Abstrak—Curah hujan yang sangat tinggi di Indonesia seringkali menimbulkan bencana banjir. Oleh karena itu diperlukan suatu alat atau aplikasi untuk memonitor gejala awal terjadinya banjir seperti mikrokontroler Arduino. Mikrokontroler Arduino Uno dapat dihubungkan dengan sensor yang dapat mendeteksi kondisi sekitarnya, salah satunya sensor kecepatan air dan sensor ultrasonik. Aplikasi ini dirancang untuk mendeteksi dini potensi banjir di titik yang sudah ditentukan. Data yang dibutuhkan pada aplikasi ini adalah besar kecepatan air, ketinggian air dan juga posisi lokasi geografis yang diukur kecepatan airnya. Data ketinggian dan kecepatan air tersebut diolah dengan algoritma fuzzy untuk mengefisienkan pengiriman data. Data kecepatan air, ketinggian air, dan posisi lokasi disimpan di sebuah database server. Tujuannya agar data kecepatan air, ketinggian air, dan posisi geografis dapat dibaca dalam sebuah aplikasi web. Untuk mengirim data ke server, digunakan protokol HTTP dengan fungsi POST. Pengiriman data didahului dengan melakukan koneksi ke server. Jika server tersedia, maka proses selanjutnya adalah melakukan pengiriman data dengan fungsi POST. Aplikasi web nantinya digunakan oleh end user. Untuk mendapatkan data kecepatan air dan ketinggian air, aplikasi web harus melakukan request ke server. Ketika aplikasi mengirim data ke server, secara otomatis server akan mengirim respon ke aplikasi klien. Hasil pengujian menunjukkan bahwa sensor ultrasonik tidak mampu menghitung secara tepat ketinggian air. Keakuratan yang didapatkan oleh mikrokontroler Arduino secara keseluruhan sebesar 91,1%, 94,2%, dan 93,9% untuk masing-masing kategori. Dengan tingkat keakuratan yang tinggi, sistem ini dapat diimplementasikan.
Kata Kunci—Arduino, Fuzzy, Mikrokontroler, Pendeteksi Banjir, Sensor Kecepatan Air, Sensor Ketinggian Air.
I. PENDAHULUAN
ANJIR merupakan peristiwa terbenamnya daratan karena volume air yang meningkat. Banjir dapat terjadi karena peluapan air yang berlebihan di suatu tempat akibat hujan besar, peluapan air sungai, atau pecahnya bendungan sungai. Di banyak daerah yang gersang di dunia, tanahnya mempunyai daya serapan air yang buruk, atau jumlah curah hujan melebihi kemampuan tanah untuk menyerap air. Ketika hujan turun, yang kadang terjadi adalah banjir secara tiba-tiba yang diakibatkan terisinya saluran air kering dengan air.
Pada umumnya banjir diakibatkan curah hujan. Dalam jangka waktu tertentu hujan mengakibatkan aliran air di permukaan bumi (run off). Volume run off dan kecepatan aliran air tidak sebanding dengan besarnya drainase dan
kecepatan aliran air menuju sungai atau kanal dan selanjutnya menuju penampungan air berupa waduk atau laut. Untuk itu diperlukan pengukuran kecepatan air beserta ketinggiannya untuk mengetahui seberapa besar potensi terjadinya banjir. Cara melakukan pengukuran salah satunya dengan menggunakan alat pengukur arus atau yang disebut current meter.
Perkembangan mikrokontroler dewasa ini membuat mikrokontroler dilengkapi sensor kecepatan air yang dapat menggantikan current meter. Sebagai contohnya adalah mikrokontroler Arduino bisa menghitung kecepatan air pada tempat yang sudah ditentukan. Dengan pendekatan tersebut sensor kecepatan ini dapat digunakan sebagai alternatif penghitung kecepatan air. Data dari sensor dilengkapi data posisi lokasi geografis. Data kecepatan air dan ketinggian air yang didapatkan dari sensor diolah dengan algoritma fuzzy untuk mengefisienkan pengiriman data sebelum dikirim ke server. Hasil dari pengolahan data ditampilkan ke pengguna melalui situs web.
Dengan kombinasi data kecepatan air, ketinggian air, dan informasi lokasi geografis, monitoring bencana banjir dapat dengan mudah dilakukan. Dengan diperolehnya informasi tersebut, dampak dari bencana banjir dapat diminimalisasi atau bahkan ditanggulangi.
II. METODOLOGI A. Dasar Teori
Pada bagian ini akan dijelaskan kajian pustaka atau dasar teori yang digunakan dalam menyelesaikan artikel ini.
1) Mikrokontroler Arduino
Arduino merupakan sebuah mikrokontroler single-board yang bersifat open-source [1]. Arduino dirancang sedemikian rupa sehingga memudahkan para penggunanya di bidang elektronika. Board Arduino didesain menggunakan processor Atmel AVR dan mendukung I/O pada board-nya. Software untuk Arduino terdiri dari compiler bahasa pemrograman standar dan boot-loader. Bahasa pemrograman yang digunakan adalah C. Dalam sebuah mikrokontroler Arduino dapat pula ditanamkan berbagai macam library maupun metode selama kapasitas memori dari sebuah mikrokontroler mencukupi.
Arduino juga menggunakan Integrated Development Environment (IDE) berbasis processing dimana processing
Gambar 1. Tampilan dari sensorultrasonik PING))) Parallax.
adalah bahasa open-source untuk menuliskan program ke komputer lainnya [1]. Jika ada sebuah proyek yang memerlukan beberapa komputer untuk berkomunikasi dengan Arduino, maka processing tersebut dapat digunakan, sehingga komputer-komputer tersebut dapat saling berkomunikasi dengan Arduino. Supaya mikrokontroler Arduino dapat berfungsi, Arduino juga dapat dipasangkan dengan berbagai macam sensor.
2) Sensor Ultrasonik PING))) Parallax
Sensor ultrasonik PING))) seperti pada Gambar 1 adalah device atau modul yang berfungsi untuk mengukur jarak dengan cara memancarkan sinyal ultrasonik [2]. Dengan ukuran yang cukup kecil yaitu lebar 2,1 cm dan panjang 4,5 cm, sensor ini dapat mengukur jarak antara 3 cm sampai 300 cm. Keluaran dari sensor berupa pulsa yang lebarnya merepresentasikan jarak. Lebar pulsanya bervariasi dari 115 μs sampai 18,5 ms.
Pada dasarnya, sensor ini terdiri dari sebuah chip pembangkit sinyal 40 KHz, sebuah speaker ultrasonik dan sebuah mikrofon ultrasonik. Speaker ultrasonik mengubah sinyal 40 KHz menjadi sinyal, sementara mikrofon ultrasonik berfungsi untuk mendeteksi pantulan sinyalnya. Pada modul sensor terdapat tiga pin yang digunakan untuk jalur power supply (+5V), ground, dan signal. Pin signal dapat langsung dihubungkan dengan mikrokontroler tanpa tambahan komponen apapun.
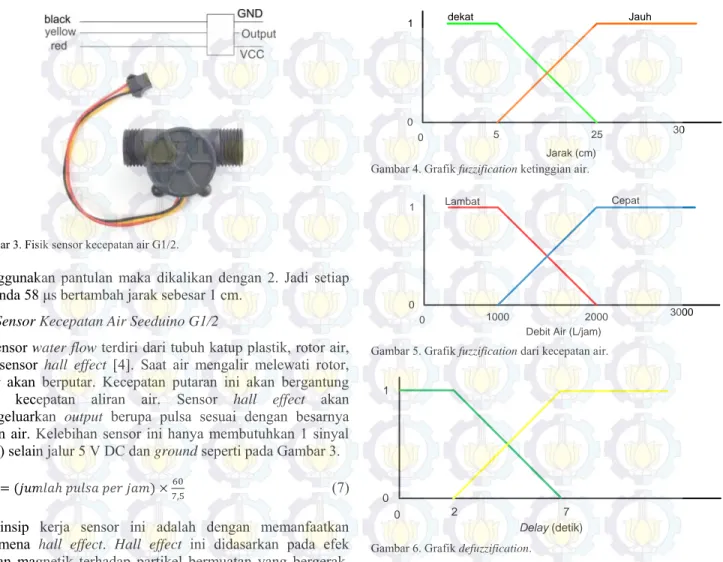
Sensor ultrasonik PING))) bekerja dengan cara memancarkan sinyal ultrasonik kemudian menangkap pantulannya. Ketika ada pulsa trigger dari mikrokontroler, sinyal ultrasonik dengan frekuensi dipancarkan selama 200 μs. Sinyal ini merambat di udara dengan kecepatan 344 m/s atau 1 cm setiap 29,034 μs. Lalu selama menunggu pantulan, sensor menghasilkan sebuah pulsa. Pulsa ini berhenti ketika sinyal pantulan tertangkap oleh sensor. Maka dari itu, lebar pulsa dapat merepresentasikan jarak sensor dengan objek. Selanjutnya mikrokontroler cukup mengukur lebar pulsa tersebut dan mengkonversinya dalam bentuk jarak. Langkah-langkah kerja sensor ultrasonik PING))) yang terdapat pada Gambar 2 dijelaskan sebagai berikut.
Kondisi awal SIG pin adalah 0,
Memberikan nilai 1 pada SIG pin selama 2 μs sampai 5 μs (tOUT) untuk mengaktifkan sensor ultrasonik PING))) agar memulai pengukuran,
Gambar 2. Range Finder sensor ultrasonik PING))) Parallax.
Tunggu hingga 750 μs (tHOLDOFF) yaitu saat sensor ultrasonik PING))) mulai memancarkan sinyal ultrasonik, Lalu buat SIG pin sebagai input yang akan membaca jarak
dengan cara membuat SIG pin bernilai 1. Apabila SIG pin berubah kondisi dari bernilai 1 menjadi bernilai 0, maka itulah jarak terukur,
Jika tidak terdapat dinding atau tidak ada jarak yang terukur, maka waktu (tIN-MAX) bernilai 18,5 μs dan berarti jarak yang terukur adalah 300 cm.
Ada dua cara memprogram sensor ultrasonik PING))), yaitu menggunakan timer dan delay. Dalam menggunakan timer yang harus dilakukan terlebih dahulu adalah mengetahui konstanta pengali untuk mendapatkan hasil keluaran nilai yang benar. Rumus awalnya terdapat pada (1). Untuk hitungan timer dapat dilihat pada (2) dengan catatan n adalah banyak pulsa dan f adalah frekuensi timer. Setelah melakukan penyederhanaan maka rumus dapat dikonversikan menjadi (3) dan (4). (1) (2) ⁄ (3) (4) ⁄ (5) (6)
Sedangkan dalam menggunakan delay sebelum memprogram kita harus mengetahui terlebih dahulu delay (waktu tunda) yang digunakan. Diketahui bahwa kecepatan sinyal di udara yaitu sebesar 344 m/s. Kecepatan tersebut diubah satuannya yang disesuaikan dengan output yang diinginkan yakni dalam satuan cm sehingga menjadi 34.400/1.000.000 cm/μs atau sama dengan 1/29,069767441 cm/μs. Lalu untuk mendapatkan jarak menggunakan delay dari hasil tersebut didapatkan (5) dan (6) [3]. Karena
Gambar 3. Fisik sensor kecepatan air G1/2.
menggunakan pantulan maka dikalikan dengan 2. Jadi setiap tertunda 58 μs bertambah jarak sebesar 1 cm.
3) Sensor Kecepatan Air Seeduino G1/2
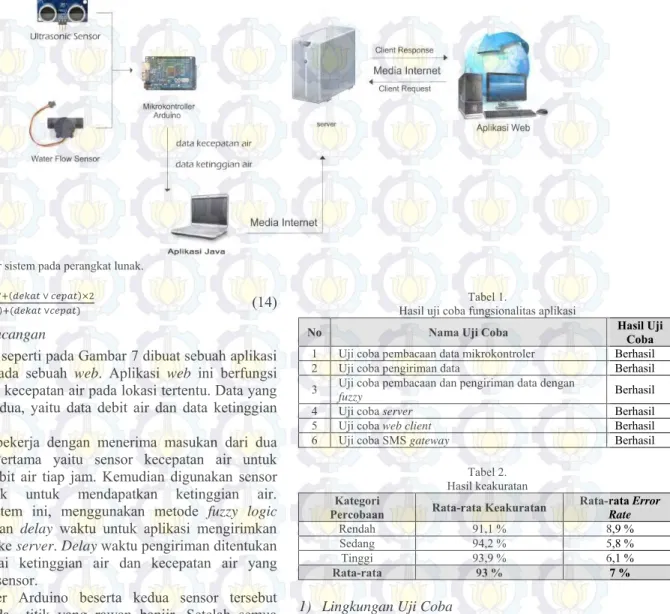
Sensor water flow terdiri dari tubuh katup plastik, rotor air, dan sensor hall effect [4]. Saat air mengalir melewati rotor, rotor akan berputar. Kecepatan putaran ini akan bergantung pada kecepatan aliran air. Sensor hall effect akan mengeluarkan output berupa pulsa sesuai dengan besarnya aliran air. Kelebihan sensor ini hanya membutuhkan 1 sinyal (SIG) selain jalur 5 V DC dan ground seperti pada Gambar 3.
(7)
Prinsip kerja sensor ini adalah dengan memanfaatkan fenomena hall effect. Hall effect ini didasarkan pada efek medan magnetik terhadap partikel bermuatan yang bergerak. Ketika ada arus listrik yang mengalir pada device efek hall yang ditempatkan dalam medan magnet yang arahnya tegak lurus arus listrik, pergerakan pembawa muatan akan berbelok ke salah satu sisi dan menghasilkan medan listrik. Medan listrik terus membesar hingga gaya Lorentz yang bekerja pada partikel menjadi nol. Perbedaan potensial antara kedua sisi device tersebut disebut potensial hall. Potensial hall ini sebanding dengan medan magnet dan arus listrik yang melalui device. Untuk mendapatkan nilai aliran air liter tiap jamnya dapat menggunakan rumusan seperti pada (7) [5].
4) Fuzzy Logic
Fuzzy logic digunakan untuk merepresentasikan masalah yang mengandung ketidakpastian. Jika dianalogikan dengan warna, fuzzy logic digunakan untuk merepresentasikan warna abu-abu [6].
Pada fuzzy logic, fungsi keangotaan atau membership function memainkan peranan yang sangat penting untuk merepresentasikan masalah dan menghasilkan keputusan yang akurat.Terdapat banyak sekali fungsi keanggotaan yang bisa digunakan.
Suatu sistem berbasis aturan fuzzy terdiri dari tiga komponen utama yaitu fuzzification, inference, dan defuzzification. Fuzzification berfungsi untuk mengubah masukan yang nilai kebenarannya bersifat pasti ke dalam bentuk fuzzy input. Sedangkan inference digunakan untuk melakukan penalaran menggunakan fuzzy input dan fuzzy rules yang telah ditentukan sehingga menghasilkan fuzzy output.
2000 3000
1000 0
Debit Air (L/jam) 0
Gambar 5. Grafik fuzzification dari kecepatan air.
7 2 0 Delay (detik) 0 1
Gambar 6. Grafik defuzzification.
Defuzzification digunakan untuk mengubah fuzzy output menjadi nilai berdasarkan fungsi keanggotaan yang telah ditentukan. Ada berbagai metode defuzzification yang dapat diaplikasikan untuk untuk berbagai macam masalah. Gambar 4 dan Gambar 5 adalah grafik fuzzification yang dipakai untuk
menentukan delay pada artikel ini. Rule yang dipakai untuk
menentukan delay adalah (8) dan (9).
(8) (9) Dengan rule yang sudah ditentukan, didapatkan persamaan
untuk mendapatkan fuzzy output. Persamaan untuk
mendapatkan fuzzy output seperti yang ada pada (10), (11),
(12), dan (13). (10) (11) (12) (13)
Hasil yang didapatkan dimasukkan pada grafik defuzzification seperti pada Gambar 6 untuk mendapatkan nilai delay yang diinginkan. Grafik tersebut menghasilkan persamaan untuk menentukan delay dari nilai fuzzy output seperti pada (14).
Gambar 7. Arsitektur sistem pada perangkat lunak.
(14)
B. Tahap Perancangan
Dalam sistem seperti pada Gambar 7 dibuat sebuah aplikasi yang berjalan pada sebuah web. Aplikasi web ini berfungsi untuk memantau kecepatan air pada lokasi tertentu. Data yang dibutuhkan ada dua, yaitu data debit air dan data ketinggian permukaan air.
Aplikasi ini bekerja dengan menerima masukan dari dua jenis sensor. Pertama yaitu sensor kecepatan air untuk mendapatkan debit air tiap jam. Kemudian digunakan sensor jarak ultrasonik untuk mendapatkan ketinggian air. Keseluruhan sistem ini, menggunakan metode fuzzy logic untuk menentukan delay waktu untuk aplikasi mengirimkan data dari sensor ke server. Delay waktu pengiriman ditentukan berdasarkan nilai ketinggian air dan kecepatan air yang didapatkan dari sensor.
Mikrokontroler Arduino beserta kedua sensor tersebut ditempatkan pada titik yang rawan banjir. Setelah semua diproses, aplikasi mengirimkan data ke server pusat. Server tersebut menyimpan semua informasi mengenai data kecepatan air, ketinggian air, dan lokasi geografis dari mikrokontroler Arduino. Server pusat tersebut juga menjadi sumber data bagi aplikasi klien yang berbasis web. Aplikasi mengirimkan data ke server menggunakan protokol HTTP dengan fungsi POST sebagai komunikasi datanya.
Web pada sistem ini menggunakan API dari Google Maps untuk memudahkan memonitor lokasi yang rawan terjadi banjir. Untuk tampilan awalnya terdapat peta yang menunjukkan daerah yang dimonitor beserta data kecepatan air dan juga ketinggiannya. Selain itu juga terdapat grafik perubahan data yang ditangkap oleh sensor kecepatan air dan sensor ketinggian air.
III. HASILDANPEMBAHASAN A. Uji Coba Aplikasi
Pada bagian ini akan dilakukan pengujian pada perangkat lunak yang telah dikembangkan. Adapun bentuk pengujian yang dilakukan dapat dijelaskan sebagai berikut.
Tabel 1.
Hasil uji coba fungsionalitas aplikasi
No Nama Uji Coba Hasil Uji Coba
1 Uji coba pembacaan data mikrokontroler Berhasil 2 Uji coba pengiriman data Berhasil 3 Uji coba pembacaan dan pengiriman data dengan fuzzy Berhasil 4 Uji coba server Berhasil
5 Uji coba web client Berhasil
6 Uji coba SMS gateway Berhasil
Tabel 2. Hasil keakuratan
Kategori
Percobaan Rata-rata Keakuratan Rata-rata Error Rate
Rendah 91,1 % 8,9 % Sedang 94,2 % 5,8 % Tinggi 93,9 % 6,1 %
Rata-rata 93 % 7 %
1) Lingkungan Uji Coba
Uji coba dilakukan pada sebuah bak air untuk uji coba sensor ketinggian air. Perangkat sensor diletakkan diatas pipa berukuran 34 cm dan pipa diberi pelampung setebal 2 cm. Pada uji coba ini, air dialirkan dengan selang air melalui sensor kecepatan air untuk mengetahui kecepatan air yang didapat dari sensor. Air yang melewati sensor kecepatan air dialirkan ke dalam bak air untuk mengisi bak. Ketinggian dari bak air didapatkan seiring ketinggian pelampung yang ada dalam pipa. Kedua sensor tersebut dihubungkan ke mikrokontroler Arduino. Sedangkan mikrokonroler Arduino dihubungkan dengan aplikasi pada laptop dengan media kabel USB. Untuk lingkungan uji coba memiliki spesifikasi sebagai berikut.
Bak air dengan ukuran 44 x 29 x 25 cm
Perangkat sensor (mikrokontroler Arduino, sensor ultrasonik, sensor kecepatan air, breadboard, satu set kabel jumper, kabel USB)
Pipa air Selang air
Modem GSM Prolink PHS100 Alat ukur penggaris
Notebook Sony VAIO VGN-CS36GJ Intel Core 2 Duo P8700 2.53 GHZ dengan RAM 4.00 GB DDR3
Dari percobaan dengan tiga kategori yang sudah dilakukan, dapat diketahui bahwa penggunaan sensor ultrasonik untuk mendeteksi ketinggian air kurang akurat. Dari beberapa kali percobaan di tiga kategori yang berbeda, perbedaan hasil tiap kategorinya tidak terlalu signifikan. Data keakuratan tiap kategorinya dapat dilihat pada Tabel 2. Dapat disimpulkan bahwa sensor tidak mampu membaca dengan pasti ketinggian air. Namun secara perhitungan, mikrokontroler Arduino mampu menghasilkan perhitungan dengan tingkat keakuratan yang tinggi yaitu sebesar 93%.
4) Uji Coba Performa Kecepatan Pengiriman Data
Pada uji coba ini aplikasi ini aplikasi akan mengirimkan data sebanyak 25 kali pengiriman. Uji coba ini dilakukan untuk mengetahui tingkat kesuksesan dalam pengiriman data ke server. Waktu pengiriman dan penerimaan akan dicatat untuk mengetahui waktu kirim dari aplikasi ke server. Dari hasil uji coba didapatkan rentang waktu pengiriman data dari aplikasi ke server berkisar antara 10 hingga 11 detik.
5) Uji Coba Performa Kecepatan Pengiriman SMS
Dari hasil uji coba dapat disimpulkan aplikasi SMS gateway dapat berjalan sebagaimana mestinya. Sistem dapat mengirimkan SMS secara otomatis saat indikator marker berwarna merah dengan artian ketinggian air sudah melewati batas aman. Waktu yang dibutuhkan untuk melakukan pengiriman kurang dari 1 detik.
IV. KESIMPULAN
Selama pengerjaan artikel ini, dapat diperoleh beberapa kesimpulan sebagai berikut.
1) Perangkat keras yang digunakan seperti mikrokontroler Arduino, sensor ultrasonik, dan sensor kecepatan air dapat digunakan untuk mendeteksi jarak dan kecepatan air, sehingga perangkat keras tersebut dapat menghitung
3) Aplikasi web client dapat menampilkan peta yang didalamnya terdapat marker-marker untuk mewakili posisi lokasi. Marker juga berisi informasi nama lokasi dan juga informasi ketinggian dan kecepatan air. User dapat melihat grafik perubahan data dari waktu ke waktu.
4) Sistem dapat mengirimkan pesan tanda bahaya berupa SMS. Pesan dikirimkan apabila ketinggian air sudah melebihi batas aman dengan kecepatan kurang dari 1 detik.
UCAPANTERIMAKASIH
Penulis G.P.N. mengucapkan terima kasih kepada Tuhan Yang Maha Esa, karena hanya dengan karunia, rahmat, dan hidayah-Nya penulisan artikel ini dapat terselesaikan dengan baik. Penulis juga mengucapkan terima kasih kepada semua pihak yang terkait dalam penyelesaian penulisan artikel ini.
DAFTARPUSTAKA
[1] “Arduino,” [Online]. Available: http://www.arduino.cc/. [Diakses 7 Maret 2013].
[2] P. Parallax, “Parallax Inc.,” [Online]. Available: http://www.parallax.com/Portals/0/Downloads/docs/prod/acc/28015-PING-Sensor-Product-Guide-v2.0.pdf. [Diakses 13 April 2013]. [3] M. F. Naufal, “MFNST,” [Online]. Available:
http://ini-robot.blogspot.com/2011/10/sensor-jarak-ultrasound-ping.html. [Diakses 13 April 2013].
[4] Arduino, “Water Flow Sensor,” 2013. [Online]. Available: http://forum.arduino.cc/index.php/topic,8548.0.html. [Diakses 3 Maret 2013].
[5] “Seeedstudio,” [Online]. Available: http://www.seeedstudio.com/depot/datasheet/water%20flow%20sensor %20datasheet.pdf. [Diakses 13 Juni 2013].
[6] L. B. d. E. Bryan, “Fuzzy Logic,” dalam Programmable Controllers Theory and Implementation Second Edition, USA, Industrial Text