Abstrak—Pemetaan otomatis pada mobile robot merupakan kemampuan mobile robot yang dapat memetakan posisi mobile robot pada saat mobile robot bergerak di suatu ruangan. Hasil dari pemetaan otomatis pada mobile robot ini adalah peta dua dimensi yang menggambarkan pergerakan mobile robot pada ruanagn yang telah dilewati. Peta dua dimensi ini digunakan mobile robot untuk penunjuk arah sehingga robot dapat bergerak secara otomatis sesuai jalur yang ada pada peta. Dan peta dua dimensi ini dapat digunakan untuk mengetahui bentuk ruangan yang telah dilewati robot. Untuk mencari jalur pada peta digunakan metode disjktra agar dapat memperoleh jalur yang memiliki jarak terpendek. Pada Tugas Akhir ini, dibuat robot dengan menggunakan 3 buah roda omni yang masing-masing roda terpasang motor DC. Pada bagian tengah robot terdapat sistem sensor rotari encoder untuk mengetahui posisi robot dalam kordinat kartesian. Dan dibagian atas robot terdapat sensor kinect untuk menghitung jarak obyek disekitar robot. Kemudian untuk membuat peta, robot dikontrol secara manual untuk menelusuri ruangan. Dengan hasil peta yang telah dibuat, dengan menggunakan metode disjktra akan diperoleh jalur dengan jarak terpendek yang menghubungkan titik start dengan titik tujuan, kemudian jalur ini digunakan robot untuk penunjuk arah agar robot dapat bergerak secara otomatis menuju titik target.
Pengujian pada Tugas Akhir ini menunjukan bahwa sistem sensor rotari encoder mampu memetakan posisi robot dalam satuan centimeter dengan error sebesar 29,89% pada arah X dan error 30,45% pada arah Y sedangkan sudut orientasi sistem sensor rotari encoder memiliki nilai persentase error sebesar 5,05%. Pada pengukuran jarak menggunakan sensor kinect dapat meleakukan pengukuran dengan ketelitian milimeter dengan error sebesar 4,3%. Kemudian pada sistem tracking otomatis untuk mencapai titik target sistem tracking mempunyai nilai error sebesar 23,65% pada posisi X dan mempunyai nilai error sebesar 16,96% pada posisi Y.
Kata Kunci— Peta dua dimensi, kinect, rotari encoder, mobile robot
I. PENDAHULUAN
Teknologi robot semakin berkembang. Pada negeara-negara maju teknologi robot menjadi salah satu teknologi yang terus direset. Salah satu negara maju yang mengembangkan teknologi robot, diantaranya Jepang dengan salah satu product robotnya adalah Asimo(advanced step in innovative mobility) yang diperkenalkan pertamakali oleh honda pada tahun 2000. Asimo didesain dapat beradaptasi di dunia nyata dan mampu berjalan dengan kedua kakinya, SOINN(Self-Organizing
Incremental Neural Network) adalah robot pintar yang sedang dikembangkan oleh Tokyo Institute Of Technology. SOINN merupakan robot pintar yang dapat berpikir dengan sendirinya. Kemudian negara berkembang yang melakukan riset dan mengembangkan teknologi robot adalah China dengan salah satu product robotnya Rover Yutu(“Jade Rabbit”) merupakan robot yang betugas untuk mengeksplorasi keadaan bulan. Oleh karena itu, Indonesia sebagai negara berkembang perlu melakukan riset dan mengembangkan teknologi robot agar indonesia tidak ketinggalan dengan negara-negara lain pengembang teknologi robot. Dengan keaktifan Indonesia dalam riset dan pengembangan teknologi robot diharapkan dapat tercipta robot dengan inovasi baru yang dapat menjadi product bermanfaat yang dapat dikenal di tingkat nasional dan internasional. Untuk menciptakan kemajuan Indonesia dalam riset dan pengembangan teknologi robot salah satunya diperlukan keikutsertaan mahasiswa dari perguruan tinggi di Indonesia dalam riset dan pengembangan teknologi robotika. Oleh karena itu sebagai mahasiswa perguruan tinggi di Indonesia(Institut Teknologi Sepuluh Nopember) diperlukan keikutsertaan dalam riset dan pengembangan robotika maka dalam Tugas Akhir ini berjudul “Rancang Bangun Sistem Pemetaan Otomatis Pada Mobile Robot Menggunakan Sensor Kinect dan Rotari Encoder”. Ini merupakan robot dalam katagori mobile robot yaitu robot bergerak. Robot ini dapat melakukan pemetaan secara otomatis pada saat robot bergerak pada suatu ruangan. Pemetaan otomatis yang dimaksud adalah kemampuan mobile robot untuk memetakan ruangan yang telah dilewati mobile robot dan hasil pemetaan ini direpresentasikan dalam bentuk peta dua dimensi. Peta dua dimensi ini menggambarkan kondisi ruangan yang dilalui robot dan nantinya peta dua dimensi ini oleh robot digunakan sebagai penunjuk arah jalan robot agar robot dapat bergerak otomatis sesuai jalur pada peta. Dengan menerapkan prinsip kerja robot ini salah satunya dapat diciptakan robot pengangkut barang yang dapat berjalan secara otomatis dengan lintasan berupa peta dua dimensi yang sudah dibuat sebelumnya.
II. LANDASAN TEORI
A. Pengukuran Posisi Robot Pada Bidang Kartesian[3] Pengukuran posisi robot pada bidang kartesian digunakan sensor rotari encoder. Sensor rotari yang digunakan adalah jenis incremental rotari encoder yang dapat mendeteksi arah
Perancangan Sistem Pemetaan Otomatis Pada
Mobile Robot Menggunakan Sensor Kinect dan
Rotari Encoder
Janu Anggoro D.A
1), Ronny Mardiyanto
2), Suwito
3),Pujiono
4)Jurusan Teknik Elektro, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember (ITS)
Jl. Arief Rahman Hakim, Surabaya 60111 Indonesia
e-mail:
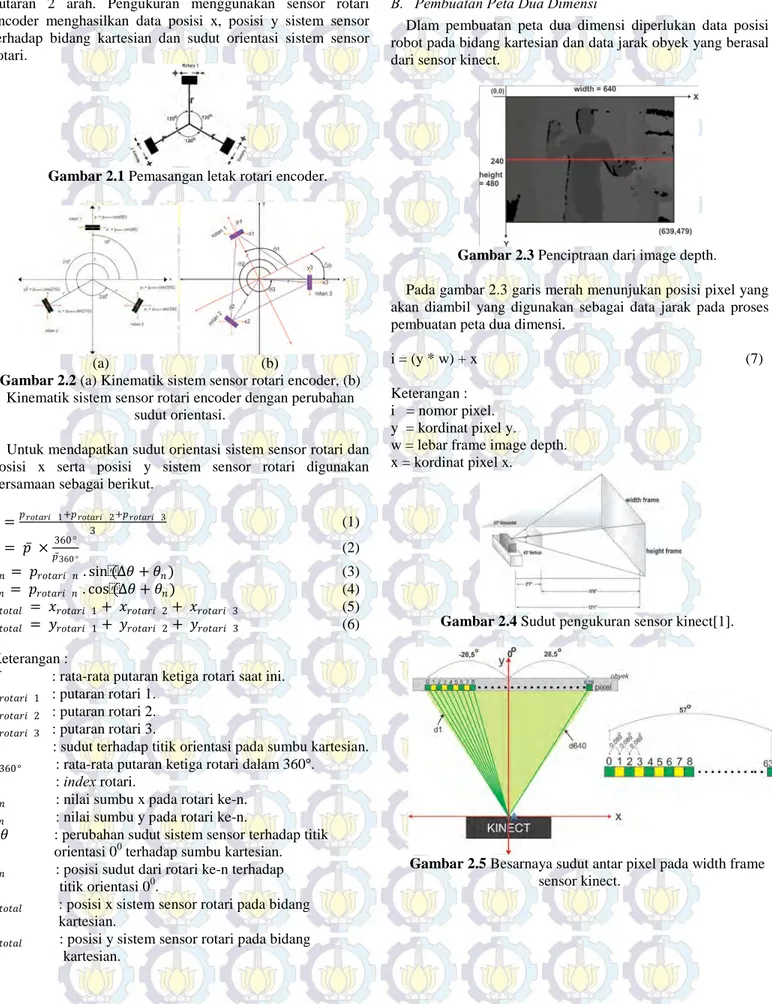
1)putaran 2 arah. Pengukuran menggunakan sensor rotari encoder menghasilkan data posisi x, posisi y sistem sensor terhadap bidang kartesian dan sudut orientasi sistem sensor rotari.
Gambar 2.1 Pemasangan letak rotari encoder.
(a) (b)
Gambar 2.2 (a) Kinematik sistem sensor rotari encoder, (b) Kinematik sistem sensor rotari encoder dengan perubahan
sudut orientasi.
Untuk mendapatkan sudut orientasi sistem sensor rotari dan posisi x serta posisi y sistem sensor rotari digunakan persamaan sebagai berikut.
𝑝𝑝̅ =𝑝𝑝𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟 1+𝑝𝑝𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟 2+𝑝𝑝𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟 3 3 (1) 𝜃𝜃 = 𝑝𝑝̅ ×𝑝𝑝̅360° 360° (2) 𝑥𝑥𝑛𝑛 = 𝑝𝑝𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟 𝑛𝑛 . sin(∆𝜃𝜃 + 𝜃𝜃𝑛𝑛) (3) 𝑦𝑦𝑛𝑛 = 𝑝𝑝𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟 𝑛𝑛 . cos(∆𝜃𝜃 + 𝜃𝜃𝑛𝑛) (4) 𝑥𝑥𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑡𝑡 = 𝑥𝑥𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟 1+ 𝑥𝑥𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟 2+ 𝑥𝑥𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟 3 (5) 𝑦𝑦𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑡𝑡 = 𝑦𝑦𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟 1+ 𝑦𝑦𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟 2+ 𝑦𝑦𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟 3 (6) Keterangan :
𝑝𝑝 � : rata-rata putaran ketiga rotari saat ini. 𝑝𝑝𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟 1 : putaran rotari 1.
𝑝𝑝𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟 2 : putaran rotari 2. 𝑝𝑝𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟 3 : putaran rotari 3.
𝜃𝜃 : sudut terhadap titik orientasi pada sumbu kartesian. 𝑝𝑝̅360° : rata-rata putaran ketiga rotari dalam 360°.
𝑛𝑛 : index rotari.
𝑥𝑥𝑛𝑛 : nilai sumbu x pada rotari ke-n. 𝑦𝑦𝑛𝑛 : nilai sumbu y pada rotari ke-n.
∆𝜃𝜃 : perubahan sudut sistem sensor terhadap titik orientasi 00 terhadap sumbu kartesian.
𝜃𝜃𝑛𝑛 : posisi sudut dari rotari ke-n terhadap titik orientasi 00.
𝑥𝑥𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑡𝑡 : posisi x sistem sensor rotari pada bidang kartesian.
𝑦𝑦𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑡𝑡 : posisi y sistem sensor rotari pada bidang kartesian.
B. Pembuatan Peta Dua Dimensi
Dlam pembuatan peta dua dimensi diperlukan data posisi robot pada bidang kartesian dan data jarak obyek yang berasal dari sensor kinect.
Gambar 2.3 Penciptraan dari image depth.
Pada gambar 2.3 garis merah menunjukan posisi pixel yang akan diambil yang digunakan sebagai data jarak pada proses pembuatan peta dua dimensi.
i = (y * w) + x (7)
Keterangan : i = nomor pixel. y = kordinat pixel y. w = lebar frame image depth. x = kordinat pixel x.
Gambar 2.4 Sudut pengukuran sensor kinect[1].
Gambar 2.5 Besarnaya sudut antar pixel pada width frame sensor kinect.
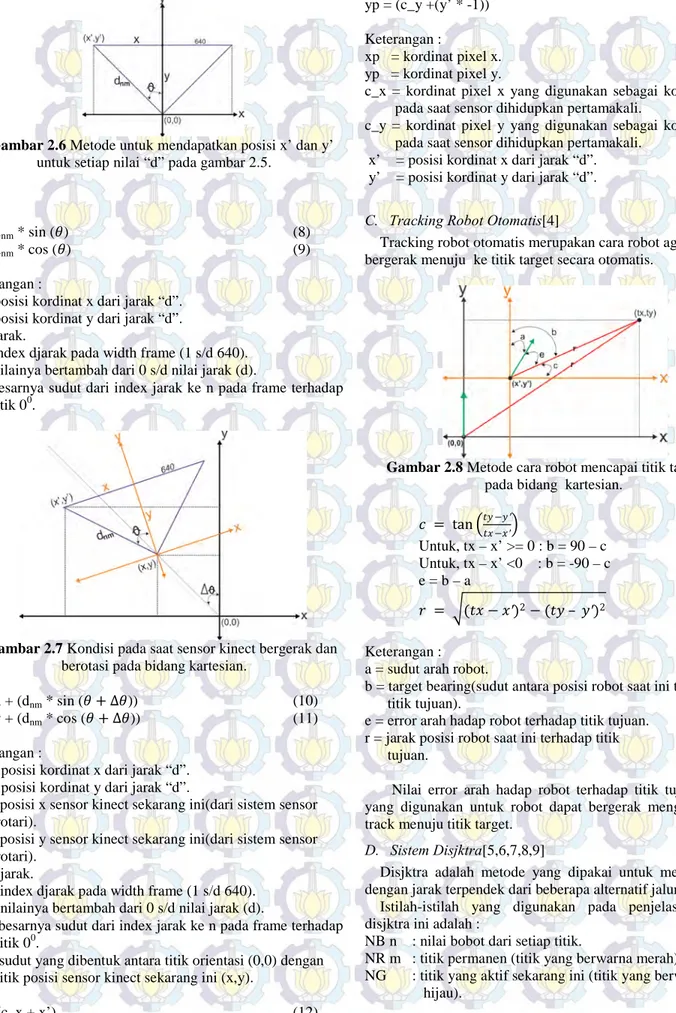
Gambar 2.6 Metode untuk mendapatkan posisi x’ dan y’ untuk setiap nilai “d” pada gambar 2.5.
x’ = dnm * sin (𝜃𝜃) (8)
y’ = dnm * cos (𝜃𝜃) (9)
Keterangan :
x’ = posisi kordinat x dari jarak “d”. y’ = posisi kordinat y dari jarak “d”. d = jarak.
n = index djarak pada width frame (1 s/d 640). m = nilainya bertambah dari 0 s/d nilai jarak (d).
𝜃𝜃 = besarnya sudut dari index jarak ke n pada frame terhadap titik 00.
Gambar 2.7 Kondisi pada saat sensor kinect bergerak dan berotasi pada bidang kartesian.
x’ = x + (dnm * sin (𝜃𝜃 + ∆𝜃𝜃)) (10) y’ = y + (dnm * cos (𝜃𝜃 + ∆𝜃𝜃)) (11) Keterangan :
x’ = posisi kordinat x dari jarak “d”. y’ = posisi kordinat y dari jarak “d”.
x = posisi x sensor kinect sekarang ini(dari sistem sensor rotari).
y = posisi y sensor kinect sekarang ini(dari sistem sensor rotari).
d = jarak.
n = index djarak pada width frame (1 s/d 640). m = nilainya bertambah dari 0 s/d nilai jarak (d).
𝜃𝜃 = besarnya sudut dari index jarak ke n pada frame terhadap titik 00.
∆𝜃𝜃 = sudut yang dibentuk antara titik orientasi (0,0) dengan titik posisi sensor kinect sekarang ini (x,y).
xp = (c_x + x’) (12)
yp = (c_y +(y’ * -1)) (13)
Keterangan :
xp = kordinat pixel x. yp = kordinat pixel y.
c_x = kordinat pixel x yang digunakan sebagai kordinat x=0 pada saat sensor dihidupkan pertamakali.
c_y = kordinat pixel y yang digunakan sebagai kordinat y=0 pada saat sensor dihidupkan pertamakali.
x’ = posisi kordinat x dari jarak “d”. y’ = posisi kordinat y dari jarak “d”. C. Tracking Robot Otomatis[4]
Tracking robot otomatis merupakan cara robot agar dapat bergerak menuju ke titik target secara otomatis.
Gambar 2.8 Metode cara robot mencapai titik target (x,y) pada bidang kartesian.
𝑐𝑐 = tan �𝑟𝑟𝑦𝑦−𝑦𝑦′𝑟𝑟𝑥𝑥−𝑥𝑥′� (14) Untuk, tx – x’ >= 0 : b = 90 – c (15) Untuk, tx – x’ <0 : b = -90 – c (16) e = b – a (17) 𝑟𝑟 = �(𝑟𝑟𝑥𝑥 − 𝑥𝑥′)2− (𝑟𝑟𝑦𝑦 – 𝑦𝑦′)2 (18) Keterangan : a = sudut arah robot.
b = target bearing(sudut antara posisi robot saat ini terhadap titik tujuan).
e = error arah hadap robot terhadap titik tujuan.
r = jarak posisi robot saat ini terhadap titik tujuan.
Nilai error arah hadap robot terhadap titik tujuan inilah yang digunakan untuk robot dapat bergerak mengikuti jalur track menuju titik target.
D. Sistem Disjktra[5,6,7,8,9]
Disjktra adalah metode yang dipakai untuk mencari jalur dengan jarak terpendek dari beberapa alternatif jalur yang ada.
Istilah-istilah yang digunakan pada penjelasan sistem disjktra ini adalah :
NB n : nilai bobot dari setiap titik.
NR m : titik permanen (titik yang berwarna merah). NG : titik yang aktif sekarang ini (titik yang berwarna
NY : titik sementara yang aktif sekarang ini (titik yang berwarna kuning).
NI n : nilai induk dari suatu titik. n : nama titik.
m : indeks dari nilai NR.
Gambar 2.9 sampai dengan gambar 2.14 adalah contoh algoritma disjktra dalam mencarian jalur terpendek. Titik A sebagai titik start dan titik D adalah titik finish.
Gambar 2.9 Prosses disjktra ke-1.
Gambar 2.10 Prosses disjktra ke-2.
Gambar 2.11 Prosses disjktra ke-3.
Gambar 2.12 Prosses disjktra ke-4.
Gambar 2.13 Prosses disjktra ke-5.
Kemudian dicari konektifitas pada titik-titik yang berhubungan dengan titik finish sampai dengan titik start. Yaitu sebagai berikut.
1. NR 4 = D, NI NR4 = C 2. NR 3 = C, NI NR3 = A
Sehingga jalur terpendek ditunjukan dengan jalur yang melalui titik A,C,D.
Gambar 2.14 Jalur yang memiliki jarak terpendek hasil disjktra.
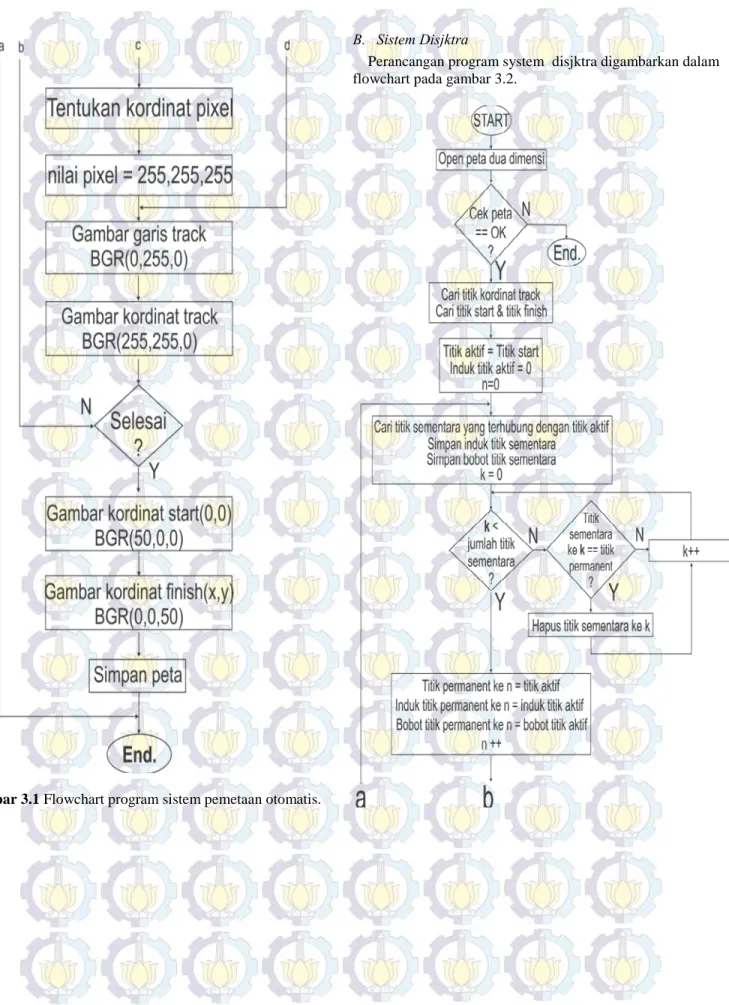
III. PERANCANGAN SISTEM A. Sistem Pemetaan
Perancangan program system pemetaan otomatis digambarkan dalam flowchart pada gambar 3.1.
NG = A, NB A = 0, NI A = 0 NY = B, NB B = 3, NI B = A NY = C, NB C = 4, NI C = A NR 1= A, NB NR1 = 0, NI NR1 = 0 NG = B, NB B = 3, NI B = A NY = C, NB C = 4, NI C = A NY = D, NB D = 11, NI D = B NR 1= A, NB NR1 = 0, NI NR1 = 0 NR 2= B, NB NR2 =3, NI NR2 =A NG = C, NB C = 3, NI C = A NY = D, NB D = 11, NI D = B NY = D, NB D = 9, NI D = C NR 1= A, NB NR1 = 0, NI NR1 = 0 NR 2= B, NB NR2 =3, NI NR2 = A NR 3= C, NB NR3 =4, NI NR3 = A NG = D, NB D = 9, NI D = C NR 1= A, NB NR1 = 0, NI NR1 = 0 NR 2= B, NB NR2 =3, NI NR2 = A NR 3= C, NB NR3 =4, NI NR3 = A NR 4= D, NB NR4 =9, NI NR4 = C
Gambar 3.1 Flowchart program sistem pemetaan otomatis.
B. Sistem Disjktra
Perancangan program system disjktra digambarkan dalam flowchart pada gambar 3.2.
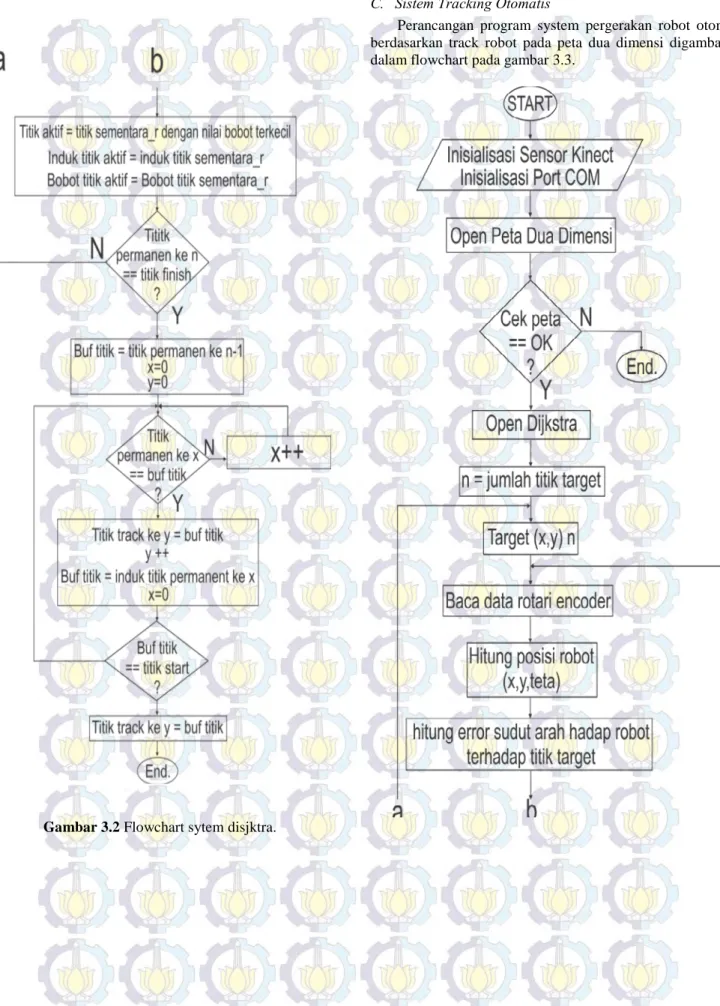
Gambar 3.2 Flowchart sytem disjktra.
C. Sistem Tracking Otomatis
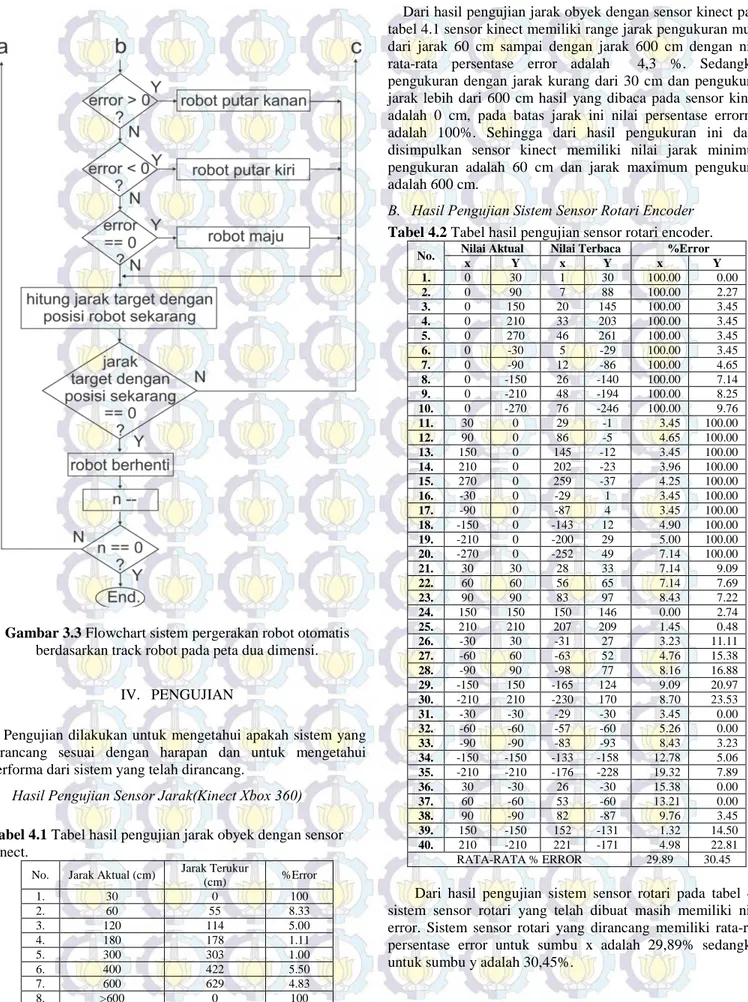
Perancangan program system pergerakan robot otomatis berdasarkan track robot pada peta dua dimensi digambarkan dalam flowchart pada gambar 3.3.
Gambar 3.3 Flowchart sistem pergerakan robot otomatis berdasarkan track robot pada peta dua dimensi.
IV. PENGUJIAN
Pengujian dilakukan untuk mengetahui apakah sistem yang dirancang sesuai dengan harapan dan untuk mengetahui performa dari sistem yang telah dirancang.
A. Hasil Pengujian Sensor Jarak(Kinect Xbox 360) Tabel 4.1 Tabel hasil pengujian jarak obyek dengan sensor kinect.
No. Jarak Aktual (cm) Jarak Terukur
(cm) %Error 1. 30 0 100 2. 60 55 8.33 3. 120 114 5.00 4. 180 178 1.11 5. 300 303 1.00 6. 400 422 5.50 7. 600 629 4.83 8. >600 0 100
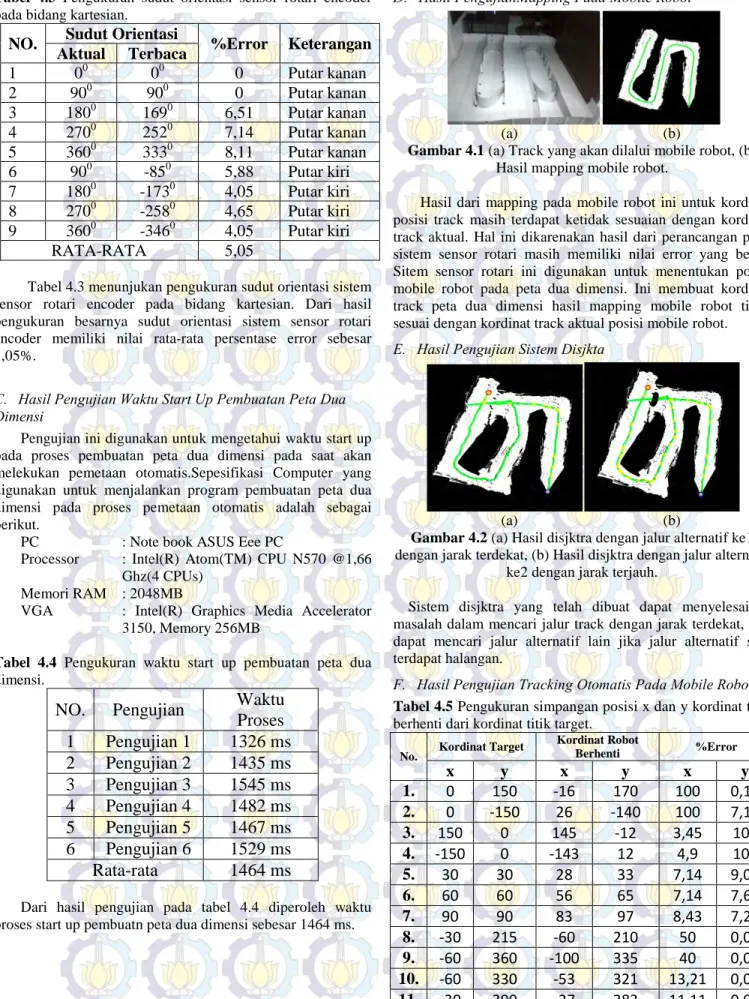
Dari hasil pengujian jarak obyek dengan sensor kinect pada tabel 4.1 sensor kinect memiliki range jarak pengukuran mulai dari jarak 60 cm sampai dengan jarak 600 cm dengan nilai rata-rata persentase error adalah 4,3 %. Sedangkan pengukuran dengan jarak kurang dari 30 cm dan pengukuran jarak lebih dari 600 cm hasil yang dibaca pada sensor kinect adalah 0 cm, pada batas jarak ini nilai persentase errornya adalah 100%. Sehingga dari hasil pengukuran ini dapat disimpulkan sensor kinect memiliki nilai jarak minimum pengukuran adalah 60 cm dan jarak maximum pengukuran adalah 600 cm.
B. Hasil Pengujian Sistem Sensor Rotari Encoder Tabel 4.2 Tabel hasil pengujian sensor rotari encoder.
No. Nilai Aktual Nilai Terbaca %Error
x Y x Y x Y 1. 0 30 1 30 100.00 0.00 2. 0 90 7 88 100.00 2.27 3. 0 150 20 145 100.00 3.45 4. 0 210 33 203 100.00 3.45 5. 0 270 46 261 100.00 3.45 6. 0 -30 5 -29 100.00 3.45 7. 0 -90 12 -86 100.00 4.65 8. 0 -150 26 -140 100.00 7.14 9. 0 -210 48 -194 100.00 8.25 10. 0 -270 76 -246 100.00 9.76 11. 30 0 29 -1 3.45 100.00 12. 90 0 86 -5 4.65 100.00 13. 150 0 145 -12 3.45 100.00 14. 210 0 202 -23 3.96 100.00 15. 270 0 259 -37 4.25 100.00 16. -30 0 -29 1 3.45 100.00 17. -90 0 -87 4 3.45 100.00 18. -150 0 -143 12 4.90 100.00 19. -210 0 -200 29 5.00 100.00 20. -270 0 -252 49 7.14 100.00 21. 30 30 28 33 7.14 9.09 22. 60 60 56 65 7.14 7.69 23. 90 90 83 97 8.43 7.22 24. 150 150 150 146 0.00 2.74 25. 210 210 207 209 1.45 0.48 26. -30 30 -31 27 3.23 11.11 27. -60 60 -63 52 4.76 15.38 28. -90 90 -98 77 8.16 16.88 29. -150 150 -165 124 9.09 20.97 30. -210 210 -230 170 8.70 23.53 31. -30 -30 -29 -30 3.45 0.00 32. -60 -60 -57 -60 5.26 0.00 33. -90 -90 -83 -93 8.43 3.23 34. -150 -150 -133 -158 12.78 5.06 35. -210 -210 -176 -228 19.32 7.89 36. 30 -30 26 -30 15.38 0.00 37. 60 -60 53 -60 13.21 0.00 38. 90 -90 82 -87 9.76 3.45 39. 150 -150 152 -131 1.32 14.50 40. 210 -210 221 -171 4.98 22.81 RATA-RATA % ERROR 29.89 30.45 Dari hasil pengujian sistem sensor rotari pada tabel 4.2 sistem sensor rotari yang telah dibuat masih memiliki nilai error. Sistem sensor rotari yang dirancang memiliki rata-rata persentase error untuk sumbu x adalah 29,89% sedangkan untuk sumbu y adalah 30,45%.
Tabel 4.3 Pengukuran sudut orientasi sensor rotari encoder pada bidang kartesian.
NO.
Sudut Orientasi
%Error
Keterangan
Aktual
Terbaca
1
0
00
00
Putar kanan
2
90
090
00
Putar kanan
3
180
0169
06,51
Putar kanan
4
270
0252
07,14
Putar kanan
5
360
0333
08,11
Putar kanan
6
90
0-85
05,88
Putar kiri
7
180
0-173
04,05
Putar kiri
8
270
0-258
04,65
Putar kiri
9
360
0-346
04,05
Putar kiri
RATA-RATA
5,05
Tabel 4.3 menunjukan pengukuran sudut orientasi sistem sensor rotari encoder pada bidang kartesian. Dari hasil pengukuran besarnya sudut orientasi sistem sensor rotari encoder memiliki nilai rata-rata persentase error sebesar 5,05%.
C. Hasil Pengujian Waktu Start Up Pembuatan Peta Dua Dimensi
Pengujian ini digunakan untuk mengetahui waktu start up pada proses pembuatan peta dua dimensi pada saat akan melekukan pemetaan otomatis.Sepesifikasi Computer yang digunakan untuk menjalankan program pembuatan peta dua dimensi pada proses pemetaan otomatis adalah sebagai berikut.
PC : Note book ASUS Eee PC
Processor : Intel(R) Atom(TM) CPU N570 @1,66 Ghz(4 CPUs)
Memori RAM : 2048MB
VGA : Intel(R) Graphics Media Accelerator 3150, Memory 256MB
Tabel 4.4 Pengukuran waktu start up pembuatan peta dua dimensi.
NO.
Pengujian
Waktu
Proses
1
Pengujian 1
1326 ms
2
Pengujian 2
1435 ms
3
Pengujian 3
1545 ms
4
Pengujian 4
1482 ms
5
Pengujian 5
1467 ms
6
Pengujian 6
1529 ms
Rata-rata
1464 ms
Dari hasil pengujian pada tabel 4.4 diperoleh waktu proses start up pembuatn peta dua dimensi sebesar 1464 ms.
D. Hasil PengujianMapping Pada Mobile Robot
(a) (b)
Gambar 4.1 (a) Track yang akan dilalui mobile robot, (b) Hasil mapping mobile robot.
Hasil dari mapping pada mobile robot ini untuk kordinat posisi track masih terdapat ketidak sesuaian dengan kordinat track aktual. Hal ini dikarenakan hasil dari perancangan pada sistem sensor rotari masih memiliki nilai error yang besar. Sitem sensor rotari ini digunakan untuk menentukan posisi mobile robot pada peta dua dimensi. Ini membuat kordinat track peta dua dimensi hasil mapping mobile robot tidak sesuai dengan kordinat track aktual posisi mobile robot. E. Hasil Pengujian Sistem Disjkta
(a) (b)
Gambar 4.2 (a) Hasil disjktra dengan jalur alternatif ke1 dengan jarak terdekat, (b) Hasil disjktra dengan jalur alternatif
ke2 dengan jarak terjauh.
Sistem disjktra yang telah dibuat dapat menyelesaikan masalah dalam mencari jalur track dengan jarak terdekat, dan dapat mencari jalur alternatif lain jika jalur alternatif satu terdapat halangan.
F. Hasil Pengujian Tracking Otomatis Pada Mobile Robot Tabel 4.5 Pengukuran simpangan posisi x dan y kordinat titik berhenti dari kordinat titik target.
No. Kordinat Target
Kordinat Robot Berhenti %Error
x
y
x
y
x
y
1.
0
150
-16
170
100
0,12
2.
0
-150
26
-140
100
7,14
3.
150
0
145
-12
3,45
100
4.
-150
0
-143
12
4,9
100
5.
30
30
28
33
7,14
9,09
6.
60
60
56
65
7,14
7,69
7.
90
90
83
97
8,43
7,22
8.
-30
215
-60
210
50
0,02
9.
-60
360
-100
335
40
0,07
10.
-60
330
-53
321
13,21 0,03
11.
-30
390
-27
383
11,11 0,02
12.
-90
-90
-83
-93
8,43
3,23
13.
-150 -150
-133
-158
12,78 5,06
14.
-210 -210
-176
-228
19,32 7,89
15.
90
-90
82
-87
9,76
3,45
16.
150
-150
152
-131
1,32
14,5
17.
210
-210
221
-171
4,98 22,81
RATA-RATA
23,65
16,96
Tabel 4.5 menunjukan simpangan posisi x dan posisi y mobile robot dari titik mobile robot berhenti ke titik target pada proses tracking otomatis. Dari hasil pengukuran untuk pengukuran simpangan posisi x memiliki nilai rata-rata persentase error sebesar 23,65% sedangkan posisi y adalah 16,96%.
KESIMPULAN
Kesimpulan yang diperoleh dalam Tugas Akhir ini adalah:
a. Sistem sensor rotari encoder yang dirancang mampu memetakan posisi mobile robot dalam kordinat kartesian dengan error 29,89% pada arah X dan error 30,45% pada arah Y. Kemudian pembacaan sudut orientasi pada sistem sensor rotari encoder pada bidang kartesian memiliki nilai error 5,05%.
b. Jarak pada peta dua dimensi hasil proses pemetaan yang dilakukan oleh mobile robot memiliki nilai error sebesar 4,3%.
c. Besarnya waktu start up untuk membuat peta dua dimensi sebesar 1464 ms .
d. Peta dua dimensi hasil dari proses pemetaan oleh mobile robot sudah dapat menggambarkan bentuk ruangan yang telah diliwati mobile robot, tetapi masih ada simpangan kordinat jalur track pada peta dua dimensi dari posisi jalur track sebenarnya hal ini dikarenakan sistem sensor rotari encoder yang dirancang masih memiliki nilai error.
e. Sistem Dijkstra dapat mencari jalur terpendek pada peta dua dimensi dengan error 0%.
f. Mobile robot dapat melakukan tracking otomatis dengan kordinat target berasal dari kordinat track yang ada dalam peta dua dimensi dengan error 23,65% pada posisi X, dan error sebesar 16,96% pada posisi Y.
DAFTAR PUSTAKA
[1] Tsai Ching-Chih, Jiang Li-Bin, Wang Tai-Yu, Wang Tung-Sheng, “Kinematics Control of an Omnidirectional Mobile Robot”, Proceedings of 2005 CACS Automatic Control Conference Tainan, Taiwan, Nov 18-19,2005 [2] AL-Amri A. Salam, and Ahmed Iman, “Control of
Omni-Directional Mobile Robot Motion”, Al-Khwarizmi Engineering Journal, Vol. 6, No. 4, PP 1-9, 2010
[3] Sulistyo J, Widyanto T, Gustica Abi .N, "Penentuan Koordinat Posisi Robot Pada Bidang Kartesian",
Laporan Kerja Praktek, Institut Teknologi Sepuluh Nopember, 11 Nopember 2013
[4] Marta Bayu Sandi, Ardilla Fernando, Besari A.R. Anom, “Path Tracking Pada Mobile Robot Dengan Umpan Balik Odometri”, Politeknik Negeri Surabaya, Surabaya 2010
[5] Biswas Siddhartha Sankar, Alam Bashir, “Generalization of Dijkstra’s Algorithm for Extraction of Shortest Paths in Directed Multigraphs”, ISSN 1549-3636, Journal of Computer Science 9 (3): 377-382, 2013
[6] Nakayama Akira, Anazawa Tsutomu, “Dijkstra-Based Algorithms for the Shortest Path Problem With Edges of Negative Length”, Journal of the Operations Research Society of Japan, Vol. 56, N0. 2, June 2013, pp. 137-154 [7] Sniedovich Moshe, “Dijkstra’s algorithm revisited the
dynamic programming connexion”, Department of Mathematics and Statistics The University of Melbourne, Australia, Control and Cybernetics vol 35 No.3 2006 [8] Hazzars E, “Dijkstra’s Algorithm – Shortest Path”
<URL:
http://vasir.net/blog/game_development/dijkstras_algorit hm_shortest_path>, January, 2010
[9] Miller B and Ranum D, “Dijkstra’s Algorithm”<URL: http://interactivepython.org/runestone/static/pythonds/Gr aphs/graphshortpath.html >, 2013
[10] Pradhan Ninad, “Mobile Robot Navigation for Person Following in Indoor Environments” Graduate School of Clemson University, Agustus 2013
[11] Benavidez Patrick, and Jamshidi Mo, ”Mobile Robot Navigation and Target Tracking System ”, Proc. of the 2011 6th International Conference on System of System Engineering, Albuquerque, New Mexico, USA –June 27-30, 2011
[12] Biswas Joydeep, and Veloso Manuela, “Depth Camera Based Indoor Mobile Robot Lacalization and Navigation”, IEE International Conference on Robotics and Automation RiverCentre, Saint Paul, Minnesota, USA May 14-18, 2012
[13] Bailey and Durrant Hugh, “Simultaneous Localization and Mapping(SLAM)”, IEEE Robotics and Automation Magazine, September 2006
[14] Wolf Denis F, and Sukhatme Gaurav S, “Mobile Robot Simultaneous Localization and Mapping in Dynamic Environments”, Autonomous Robots 19, 53-65, 2005 [15] S. Thrun, and A. Bucken, “Learning maps for indoor
CMU-CS-96-121, Carnegie Mellon University, School of Computer Science, Pittsburgh, P A 15213, April 1996 [16] R. A. Newcombe, S. Izadi, O. Hilliges, D. Molyneaux,
D. Kim, A. J. Davison, P. Kohli, J. Shotton, S. Hodges, and A. Fitzgibbon, “Kinectfusion: Real-time dense surface mapping and tracking”, In Proceedings of the 10th IEEE International Symposium on Mixed and Augmented Reality (ISMAR ’11), pages 127–136, Washington, DC, USA, 2011. IEEE Computer Society [17] Riccardo Campana, “People Detection and Tracking
with Kinect for Mobile Platforms”, Universita Di Padova Facolta Di Ingegneria, 24 October 2011
[18] Vamossy Zoltan, “Map Building and Localization of a Robot Using Omnidirectional Image Sequences”, Institute of Sotware Technology John von Neumann Faculty of Informatics Budapest Tech, Vol. 4, No. 3, 2007