi beberapa tahapan untuk pembentukanny, yaitu meliputi apa objek yang akan dijadikan objek dasar, metode pemodelan objek 3D, pencahayaan dan animasi objek sesuai dengan proses yang dilakukan (Yogiswara, 2014).
I.5.7. Kontrol kualitas data
Kontrol kualitas data merupakan salah satu proses dimana suatu produk hasil dibandingkan dengan spesifikasi dan persyaratan tertentu untuk menentukan tindakan selanjutnya jika terjadi perbedaan antara produk hasil dengan produk yang sebenarnya. Menurut Purnomo (2004), proses dari kontrol kualitas data meliputi dua aspek kegiatan, yaitu :
1. Pengamatan terhadap bentuk peformasi bentuk.
Pengamatan ini dilakukan untuk mengetahui kelemahan dan kelebihan dari masing-masing produk dengan cara membandingkan, minimal dua buah obyek atau bentuk yang salah satunya dianggap mendekati kebenaran. Dua buah obyek yang digunakan bertujuan untuk mengamati bentuk peformasi yang salah satunya disepakati kebenarannya.
13 Membandingkan juga bertujuan untuk membedakan dua obyek atau bentuk yang salah satunya sudah disepakati kebenarannya yang akan dijadikan standar atau dasar dalam perbandingan.
Kontrol kualitas data juga dilakukan dengan cara melakukan pengukuran lapangan secara langsung yang akan dijadikan sebagai data yang dianggap benar untuk menguji hasil produk maupun hasil registrasi pada kegiatan ini.