TUGAS AKHIR
SISTEM
MONITORING
PENGUKURAN DATA ARAH
DAN KECEPATAN ANGIN MENGGUNAKAN
JARINGAN WI-FI ESP8266
Diajukan Untuk memenuhi salah satu syarat Memperoleh gelar Sarjana Teknik pada
Program Studi Teknik Elektro Jurusan Teknik Elektro
Fakultas Sains dan Teknologi Universitas Sanata Dharma
Disusun oleh: DARLES MAWARDI
NIM : 135114036
JURUSAN TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
▸ Baca selengkapnya: jaringan internet dengan kecepatan antara 35-171 kbps dan hanya cukup untuk mengirim pesan yang tidak terlalu panjang adalah jenis jaringan
(2)ii
FINAL PROJECT
THE WIND DIRECTION AND WIND SPEED
MONITORING SYSTEM USING ESP8266 WIFI
NETWORK
In a partial fulfilment of the requirement For the degree of Sarjana Teknik Departement of Electrical Engineering
Faculty of Science and Tehnology, Sanata Dharma University
DARLES MAWARDI NIM : 135114036
DEPARTEMENT OF ELECTRICAL ENGINEERING
FACULTY OF SCIENCE AND TECHONOLOGY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
vi
HALAMAN PERSEMBAHAN DAN MOTTO HIDUP
MOTTO:
Man Jadda Wa Jada
Skripsi ini
kupersembahkan kepada..…
Allah SWT yang memberikan berkah dan rahmat
Bapak, Ibu, kakak-kakak ku
Sahabatku
viii
INTISARI
Sebuah sistem monitoring pengukuran data arah dan kecepatan angin yang dapat digunakan dengan jarak jauh mampu mempermudah pengguna untuk memanatau kondisi angin tersebut, tanpa harus melihat kondisi angin di luar. Sistem monitoring pengukuran data arah dan kecepatan angin menggunakan jaringan Wi-Fi adalah salah satu solusi alternative karena saat ini banyak pengguna jaringan Wi-Fiuntuk mengakses internet dan membuat jaringan tanpa kabel baik di rumah maupun di kantor.
Sistem ini menggunakan papan Arduino Uno Rev3 untuk mengolah data sensor. Datadikirim secara nirkabel dengan menggunakan modul Wi-Fi ESP8266 seri 01. Kemudian, data akan diteima oleh penerima dan diolah pada web bwoser. Data sensor yang dikirimkan adalah sensor arah dan sensor kecepatan. Pengiriman data dilakukan setiap 2 sampai 3 detik, dan data akan ditampilkan dalam bentuk huruf dan angka pada web browser.
Sistem monitoring pengukuran data arah dan kecepatan angin menggunakan jaringan Wi-Fi ESP8266 sudah dapat diimplementasikan pada arah dan kecepatan angin tesebut. Sistem ini sudah diuji dengan kecepatan wifi 54 mbps. Dari hasil pengujian tersebut menunjukkan pengiriman dalam ruangan dapat mencapai 14 meter. Data yang diterima dari sistem pengiriman ditampilkan web browser.
ix
ABSTRACT
The wind direction and wind speed monitoring system which can be used in a long distance is able to be used by the user to monitor the air condition easily without looking at the air condition outside. The direction data calculating and speed which used Wi-Fi network is one of the alternative solutions because nowadays there are many network Wi-Fi users access the internet and make network at home or office without any cable.
This system is using Arduino Uno Rev3 board to process the sensory data. The data is sent in nirkabel way using Wi-Fi ESP8226 serial 01 module. Then, the data will be received by the receiver and be processed in the browser web. The sensory data sent is wind direction and speed sensor. The process of sending the data will be done two to three seconds and the data will be shown in the web browser in a form of letters and numbers.
The wind direction and wind speed monitoring system using ESP8226 Wi-Fi network has been able to be implemented for the direction and air. This system has been tested with 54 mbps wife speed. Based on the result, it shows that the process of sending in a room can reach 14 meters. The data received from the sending system will be shown in the web browser .
xi
DAFTAR ISI
HALAMAN JUDUL... i
HALAMAN PERSETUJUAN... iii
HALAMAN PENGESAHAN... iv
PERNYATAAN KEASLIAN KARYA... v
HALAMAN PERSEMBAHAN DAN MOTTO HIDUP... vi
LEMBAR PERNYATAAN PERSETUJUAN PUBLIKASI KARYA ILMIAH UNTUK KEPENTINGAN AKADEMIS... vii
INTISARI... viii
ABSTRACT... ix
KATA PENGANTAR... x
DAFTAR ISI... xi
DAFTAR GAMBAR... xiv
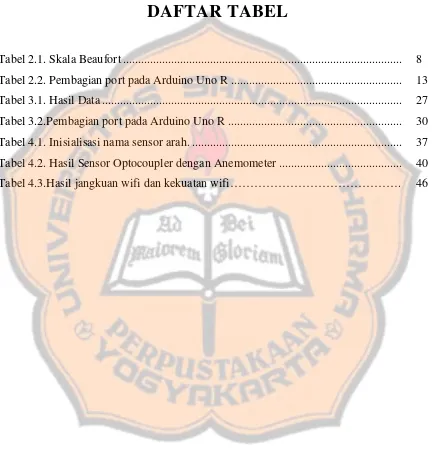
DAFTAR TABEL... xvi
BAB I PENDAHULUAN... 1
1.1. Latar Belakang... 1
1.2. Tujuan dan Manfaat... 2
1.3. Batasan Masalah ... 2
1.4. Metodologi Penelitian ... 2
BAB II DASAR TEORI... 4
2.1. Definis arah angin... 4
2.2. Dampak arah angin Penerbangan ... 5
2.3. Wind Vane... 5
2.4.Wind Cup... 6
2.5. Sensor Hall Effect A3144... 9
xii
2.6.SensorOptocoupler... 10
2.7. Komunikasi Serial ... 11
2.7.1. Kelebihan Komunikasi kanal serial ... 12
2.8. Arduino UNO R3 ... 12
2.8.1. Spesifikasi Arduino Uno R3... 13
2.9. Pemrograman Arduino IDE... 14
2.10. Komunikasi Serial Arduino ... 15
2.11. Jaringan Nirkabel... 15
2.12. Wi-Fi... 15
2.13. Wi-Fi ESP8266... 16
2.14. HTML... 17
2.15. Protocol TCP/IP... 18
2.15.1. TCP(Transmssion Control Protokol)... 19
2.16.Internet Protocol(IP) ... 19
2.17. IPAddress... 19
2.17.1. Format IP address ... 20
2.18. Web Server ... 22
2.19. Web Browser ... 23
BAB III PERANCANGAN... 26
3.1. Proses Kerja Sistem ... 26
3.2. Perancangan Perangkat Keras ... 26
3.2.1. Sensor Arah Angin ... 26
3.2.2. Sensor Kecepatan Angin ... 28
3.2.3. Arduino Uno ... 29
3.3. Perancangan Perangkat Lunak ... 31
3.3.1.Diagram alir Utama Pengiriman Data ... 31
3.3.2. Diagram Alir Subrutin Arah Angin ... 31
3.3.3. Diagram Alir Subrutin Kecepatan Angin ... 31
3.3.4. Alur Proses Koneksi dan Pengiriman Data ... 33
3.3.5.User Interface... 34
BAB IV HASIL DAN PEMBAHASAN... 35
4.1. Hasil Perancangan Handware ... 35
xiii
4.2.1.Sensor Arah Angin ... 36
4.2.2. Sensor Kecepatan Angin ... 38
4.3. Pengujian Wi-Fi ESP8266-01 ... 41
4.3.1. AT Command ... 41
4.3.2. Pemrograman ESP8266 sebagai Acces Point... 42
4.4. Tampilan data ke Web Browser ... 45
4.5. Pengujian Jangkaun Wi-Fi ... 46
4.6. Analisis kinerja perangkat secara keseluruhan ... 47
BAB V KESIMPULAN DAN SARAN... 48
5.1. Kesimpulan... 48
5.2. Saran ... 48
DAFTAR PUSTAKA... 49
LAMPIRAN
LAMPIRAN 1Pemrograman Arduino IDE... L2
xiv
DAFTAR GAMBAR
Halaman
Gambar 2.1. Wind Vane ... 6
Gambar 2.2. Wind Cup... 7
Gambar 2.3. IC 3144. ... 9
Gambar 2.4. SimbolOptocoupler... 10
Gambar 2.5. (a) Rangkaian PhototransistorCommon Emitter Amplifier. ... 11
(b) Rangkaian PhototransistorCommon Collector Amplifier... 11
Gambar 2.6. Arduino UNO Atmega328/P. ... 12
Gambar 2.7. Pin MappingAtmega 168/328... 13
Gambar 2.8. Perangkat lunak Arduino IDE Versi 1.6.8... 14
Gambar 2.9. Modul ESP8266-01. ... 16
Gambar 2.10. Pin Out Esp8266-01... 16
Gambar 2.11. Model protokol TCP/IP ... 18
Gambar 2.12. Kelas-kelas IP addres... 21
Gambar 2.13. Cara kerja web browser ... 25
Gambar 3.1. Diagram blok peracangan ... 26
Gambar 3.2. Rangkaian Sensor arah angin ... 27
Gambar 3.3. Arah mata angin... 28
Gambar 3.4. Piringanencoderdan sensoroptic... 29
Gambar 3.5.Sketsa Kecepatan angin... 29
Gambar 3.6. Tampak Atas papan Arduino Uno ... 30
Gambar 3.7. Diagram alir keseluruah proses Pemograman ... 32
Gambar 3.8. Diagram alir proses pengolahan data Arah angin... 32
Gambar 3.9. Diagram alir proses pengolahan data Kecepatan angin ... 32
Gambar 3.10. Rancangan tampilanWeb... 34
xv
Gambar 4.2. Sensor arah... 36
Gambar 4.3. Inisialisasi nama input Arduino ... 37
Gambar 4.4. Inisialisasi pin input Arduino Uno... 37
Gambar 4.5. Sensor Anemometer... 38
Gambar 4.6. inisialisasi nilai masukan dan rumus perhitungan ... 38
Gambar 4.7. Kipas Blower ... 39
Gambar 4.8. Hasil data grafik... 40
Gambar 4.9. ESP8266-01 yang terhubung secara serial dengan Arduino UNO ... 41
Gambar 4.10. Sketch Arduino IDE ESP8266-01 ... 42
Gambar 4.11. Perintah AT Command ESP8266 ... 42
Gambar 4.12. Program Arduino IDE Untuk Rutin Jika ada Refresh Web dengan Alamat 192.168.4.1 ... 43
Gambar 4.13. Respon ESP8266-01 pada Serial Monitor ... 44
Gambar 4.14. Wi-Fi ESP8266-01 terkoneksi dengan Android ... 44
Gambar 4.15. Respon pada Serial Monitor Saat Akses Web 192.168.4.1 ... 45
Gambar 4.16. Hasil Pengiriman Data Sensor pada Web Browser dengan IP 192.168.4.1... 45
Gambar 4.17. Grafik jarak(meter) dan kekuatan wifi(dBm) ... 46
xvi
DAFTAR TABEL
Tabel 2.1. Skala Beaufort ... 8
Tabel 2.2. Pembagian port pada Arduino Uno R ... 13
Tabel 3.1. Hasil Data ... 27
Tabel 3.2.Pembagian port pada Arduino Uno R ... 30
Tabel 4.1. Inisialisasi nama sensor arah. ... 37
Tabel 4.2. Hasil Sensor Optocoupler dengan Anemometer ... 40
1
BAB I
PENDAHULUAN
1.1. Latar Belakang
Angin adalah gerakan udara relatif terhadap permukaan bumi, sehingga angin merupakan udara yang bergerak diakibatkan adanya perbedaan tekanan udara dari suatu tempat ke tempat lain secara horizontal. Angin mempunyai arah dan kecepatan. Angin dapat dilihat darimana arah angin datang, contohnya dari selatan disebut angin selatan.
Anemometer dibedakan beberapa jenis alat yang dapat digunakan yaitu mengukur kecepatan angin. Anemometer adalah sebuah perangkat untuk mengukur kecepatan angin yang telah banyak dipakai dalam Meteorologi dan Geofisika. Kecepatan angin diukur dengan anemometer cup, instrument dengan tiga atau empat logam berlubang kecil yang sudah ditetapkan, sehingga dapat menangkap angin dan berputar dengan dibantu batang vertikal [1].
Cuaca ekstrim adalah fenomena yang tidak normal, cuaca tidak lazim yang dapat menimbulkan bencana, menghancurkan kehidupan sosial dan dapat menimbulkan korban jiwa manusia. Saat pergantian cuaca yang tidak normal seperti hujan badai, petir ,angin putting beliung, banjir dan longsor serta gelombang laut yang tinggi.
Melihat data dari hasil bencana alam yang terjadi selama selang periode 1815-2014 yang terjadi di wilayah Indonesia, angin puting beliung menempati urutan ke-3 terbesar. Bulan Desember 2014, telah terjadi bencana alam puting beliung di wilayah Indonesia sebanyak 52 kejadian dengan jumlah meninggal dan hilang 6 jiwa, menderita danmengungsi 1.265 jiwa, serta kerusakan rumah berat, sedang, ringan dan terendam sebanyak 3.203 unit [2].
Dari terjadinya bencana puting beliung yang sangat besar maka dari itu harus dapat diminimalisir apa bila terjadi bencana putting beliung dan juga dapat langsung di informasikan kepada masyarakat. Jika adanya bahaya angin putting beliung yang ada di sekitar lokasi tersebut.
Sistem monitoring pengukuran arah angin dan kecepatan angin merupakan proses yang sangat panjang namun memiliki waktu yang singkat dalam hal memberikan keputusan tingkat bahaya pada suatu tempat. Salah satu solusi dengan membuat suatu perangkat sistem yang efektif dan efisien untuk pengukuran arah angin dan kecepatan angin yang mampumemberikan data secarareal time.
Pada penelitian sebelumnya dilakukan oleh Wijayanti dewi, Rahmawati endah dan Sucahyo imam tentang Rancang Bangun Alat Ukur Kecepatan Dan Arah Angin Berbasis Arduino Uno Atmega328p[4]. Penelitian ini merancang dan membuat suatu Sistem monitoring pengukuran Arah angin dan Kecepatan angin. Sistem pengukuran arah angin terdiri dari sensor Hall effect A3114 dan sistem kecepatan angin terdiri dari sensor
optocoupler. Kedua alat tersebut terhubung dengan ArduinoUno Atmega 328p sebagai mikrokontroler. Sistem alat ini memanfaatkan jaringan wifi untuk mengirim data arah angin dan kecepatan angin yang dihasilkan oleh pengukuran pada suatu instrument atau alat. Untuk mengetahui informasi arah angin dan kecepatan angin, masyarakat hanya perlu membuka aplikasi browser(web) pada alat komunikasi seperti Android, laptop dan lain sebagainya yang dapat terkoneksi dengan jaringan internet (wi-fi).
1.2. Tujuan dan Manfaat
Tujuan dari penelitian ini adalah merancang suatu alat yang dapat mengukur arah angin dan kecepatan angin secarareal timeyang di control oleh Arduino Uno. Data hasil pada alat tersebut akan dikirim menggunakan jaringanWi-fi ESP8266 dan ditampilkan Android maupun laptop dengan membukaWeb(browser).
Manfaat dari penelitian ini adalah sebagai berikut.
1. Melakukan monitoring pengukuran arah angin dan kecepatan angin secara jarak jauh di sebuah lokasi.
2. Digunakan sebagai perkiraan untuk bencana alam, ramalan cuaca, dan lain sebagainya.
1.3. Batasan Masalah
Batasan masalah pada penelitian ini adalah sebagai berikut. 1. Menggunakan 8 arah mata angin.
2. Sensor yang digunakan untuk pengukuran arah angin dan kecepatan angin adalah
Hall effectA3144 danOptocoupler.
3. Arduino Uno sebagai Mikrokontroler pada sensor arah angin dan kecepatan angin. 4. Menggunakan ESP8266 sebagai jaringan Wi-Fi
5. Android maupun laptop hanya dapat meliputi pengukuran data arah angin dan kecepatan angin secarareal time.
1.4. Metodelogi Penelitian
Berdasarkan pada tujuan yang di ingin dicapai metode-metode yang digunakan dalam penyusunan tugas akhir ini adalah.
1. Membaca buku-buku dan jurnal-jurnal yang berkaitan dengan permasalahan yang dibahas dalam tugas akhir ini.
2. Sumber informasi bedasarkan data atau arsip yang telah ada sehingga dapat membantu penulis dalam mengerjakan tugas akhir ini.
3. Langsung melakukan praktek maupun pengujian terhadap hasil pembuatan alat dalam pembuatan tugas akhir ini.
4. Proses pengambilan data. Pengambilan data dilakukan dengan cara melihat data yang tertampil di serial monitor dari sensor arah angin dan sensor kecepatan angin dan akan memanfaatkan jaringan internet (Wi-Fi ESP8266) untuk mengirim data, selajutnya menampilkan hasil data dengan cara membuka aplikasi browser (web) pada Android maupun laptop. Data yang diambil adalah arah angin dan kecepatan angin.
4
BAB II
DASAR TEORI
2.1. Definisi Arah Angin
Penyebutan Arah angin menggunakan arah mata angin, seperti arah utara berarti angin utara yang berhembus dari utara ke selatan dan arah timur berarti angin timur yang berhembus dari timur ke barat. Arah angin diukur menggunakan derajat dengan searah
jarum jam di mulai dari ° dan ° yaitu utara dan ° sebagaitimur laut, ° sebagai timur, ° sebagai tenggara , ° sebagai selatan, ° sebagai barat daya, ° sebagai barat, ° sebagai barat laut.
Angin merupakan aliran udara dalam jumlah yang besar yang timbul akibat adanya rotasi bumi, perbedaan suhu dan perbedaan tekanan udara antara dua tempat dengan kecepatan yang dinamis dan fluktatif. Atau bisa juga disebut sebagai perpindahan massa udara dari satu tempat ke tempat lakinnya secara horizontal atau hampir horizontal. Pengaruh perputaran bumi terhadap angin disebut dengan pengaruh carioles (carioles effect). Efek ini menyebabkan angin bergerak searah jarum jam mengitari daerah bertekanan rendah di belahan bumi selatan sebaliknya bergerak berlawanan arah jarum jam mengitari daerah bertekanan rendah di bumi utara[5].
Berikut beberapa fungsi angin :
1. Membantu dalam proses penyerbukan bunga
2. Mengontrol kincir angin atau menjalankan pembangkit listrik tenaga angin 3. Mempercepat pendinginan dari benda yang panas
4. Mencampur lapisan udara antara panas dan dingin, lembab dan dingin serta kaya akan CO2 dan CO2 rendah
5. Membantu mengamati cuaca dalam ilmu meteorologi dan klimatologi
2.2. Dampak Arah angin dalam Penerbangan
Peran cuaca dalam penerbangan sangat besar yaitu informasi cuaca mempunyai andil dalam peningkatan efisiensi dan efektivitas kegiatan, keselamatan penerbangan. Selain itu cuaca mempunyai potensi yang membahayakan harta dan jiwa. Namun dengan demikian tidak mudah untuk mengatakan cuaca mana yang dapat membahayakan, karena dampak cuaca bergantung pula kepada faktor lain. Khususnya dalam penerbangan, selain kadar atau intensitas unsur cuaca, jenis pesawat, kondisi pesawat, dan posisi penerbangan juga faktor yang menentukan sensitifitasnya terhadap cuaca. Misalnya angin silang (cross wind) di landasan terbang yang berkecepatan 20 knot, mungkin dapat menimbulkan bahaya bagi pesawat kecil yang melakukan pendaratan, tetapi tidak ada pengaruhnya bagi pesawat besar dan modern[6]. Dengan demikian, setiap pesawat terbang mempunyai tiga kegiatan yang sama yakni lepas landas, terbang, dan mendarat, maka penggunaan arti bahaya dalam penerbangan umumnya diterapkan untuk masing-masing kegiatan tersebut.
Arah landasan pacu dapat ditentukan dengan menggunakan analisis arah angin(windrose analiysis). Penentuan arah landas pacu yang dipersyaratkan oleh ICAO merupakan arah landas pacu sebuah bandar udara harus diorientasikan sehingga pesawat udara dapat mendarat dan lepas landas paling sedikit 95% dari seluruh komponen angin yang bertiup. Adapun besarnya batas kecepatan komponen angin silang (cross wind) yang diijinkan adalah 10 knot untuk bandar udara dengan panjang landas pacu kurang dari 1200 m, sebesar 13 knot untuk bandara dengan panjang landas pacu 1200 – 1500 m, dan kecepatan angin silang 20 knot diijinkan untuk bandara dengan panjang landas pacu lebih dari atau sama dengan 1500 m.Tolerasi variasi arah landas pacu yang diijinkan adalah dengan memperhatikan usability factor tahunan menurut hasil windrore analysis adalah sama atau lebih besar dari 95%.
2.3.
Wind Vane
Gambar 2.1 Wind Vane Cara kerja:
1. Angin akan menggerakkan lembar logam indikator kecepatan membentuk penyimpangan ke arah horizontal. Besarnya penyimpangan tersebut tegantung dari besarnya tenaga aliran udara atau hembusan angin.
2. Membaca kecepatan angin yang terjadi pada skala kecepatan angin.
3. Membaca arah angin dari wind vane dimana ujung depan(terdapat bola besi) adalah menunjukkan arah datangnya angin yang yang dapat diartikan sebagai arah angin.
2.4.
Wind Cup
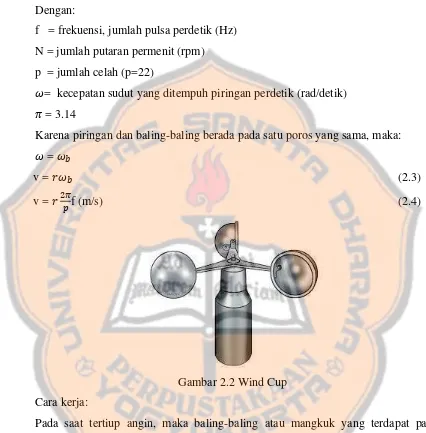
Wind Cup(Anemometer) merupakan alat yang digunakan untuk mengukur kecepatan angin. Jenis anemometer yang biasa digunakan adalah anemometer mangkok dan baling-baling. Anemometer mangkok umumnya digunakan di stasiun meteorologi yang digunakan untuk mengamati keadaan cuaca. Angin yang menggerakkan mangkok membuat anemometer berputar. Selain anemometer dengan propeller (mangkok), jenis anemometer yang lebih modern yaitu anemometer digital. Gambar 2.2 menunjukkan Wind Cup(Anemometer).
Rumus Kecepatan linier angin di ukur melalui persamaan:
V =��� (2.1)
Dimana:
V = kecepatan linier (m/s)
�� = Kecepatan sudut baling-baling (rad/s)
Dengan banyaknya pulsa dihitung dalam satuan waktu maka: � = 2��
60 (2.2)
Dengan:
f = frekuensi, jumlah pulsa perdetik (Hz) N = jumlah putaran permenit (rpm) p = jumlah celah (p=22)
�= kecepatan sudut yang ditempuh piringan perdetik (rad/detik) � = 3.14
Karena piringan dan baling-baling berada pada satu poros yang sama, maka: � = ��
v = ��� (2.3)
v = �2�
�f (m/s) (2.4)
Gambar 2.2 Wind Cup Cara kerja:
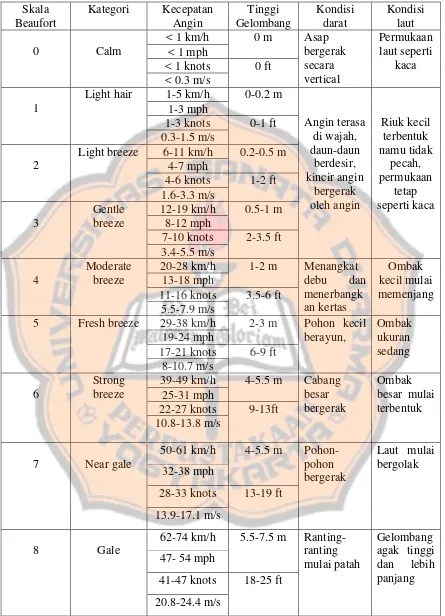
Pada saat tertiup angin, maka baling-baling atau mangkuk yang terdapat pada anemometer akan bergerak sesuai dengan arah mata angin. Semakin besar kecepatan angin meniup, maka semakin cepat pula perputaran dari baling-baling tersebut.Berdasarkan jumlah perputaran per detiknya, maka akan diketahui jumlah dari kecepatan anginnya.Pada anemometer terdapat bagian alat pencacah yang berfungsi menghitung jumlah kecepatan angin. Hasilnya akan dicatat, kemudian akan disesuaikan dengan Skala Beaufort
Tabel 2.1 Skala Beaufort Skala
Beaufort
Kategori Kecepatan Angin Tinggi Gelombang Kondisi darat Kondisi laut
0 Calm
< 1 km/h 0 m Asap bergerak secara vertical Permukaan laut seperti kaca < 1 mph
< 1 knots 0 ft < 0.3 m/s
1
Light hair 1-5 km/h 0-0.2 m
Angin terasa di wajah, daun-daun berdesir, kincir angin bergerak oleh angin Riuk kecil terbentuk namu tidak pecah, permukaan tetap seperti kaca 1-3 mph
1-3 knots 0-1 ft 0.3-1.5 m/s
2
Light breeze 6-11 km/h 0.2-0.5 m 4-7 mph
4-6 knots 1-2 ft 1.6-3.3 m/s
3
Gentle breeze
12-19 km/h 0.5-1 m 8-12 mph
7-10 knots 2-3.5 ft 3.4-5.5 m/s
4
Moderate breeze
20-28 km/h 1-2 m Menangkat debu dan menerbangk an kertas Ombak kecil mulai memenjang 13-18 mph
11-16 knots 3.5-6 ft 5.5-7.9 m/s
5 Fresh breeze 29-38 km/h 2-3 m Pohon kecil berayun,
Ombak ukuran sedang 19-24 mph
17-21 knots 6-9 ft 8-10.7 m/s
6
Strong breeze
39-49 km/h 4-5.5 m Cabang besar bergerak
Ombak besar mulai terbentuk 25-31 mph
22-27 knots 9-13ft 10.8-13.8 m/s
7 Near gale
50-61 km/h 4-5.5 m Pohon-pohon bergerak
Laut mulai bergolak 32-38 mph
28-33 knots 13-19 ft 13.9-17.1 m/s
8 Gale
62-74 km/h 5.5-7.5 m Ranting-ranting mulai patah
Gelombang agak tinggi dan lebih panjang 47- 54 mph
41-47 knots 18-25 ft
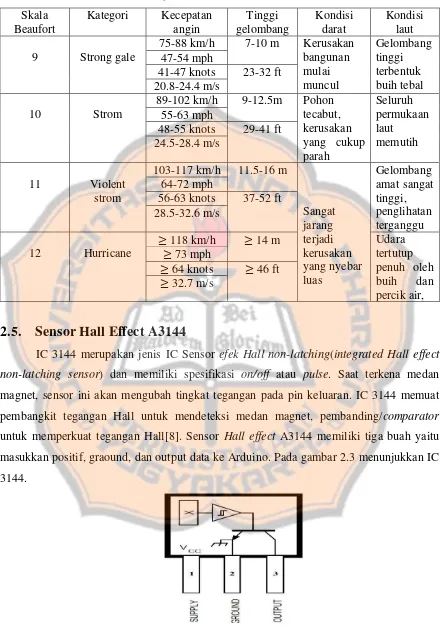
Lanjutan Tabel Skala Beaufort Skala
Beaufort
Kategori Kecepatan angin Tinggi gelombang Kondisi darat Kondisi laut
9 Strong gale
75-88 km/h 7-10 m Kerusakan bangunan mulai muncul Gelombang tinggi terbentuk buih tebal 47-54 mph
41-47 knots 23-32 ft 20.8-24.4 m/s
10 Strom
89-102 km/h 9-12.5m Pohon tecabut, kerusakan yang cukup parah Seluruh permukaan laut memutih 55-63 mph
48-55 knots 29-41 ft 24.5-28.4 m/s
11 Violent
strom
103-117 km/h 11.5-16 m
Sangat jarang terjadi kerusakan yang nyebar luas Gelombang amat sangat tinggi, penglihatan terganggu 64-72 mph
56-63 knots 37-52 ft 28.5-32.6 m/s
12 Hurricane
≥ 118 km/h ≥ 14 m Udara
tertutup penuh oleh buih dan percik air, ≥ 73 mph
≥ 64 knots ≥ 46 ft ≥ 32.7 m/s
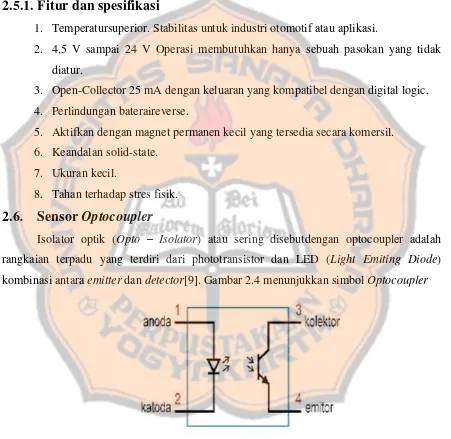
2.5. Sensor Hall Effect A3144
IC 3144 merupakan jenis IC Sensor efek Hall non-latching(integrated Hall effect non-latching sensor) dan memiliki spesifikasi on/off atau pulse. Saat terkena medan magnet, sensor ini akan mengubah tingkat tegangan pada pin keluaran. IC 3144 memuat pembangkit tegangan Hall untuk mendeteksi medan magnet, pembanding/comparator
untuk memperkuat tegangan Hall[8]. Sensor Hall effect A3144 memiliki tiga buah yaitu masukkan positif, graound, dan output data ke Arduino. Pada gambar 2.3 menunjukkan IC 3144.
Dimana kondisi yang diambil untuk mendapat data arah angin adalah saat sensor mengenai sensor Hall Effect.Sensor Hall effect akan mengalami kondisi low saat mengenai magnet dan kondisi high saat sensor Hall effect tidak mengenai magnet.Hasil keluaran dari sensor ini berupa digital, jadi tidak memerlukan converter ADC untuk menghasilkan keluaran digital.
2.5.1. Fitur dan spesifikasi
1. Temperatursuperior. Stabilitas untuk industri otomotif atau aplikasi.
2. 4,5 V sampai 24 V Operasi membutuhkan hanya sebuah pasokan yang tidak diatur.
3. Open-Collector 25 mA dengan keluaran yang kompatibel dengan digital logic, 4. Perlindungan bateraireverse.
5. Aktifkan dengan magnet permanen kecil yang tersedia secara komersil. 6. Keandalan solid-state.
7. Ukuran kecil.
8. Tahan terhadap stres fisik.
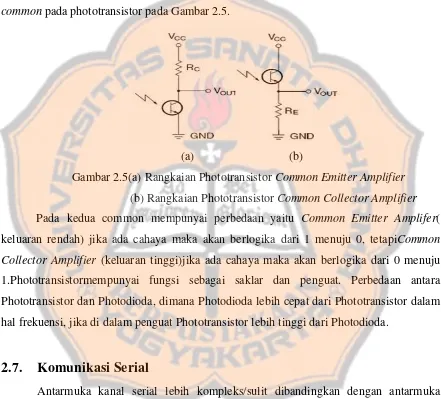
2.6
.
Sensor
Optocoupler
Isolator optik (Opto – Isolator) atau sering disebutdengan optocoupler adalah rangkaian terpadu yang terdiri dari phototransistor dan LED (Light Emiting Diode) kombinasi antara emitter dan detector[9]. Gambar 2.4 menunjukkan simbol Optocoupler
Gambar 2.4 Simbol Optocoupler
Prinsip kerja Phototransistor :Jika antara Photodioda dan LED terhalang maka akan off sehingga berlogika high. dan sebaliknya jika anatra photodioda dan LED tidak terhalang maka akan on sehingga berlogika low.
Pada umumnya prinsip kerja phototransistor hampir sama dengan transistor. Arus pada transistor dikalikan untuk memberi arus pada kolektor. Phototransistor juga memiliki arus dapat dikendalikan oleh jumlah cahaya yang diterima, karena phototransistor mempunyai dua kaki yaitu kolektor dan emitor. Terdapat macam-macam konfigurasi
common pada phototransistor pada Gambar 2.5.
(a) (b)
Gambar 2.5(a) Rangkaian Phototransistor Common Emitter Amplifier
(b) Rangkaian Phototransistor Common Collector Amplifier
Pada kedua common mempunyai perbedaan yaitu Common Emitter Amplifer( keluaran rendah) jika ada cahaya maka akan berlogika dari 1 menuju 0, tetapiCommon Collector Amplifier (keluaran tinggi)jika ada cahaya maka akan berlogika dari 0 menuju 1.Phototransistormempunyai fungsi sebagai saklar dan penguat. Perbedaan antara Phototransistor dan Photodioda, dimana Photodioda lebih cepat dari Phototransistor dalam hal frekuensi, jika di dalam penguat Phototransistor lebih tinggi dari Photodioda.
2.7. Komunikasi Serial
Antarmuka kanal serial lebih kompleks/sulit dibandingkan dengan antarmuka melalui kanal parallel[10]. Hal ini disebabkan oleh:
1. Perangkat keras: Adanya proses konversi data pararel menjadi serial atau sebaliknya menggunakan piranti tambahan yang disebut UART(Universal Asynchronous Receiver/Transmitter).
2.7.1. Kelebihan Komunikasi kanal serial
Di sisi lain, antarmuka kanal serial menawarkan berapa kelebihan dibandingkan kanal paralel, antara lain;
1. Kabel untuk komunikasi serial bisa lebih panjang dibandingkan denganparalel, sehingga menyebakan gangguan pada kabel-kabel panjang labih mudah di atasi pada komunikasi kanal.
2. Jumlah kabel serial lebih sedikit,karena hanya menggunakan 3 kabel yang terdiri dari TXD (Saluran kirim),RXD (Saluran peneriman), dan Ground.
3. Banyaknya piranti saat ini menggunakan teknologi infra merah untuk komunikasi data, hal ini peringirim data menggunakan komunikasi serial.
4. Untuk teknologi embedded sistem, banyak mikrokontroler yang dilengkapi dengan komunikasi serial atau Serial Communication Interface (SCI).
2.8. Arduino UNO R3
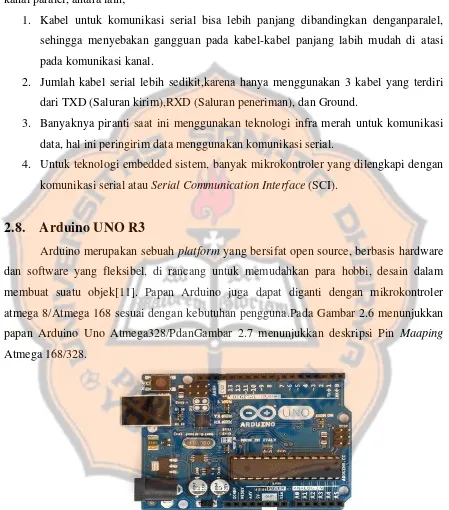
Arduino merupakan sebuah platform yang bersifat open source, berbasis hardware dan software yang fleksibel, di rancang untuk memudahkan para hobbi, desain dalam membuat suatu objek[11]. Papan Arduino juga dapat diganti dengan mikrokontroler atmega 8/Atmega 168 sesuai dengan kebutuhan pengguna.Pada Gambar 2.6 menunjukkan papan Arduino Uno Atmega328/PdanGambar 2.7 menunjukkan deskripsi Pin Maaping
Atmega 168/328.
Gambar 2.7Pin Mapping Atmega 168/328[12]
2.8.1. Spesifikasi Arduino Uno R3
Arduino UNO adalah sebuah board mikrokontroler yang didasarkan pada ATmega328 Arduino UNO mempunyai 14 pin digital input/output (6 sebagai output PWM), 6 input analog, 16 MHz osilator Kristal, terdapat koneksi USB, power jack, ICSP header, dan tombol reset[13]. Papan arduino uno memiliki beberapa pin diantaranya: Serial pin 0 dan 1, external intterups pin 2 dan 3, PWM di pin 3, 5, 6, 9, dan 11, SPI pin 10, 11, 12, LED pin 13, dan TWI pin A4 dan A5. Ketika LED pin 13 berkedip bahwa arduino di aktifkan dan saat di reset maka pin 13 juga akan berkedip. Terdapat fungsi pada tiap pin diantaranya dan pada tabel 2.2 menunjukkan Karakteristik papan Arduino Uno.
Serial: terdapat di pin 0(Rx) dan 1(Tx), digunakan untuk menerima dan mengirim serial data yang berupa tegangan TTL (5V dan 0V).
Ekternal interrupt: terdapat di pin 2 dan pin 3 yang digunakan untuk interupsi baik itu rising atau falling edge.
Pin 3, 5, 6, 9, 10, dan 11: untuk mengatur PWM(Pulse Width Modulator). Keluaran berupa 8 bit PWM.
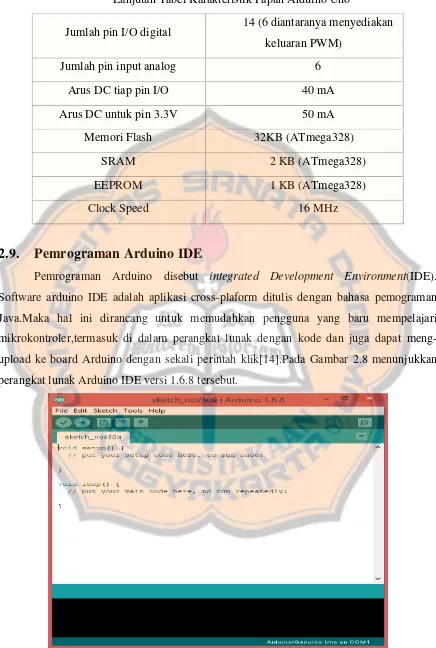
Pin A4 dan A5: berupa Serial Data(SDA) dan Serial Clock(SCL). Tabel 2.2. Karakteristik Papan Arduino Uno
Mikrokontroler ATmega328
Teganga pengoperasian 5V
Tegangan input yang disarankan 7-12V
Lanjutan Tabel Karakteristik Papan Arduino Uno
Jumlah pin I/O digital 14 (6 diantaranya menyediakan keluaran PWM)
Jumlah pin input analog 6
Arus DC tiap pin I/O 40 mA
Arus DC untuk pin 3.3V 50 mA
Memori Flash 32KB (ATmega328)
SRAM 2 KB (ATmega328)
EEPROM 1 KB (ATmega328)
Clock Speed 16 MHz
2.9. Pemrograman Arduino IDE
Pemrograman Arduino disebut integrated Development Environment(IDE). Software arduino IDE adalah aplikasi cross-plaform ditulis dengan bahasa pemograman Java.Maka hal ini dirancang untuk memudahkan pengguna yang baru mempelajari mikrokontroler,termasuk di dalam perangkat lunak dengan kode dan juga dapat meng-upload ke board Arduino dengan sekali perintah klik[14].Pada Gambar 2.8 menunjukkan perangkat lunak Arduino IDE versi 1.6.8 tersebut.
Perangkat lunak Arduino IDE di lengkapi dengan library C/C++, dan membuat operasi input/output jauh lebih dipahami.Pengguna hanya perlu mendifinisikan dua fungsi untuk membuat program yang dapat di jalankan pada papan Arduino Uno R3. Fungsi di antaranya:
1. Setup() berfungsi berjalan satu kali pada awal dari sebuah program yang dapat menginisialisasi masukkan dan keluaran pada papan Arduino.
2. Loop() berfungsi menon-aktifkan pada papan Arduino Uno R3 saat di eksekusi.
2.10. Komunikasi Serial Arduino
Komunikasi Serial Arduino Uno R3 menggunakan 2 buah pin serial 0(Rx) dan 1(Tx) pada papan Arduino Uno R3 yang terhubung Atmega328. Komunikasi ini disediakan UART atau USART TTL (5volt).Papan Arduino Uno R3 dilengkapi dengan Atmega16U2 yang memungkinkan pada komunikasi serialnya melalui USB dan muncul sebagai Com Port Virtual untuk perangkat lunak pada komputer. Firmware Arduino menggunakan USB driver standar COM, dan tidak ada driver eksternal. Perangkat lunak Arduino termasuk serial monitor yang memungkinkan data sederhana yang akan dikirim ke papan arduino. Led Rx dan Tx pada papan Arduino Uno akan berkedip ketika data sedang dikirim melalui chip USB-toserial dan koneksi USB ke komputer. Atmega328 juga mendukung komunikasi I2C dan SPI[13].
2.11. Jaringan Nirkabel
Jaringan nirkabel merupakan suatu jaringan yang menghubungkan dua piranti untuk bertukar data tanpa media kabel, data pertukaran melalui gelombang cahaya atau gelombang radio dengan frekuensi tertentu(Seperti Bluetooth pada laptop dan Hp) dan bekerja pada frekuensi 2.4 GHz(802.11 b/g) atau 5GHz(802.11 a) yang dapat digunakan untuk memehuni kebutuhan. Jaringan nirkabel memilki beberapa kegunaan, misalnya pengguna bergerak dapat menggunakan telepon seluler untuk mengakses e-mail dan untuk pengguna laptop bisa terhubung ke internet ketika di Ketera Api, kafe dan lainnya.
2.12. Wi-Fi
data dengan cepat dan aman. Wi-Fi tidak hanya dapat digunakan untuk mengakses internet, Wi-Fi juga dapat digunakan untuk membuat jaringan tanpa kabel baik di rumah maupun di kantor-kantor dan pusat-pusat bisnis.Oleh karena itu banyak orang mengasosiasikan Wi-Fi dengan “Kebebasan” karena teknologi Wi-Fi memberikan kebebasan kepada pemakainya untuk mengakses internet atau mentransfer data dari ruang meeting, kamar hotel, kampus, dan café-café.
2.13. Wi-Fi ESP8266
ESP8266 adalah sebuah modulSystem on Chip(SOC) yang memiliki kapabilitas untuk terhubung dengan jaringan WIFI. ESP8266 memiliki firmware dan set AT Command yang bisa diprogram dengan Arduino IDE.GPIO (General Port Input Ouput) berfungsi mengakses pada sensor atau dihubungkan dengan Arduino, sehingga memberikan kemampuan tambahan ke Arduino untuk bisa terhubung ke Wifi[15]. Kelebihan ESP8266 adalah memilki DEEP SLEEP MODE, sehingga penggunaan daya akan relatif jauh lebih efisien. Ada beberapa tipe ESP8266 yaitu terdiri dari ESP8266-01 sampai ESP-12. ESp8266-01 memiliki beberapa pin yang terdiri dari Ground, UTXD, CH_PD, GPI02, GPI00, RST, VCC, URXD. Gambar 2.9 Menunjukkan Modul ESP-01dan Gambar 2.10 Menunjukan pin Out Esp8266.
Gambar 2.9 Modul ESP8266-01
Karakteristik ESP8266-01
1. 802.11 b/g/n.
2. Daya rendah 32-bit MCU terpadu.
3. 10-bit ADC terpadu.
4. TCP / IP protocol stack terpadu.
5. Saklar TR, balun, LNA, power amplifier dan matching network terpadu.
6. PLL, regulator, dan unit manajemen daya terpadu.
7. Mendukung keragaman antena.
8. Wi-Fi 2,4 GHz, mendukung WPA / WPA2.
9. Mendukungan mode operasi STA / AP / STA + AP.
10. Mendukungan fungsi smart link untuk kedua perangkat android dan iOS.
11. SDIO 2.0, (H) SPI, UART, I2C, I2S, IR Remote Control, PWM, GPIO.
12. STBC, 1 × 1 MIMO, 2 × 1 MIMO.
13. A-MPDU & A-MSDU agregasi & 0.4s guard interval.
14. Daya deep sleep<10uA, daya kebocoran arus <5uA.
15. Paket membangunkan dan mengirimkan<2ms. 16. Konsumsi daya standby<1.0mW (DTIM3).
17. +20 dBm daya keluaran dalam mode 802.11b.
18. Kisaran suhu operasi 40C ~ 125C.
19. FCC, CE, TELEC, Wi-Fi Alliance, dan SRS yang terjamin.
2.14. HTML
1. Elemen<head>
bagian head merupakan bagian kepala, tempat untuk menuliskan keterangan mengenai judul halaman web dan dokumen lainnya.
2. Elemen <body>
body merupakan bagian badan atau isi, tempat untuk menuliskan informasi yang akan ditampilkan pada browser.
2.15. Protocol TCP/IP
TCP merupakan protocol yang didesain untuk melakukan fungsi-fungsi komunikasi data pada jaringan komputer (LAN/WAN). Protokol TCP/IP menjadi protokol komunikasi data yang fleksibel dan dapat dengan mudah diterapakan di setiap komputer dan interface jaringan[16].Gambar 2.11 menunjukkan Model protokol TCP/IP.
Gambar 2.11 Model protokol TCP/IP
Pada gambar di atas merupakan layer yang terdiri dari:
1. Network link (Interface layer),layer ini bertanggung jawab pengiriman dan meneriman data dari media fisik(kabel, serat optik, gelombang radio). 2. Network(Internet layer), Protokol dalam layer bertanggung jawab dalam
Protokol), ICMP (Internet Control Message Protokol).DHCP (Dynamic Configuration Protokol).
3. Transport layer, Protokol yang bertanggung jawab untuk mengadakan komunikasi antara dua komputer. Pada layer ini terdapat dua protokol yaitu :TCP (Transmission Control Protokol), UDP (Unser Datagram Protokol).
4. Aplication layer, pada layer terdapat aplikasi menggunakan Protokol TCP/IP.
2.15.1. TCP
(Transmssion Control Protokol)
TCP merupakan protokol yang bersifat connection oriented, reliable, byte stream service.Connection oriented artinya sebelum proses tranmisi data terjadi, dua aplikasi TCP harus melakukan pentukaran informasi. Reliablemenerapkan fitur deteksi kesalahan dan tetransmisi. Sedangkan byte stream service artinya paket akan dikirimkan ke tujuan secara berurutan.
2.16.
Internet Protocol
(IP)
Internet Protokol merupakan suatu address atau alamat dari sebuah user atau pengguna yang berfungsi sebagai pengirim paket data ke alamat yang tepat, Oleh karena itu Internet Protokol memegang peranan yang sangat penting dari jaringan TCP/IP. Karena semua aplikasi jaringan TCP/IP pasti bertumpu kepada Internet Protocol agar dapat berjalan dengan baik[17]. IP protocol mempunyai beberapa karakteristik, anatra lain:
a. Unreliable
Internet Protokol tidak menjamin datagram yang dikirm pasti sampai ke tempat tujuan, namun protokol internet hanya melakukan usaha sebaik mungkin untuk mengirimkannya.
b. Connectiorless
Dalam proses pengiriman paket datagram dari tempat asal tujuan, pengirim dan penerima tidak melakukan perjajian terlebih dahulu.
2.17.
IP Address
bit digunakan untuk alamat IP address versi IPv4 dan pada angka 128 bit digunakan untuk
IP address versi IPv6 untuk menunjukan dalam dari komputer pada jaringan intenet berbasis TCP/IP[18]. Ada beberapa jenis IP Addres, antara lain:
a. IPv4
IPv4 terdiri dari 32 bit yang bisa menampung seluruh host di dunia atau melebihi 4 milyar host.
b. IPv6
IPv6berbeda dengan IPv4, dikarenakanIPv6 mempunyai 128 bit yang lebih besar 4 kali lipat dari 4 milyar host.
2.17.1. Format IP address
Sebenarnya pengalamatan IP address menggunakan bilangan biner. Namun supaya lebih mudah ditulis dan dibaca oleh manusia, maka IP address ditulis dengan bilangan 4 desimal yang masing-masing dipisahkan oleh titik.Format penulisan ini disebut sebagai dotted-decimal notation. Setiap bilangan desimal merupakan nilai dari satu oktet atau delapan bit alamat IP. Sebagai contoh adalah sebagai berikut:
192.168.1.1
Jika dikonversi menjadi bilangan biner adalah sebagai berikut: 11000000.10101000.1.1 Kelas IP address:
IP address dikelompokan dalam lima kelas, yaitu kelas A, B, C, D, dan E. Perbedaannya terletak pada ukuran dan jumlah, IP address kelas A jaringan IP address Kelas B digunakan untuk jaringan berukuran besar dan sedang. IP address Kelas C untuk pembagian jaringan yang banyak, namun masing-masing jaringan memiliki anggota yang sedikit. IP address Kelas D dan E juga didefinisikan, tetapi tidak digunakan dalam penggunaan normal, kelas D diperuntukan bagi jaringan multicast, dan E untuk Eksperimental.
Gambar 2.12 Kelas-kelas IP addres A. Kelas A
Format : 0nnnnnnn.hhhhhhhh.hhhhhhhh.hhhhhhhh Bit Pertama : 0
Panjang Net ID : 8 bit (1oktet) Panjang Host ID : 24 bit (3 oktet) Byte pertama : 0 127
Jumlah : 126 kelas A (o dan 127 dicadangkan) Range IP : 1.xxx.xxx.xxx.sampai 126.xxx.xxx.xxx Jumlah IP : 16.777.214 IP address pada setiap kelas A B. Kelas B
Format : 10nnnnnn.nnnnnnnn.hhhhhhhh.hhhhhhhh 3 bit pertama : 110
Panjang NetID : 24 bit Panjang Host ID : 8 bit Byte pertama : 192 - 223
Range IP : 192.0.0.xxx sampai 223.255.255.xxx Jumlah IP : 254 IP address pada setiap kelas B C. Kelas C
Format : 110nnnnn.nnnnnnnn.nnnnnnnn.hhhhhhhh 3 bit pertama : 110
Range IP : 192.0.0.xxx sampai 255.255.255.xxx Jumlah IP : 254 IP address pada tiap kelas C D. Kelas D
Format : 1110mmmm.mmmmmmmm.mmmmmmmm.mmmmmmmm 4 Bit pertama : 1110
Bit multicast : 28 bit Byte Inisial : 224-247
Deskripsi : Kelas D adalah ruang alamat multicast E. Kelas E
Format : 1111rrr.rrrrrrrr.rrrrrrrr.rrrrrrrr 4 bit pertama : 1111
Bit cadangan : 28 bit Byte inisial : 248-255
Deskripsi : Kelas E adalah ruang alamat yang dicadangkan untuk keperluan eksperimental
2.18. Web Server
Web server merupakan sebuah perangkat lunak yang bertanggung jawab untuk menerima permintaan HTTP dari klien yang dikenal sebagai web browser, konten yang diolah dan ditampilkan umumnya dalam bentuk HTML yang berisi teks, gambar, suara, dan jenis data lainnya.Web server juga dikenal dengan istilah Hypertext Transfer Protocol Daemon (HTTPD) atau HTTP server[19]. Web server juga mempunyai batas kapasitas tertentu.Hal ini disebabkan karena hanya bisa menangani sejumlah koneksi tertentu pada saat bersamaan dari sebuah klien untuk setiap alamat IP.
Fungsi Web Server:
Fitur-fitur standar web server adalah :
1. HTTP
2. Logging
3. Virtual Hosting
4. Pengaturan Bandwidth
5. Otektifikasi
6. Kompresi Konten
7. HTTPS
HTTP (Hypertext Transfer Protocol) adalah protokol yang digunakan oleh web server dan web browser untuk dapat berkomunikasi antara satu sama lain. Sedangkan HTTPS (Hypertext Transfer Protocol Secure) adalah merupakan versi aman (secure) dari HTTP.Protokol HTTP menggunakan port 80 dan protokol HTTPS menggunakan port 443. Cara kerja Web Server:
Pada saat client (browser) meminta data web page kepada server, instruksi permintaan data oleh browser tersebut akan dikemas di dalam TCP yang merupakan protokol transport dan dikirim ke alamat Hyper Text Transfer Protocol (HTTP) dan atau Hyper Text Transfer Protocol Secure (HTTPS). Data yang diminta dari browser ke web server disebut dengan HTTP request yang kemudian akan dicarikan oleh web server di dalam komputer server. Jika ditemukan, data tersebut akan dikemas oleh web server dalam TCP dan dikirim kembali ke browser untuk ditampilkan. Data yang dikirim dari server ke browser dikenal dengan HTTP response. Jika data yang diminta oleh browser tersebut ternyata tidak ditemukan oleh web server, maka web server akan menolak permintaan tersebut dan browser akan menampilkan notifikasi error 404 atau Page Not Found.
2.19. Web Browser
Fungsi Web Browser:
A. Caching
Berfungsi untuk mereduksi pengguna bandwith.
B. Authentication
Authentication adalah proses verifikasi untuk memastikan keamanan jaringan di perangkat nirkabel agar kompatibel dan sesuai dengan jaringan nirkabel operator seluler.
C. State High Maintenance
State High Maintenance adalah sebuah mekanisme untuk memastika bahwa web browser tetap stabil.
D. Requsting supporting data item
Berfungsi untuk meminta item yang mendukung data yang diminta oleh user.
E. Tacking action in reponses to other header and status code
Jika dalam mengujungi suatu situs, komputer akan meminta data dari server melalui HTTP. Sebelum halaman yang diminta akan ditampilkan dalam browser, web server akan mengirimkan header HTTP yang memiliki kode status. Kode status merupakan penyedia informasi tentang status permintaan.
F. Rending complex object
Rending complex object adalah proses pengumpulan semua yang ada dalam halaman web serta efek-efek yang ada didalamnya.
G. Dealing with error condition
Handing atau penangan error yang terjadi.
Cara Kerja Web Browser:
client dan web server harus terhubung dan memiliki IP address, tujuannya agar pengiriman permintaan web file dan mengirimkan permintaan kembali tidak mengalami salah address. Gambar 2.13 menunjukkan cara kerja web browser
26
BAB III
RANCANGAN PENELITIAN
3.1. Proses Kerja Sistem
Gambar 3.1 Diagram blok peracangan
Pada Gambar 3.1 menunjukkan Diagram blok perancangan. Alat ukur ini terdiri dari dua buah sensor yaitu untuk alat penunjuk arah angin menggunakan sensor Hall Effect
A3144 dan untuk alat mengukur kecepatan angin menggunakan sensor optocoupler. Sensor Hall Effect terdapat IC berjumlah 8 buah, setiap sensor akan terbaca bila sirip bekerja saat terkena angin dan menghasilkan kondisi high atau low, kemudian dibaca dan diolah di dalam Arduino Uno. Sensor optocoupler akan ikut berputar sesuai dengan putaran wind cup dan akan menghasilkan pulsa, kemudian dibaca dan diolah di dalam Arduino Uno.
Hasil semua data akan diolah di Arduino IDE kemudian dikirim menggunakan modul wi-fi ESP8266, dan akan menampilkan data yang diterima ke Android maupun laptop dengan cara membuka browser (Web).
3.2. Perancangan Perangkat Keras
3.2.1. Sensor Arah Angin
Pada sistem pembacaan arah mata angin menggunakan komponen IC 3144 dan resistor 10 kOhm. Dalam IC 3144 dan resistor ini akan diolah di dalam Arduino Uno
Wind vane
Wind cup
Sensor Hall Effect A3144
Sensor Optocoupler
Android/ laptop Arduino
Uno R
berupa tegangan masukkan 5 V dan ground dan 8 output. Gambar 3.2 Menunjukkan Rangkaian Sensor arah angin.
Gambar 3.2 Rangkaian Sensor arah angin
Pada saat sensor arah angin terkena hembusan angin maka sensor arah angin akan bergerak dan mendeteksi atau menunjukkan arah angin yang diinginkan. Sensor arah angin akan menghasilkan pulsa digital TTL yaitu yang berlogika “0” atau “1”. Jikasaat “0” tidak akan mendeteksi dan sebaliknya jika saat “1” akan mendeteksi.
Tabel 3.1 Hasil Data
Derajat U TL T TG S BD B BL
0 1 0 0 0 0 0 0 0
45 0 1 0 0 0 0 0 0
90 0 0 1 0 0 0 0 0
135 0 0 0 1 0 0 0 0
Lanjutan Tabel Hasil Data
Derajat U TL T TG S BD B BL
225 0 0 0 0 0 1 0 0
270 0 0 0 0 0 0 1 0
315 0 0 0 0 0 0 0 1
PadaTabel 3.1 menunjukkan hasil data.Dimana tata letak 8 IC 3144 dan resisitor 10kohm makan dibuat untuk 8 arah angin yaitu: utara, timur laut, timur, tenggara, selatan, barat daya, barat, barat laut dan jarak tiap-tiap sensor sekitar 3 cm danlebar magnet 1 cm, jik asaat magnet ditengah antara sensor maka sensor akan mendeteksi sebelumnya. Letak sensor tersebut mengikuti sudut arah mata angin sebenarnya, °(utara), °(timur laut), °(timur), °(tenggara), ° (selatan), °(barat daya), ° (barat), ° (barat laut). Gambar 3.3menunjukkan Arah mata angin
Gambar 3.3 Arah mata angin
3.2.2. Sensor Kecepatan Angin
Gambar 3.4 Piringan encoder dan sensor optic
Gambar 3.5 Sketsa Kecepatan angin
Ketika anemometer tertiup oleh angin, maka baling-baling mangkok akan bergerak pada anemometer. Semakin besar angin maka akan semakin cepat pula putaran yang dihasilkan oleh mangkok. Hasil dari sensor kecepatan angin berupa pulsa digital yaitu berlogika”0” atau “1”.
3.2.3 Arduino Uno
Gambar 3.6 Tampak Atas papan Arduino Uno
.Tabel 3.2 Pembagian port pada Arduino Uno R
No Nama Kaki Yang digunakan Keterangan
1 Sensor Arah angin PIN 3 Sebagai Masukkan
PIN 4 Sebagai Masukkan
PIN 5 Sebagai Masukkan PIN 8 Sebagai Masukkan
PIN 9 Sebagai Masukkan
PIN 10 Sebagai Masukkan PIN 11 Sebagai Masukkan
PIN 12 Sebagai Masukkan 2 Sensor Kecepatan angin PIN 2 Sebagai Masukkan
3 Wi-fi ESP8266 PIN 6 Sebagai Masukkan
PIN 7 Sebagai Masukkan
3.3. Perancangan Perangkat Lunak
3.3.1. Diagram alir Utama Pengiriman Data
Pada gambar 3.7 Menujukkan diagram alir keseluruhan proses pemrograman. Setelah mulai, program melakukan inisialisasi terhadap port-port mikrokontroler yang digunakan untuk proses bekerjanya alat. Pertama menghubungkan ke access point pada jaringan wi-fi agar dapat terkoneksi. Kedua dan ketiga melakukan pemrograman pada alat arah angin dan alat kecepatan angin supaya sensor dapat terbaca. Kemudian melakukan pemrograman pada alat ESP8266 agar mendapatkan IP yang dibutuhkan dan selajutnya mengirim data ke web browser dan ditampilkan hasil data tersebut.
3.3.2. Diagram Alir Subrutin Arah Angin
Melakukan pemrograman di Arduino IDE agar sensor dapat terbaca sesuai nama arah yang sudah di tetapkan dan tidak mengambil data sampling. Gambar 3.8 Menunjukkan diagram alir dari proses pengolahan data Arahangin.
3.3.3. Diagram Alir Subrutin Kecepatan Angin
Mulai
Inisalisasi Port Masukkan
Proses data arah angin
Proses data kecepatan angin
Sambungkan ke Access Point
Mendapatkan IP addres
Data dikirim Web
Tampilan di Web
Selesai
Mulai
Baca Sensor Arah angin
Data dikirim
Selesai
Gambar 3.8 Diagram alir proses pengolahan data arah angin
Gambar 3.7 Diagram alir keseluruah proses Pemograman
Mulai
Selesai
Gambar 3.9 Diagram alir proses pengolahan data Kecepatan angin
3.3.4. Alur Proses Koneksi dan Pengiriman Data
Mulai Sambungkan Wifi Access Point Membuka web browser Memasukkan IP addres Browser mengirim HTTP Menerima Server Sudah diterima Server HTTP: Web Page DikirmHTTP: File Not Found
BelumTer konek
A
A
3.3.5
. User Interface
Dalam mendesain tampilan Web yang digunakan User Interface pada penelitian ini. Maka hal ini harus menggunakan HTML sebagai bahasa pemograman web dasar.
Gambar 3.10 Rancangan tampilan Web
Pada gambar 3.10 menunjukkan Rancangan tampila Web.Terdapat 2 informasi tentang Kondisi Angin Terkini yang terdiri dari Arah Angin dan Kecepatan Angin, dimana arah angin dan kecepatan angin menyampaikan hasil data pada lokasi tersebut. Untuk update data pengiriman ke web tiap 10 detik.
Kondisi Angin Terkini
35
BAB IV
PEMBAHASAN
Bab ini berisi tentang hasil dan pembahasan Sistem Monitoring Pengukuran data
Arah dan Kecepatan menggunakan jaringan Wi-Fi ESP8266, yang terdiri hasil peracangan
hardware, pengujian tiap sensor arah dan kecepatan angin, serta pengujian modul
ESP8266-01 dengan Arduino UNO. Hasil pengujian berupa data-data yang diperoleh
untuk memperlihatkan kemampuan perangkat keras dan perangkat lunak yang dirancang
dapat bekerja dengan baik atau tidak. Dari data-data tersebut dapat dilakukan analisis
kinerja perangkat secara keseluruhan berdasarkan pengujian dari masing-masing subsistem
untuk mendapatkan hasil yang lebih akurat serta kemudian dapat digunakan untuk
mengambil kesimpulan akhir terhadap perangkat tersebut.
4.1. Hasil Perancangan Handware
Hasil perancangan ini terdiri dari handware yang terdiri dari Arduino Uno, modul
ESP8266-01 dan sensor arah dan sensor kecepatan angin. Hasil dari rangkian hardware ini
digunakan untuk sistem monitoring ditunjukkan pada gambar 4.1.
4.2. Pengujian Sensor
Pengujian sensor dilakukan untuk mendapatkan nilai baca sensor mendekati nilai
akurasi yang baik. Untuk hasil baca sensor arah saat low akan terdeteksi dan hasil baca
sensor kecepatan dibandingkan dengan hasil alat anemometer digital, untuk mengetahui
keakurasian sensor. Hasil pengujian diperoleh sensor yang telah diakurasi kemudian
digunakan pada perangkat.
4.2.1. Sensor Arah Angin
Sensor Arah yang digunakan dalam penelitian ini menggunakan modul sensor Ic
A3144 yang berjumlah 8 dengan tegangan 5volt. Sensor ini dapat digunakan untuk
mengetahui arah angin. Prinsip kerja dari sensor ini adalah dengan cara mengetahui mata
arah angin yang terdeteksi pada tiap-tiap sensor. Pada gambar 4.2. menunjukkan sensor
arah.
Gambar 4.2 Sensor arah
Pada penelian ini bahwa sensor arah menggunakan Arduino Uno sebagai input untuk
menjalankan program di dalam Arduino IDE. Untuk setiap input yang masuk ke Arduino
Tabel 4.1 Inisialisasi nama sensor arah
NO Arah PIN Arduiono
1 Utara 3
2 Timur laut 4
3 Timur 5
4 Tenggara 8
5 Selatan 9
6 Barat Daya 10
7 Barat 11
8 Barat laut 12
Tabel 4.1 adalah keterangan koneksi input Arduino Uno yang terhubung dengan
nama tiap sensor. Berdasarka diatas, misalnya Utara terhubung dengan pin 3 dan Timur
laut terhubung dengan pin 4 dan begitu pula pembacaan selanjutnya terdapat pada tabel
tersebut. pada input tersebut akan di inisialisasi pada program IDE.
Gambar 4.3 Inisialisasi nama input Arduino IDE
Inisialisasi berisi tentang pendefinisian dari fungsi dan variable yang digunakan
dalam proses pengeoperasian program. Inisialisasi nama input pada program Arduino IDE
dapat dilihat pada Gambar 4.3 dan Gambar 4.4 adalah inisialisasi pin input yang terdapat
pada pemograman Arduino IDE.
4.2.2. Sensor
Kecepatan Angin
Pada alat anemometer ini menggunakan sensor optocoupler dan LM393 sebagai komparator, dan tegangan 5Volt. Pada gambar 4.5 menunjukkan sensor anemometer.
Untuk persamannya dapat dilihat dari pada Gambar 4.6 adalah program Arduino IDE
untuk inisialisasi nilai masukan persamaan.
Gambar 4.5 Sensor Anemometer
Gambar 4.6 inisialisasi nilai masukan dan rumus perhitungan
Pada pemograman Arduino IDE untuk insialisasi nilai masukkan persamaan agar dapat
sensor optocoupler dan alat anemometer digital dapat dilihat pada Tabel 4.2. Dimana hasil pengujian ini menggunakan kipas blower pada gambar 4.7
Gambar 4.7 Kipas Blower
Spesifikasi AXIAL FAN BLOWER
1. TYPE : RT 1200 Belt Driver 2. POWER : 15 HP
3. VOLUME : 2250 m3/m 4. SPEED : 1450 RPM 5. PHASE : 3/60 Hz 6. STP : 30 mmAq 7. VOLT : 380 8. IP55
Spesifikasi 3 PHASE INDUCTION MOTOR
1. FRM/TYPE : 100M 2. POWER : 15 HP 3. VOLTAGE : 380 Vac 4. SPEED : 1450 RPM 5. CLASS : F/IP 55/ S1 6. 60 HZ
Tabel 4.2. Hasil Sensor Optocoupler dengan Anemometer
No Frekuensi (Hz) Jarak (cm) Hasil Sensor Optocoupler(m/s) Hasil sensor Anemometer(m/s) ERROR%
1 10 30 1.34 1.6 19.402
2 12 30 2.01 2 0.497
3 14 30 2.51 2.1 16.334
4 16 30 3.5 3.8 8.571
5 18 30 4.12 4.3 4.368
6 20 30 4.5 4.7 4.444
7 22 30 5.025 5.4 7.462
8 24 30 6.285 6.2 1.352
9 26 30 6.535 6.5 0.535
10 28 30 7.29 7 3.978
11 30 30 7.79 7.6 2.439
12 32 30 8.04 8 0.497
13 34 30 8.545 8.7 1.813
14 36 30 9.05 9 0.552
15 38 30 9.3 9.3 0
16 40 30 9.55 9.8 2.617
Dari hasil Sensor Optocoupler dan Anemometer digital, dapat dibuat dalam bentuk grafik untuk memperoleh nilai persamaan dapat dilihat pada Gambar 4.8.
Gambar 4.8 Hasil Grafik data
Dari grafik diatas (Gambar 4.8.) dapat diambil persamaan dengan bantuan Excel
pada format trendline. Pada trendline options dipilih linear dan centang display Equation on char untuk menampilkan hasil persamaan dan display R-squared value on char untuk mengetahui nilai kepresisian yang didapat. Terlihat bahwa nilai R2 = 0,993, ini
menunjukan bahwa sensor dapat bekerja dengan baik. Nilai skala presisi memiliki
y = 0,9894x + 0,1013 R² = 0,9934
0 2 4 6 8 10 12
0 2 4 6 8 10 12
H asi l A n e m o m e te r D ig ital (m /s)
jangkauan -1, 0, 1. Jika nilai R2 mendekati nilai 1 maka nilai presisinya baik, namun jika
nilai R2 mendekati nilai 0 maka nilai presisinya buruk, dan jika nilai R2 mendekati nilai -1
maka nilai presisi berkebalikan dari nilai presisi yang sebenarnya.
4.3. Pengujian Wi-Fi ESP8266-01
Proses pengiriman data arah dan kecepatan ke web browser menggunakan modul
Wi-Fi ESP8266, dalam penelitian ini menggunakan Wi-Fi ESP8266-01. ESP8266-01 ini
dihubungkan dengan Arduino UNO untuk menjalankan perintah AT Command melalui
serial monitor. Pada Gambar 4.9. dapat menujukakan ESP8266-01 yang terhubung secara
serial dengan Arduino UNO.
Gambar 4.9 ESP8266-01 yang terhubung secara serial dengan Arduino UNO
4.3.1. AT Command
Perintah AT Command digunakan untuk mengatur ESP8266. Perintah ini dapat
mulai dari restart hingga pengaturan komunikasi, ESP8266 juga digunakan sebagai acces
point (AP) hingga sebagai client dalam suatu jaringan nirkabel. Dalam penelitian ini AT
Command untuk mengatahui karakteristik dan respon ESP terhadap masukan perintah AT
Command.
Pada pengujian ini, perintah AT Command akan dimasukan kedalam program
Arduino IDE, sehingga tidak perlu memberikan perintah AT Command pada serial
monitor. Fungsinya adalah untuk menerima data dari sensor arah dan sensor Optocoupler
ESP8266-01 sebagai AP, dimana Android atau browser lainnya akan terhubung pada
ESP8266.
4.3.2 Pemrograman ESP8266 sebagai Acces Point
Pada pengujian ini, ESP8266 diatur sebagai Access Point (AP), sedangkan perangkat
browser seperti Android sebagai client. Untuk sketch program Arduino IDE nya dapat
dilihat pada Gambar 4.10 di bawah ini.
Gambar 4.10. Sketch Arduino IDE ESP8266-01
Pada Gambar 4.10. menunjukkan bahwa Arduino membutuhkan berkas software
serial. Komunikasi antara ESP8266 dengan Arduino UNO menghubungkan pin Tx dan Rx
pada ESP8266 masing-masing terhubung pada pin 6 dan pin 7 pada Arduino UNO. Untuk
perintah AT Command dimasukan pada sketch program Arduino IDE, dapat dilihat pada
Gambar 4.11 di bawah ini
Pada Gambar 4.11. menunjukkan pengaturan ESP8266 dengan memberi perintah AT
Command pada sketch program Arduino IDE. Setelah diatur sebagai access point (AP),
maka Arduino UNO akan bekerja secara rutin dengan mengolah hasil baca dua sensor
digital. Kedua sensor itu, yaitu sensor arah dan sensor Optocoupler. Jika terkoneksi dengan AP ESP8266 dan mengakses pada web browser dengan memberikan alamat 192.168.4.1
maka secara auto refresh Arduino UNO melalui ESP8266 mengirim hasil baca sensor arah
dan sensor kecepatan. Untuk lebih jelasnya sketch program dapat dilihat pada Gambar
4.12.
Gambar 4.12. Program Arduino IDE Untuk Rutin Jika ada Refresh Web dengan Alamat
192.168.4.1
Hasil dari sketch program Arduino IDE untuk ESP8266 sebagai AP dengan
pengiriman data sensor dapat dilihat pada serial monitor. Dimana mikrokontroler dapat
bekerja dengan baik. Pada Gambar 4.13. dapat dilihat respon dari ESP8266 pada serial
monitor dan Gambar 4.14. Wi-Fi ESP8266-01 terkoneksi Android dan Gambar 4.15.
Gambar 4.13. Respon ESP8266-01 pada Serial Monitor
Gambar 4.15. Respon pada Serial Monitor Saat Akses Web 192.168.4.1
4.4. Tampilan data ke Web Browser
Hasil dari pengujian ini, dapat dilihat pada Gambar 4.16. dimana pengiriman data
melalui modul WiFi ESP8266 Seri 01 ke Android dapat dilakukan dengan baik.
Pengiriman hasil sensor arah dan sensor Optocoupler ke web server yang terkoneksi pada AP ESP8266 membutuhkan waktu tunda yang masih dalam jangkauan, yaitu mengalami
delay 2 hingga 5 detik. jadi untuk melihat data selajutnya di web browser maka harus
menunggu sekitar 10 detik.
4.5. Pengujian Jangkaun Wi-Fi
Dalam hal ini kemampuan modul ESP8266-01 yang terhubung ke Arduino Uno
untuk memancarkan wifi dan dapat diterima oleh Android sangatlah penting. Jangkuan
jarak pancar ini dipengaruhi lokasi tempat pengambilan data. Pada lokasi pengambilan data
didalam ruangan yang penuhi dengan meja atau tersekat oleh suatu dinding. Pada jangkuan
wifi menjadi dekat di karenakan gelombang terhalang oleh berbagai benda yang ada di
ruangan. Tabel 4.3 menunjukkan hasil jangkuan jarak wifi dan kekuatan wifi. Gambar 4.17
menunjukkan hasil grafik jarak dengan kekuatan wifi
Tabel 4.3.Hasil jangkuan jarak wifi dan kekuatan wifi
No Jarak (meter)
Kekuatan wifi (dbm)
Data kirim Sinyal
1 1 -45 Data diterima 4
2 2 -52 Data diterima 4
3 3 -60 Data diterima 3
4 4 -60 Data diterima 3
5 5 -64 Data diterima 3
6 6 -67 Data diterima 3
7 7 -69 Data diterima 3
8 8 -73 Data diterima 2
9 9 -74 Data diterima 2
10 10 -72 Data diterima 2
11 11 -80 Data diterima 1
12 12 -76 Data diterima 2
13 13 -81 Data diterima 1
14 14 -82 Data diterima 1
15 15 -83 Data tidak diterima 0
Gambar 4.17 Grafik Jarak dan dBm
-100 -80 -60 -40 -20 0
0 2 4 6 8 10 12 14 16
kek
ua
tan
wifi(dBm)
jarak (meter
)
Dalam gambar diatas bawah pengujian ini untuk mengetahui berapa jauh jangkaun
wifi saat mengirim data sensor ke web browser. Jika pengiriman data ini semakin jauh
jarak android dengan wifi ESP8266 maka kekuatan wifi akan besar dan sebaliknya jika
jarak android dengan wifi ESP8266 semakin dekat maka kekuatan wifi akan kecil. Jadi
pada pengujian ini semakin kecil kekuatan wifinya maka semakin baik saat pengiriman.
Pada pengujian ini menggunakan aplikasi WiFi Overview 360.
4.6. Analisis kinerja perangkat secara keseluruhan
Dari penlitian ini bahwa kinerja setiap perangkat keras dan perangkat lunak sangat
baik. Pada alat sensor arah dapat mendeteksi tiap sensor yang dipasang membentuk arah
kompas, sensor arah ini mempunyai 8 arah yaitu Utara, timur laut, timur, tenggara, selatan,
barat daya, barat, barat laut, dan untuk alat sensor Optocoupler bekerja dengan baik, saat pengujian sensor ini menggunakan alat kipas blower. Hasil pengujian ini dapat mengetahui
kecepatan angin dengan maksimal 9,55 m/s. alat sensor optocoupler dikalibrasi dengan alat anemometer digital agar mendapatkan nilai yang persisi. Untuk modul ESP8266-01 dapat
bekerja baik dan maupun saat mengirim data ke web browser, untuk pemancaran Wi-Fi
memiliki jangkuan jarak terbatas. Web browser dapat menerima dengan baik dan untuk
pengiriman data membutuhkan waktu. Gambar 4.18 menujukkan Perangkat keras
keseluruhan
48
BAB V
KESIMPULAN DAN SARAN
5.1. Kesimpulan
Setelah melakukan perancangan dan pengujian pada tiap sensor, penelitian ini dapat menarik kesimpulan sebagai berikut:
1. Dapat mengetahui arah angin yang benar dan kecepatan angin yang maksimal. 2. Sistem ini dapat mengirim data melalui wifi ESP8266 dengan jarak 14 meter. 3. Data hasil sensor dapat diketahui dari Android/laptop dengan membuka web
browser.
5.2. Saran
Berdasarkan hasil implementasi yang diperoleh, untuk pengembangan lebih lanjut ada saran agar sistem monitoring pengukuran arah dan kecepatan melalui jaringan wi-fi ini dapat bekerja dengan baik.
1. Pada project sensor arah terjadi kesalahan dalam membuat 8 arah angin secara konstan, permasalah ini mungkin dapat diselesaikan dengan membuat 8 arah angin secara otomatis agar dapat mengetahui arah saat di uji diberbagai tempat.
2. Untuk penampilan data ke web, semoga kedepannya dapat membuat tampilan pada web yang lebih baik.
49
DAFTAR PUSTAKA
[1] Azlina, Maya., 2013,Pembuatan Alat Ukur Kecepatan Angin dan Penunjuk Arah Angin Berbasis Mikrokontroler AT-Mega 8535, (Skripsi), Jurusan Fisika,Fakultas Matematika dan Ilmu Pengetahuan Alam,Universitas Sumatera Utara, Medan. [2] BNPB., 2014, Info Bencana Edisi Desember 2014.
http://bnpb.go.id/uploads/publication/1069/Info_Bencana_Desember.pdf,Diakses 23 September 2016.
[3] Melas, Alvon., 2014,Purwarupa Sistem Peringatan Dini Bencana Alam Angin Putting Beliung Berdasarkan Kecepatan Angin Berbasis Jaringan Kabel. (TugasAkhir). Program Studi D3 Elektronika dan Instrumentasi Sekolah Vokasi Universitas Gadjah Mada Yogyakarta.
[4] Wijayanti, D., Rahmawati, E., danSucahyo, I., 2015, Rancang Bangun Alat Ukur Kecepatan Dan Arah Angin Berbasis Arduino Uno atmega 328p, Jurusan Fisika, FMIPA, UNESA, Jurnal Inovasi Fisika Indonesia Volume 04 Nomor 03, hal 150– 156.
[5]
http://www.ilmudasar.com/2016/11/Pengertian-Fungsi-Karakteristik-Faktor-Macam-Jenis-Angin-adalah.html, diakses 25 januari 2017
[6] Fadholi., Akhmad., 2013, Analisis Komponen Angin Landas Pacu(Runway)Bandara Depati Amir Pangkal pinang., vol. 13, No. 2, 45-53.
[7]
http://www.metoffice.gov.uk/media/pdf/4/4/Fact_Sheet_No._6_-_Beaufort_Scale.pdf, diakses 26 Januari 2017
[8] http://www.elecrow.com/download/A3141-2-3-4-Datasheet.pdf, diakses 17
November 2016.
[9] Banodin., Rizal., 2011, ALAT PENUNJUK ARAH ANGIN DAN PENGUKUR KECEPATAN ANGIN BERBASIS MIKROKONTROLLER AT89C51 (TugasAkhir). Jurusan Teknik Elektro,Fakultas Teknik, Universitas Diponegoro.
[10]
http://luckyhermanto.dosen.narotama.ac.id/files/2011/10/konsep-komunikasi-serial.pdf, diakses 14 Oktober 2016
[12]
http://www.alldatasheet.com/datasheet-pdf/pdf/241077/ATMEL/ATMEGA328P.html, diakses 14 Oktober 2016
[13] https://www.arduino.cc/en/Main/ArduinoBoardUno,diakses 20Oktober 2016.
[14] Resptia., Sambu, 2016, SISTEM AKUSISI DATA KINCIR ANGIN PROPELER BERBAHAN KAYU. (Skripsi).Jurusan Teknik Elektro, Fakultas Sains danTeknologi, UniversitasSanata Dharma Yogyakarta.
[15] http://www.sinauarduino.com/artikel/esp8266/, diakses 5 Desember 2016
[16] Susanti., Tinaningrum, 2010, ANALISA KEHANDALAN JARINGAN VSAT DIJINJAU DARI DELAY, DATA RATE DAN SERVICE LEVEL. (Skripsi).Jurusan Teknik Elektro, Fakultas Teknik Universitas Indonesia.
[17] http://www.pintarkomputer.net/2016/02/pengertian-internet-protokol-ip-beserta.html, diakses 9 Desember 2016
[18] http://www.patartambunan.com/pengertian-ip-address/diakses 20 Desember 2016
[19] http://digilib.unila.ac.id/16644/88/BAB%20II.pdf, diakses 1 Januari 2017
Pemrograman Arduino IDE
#include <SoftwareSerial.h> #define DEBUG true
#define utara 3 #define tl 4 #define timur 5 #define tenggara 8 #define selatan 9 #define bd 10 #define barat 11 #define bl 12
SoftwareSerial esp8266(6,7); // make Tx Arduino line is pin 6, make Rx Arduino line is pin 7
/*inisialisasi*/
const float pi = 3.14159265; //nilai phi
int periode = 1000; //hitung sampling perberapa detik
int radio = 80; // Distance from center windmill to outer cup (mm) int jumlahcelah = 22; // jumlah celah sensor
/*nilai awal variabel*/
unsigned int hitung = 0; // B/W counter for sensor unsigned int RPM = 0; // Revolutions per minute float kecepatanangin = 0; // Wind speed (m/s)
void setup() {
esp8266.begin(115200); pinMode(2,INPUT); digitalWrite(2, HIGH);
pinMode(utara,INPUT_PULLUP); pinMode(tl,INPUT_PULLUP); pinMode(timur,INPUT_PULLUP); pinMode(tenggara,INPUT_PULLUP); pinMode(selatan,INPUT_PULLUP); pinMode(bd,INPUT_PULLUP); pinMode(barat,INPUT_PULLUP); pinMode(bl,INPUT_PULLUP);
senddata("AT+RST\r\n",2000,DEBUG); delay(4000);// reset module
senddata("AT+CWMODE=2\r\n",1000,DEBUG); // configure as access point delay(1000);
senddata("AT+CIFSR\r\n",1000,DEBUG); // get ip address delay(5000);
senddata("AT+CIPMUX=1\r\n",1000,DEBUG); // configure for multiple connections delay(1000);
senddata("AT+CIPSERVER=1,80\r\n",1000,DEBUG); // turn on server on port 80 delay(1000);
Serial.println("ESP8266 Readi as AP!!!"); }
void loop() {
if(!esp8266.available()) {
else if(digitalRead(timur)==LOW){Serial.println(" Timur");} els

![Gambar 2.7Pin Mapping Atmega 168/328[12]](https://thumb-ap.123doks.com/thumbv2/123dok/613186.163634/30.595.86.534.73.739/gambar-pin-mapping-atmega.webp)