Prototype Robot Tank Wireless Berbasis RF Transceiver
Sebagai Alat Bantu Navigasi
Muhammad Nurdin1), Sulaiman2), Reski Praminasari3), 1
Dosen D3Teknik Elektro Program Studi Teknik Elektronika Politeknik Negeri Ujung Pandang Email : [email protected]
2Dosen D3Teknik Elektro Program Studi Teknik Elektronika Politeknik Negeri Ujung Pandang
Email : [email protected]
3
Dosen D3Teknik Elektro Program Studi Teknik Elektronika Politeknik Negeri Ujung Pandang Email : [email protected]
Abstrak
Dewasa ini seiring dengan kemajuan dan perkembangan teknologi, banyak perangkat elektronik mengenai detektor keamanan/alat bantu dan navigasi latih meliter telah dibuat. Salah satunya dengan menggunakan teknologi robot yang dapat menggantikan tugas manusia sebagai alat bantu keamanan dan latih. Robot yang akan di buat adalah prototipe yang di kendalikan secara wireless (RF), dan bisa dipasang berbagai sensor yang diinginkan dan menampilkan hasil pembacaan sensor pada LCD maupun Monitor. Sebagai contoh aplikasinya dipasangkan sensor suhu, jarak dan kamera yang dapat mengirimkan gambar mengenai kondisi daerah yang di inginkan. Dari hasil pengujian di harapkan robot dapat dikendalikan dengan RF dari jarak yangh diinginkan, dan robot dapat menirimkan informasi suhu, jarak ke unit pengendali, serta dengan dipasangkan kamera wireless pada robot, maka pengendalian dapat dilihat posisi (lokasi) robot melalui monitor (LCD maupun komputer).
Kata Kunci: Robot, Sensor, Teknologi Wirelles, Navigasi
I. PENDAHULUAN
Fenomena perkembangan teknologi di dunia saat ini sangat membawa perubahan mendasar bagi perkembangan strategi kemiliteran didunia. Perubahan signifikan terjadi pada dunia kemiliteran yang berkaitan dengan perkembangan jenis-jenis senjata sehingga mampu merubah strategi dan taktik yang selama ini digunakan bahkan merubah doktrin-doktrin yang selama ini sangat diyakini oleh beberapa negara yang mengandalkan kemampuan perlawanan secara massal dalam merebut dan mempertahankan suatu wilayah. Untuk mengimbangi perkembangan yang terjadi dalam dunia kemiliteran, sehingga TNI tidak tertinggal dan hanya terpaku dengan kondisi sistem kesenjataan yang ada saat ini. Mau atau tidak mau maka TNI harus mengikuti perkembangan sistem kesenjataan yang berbasis teknologi dan modern sesuai dengan sistem kesenjataaan yang telah dimiliki oleh negara-negara lainnya, sehingga tidak tertinggal dengan kondisi berupa eforia kemenangan pada zaman perjuangan dahulu yang mengandalkan perang rakyat semesta
dengan memanfaatkan senjata alakadarnya berupa bambu runcing, kondisi geografi, semangat tinggi tanpa ada peralatan yang setara dengan maju dan modernnya perkembangan senjata yang dimiliki oleh negara-negara lain saat ini dan masa mendatang. [1],[2],[3]
1. Latar Belakang
Sebelum adanya perkembangan dengan menggunakan perangkat robot (cara lama), untuk melihat daerah yang berbahaya misalnya, memiliki kandungan radio aktif atau bom, dengan daerah yang belum diketahui medannya, maka digunakan cara lama yaitu dengan menggunakan seorang prajurit. Dengan perkembangan teknologi, terutama bidang robotika yang dapat dikendalikan dari jarak jauh dan dilengkapi beberapa alat navigasi berupa sensor yang diperlukan dapat mengurangi bahaya. Disisi lain sebagai penghematan tenaga parjurit dalam melakukan tindakan maupun aksi dalam suatu daerah berbahaya, dengan menggunakan Robot Tank Wireless Berbasis RF Transceiver Sebagai Alat Bantu Navigasi diharapkan dapat membantu
tugas-tugas rutin terutama TNI dalam melindungi dan mempertahankan Negara Kesatuan Republik Indonesia.
2. Tujuan
Tujuan akhir dari rancang bangun
prototype robot tank Wireless berbasis RF
transceiver sebagai alat bantu navigasi data
TNI-AD untuk mendapatkan informasi dalam bentuk data maupun gambar melalui kontrol jarak jauh.
3. Ruang Lingkup
Ada beberapa batasan, diantaranya adalah
a. Mekanik robot yang digunakan tidak dapat menaiki tangga.
b. Daya jangkau pengiriman data terbatas (± 10 meter).
c. Medan yang dapat dijelajah tidak terlalu berbatu-batu (batu yg berukuran besar).
4. Metodologi Pembahasan
Metodologi pembahasan yang dilakukan sesuai dgn langkah-langkah sebagai berikut :
a. Studi Literatur
Untuk mencara bahan-bahan serta konsep-konsep yang dapat mendukung perancangan robot tersebut, serta
mengetahui sistem kerja
mikrokontroller, motor dc dan sensor yang akan digunakan.
b. Pengumpulan data
Data-data yang di perlukan, antara lain
:Mikrokontroller Atmega32 Arduino Uno
EMS RF Transceiver Shield
Data Sheet Komponen Elektronik Pendukung
c. Analisa Data
Data yang diperoleh akan dianalisa untuk mengetahui efektifitas dalam pengiriman data maupun gambar melalui wirelles (RF), dengan aplikasi pembacaan sensor-sensor yang akan digunakan, dan hasil pembacaan data akan dikirim melalui wirelles (RF). d. Pengambilan kesimpulan
Dari hasil data tersebut dapat disimpulkan, bahwa sistem kinerja
pengiriman data melalai teknik wirelles diharapkan dapat bekerja dengan baik. II. KAJIAN LITERATUR
1. Teori Robot
Pada awalnya robot berasal dari kata “robota” yang merupakan bahasa Ceko yang berarti budak, pekerja, atau kuli. Pertama kali “robota” dipopulerkan oleh Karel Capek dalam sebuah pentas sandiwara pada tahun 1921 yang berjudul (Rossum’s Universal Robot). Pentas ini mengisahkan mesin yang menyerupai manusia yang dapat bekerja tanpa lelah yang kemudian memberontak dan menguasai manusia. Istilah “robot” inilah yang kemudian mulai popular yang kemudian menggantikan istilah pada masa itu.
Saat ini robot sudah dikenal secara mengglobal, tetapi pengertiannya tidaklah dipahami secara sama oleh setiap orang. Sebagian orang mendefinisikan robot sebagai mesin tiruan manusia (humanoid), meski demikian humanoid bukanlah satu-satunya jenis robot. Untuk memahami lebih jelas tentang pengertian robot, maka berikut ini akan disebutkan pengertian robot dari berbagai sumber: Pada kamus Webster menyebutkan pengertian robot adalah “An Automatic divice that performs function ordinarily ascribed to human being”. Sedangkan pafda kamus oxford disebutkan bahwa robot adalah “A machine Capable of carrying out a complex series of actions automatically, especially one programmed by a computer”.
Selain itu beberapa organisasi dalam bidang robotika juga memberikan definisi tersendiri, Robot Institute of America memberi mendefinisikan robot sebagai “A
reprogrammable multifunctional
manipulator designed to move materials, parts tool or other specialized devices through variabel programmed motions for the performance of a variety of taksks”. Sedangkan International Standard Organization (ISO 8373) mendefinisikan robot sebagai “An automatically controlled,
reprogrammable, multipurpose,
manipulator programmable in three or more axes, which may be either fixed in place or mobile for use ini industrial
automation applications” .Dari beberapa definisi diatas dapat ditarik kesimpulan bahwa robot merupakan alat yang:
a. Dapat memperoleh informasi dari lingkungan (melalui sensor)
b. Dapat diprogram
c. Dapat melakukan tugas yang berbeda d. Berkerja secara otomatis
e. Cerdas
f. Banyak digunakan dalam bidang industry
2. Mekanik Robot
Struktur robot sebagian besar dibangun berdasarkan konstruksi mekanik Robot yang mempunyai kemampuan navigasi dan manipulasi secara relatif memiliki konstruksi mekanik yang lebih rumit dibanding dengan yang berkemampuan navigasi saja, seperti mobile robot tanpa tangan yang hanya memiliki roda penggerak Namun demikian, robot berjalan (walking robot) seperti misalnya bi-ped (dua kaki) dapat memiliki konstruksi mekanik yg rumit dibandingkan dengan robot tangan planar. Hal mendasar yang perlu diperhatikan dalam desain mekanik robot adalah perhitungan kebutuhan torsi untuk menggerakkan sendi atau roda. Motor, sebagai penggerak utama (prime-mover) yang paling sering dipakai umumnya akan bekerja optimal ( torsi dan kecepatan putar paling ideal ) pada putaran yg relatif tinggi yg hal ini tidak sesuai bila porosnya dihubungkan langsung kesendi gerak atau roda, sebab kebanyakan gerakan yg diperlukan pada sisi anggota badan robot adalah relatif pelan namun bertenaga.Salah satu metode yang paling umum adalah menggunakan sistem GEAR.
3. Sensor
Terdapat berbagai macam sensor yang digunakan dalam teknik robotic dan merujuk pada data sheet sep[erti pada Tabel 1, dan dengan cara pengukuran dan cara interfacing ke kontroller. Diantaranya yaitu:
Sensor Biner.
Sensor biner menghasilkan output 1 atau 0 saja. Setiap perangkat sensor pada dasarnya dapat dioperasikan secara biner dengan menggunakan sistem threshold atau komparasi pada outputnya. Contoh : limit
switch yang dioperasikan sebagai sensor tabrakan yg dipasang pada buner robot.
Sensor Analog
Fenomena analog yg biasa diukur di dalam sistem internal robot berhubungan dengan posisi, kecepatan, percepatan, kemiringan / kecondongan, dsb. Yg diukur dari luar sistem robot banyak berhubungan dengan penetapan posisi koordinat robot terhadap referensi ruang kerja. Mis : posisi robot terhadap garis lintang dan bujur bumi. Contoh : sensor GPS
Sensor Kamera
Penggunaan kamera (digital) dalam dunia robotik dikenal sebagai robotics vision. Seperti halnya mata pada manusia, kamera dapat didesain sebagai mata robot. Kemampuan kamera digital biasanya diukur dari resolusi tangkapan gambarnya dalam pixels/inch atau pixels/cm. Makin besar resolusi maka makin akurat tangkapan gambarnya. (Gambar 1).
Gambar 1. Sensor Kamera Mikro
Tabel 1. Out Sensor dengan aplikasinya
4. Teknologi Wireless
Wireless atau wireless network merupakan sekumpulan perangkat elektronik yang saling terhubung antara satu dengan lainnya sehingga terbentuk sebuah jaringan komunikasi data dengan menggunakan media udara/gelombang sebagai jalur lintas datanya. Jika LAN masih menggunakan kabel sebagai media lintas data, sedangkan wireless menggunakan media gelombang
radio/udara. Penerapan dari aplikasi wireless network ini antara lain adalah jaringan nirkabel diperusahaan, atau mobile communication seperti handphone, dan HT. Wireless Personal Area Network (WPAN), mewakili teknologi personal area network
wireless seperti Radio Frequensi (RF)
Teknologi yang sudah lama digunakan namun, pasti kita tidak begitu sadar itu merupakan salah satu Wireless, dan RF ini merupakan perintis dari teknologi Wireless yang ada saat ini.
Kemunculan Teknologi Wireless ini dimulai dari peralatan handheld yang mempunyai kegunaan yang terbatas karena ukurannya dan kebutuhan daya. Tapi, teknologi berkembang, dan peralatan handheld menjadi lebih kaya akan fitur dan mudah dibawa. Telepon mobil
(Handphone), telah meningkat
kegunaannya yang sekarang
memungkinkannya berfungsi sebagai PDA selain telepon. Smart phone adalah gabungan teknologi telepon mobil dan PDA yang menyediakan layanan suara normal dan email, penulisan pesan teks, paging, akses web dan pengenalan suara. Generasi berikutnya dari telepon mobil, menggabungkan kemampuan PDA, IR, Internet wireless, email dan global positioning system (GPS). Perkembangan lain yang akan segera tersedia padalah sistem global untuk teknologi yang berdasar komunikasi bergerak (berdasar GSM) seperti General Packet Radio Service
(GPRS), Local Multipoint Distribution
Service (LMDS), Enhanced Data GSM
Environment (EDGE), dan Universal
Mobile Telecommunications Service
(UMTS). 5. Ardiuno
Uno Arduino merupakan platform open source baik secara hardwer dan software. Arduino terdiri dari mikrokontroler seperti ATmega8, ATmega168, ATmega328, ATmega1280, dan ATmega2560 dengan menggunakan Kristal osilator 16 MHz, namun ada beberapa tipe Arduino yang menggunakan Kristal osilator 8 MHz. catu daya yang dibutuhkan untuk mengoprasikan minimum system Arduino cukup dengan
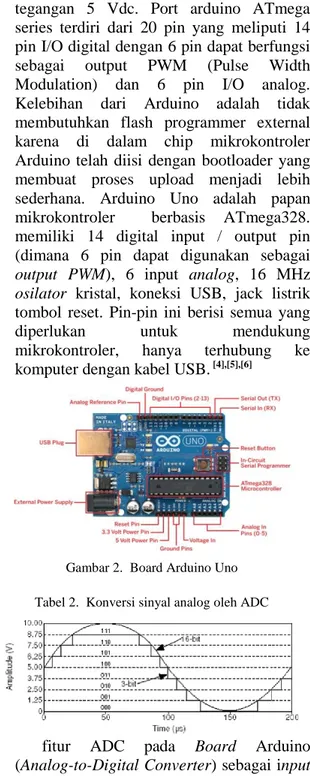
tegangan 5 Vdc. Port arduino ATmega series terdiri dari 20 pin yang meliputi 14 pin I/O digital dengan 6 pin dapat berfungsi sebagai output PWM (Pulse Width Modulation) dan 6 pin I/O analog. Kelebihan dari Arduino adalah tidak membutuhkan flash programmer external karena di dalam chip mikrokontroler Arduino telah diisi dengan bootloader yang membuat proses upload menjadi lebih sederhana. Arduino Uno adalah papan mikrokontroler berbasis ATmega328. memiliki 14 digital input / output pin (dimana 6 pin dapat digunakan sebagai
output PWM), 6 input analog, 16 MHz
osilator kristal, koneksi USB, jack listrik tombol reset. Pin-pin ini berisi semua yang
diperlukan untuk mendukung
mikrokontroler, hanya terhubung ke komputer dengan kabel USB. [4],[5],[6]
Gambar 2. Board Arduino Uno
Tabel 2. Konversi sinyal analog oleh ADC
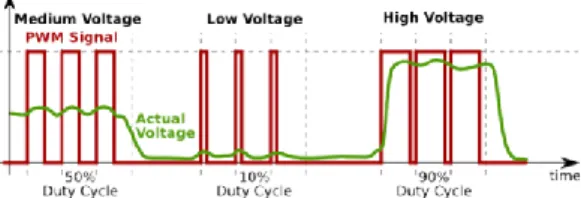
fitur ADC pada Board Arduino (Analog-to-Digital Converter) sebagai input analog dan pin digital PWM (Pulse-Width
Modulation) sebagai output analog. Grafik
konversi sinyal analog oleh ADC dan sinyal analog yang dihasilkan dengan metode PWM terdapat pada Tabel 1.2.
Gambar 3. Sinyal analog yang dihasil dengan metode PWM
III. METODE PENELITIAN
Rancang bangun prototype robot tank
Wireless berbasis RF transceiver sebagai
alat bantu navigasi data TNI-AD untuk mendapatkan informasi dalam bentuk data maupun gambar melalui kontrol jarak jauh. Hal ini adalah sebagai wujud interaksi antara manusia dengan mesin sehingga secara cepat dan tepat, dengan meminimalisir resiko yang akan didapt, maka dengan teknologi robotik adalah solusi yang terbaik saat ini. Rubot bekerja dengan kendali jarak jauh dengan menggunaka radio frekuensi (RF) berbasis teknologi wirelles , dimana dua buah antena yang satu di letakkan di robot tank dan ya satu lagi diletakkan terpisah di satukan dengan kontrol berupa keypad manual, sistem komunikasinya menggunakan jaringan wireless/nirkabel yang memanfaatkan gelombang elektromagnetik melalui udara sebagai media untuk mengirimkan informasi dari pengirim ke penerima. Sistem elektronik yang di gunakan pada prototype robot tank Wireless berbasis RF transceiver, adalah sistem komunikasi elektronik yang mana setiap sistem bekerja berdasarkan perintah, yang di kendalikan oleh prosessor IC mikrokontroller. Jarak komunikasi > 150 meter (receiver bandwidth = 67 KHz, transmitter freq. deviation = 45 KHz, data rate @ 1.2 kbps, pada area terbuka.). dan kecepatan transmisi data : up to 115.2 kbps.
EMS RF Transceiver Shield merupakan modul Shield Arduino™ compatible yang dapat digunakan untuk transmisi data secara
wireless. EMS RF Transceiver Shield
didesain sebagai modul add-on untuk DT-AVR Inoduino. Proses instalasi dapat dilakukan dengan mudah tanpa harus menggunakan kabel jumper.
Gambar 4. Alur sistem koneksi elektronik pada prototype robot tank Wireless berbasis RF transceiver
Selain DT-AVR Inoduino, dengan memperhatikan alokasi pinout, modul ini dapat digunakan bersama dengan board Arduino™ ataupun Arduino™ compatible lainnya. EMS RF Transceiver Shield dirancang berbasiskan modul RF RFM12S 433MHz, yaitu modul komunikasi wireless dengan frekuensi 433 MHz serta jarak komunikasi yang mencapai 150 meter. RFM12S 433MHz menggunakan antarmuka SPI untuk pengaksesannya oleh berbagai modul kontroler. EMS RF Transceiver Shield cocok digunakan pada aplikasi kontrol jarak jauh, sistem telemetri, ataupun aplikasi-aplikasi lainnya dimana instalasi kabel sulit untuk dilakukan. [7],[8]
Spesifikasi :
Berbasiskan modul RF RFM12S 433MHz.
Tegangan kerja : 5 VDC. Frekuensi kerja : 433 MHz.
Jarak komunikasi > 150 meter (receiver
bandwidth = 67 KHz, transmitter freq.
deviation = 45 KHz, data rate @ 1.2
kbps, pada area terbuka.).
Kecepatan transmisi data : up to 115.2 kbps.
Antarmuka : SPI.
Memiliki 4 buah pin opsional yang dapat dihubungkan dengan pin 32, 33, 37, 38 pada board DT-AVR Inoduino, Arduino™, ataupun Arduino™ compatible lainnya yang mendukung. Terintegrasi dengan konektor untuk
menghubungkan antenna (antenna 433 MHz include pada paket penjualan). Disediakan antenna pad untuk
menghubungkan antenna hasil rancangan user.
Dilengkapi dengan EMI filter untuk mengurangi gangguan electromagnetic interference.
Memiliki konsumsi arus rendah (standby, < 0.3 uA).
Terdapat contoh aplikasi penggunaan EMS RF Transceiver Shield untuk pengendalian robot tank.
Gambar 5. EMS RF Transceiver Shield
IV. HASIL DAN PEMBAHASAN
Cara kerja sistem RFremote.pde adalah modul akan menunggu 500ms untuk memastikan semua modul mendapat tegangan dan siap beroperasi. Modul akan melakukan inisialisasi untuk jalur komunikasi SPI dan pin 4, 9, serta 39-46. Pin 4 difungsikan sebagai input interrupt
request dari RFM12S. Pin 9 difungsikan
sebagai slave select untuk jalur SPI RFM12S. Pin 39-42 difungsikan sebagai input tactile switch. Pin 43-46 difungsikan sebagai output LED. Modul akan melakukan inisialisasi untuk modul RFM12S. Setelah inisialisasi, program akan masuk ke dalam loop. Program akan membaca logika pin 39-42 secara bergantian. Jika ada logika low di pin tersebut, maka LED (yang berdekatan dengan tactile switch) di pin 43-46 akan dinyalakan. Program juga akan memberi nilai pada variabel move sebagai kode tombol mana yang ditekan. Dalam hal ini, tombol pada pin 39 untuk gerakan mundur track kanan, tombol pin 40 untuk gerakan maju track kanan, tombol pin 41 untuk gerakan maju track kiri, dan tombol pin 42 untuk gerakan mundur track kiri. Setelah program mengetahui tombol mana yang ditekan atau dilepas dan memberi kode ke variabel move, program akan membandingkan dengan nilai variabel move dengan variabel premove. Jika sama, maka
program akan ke langkah premove beda dengan move, maka nilai move akan dikirimkan ke RFM12S untuk ditransmisikan ke Robot Tank. Lalu premove akan diisi dengan nilai move. Program akan memberi delay 100 ms.
Pengujian ini dilakukan untuk menjalankan sistem secara keseluruhan. Pengujian ini dilakukan dengan menjalankan program perintah pada mikrokontroller ardiuno, dimana cara kerja sistem RFtank.pde adalah modul akan menunggu 500ms untuk memastikan semua modul mendapat tegangan dan siap beroperasi. Modul akan melakukan inisialisasi untuk jalur komunikasi SPI dan pin 2-4 serta 7-12. Pin 4 difungsikan sebagai input interrupt request dari RFM12S. Pin 9 difungsikan sebagai slave select untuk jalur SPI RFM12S. Pin 10-11 difungsikan sebagai output PWM untuk motor (driver). Pin 2, 3, 7, 8, dan 12 difungsikan untuk mengatur arah dan kondisi driver.Modul akan melakukan inisialisasi untuk modul RFM12S. Setelah inisialisasi, program akan masuk ke dalam loop.Program akan membaca logika pin 4. Jika pin 4 berlogika low, maka ada penerimaan data. Data tersebut akan dibaca
Gambar 6. Flowchart dari program RFtank
Gambar 7. Flowchart Rf remote control
dan dimasukkan ke variabel move. Program akan melakukan dekode terhadap variabel move untuk menentukan arah gerakan track tank. Jika 4 bit MSB move bernilai C, maka pin 7 diberi logika high dan pin 8 diberi logika low untuk gerakan maju track kiri. Jika 4 bit MSB move bernilai 3, maka pin 7 diberi logika low dan pin 8 diberi logika high untuk gerakan mundur track kiri. Jika 4 bit MSB move bernilai 0, maka pin 7 dan pin 8 diberi logika high untuk menghentikan track kiri. Jika 4 bit LSB move bernilai C, maka pin 2 diberi logika high dan pin 3 diberi logika low untuk gerakan maju track kanan. Jika 4 bit LSB move bernilai 3, maka pin 2 diberi logika low dan pin 3 diberi logika high untuk gerakan mundur track kanan. Jika 4 bit LSB move bernilai 0, maka pin 2 dan pin 3 diberi logika high untuk menghentikan track kanan. Program akan
membersihkan buffer FIFO RFM12S dan menjalankan driver.
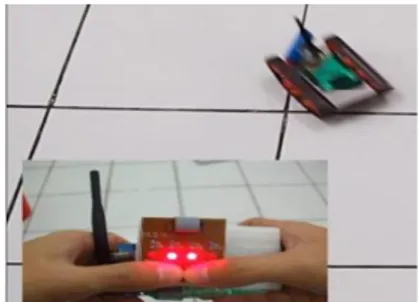
Gambar 8. Prototype robot tank Wireless berbasis RF transceiver
Gambar 9. Tampilan prosedur pemeograman Ardiuno
V. KESIMPULAN
Hasil perancangan sistem Rancang bangun prototype robot tank Wireless berbasis RF transceiver sebagai alat bantu navigasi data TNI-AD untuk mendapatkan informasi dalam bentuk data maupun gambar melalui kontrol jarak jauh. Sistem elektronik yang di gunakan pada prototype robot tank Wireless berbasis RF transceiver, adalah sistem komunikasi elektronik yang mana setiap sistem bekerja berdasarkan perintah, yang di kendalikan oleh prosessor IC mikrokontroller. Jarak komunikasi > 150 meter (receiver bandwidth = 67 KHz, transmitter freq. deviation = 45 KHz, data rate @ 1.2 kbps, pada area terbuka.). dan kecepatan transmisi data : up to 115.2 kbps.
UCAPAN TERIMA KASIH
Puji syukur penulis ucapkan kehadirat Tuhan Yang Maha Esa atas rahmat dan hidayahNya sehingga dapat menyelesaikan paper ini. Dalam penyelesaian paper ini banyak mendapatkan bantuan dari berbagai
pihak. Untuk ini penulis mengucapkan terima kasih sebesar-besarnya kepada, Direktur Politeknik Negeri Ujung Pandang, Ketua Jurusan Teknik Elektro dan Ketua Program Studi Teknik Elektronika, serta rekan sejawat Dosen beserta staf akademik.
REFERENSI
[1] Nalwan, A. (2012). Teknik Rancangan Bangun Robot, tingkat dasar. CV. Andi Offset:Yogyakarta
[2] Budiharto, W., & Purwanto, D. (2012).
Robot Vision. CV. Andi
Offset:Yogyakarta
[3] Pitowarno, E. (2006). Robotika, Disain, Kontrol, dan Kecerdasan Buatan. CV.Andi Offset:Yogyakarta.
[4] Dinata, Y. M. (2015). Ardiuno Itu Mudah. PT. Elex Media Komputindo. [5] Kadir, A. (2013). Ardiuno (Panduan
Praktis dan Pemogramannya. Penerbit
Andi:Yogyakarta
[6] Antarto, D. (2012). Interaksi Ardiuno
dan LabView. PT. Elex Media