BAB II
LANDASAN TEORI
2.1 PLC OMRON
Definisi PLC menurut National Electrical Manufactures Association (NEMA) adalah suatu alat elektonika digital yang menggunakan memori yang dapat diprogram untuk menyimpan instruksi-instruksi dari suatu fungsi tertentu seperti logika, sekuensial, pewaktu, pencacah dan aritmatika untuk mengendalikan mesin dari suatu proses.
PLC Omron CQM1H merupakan salah satu tipe PLC yang memiliki kecepatan yang tinggi yang dirancang untuk operasi kontrol yang mempunyai jumlah I/O dari 0 - 16 buah alamat per modul, dan bisa ditambah lagi sesuai kebutuhan, pada PLC Omron CQM1H terdapat juga internal relay yaitu dari 600 - 1500. Selain itu, PLC ini memiliki kemudahan dalam penginstalan, pengembangan, dan pemasangan sistem.
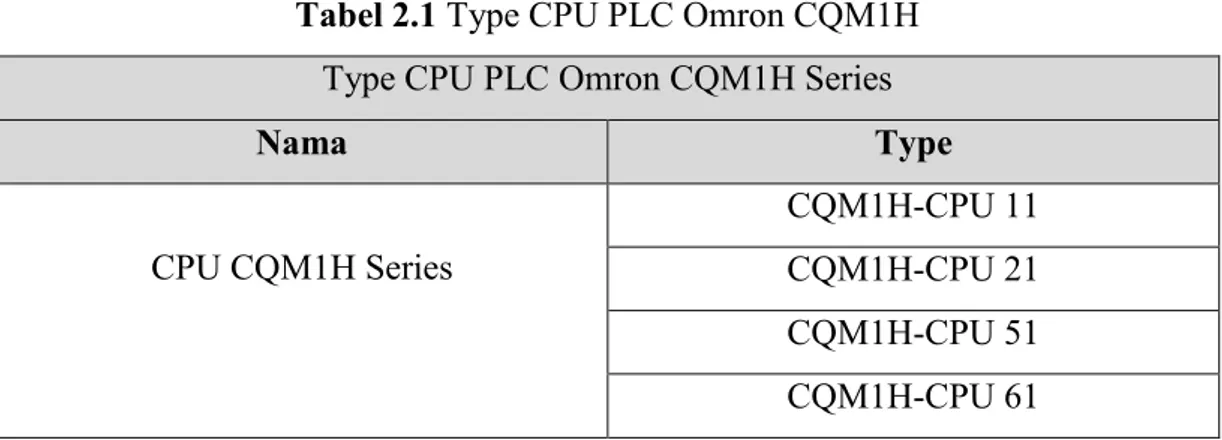
Tabel 2.1 Type CPU PLC Omron CQM1H Type CPU PLC Omron CQM1H Series
Nama Type CPU CQM1H Series CQM1H-CPU 11 CQM1H-CPU 21 CQM1H-CPU 51 CQM1H-CPU 61
Pada tabel 2.1 dapat kita lihat tipe cpu dari plc Omron CQM1H, masing – masing cpu memiliki kapasitas proses data input dan output yang berbeda – beda, semakin besar type cpu maka akan semakin besar pula proses data input dan outputannya.
Tabel 2.2 Kapasitas Maximum I/O CPU CQM1H Kapasitas Maximum I/O CPU CQM1H
Nama Type Maximum I/O
CPU CQM1H Series CQM1H-CPU 11 256 (16 word) CQM1H-CPU 21 CQM1H-CPU 51 512 (32 Word) CQM1H-CPU 61
Setiap cpu memiliki kapasitas maximum input dan output yang berbeda, tipe cpu yang dipakai oleh penulis adalah CPU 21, dapat dilihat pada tabel 2.2 pada tipe CPU 21 memiliki kapasitas input dan output sebesar 256 (16word).
Kode 256 (16 word) dapat diartikan bahwa pada setiap input dan output terdapat 16 buah terminal, dan pada setiap terminal mempunyai kontak internal sebanyak 16 buah.
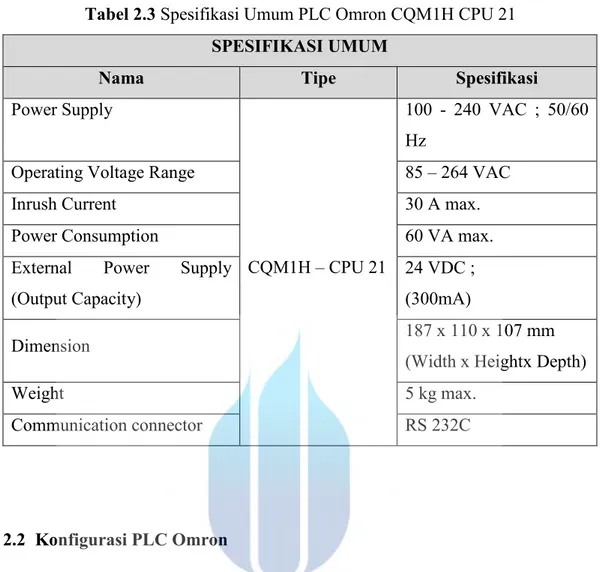
Tabel 2.3 Spesifikasi Umum PLC Omron CQM1H CPU 21 SPESIFIKASI UMUM
Nama Tipe Spesifikasi
Power Supply
CQM1H – CPU 21
100 - 240 VAC ; 50/60 Hz
Operating Voltage Range 85 – 264 VAC
Inrush Current 30 A max.
Power Consumption 60 VA max.
External Power Supply (Output Capacity)
24 VDC ; (300mA)
Dimension 187 x 110 x 107 mm
(Width x Heightx Depth)
Weight 5 kg max.
Communication connector RS 232C
2.2 Konfigurasi PLC Omron
PLC Omron mempunyai konfigurasi yang terdiri dari 6 bagian utama yaitu:
2.2.1 Unit Power Supply
Unit ini berfungsi untuk memberikan tegangan pada blok CPU PLC, biasanya berupa switching power supply.
2.2.2 CPU
Unit CPU merupakan otak dari PLC, disinilah program akan diolah sehingga sistem kontrol yang telah kita desain bekerja seperti yang kita inginkan. CPU PLC sangat bervariasi macamnya tergantung pada masing-masing merk dan tipe PLC.
2.2.3 Memori Unit
Memori unit terdiri dari 3 kompenen yaitu : 1. RAM : Random Acces Memory
2. EPROM : Eraseable Progammable Read Only Memory 3. EEPROM : Electrical Eraseable Programmable Read Only
Memory
2.2.4 Input Unit
Input unit atau Input digital dapat disamakan dengan Input Point Digital terdiri dari beberapa unsur yaitu :
DC 24 V input
DC 5 V input / TTL (Transistor Transistor Logic) AC/DC 24 V input AC 110 V input AC 220 V input Input Analaog 0 – 10 V DC -10 V DC – 10 V DC 4 – 20 mA DC 2.2.5 Output Unit
Output unit terdiri dari 2 komponen yaitu Relay Output dan
Output Analog atau disebut juga Output Point Linier. Adapun
AC 110 V output AC 220 V output
DC 24 V output,tipe PNP dan tipe NPN.
Sedangkan Output Analog atau Output Point Linier terdiri dari : 0 – 1 V DC
-10 V DC – 10 V DC• 4 – 20 mA DC 4 – 20 mA DC
2.2.6 Peripheral
Yang termasuk peripheral adalah : SSS (Sysmac Support Software) EPROM writer
GPC (Graphic Programming Console FIT (Factory Intelegent Terminal)
Gambar 2.1 PLC Konfigurasi
2.3 Konsep PLC Secara Umum
Konsep PLC decara umum dapat dibagi menjadi 3 unsur, yaitu :
1. Programmable
Menunjukkan kemampuan dalam hal memori untuk menyimpan program yang telah dibuat serta dengan mudah diubah-ubah fungsi atau kegunaannya.
2. Logic
Menunjukkan kemampuan dalam memproses input secara aritmatik
dan logic (ALU), yakni melakukan operasi membandingkan,
menjumlahkan, mengalikan, membagi, mengurangi, AND, OR, dan lain sebagainya.
3. Controller
Menunjukkan kemampuan dalam mengontrol dan mengatur proses sehingga menghasilkan output yang diinginkan.
PLC ini dirancang untuk menggantikan suatu rangkaian relay sequensial dalam suatu sistem kontrol. Selain dapat diprogram, alat ini juga dapat dikendalikan, dan dioperasikan oleh orang yang tidak memiliki pengetahuan di bidang pengoperasian komputer secara khusus. PLC ini memiliki bahasa pemrograman yang mudah dipahami dan dapat dioperasikan bila program yang telah dibuat dengan menggunakan software yang sesuai dengan jenis plc yang digunakan sudah dimasukkan.
2.4 Fungsi PLC Secara Umum
2.4.1. Sekuensial Control
PLC memproses input sinyal biner menjadi output yang digunakan untuk keperluan pemrosesan teknik secara berurutan (sekuensial), disini PLC menjaga agar semua step atau langkah dalam proses sekuensial berlangsung dalam urutan yang tepat.
2.4.2. MonitoringPlant
PLC secara terus menerus memonitor status suatu sistem (misalnya temperatur, tekanan, tingkat ketinggian) dan mengambil tindakan yang diperlukan sehubungan dengan proses yang dikontrol (misalnya nilai sudah melebihi batas) atau menampilkan pesan tersebut pada operator.
2.4.3. Shutdown System
Prinsip kerja sebuah PLC adalah menerima sinyal masukan proses yang dikendalikan lalu melakukan serangkaian instruksi logika terhadap sinyal masukan tersebut sesuai dengan program yang tersimpan dalam memori lalu menghasilkan sinyal keluaran untuk mengendalikan aktuator atau peralatan lainnya.
2.5Komponen Pada PLC
Adapun penjelasan dari komponen-komponen pada PLC adalah sebagai berikut:
2.5.1 Central Processing Unit ( CPU )
CPU merupakan bagian utama dan merupakan otak dari aplikasi PLC. CPU ini berfungsi untuk melakukan komunikasi denngan PC atau consule, interkoneksi pada setiap bagian aplikasi PLC, mengeksekusi program-program, serta mengatur input dan output system, agar lebih jelasnya gambar CPU dapat dilihat pada Gambar 2.2
Gambar 2.2 CPU PLC OMRON CQM-1H
2.5.2 Memori
Memori merupakan tempat penyimpan data sementara dan tempat menyimpan program yang harus dijalankan, dimana program tersebut merupakan hasil terjemahan dari ladder diagram yang dibuat oleh user. Sistem memori pada PLC juga mengarah pada teknologi
flash memory. Dengan menggunakan flash memory maka akan sangat
mudah bagi pengguna untuk melakukan programming maupun
reprogramming secara berulang-ulang. Selain itu pada flash memory
juga terdapat eprom yang dapat dihapus berulang-ulang.
Sistem memori dibagi dalam blok-blok dimana masing-masing blok memiliki fungsi sendiri-sendiri. Beberapa bagian dari memori digunakan untuk menyimpan status dari input dan output, sementara bagian memori yang lain digunakan untuk menyimpan variable yang digunakan pada program seperti nilai timer dan counter.
Program PLC memiliki suatu rutin kompleks yang digunakan untuk memastikan memori PLC tidak rusak. Hal ini dapat dilihat lewat lampu indikator pada PLC. Agar lebih jelasnya gambar memori dapat dilihat pada gambar 2.3
Gambar 2.3 Memori CPU
2.5.3 Catu Daya
Catu daya (power supply) digunakan untuk memberikan tegangan pada PLC. Tegangan masukan pada program PLC biasanya sekitar 24 VDC atau 220 VAC. Pada PLC yang besar, catu daya biasanya diletakkan terpisah.
Catu daya tidak digunakan untuk memberikan daya secara langsung ke input maupun output, yang berarti input dan output murni merupakan saklar. Jadi pengguna harus menyediakan sendiri catu daya untuk input dan output pada PLC. Dengan cara ini maka PLC itu
tidak akan mudah rusak. Agar lebih jelasnya gambar catu daya dapat dilihat pada gambar 2.4
Gambar 2.4 Catu Daya PLC
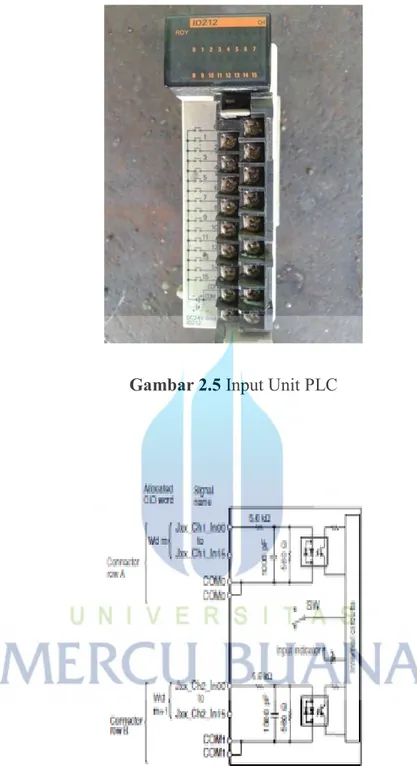
2.5.4 Rangkaian Input PLC
Kemampuan suatu sistem otomatis tergantung pada kemampuan program aplikasi PLC dalam membaca sinyal dari berbagai piranti
input contohnya sensor. Untuk mendeteksi suatu proses dibutuhkan
sensor yang tepat untuk tiap-tiap kondisi. Sinyal input dapat berupa logika 0 dan 1 (on dan off) ataupun analog. Untuk lebih jelasnya gambar Input unit dapat dilihat pada gambar 2.5
Gambar 2.5 Input Unit PLC
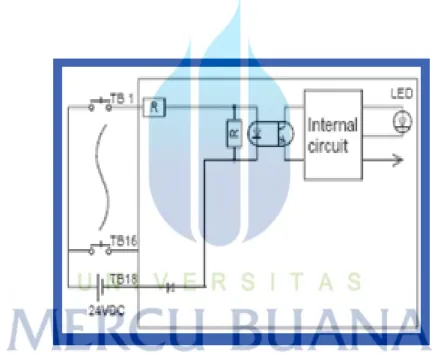
Gambar 2.6 Circuit Configuration
Dalam Penggunaan rangkaian input terbagi menjadi dua yaitu rangkaian sink ( NPN Sensor ) atau rangkaian source ( PNP Sensor ) untuk lebih jelasnya dapat dilihat pada gambar 2.7 dan 2.8
Gambar 2.7 Circuit Sink Type PLC Modular ( Input Sensor NPN )
Gambar 2.8 Circuit Source Type PLC Modular ( Input Sensor PNP )
2.5.5 Rangkaian Output PLC
Suatu sistem otomatis tidak akan lengkap jika sistem tersebut tidak memiliki jalur output. Output control ini dapat berupa analog maupun digital. Output analog digunakan untuk menghasilkan sinyal
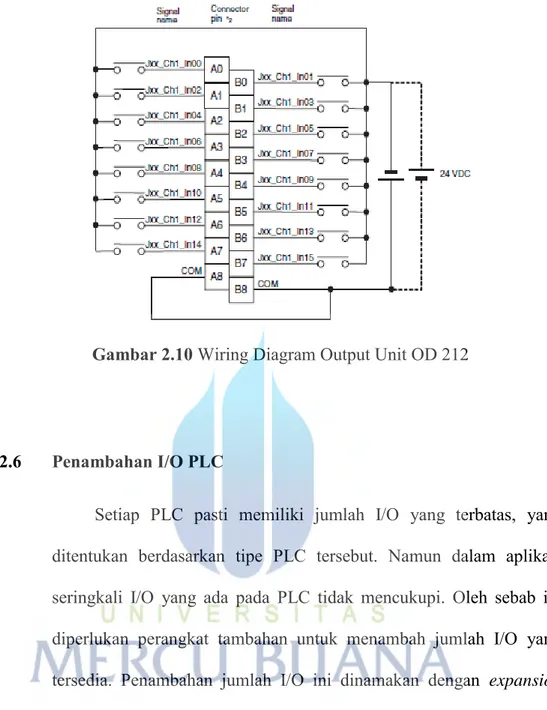
analog sedangkan output digital digunakan untuk menghubungkan dan memutuskan jalur, misalnya piranti output yang sering dipakai dalam PLC adalah motor, relay, solenoid, lampu, dan speaker.seperti pada rangkaian input program aplikasi PLC, pada bagian output PLC juga dibutuhkan suatu antarmuka yang digunakan untuk melindungi CPU dari peralatan eksternal. Antarmuka output PLC sama dengan antarmuka input PLC. Agar lebih jelasnya gambar output unit PLC dapat dilihat pada gambar 2.9 dan 2.10.
Gambar 2.10 Wiring Diagram Output Unit OD 212
2.6 Penambahan I/O PLC
Setiap PLC pasti memiliki jumlah I/O yang terbatas, yang ditentukan berdasarkan tipe PLC tersebut. Namun dalam aplikasi seringkali I/O yang ada pada PLC tidak mencukupi. Oleh sebab itu diperlukan perangkat tambahan untuk menambah jumlah I/O yang tersedia. Penambahan jumlah I/O ini dinamakan dengan expansion unit.
2.7 PLC Yang Digunakan
Type PLC pada Omron terbagi menjadi dua yaitu, modular dan
compact. Untuk perancangan yang sedang penulis lakukan adalah
beberapa bagian antara lain , base unit, power supply unit, cpu, memori, I/O unit.
Sedangkan untuk type modular base unit, power supply unit I/O Unit dan spesial unit semua terpisah (tidak menjadi satu seperti type
compact).
2.8 Software PLC Yang Digunakan
Dalam membuat program PLC kita membutuhkan software untuk berkomunikasi dengan PLC tersebut. Software yang dipergunakan untuk PLC Omron kita mempergunakan CX ONE.
2.9 MCB
MCB merupakan kependekan dari Miniature Circuit Breaker. Biasanya MCB digunakan oleh pihak PLN untuk membatasi arus sekaligus sebagai pengaman dalam suatu instalasi listrik. MCB berfungsi sebagai pengaman hubung singkat (konsleting) dan juga berfungsi sebagai pengaman beban lebih. MCB akan secara otomatis dengan segera memutuskan arus apabila arus yang melewatinya melebihi dari arus nominal yang telah ditentukan pada MCB tersebut. Arus nominal yang terdapat pada MCB adalah :
Kode 1A, 2A, 4A, 6A, 10A, 16A, 20A, 25A, 32A dan lain sebagainya.
Nominal MCB ditentukan dari besarnya arus yang bisa ia hantarkan, satuan dari arus adalah Ampere
.
2.10 Relay
Relay adalah komponen listrik yang dioperasikan sebagai saklar. Beberapa relay menggunakan elektromagnet untuk mengoperasikan pensaklaran secara mekanis, tetapi prinsip-prinsip operasi yang lain juga bisa digunakan. Relay diperlukan untuk mengendalikan rangkaian dengan sinyal daya rendah (dengan isolasi listrik yang lengkap antara kontrol dan rangkaian kontrol), atau di beberapa rangkaian yang harus dikontrol oleh satu sinyal. Relay pertama digunakan di rangkaian telegraf, mengulang sinyal yang datang dari suatu rangkaian dan mentransmisikan ulang ke rangkaian yang lain. Relay digunakan secara luas dalam perakitan telepon dan awal komputer untuk dapat melakukan operasi logis.
Jenis relay yang dapat menangani daya tinggi yang diperlukan untuk secara langsung mengendalikan motor listrik atau beban lainnya disebut kontaktor.
2.11 Dioda
Dalam elektronika, dioda adalah komponen aktif bersaluran dua (diode termionik mungkin memiliki saluran ketiga sebagai pemanas). Dioda mempunyai dua elektrode aktif dimana isyarat listrik dapat mengalir, dan kebanyakan diode digunakan karena karakteristik satu arah yang dimilikinya. Sifat kesearahan yang dimiliki sebagian besar jenis diode seringkali disebut karakteristik menyearahkan. Fungsi paling umum dari diode adalah untuk memperbolehkan arus listrik mengalir dalam suatu arah (disebut kondisi forward bias) dan untuk menahan arus dari arah sebaliknya (disebut kondisi reverse bias).
Ada banyak sekali macam dan jenis dioda yang anda harus pahami jika ingin mengenal lebih jauh tentang komponen-komponen Elektronika.
Macam-macam Dioda tersebut diantaranya yaitu :
a. Dioda Pemancar Cahaya atau LED
b. Foto Dioda
2.11.1 Dioda Pemancar Cahaya atau LED
Light Emmiting Dioda atau lebih dikenal dengan sebutan LED
(light-emitting diode) adalah suatu semikonduktor yang memancarkan
cahaya monokromatik.
Gambar 2.14 LED (light-emitting diode)
Gambar 2.15 Simbol LED
2.11.2 Foto Dioda
Foto Dioda adalah jenis dioda yang berfungsi mendeteksi cahaya. Berbeda dengan dioda biasa, komponen elektronika ini akan mengubah cahaya menjadi arus listrik. Cahaya yang dapat dideteksi oleh dioda foto ini mulai dari cahaya infra merah, cahaya tampak, ultra ungu sampai dengan sinar-X. Aplikasi dioda foto mulai dari penghitung kendaraan dijalan umum secara otomatis, pengukur cahaya pada kamera serta beberapa peralatan di bidang medis dan industry mesin.
Gambar 2.16 Foto Dioda
Gambar 2.16 Foto Dioda
Komponen Elektronika yang mirip dengan Foto Dioda adalah Transistor Foto (Phototransistor). Foto Transistor ini pada dasarnya adalah jenis transistor bipolar yang menggunakan kontak (junction) base-collector untuk menerima cahaya. Komponen ini mempunyai sensitivitas yang lebih baik jika dibandingkan dengan Dioda Foto. Namun demikian, waktu respons dari Transistor-foto secara umum akan lebih lambat dari pada Foto Dioda.
2.12 Motor DC
Motor DC merupakan sebuah perangkat elektromagnetis yang mengubah energi listrik menjadi energi mekanik. Energi mekanik ini digunakan untuk, memutar impeller pompa, fan atau blower, menggerakan kompresor, mengangkat bahan, dll. Motor listrik digunakan juga di rumah (mixer, bor listrik, kipas angin) dan di industri. Motor listrik kadangkala disebut “kuda kerja” nya industri sebab diperkirakan bahwa motor-motor menggunakan sekitar 70% beban listrik total di industri.
Keuntungan utama motor DC adalah sebagai pengendali kecepatan, yang tidak mempengaruhi kualitas pasokan daya. Motor ini dapat dikendalikan dengan mengatur:
• Tegangan dinamo – meningkatkan tegangan dinamo akan meningkatkan kecepatan.
• Arus medan – menurunkan arus medan akan meningkatkan kecepatan.
Motor DC tersedia dalam banyak ukuran, namun penggunaannya pada umumnya dibatasi untuk beberapa penggunaan berkecepatan rendah, penggunaan daya rendah hingga sedang seperti peralatan mesin dan rolling mills, sebab sering terjadi masalah dengan perubahan arah arus listrik mekanis pada ukuran yang lebih besar. Juga, motor tersebut dibatasi hanya untuk penggunaan di area yang bersih dan tidak berbahaya sebab resiko percikan api pada sikatnya. Motor DC juga relatif mahal dibanding motor AC.
Hubungan antara kecepatan, flux medan dan tegangan dinamo ditunjukkan dalam persamaan berikut:
Gaya elektromagnetik: E = KΦN
Torque: T = KΦIa
Dimana:
E = gaya elektromagnetik yang dikembangkan pada terminal dinamo (volt)
Φ = flux medan yang berbanding lurus dengan arus medan
N = kecepatan dalam RPM (putaran per menit)
T = torque electromagnetik
Ia = arus dinamo
K = konstanta persamaan
Komponen Utama Motor DC
Motor arus searah, sebagaimana namanya, menggunakan arus langsung yang tidak langsung (direct-unidirectional). Motor DC digunakan pada penggunaan khusus dimana diperlukan penyalaan torque yang tinggi atau percepatan yang tetap untuk kisaran kecepatan yang luas.
Gambar 2.19 Motor DC
Sebuah motor DC yang memiliki tiga komponen utama:
1. Kutub Medan
Secara sederhana digambarkan bahwa interaksi dua kutub magnet akan menyebabkan perputaran pada motor DC. Motor DC memiliki kutub medan yang stasioner dan dinamo yang menggerakan bearing pada ruang diantara kutub medan. Motor DC sederhana memiliki dua kutub medan: kutub utara dan kutub selatan. Garis magnetik energi membesar melintasi bukaan diantara kutub-kutub dari utara ke selatan. Untuk motor yang lebih besar atau lebih
komplek terdapat satu atau lebih elektromagnet. Elektromagnet menerima listrik dari sumber daya dari luar sebagai penyedia struktur medan.
2. Dinamo
Bila arus masuk menuju dinamo, maka arus ini akan menjadi elektromagnet. Dinamo yang berbentuk silinder, dihubungkan ke as penggerak untuk menggerakan beban. Untuk kasus motor DC yang kecil, dinamo berputar dalam medan magnet yang dibentuk oleh kutub-kutub, sampai kutub utara dan selatan magnet berganti lokasi. Jika hal ini terjadi, arusnya berbalik untuk.
3. Commutator
Komponen ini terutama ditemukan dalam motor DC. Kegunaannya adalah untuk membalikan arah arus listrik dalam dinamo. Commutator juga membantu dalam transmisi arus antara dinamo dan sumber daya.
2.13 Photo Sensor
Photo sensor terdiri dari bagian transmitter (pemancar cahaya) dan bagian
receiver (penerima cahaya). Photo sensor bekerja berdasarkan ada tidaknya cahaya (berasal dari transmitter) yang diterima oleh bagian receiver. Ada dua jenis switching dari sensor ini, yaitu Dark On dan Light On.
a. Dark On
b. Light On
Sensor akan On jika ada cahaya yang diterima oleh receiver.
Photo sensor dapat mendeteksi segala jenis benda dengan jarak deteksi maksimum 100 Mtr.
2.13.1 Jenis Photo Sensor
Ada tiga jenis dari Photo Sensor antara lain :
1. Reflex Light Barrier
Pada tipe ini transmitter dan receiver berada dalam 1 unit, dan dibutuhkan sebuah reflektor untuk memantulkan cahaya dari
transmitter ke receiver. Bila obyek menghalangi cahaya yang
diterima receiver, maka keluaran dari sensor akan berubah sesuai dengan jenis switchingnya. Tipe ini tidak bisa mendeteksi obyek yang mengkilap, karena pantulan cahaya dari transmitter oleh obyek yang mengkilap dapat mengacaukan kerja sensor tersebut.
2. Light Barriers
Pada tipe ini transmitter dan receiver terpisas dalam 2 unit, bila obyek menghalangi cahaya dari transmitter ke receiver maka keluaran dari sensor ini akan berubah sesuai dengan jenis switching dari sensor tersebut.
Gambar 2.21 Light Barrier Sensor
3. Reflex Light Sensor (diffuse)
Ada dua jenis type dari diffuse sensor ini yaitu diffuse dan diffuse with background suppression.
a. Diffuse
Pada tipe ini transmitter dan receiver berada dalam 1 unit. Apabila receiver menerima cahaya dari transmitter yang
dipantulkan oleh obyek, maka keluaran dari sensor akan berubah sesuai dengan jenis switchingnya.
b. Diffuse With Background Suppression
Tipe ini merupakan pengembangan dari tipe diffuse, sensor ini dapat digunakan untuk mendeteksi obyek dengan latar belakang. Jarak pada sistem ini dapat diatur sehingga hanya pantulan dari obyeknya yang mengubah keluaran dari sensor, sedangkan pantulan dari latar belakang tidak akan mengubah keluaran dari sensor.
Gambar 2.22 Reflex Light Sensor (diffuse)
2.14 Power Supply
Pengertian power supply adalah suatu hardware komponen elektronika yg mempunyai fungsi sebagai supplier arus listrik dengan terlebih dahulu merubah
tegangannya dari AC jadi DC. Jadi arus listrik PLN yang bersifat Alternating
Current (AC) masuk ke power supply, dikomponen ini tegannya diubah menjadi
Direct Current (DC) baru kemudian dialirkan ke komponen lain yang
membutuhkan. Proses pegubahan tegangan tersebut dilakukan karena hardware pada umumnya seperti komputer, hanya bisa bekerja dengan menggunakan arus DC.
Ibaratnya makhluk hidup, power supply sama dengan jantung yang fungsi utamanya untuk memompa hasil proses pembentukan darah keseluruh tubuh yang memerlukannya.
Gambar 2.23 Power Supply
2.15 Rumusan Perancangan Mekanikal Sistem
Untuk rancang bangun dan simulasi pengantar makanan dengan konveyor ini perancang selain membuat program elektrikal juga membuat desain mekanikal
yang diterapkan untuk mengimplementasikan agar rancangan tersebut dapat bekerja sesuai dengan yang diinginkan.
Dalam merancang sebuah system mekanikal perlu diperhatikan pengaruh,