SKRIPSI
Oleh :
J ALUR MAULANA MALIK
NPM. 0734010007
J URUSAN TEKNIK INFORMATIKA FAKULTAS
TEKNOLOGI INDUSTRI UNIVERSITAS PEMBANGUNAN
Diajukan Untuk Memenuhi Sebagai Persyaratan
Dalam Memperoleh Gelar Sarjana Komputer
Jurusan Teknik Informatika
Oleh :
J AALUR MAULANA MALIK
NPM. 0734010007
J URUSAN TEKNIK INFORMATIKA FAKULTAS
TEKNOLOGI INDUSTRI UNIVERSITAS PEMBANGUNAN
MIKROKONTROLLER AT-MEGA 8535
Oleh :
J ALUR MAULANA MALIK
NPM. 0734010007
Telah disetujui untuk mengikuti Ujian Negar a Lisan Gelombang Tahun Akademik 2011/2012
Pembimbing Utama Pembimbing Pendamping
Basuki Rahmat. S.Si. MT Ir. Kartini,S.Kom, MT
NIP/NPT. 3 6907 06 0209 1 NIP/NPT. 19611110 199103 2001
Mengetahui,
Ketua J urusan Teknik Infor matika Fakultas Teknologi Industri UPN ”Veteran” J awa Timur
Oleh :
J ALUR MAULANA MALIK NPM. 0734010007
Telah dipertahankan di hadapan dan diterima oleh Tim Penguji Skr ipsi J ur usan Teknik Infor matika Fakultas Teknologi Industri
Univer sitas Pembangunan Nasional ”Veteran” J awa Timur Pada Tanggal 14 Desember 2012
Univer sitas Pembangunan Nasional ”Veteran” J awa Timur
iii
terimakasih pada semua yang telah berjasa membantu pengerjaan skripsi ini.
1) Bapak Prof. Dr. Ir. Teguh Soedarto, MP, Selaku Rektor Universitas Pembangunan
Nasional “Veteran” Jawa Timur Surabaya.
2) Bapak Ir. Sutiyono, MT, selaku Dekan Fakultas Teknologi Industri Universitas
Pembangunan Nasional “Veteran” Jawa Timur Surabaya.
3) Ibu Dr. Ir. Ni Ketut Sari, MT selaku Ketua Jurusan Teknik Informatika Universitas
Pembangunan Nasional “Veteran” Jawa Timur Surabaya.
4) Bapak Basuki Rahmat, Ssi, MT dan Ibu Ir. Kartini MT selaku dosen pembimbing di
jurusan Teknik Informatika Universitas Pembangunan Nasional “Veteran” Jawa Timur
Surabaya yang telah memberikan waktu, arahan dan bimbingannya sehingga penulis
dapat menyelesaikan laporan skripsi ini.
5) Untuk Keluarga tersayang ( Ayah, Ibu, Kakak, Adik ) yang telah memberikan dukungan,
doa, cinta, dan kasih sayang dan semua pengorbanan yang beliau berikan.
6) Untuk saudara Suep Rizal dan Astria Rus Andika Susila yang telah memberi ijin untuk
mengembangkan robotnya, Rizki Fragas yang benerin printer.
7) Untuk guru-guru yang terhormat, S.Bahrudin, Sa’I, R.S Hasdijatmiko, Bu punsu, Tatmo
cowsu ya, Sidharta Gautama, Muhammad, Age priambodo.
8) Sahabat terbaik Fanny febriana, C-nyo dan Ame, Bajay-zen dan Lulu, Hari S, Uyiz,
iv
Faisol, Juzz, Ardi, Cicik, Tobib, Adi Nugroho, Gibran, Gigih cepet selesaikan TA nya
gih, Nophan, Rizal, Aditya, dan semua teman yang berjasa atas dukungannya dan semua
pihak yang tidak mungkin penulis sebutkan namanya satu per satu terima kasih telah
ii
Segala Puji Bagi Allah SWT atas segala limpahan Karunia-Nya sehingga dengan segala
keterbatasan waktu, tenaga dan pikiran yang dimiliki penyusun, akhirnya penyusun dapat
menyelesaikan Skripsi dengan judul “ ROBOT BECAK BER GPS MENGGUNAKAN
MIKROKONTROLLER AT-MEGA 8535” dengan tepat waktu.
Skripsi ini merupakan syarat akademis yang harus dipenuhi oleh mahasiswa jurusan
Teknik Informatika UPN “Veteran” Jawa Timur Surabaya.
Dalam penulisan laporan skripsi ini penulis menyadari telah mendapatkan banyak
bantuan dari berbagai pihak baik dari segi moril maupun materil yang tidak akan mungkin dapat
terbalas.
Penulis menyadari bahwa dalam penulisan laporan skripsi ini masih banyak kekurangan
nya. Oleh sebab itu penulis mengharapkan kritik dan saran yang sifatnya membangun dari
pembaca. Semoga laporan ini bermanfaat bagi penulis dan para pembaca.
Surabaya, 14 Desember 2012.
v 1.6 Metodologi Penelitian ……… 4 4 1.7 Sistematika Penulisan ……… 5
BAB II TINJ AUAN PUSTAKA ……… 7
2.1 Sejarah dan Perkembangan Robot ……… 2.1.1 Karakteristik Robot ………... 2.1.2 Tipe Robot ………. 7 10 10 2.2 Pengertian dan Kegunaan GPS (Global Position System)…. 2.2.1 Penentuan Posisi dengan GPS……….... 2.2.2 Sistem Satelit GPS………. 2.2.3 Signal Satelit GPS……….. 2.2.4 Cara Kerja GPS……….. 2.2.5 Bagaimana sinyal dapat menentukan lokasi………... 11
2.5 Mikrokontroller ATmega 8535 ……… 2.5.1 Konfigurasi Pin ATMega 8535... 2.5.2 Peta Memori Mikrokontroler ATMega 8535... 2.5.3 Pengenalan USART ATmega8535 23 26 31 32 2.6 Motor Servo Standart Sebagai Aktuator Kemudi ………… 38
vi 3.3 Perancangan Perangkat Lunak ……… 3.4 Perancangan alur kerja system………..
4.2 Pemrograman C denganCodeVisionAVR ……….. 64
vii
5.3.4.2 Pengujian Pada Lokasi di Bawah Rerimbunan Pohon … 88
5.3.4.3 Pengujian Pada Lokasi di Dalam rumah ……….. 88
5.3.4.4 Pengujian Pada Lokasi di Ruang Terbuka ……... 89
5.3.4.5 Pengujian pada Lokasi Padat Bangunan ………. 89
5.3.4.6 Evaluasi Percobaan ………... 90
BAB VI PENUTUP ……… 92
6.1 Kesimpulan ……… 92 6.2 Saran ………
DAFTAR PUSTAKA ……… 93
i
Penyusun : Jalur Maulana Malik
ABSTRAK
Di era informatika seperti saat ini seiring kemajuan teknologi robotika yang sangat pesat serta banyaknya kontes-kontes robotika belakangan ini membuat kreatifias akan terciptanya robot-robot canggih semakin berkembang. Adanya wadah dan komunitas-komunitas robotika
dikalangan mahasiswa menjadikan teknologi ini semakin digemari bahkan mulai menjadi salah satu kontes yang mengharumkan nama bangsa di dunia internasional.
Pada penelitian ini akan di kembangkan sebuah robot beroda dengan menggunakan modul GPS yang dapat menampilkan posisi dirinya sendiri di permukaan bumi dalam sebuah LCD.
Sistem ini merupakan tahap pengembangan dari robot sebelumnya yang berbasis mikrokontroller.
Dalam penelitian ini modul GPS yang dipasang pada robot becak akan bekerja berdasarkan berdasarkan sinyal satelit yang terdeteksi oleh modul GPS, maka robot becak tersebut akan menampilkan posisi lintang dan bujur keberadaannya sendiri. Robot ini juga
menggunakan IC mikrokontroller ATMega8535 yang telah diisi program bahasa C. LCD berfungsi untuk menampilkan lintang dan bujur hasil olahan darimikrokontroller. Dari hasil uji coba robot becak yang sudah dijalankan, bahwa modul GPS yang dipasang pada robot becak telah bekerja dengan baik.
1 1.1 Latar Belakang
Perkembangan dunia robot di Indonesia dewasa ini sudah sangat pesat.
Terbukti dengan banyak diselenggarakannya kontes robotika perlombaan robotika
Kontes robot semacam ini diharapkan akan melahirkan teknologi baru dan juga
menjadi ajang kreatifitas anak bangsa untuk mengembangkan dunia robotika.
Robot yang akan dibuat pada tugas akhir ini adalah robot beroda,
pengembangan dari robot beroda jenis becak berbasis mikrokontroller sebelumnya
[1]. Pada mulanya robot ini dilengkapi dengan sensor-sensor ultrasonic yang dapat
mendeteksi halangan agar robot tetap berada di tengah jalur tanpa menabrak
halangan di sisi kanan, kiri dan depan. Untuk mendukung kerja robot yang
komplek diperlukan juga mekanik-mekanik yang sesuai dan pemprograman yang
berbasis mikrokontroler. Dengan penambahan GPS pada robot becak ini bertujuan
untuk menampilkan dan memantau posisi robot ketika berjalan dalam bentuk
koordinat.
cuaca, bagi banyak orang secara simultan. Saat ini GPS sudah banyak digunakan orang di seluruh dunia dalam berbagai bidang aplikasi yang menuntut informasi tentang posisi, kecepatan, percepatan ataupun waktu yang teliti. GPS dapat memberikan informasi posisi dengan ketelitian bervariasi dari beberapa millimeter (orde nol) sampai dengan puluhan meter. Hingga saat ini GPS merupakan sistem satelit navigasi yang paling populer dan paling banyak diaplikasikan di dunia, baik di darat, laut, udara, maupun angkasa. Disamping aplikasi-aplikasi militer, bidang-bidang aplikasi GPS yang cukup banyak saat ini antara lain meliputi survai pemetaan, geodinamika, geodesi, geologi, geofisik, transportasi dan navigasi, pemantauan deformasi, pertanian, kehutanan, dan bahkan juga bidang olahraga dan rekreasi.[2]
1.2 Rumusan Masalah
Adapun permasalahan yang akan dibahas adalah sebagai berikut :
1. Bagaimana membuat rangkaian minimal sistem yang stabil dengan memanfaatkan mikrokontroler ATMega 8535.
2. Bagaimana merancang algoritma program yang tepat agar mikrokontroller dapat mengelola data dari GPS dan menampilkannya di layar LCD..
1.3 Batasan Masalah
1. Pengujian robot ini di utamakan pada sebuah halaman bebas halangan/tidak ada halangan diatasnya.
2. Robot setidaknya mengunci minimal 3 satelite untuk mendapatka data yang akurat.
3. hasil pengelolaan data dari mikrokontroller ditampilkan di LCD. 4. Bahasa pemrograman yang digunakan adalah Bahasa C.
5. Perubahan akan dapat dilihat jika perpindahannya jauh.
1.4 Tujuan
Dalam penyusunan tugas akhir ini tujuan yang dicapai adalah mengembangkan teknologi robot yang sudah ada dengan menambahkan teknologi GPS agar robot dapat mengetahui posisinya sendiri di bumi. Mengacu pada tujuan utama pada tugas akhir ini maka terdapat beberapa tujuan khusus antara lain :
1. Membuat rangkaian minimal sistem yang stabil dengan memanfaatkan mikrokontroler ATMega 8535.
2. Merancang algoritma program yang tepat agar mikrokontroller dapat mengelola data dari GPS dan menampilkannya di layar LCD. 3. Memannfaatkan teknologi GPS untuk keperluan navigasi pada
robot becak.
1.5 Manfaat
Adapun manfaat yang dapat diambil dari pembuatan robot becak berbasis GPS menggunakan mikrokontroller Atmega8535 ini adalah :
1. Digunakan sebagai bahan media pembelajaran di Laboratorium Robotika UPN Veteran Jawa Timur.
2. Mendorong mahasiswa pecinta robotika khususnya UPN Veteran Jatim untuk terus dan turut ikut serta dalam mengembangkan teknologi robotika di tanah air.
3. Agar menjadi sumber inspirasi para robotika yang menginginkan membuat robot dengan desain komponen yang minimal tetapi dengan fungsi yang tidak kalah canggih.
1.6 Metodologi Penelitian
Metodologi yang digunakan pada penelitian ini adalah sebagai berikut : 1. Studi literature mengenai pengendalian motor servo sebagai
actuator utama pada robot becak. Serta pemanfaatan teknologi GPS.
2. Merancang serta menguji rangkaian GPS yang digunakan untuk mengetahui letak/posisi robot becak.
3. Merancang serta menguji sistem minimal Mikrokontroler ATMega 8535 sebagai pengendali sistem secara keseluruhan.
5. Menguji kinerja sistem secara keseluruhan serta mengambil data dari hasil perancangan.
6. Menganalisa hasil dan membuat kesimpulan. 1.7 Sistematik Penulisan
Adapun Sistematika Tugas Akhir ini adalah:
BAB I : PENDAHULUAN
Bab ini menjelaskan tentang latar belakang, rumusan masalah, batasan masalah, tujuan, manfaat, metodologi penelitian dan sistematika penulisan.
BAB II : TINJ AUAN PUSTAKA
Pada bab ini dijelaskan tentang teori-teori serta penjelasan-penjelasan yang dibutuhkan dalam
pembuatan robot becak ber-GPS dengan menggunakan Atmega 8535.
BAB III : ANALISIS DAN PERANCANGAN SISTEM
Bab ini berisi tentang analisis dan perancangan sistem dalam pembuatan Tugas Akhir robot becak berbasis GPS dengan menggunakan ATmega 8535.
BAB IV : IMPLEMENTASI SISTEM
Bab ini berisi penjelasan hasil Tugas Akhir serta pembahasannya tentang robot becak ber-GPS dengan menggunakan ATmega 8535.
Bab ini berisi pengujian program Tugas Akhir.
BAB VI : PENUTUP
Bab ini berisi kesimpulan dan saran-saran penulis. DAFTAR PUSTAKA
7 2.1 Sejara h dan Per kembangan Robot
Robot adalah alat mekanika yang dapat melakukan tugas fisik, baik lewat
pantauan manusia, maupun bekerja secara komputerisasi yang menghasilkan
kecerdasan dan perilaku yang individu. Kata robot sendiri, diperkenalkan oleh
seorang penulis sains-fiksi berkebangsaan Ceko (Czech) Karel Capek Istilah robot
menurut Karel Capek, adalah sesuatu yang mengarah kepada "monoton" dan
"pekerja". Karel Capek memperkenalkan istilah robot (robota, bahasa
Ceko-Ensiklopedia Indonesia) dalam sebuah karya sandiwaranya, Rossum's Universal
Robot.
Awal munculnya robot dapat diketahui dari bangsa Yunani kuno yang
membuat patung yang dapat dipindah – pindahkan. Sekitar 270 BC, Ctesibus, seorang
insinyur Yunani membuat organ dan jam air dengan komponen yang dapat
dipindahkan. Zaman nabi Muhammad SAW pun, telah membuat mesin perang yang
Pada tahun 1770, Pierre Jacquet Droz, seorang pembuat jam berkebangsaan
swiss membuat 3 boneka mekanis yang dapat melakukan fungsi spesifik, yaitu dapat
menulis, memainkan musik dan menggambar.
Pada tahun 1967, Jepang yang pada saat itu merupakan negara yang baru
bangkit, mengimpor robot dari Versatran dari AMF. Awal kejayaan robot pada tahun
1970, ketika Profesor Victor Scheinman dari Universitas Stanford mendesain lengan
standar. Saat ini, konfigurasi kinematikanya dikenal sebagai standar lengan robot.
Terakhir, pada tahun 2000 Honda memamerkan robot yang dibangun bertahun -
tahun lamanya bernama Asimo, serta disusul oleh Sony yaitu robot anjing Aibo.
Istilah robot saat ini secara populer diartikan sebagai apa saja yang dapat
membentuk mesin–mesin robot yang diletakkan bersamaan dan bekerja secara
mandiri. Pada umumnya bagian–bagian yang menunjang pembentukan suatu robot
adalah :
• Central Computer atau Control Circuitry, bagian ini sebagai otak yang
mengolah dan mengatur segala sesuatu yang menyebabkan robot itu dapat
kelihatan hidup. Dia mengolah apa yang diberikan oleh bagian input dan
mengontrol apa yang akan dilakukan pada bagian outputnya.
• Obstacle Detectors, Vision System : ini sebenarnya bagian dari input yang
memberikan masukan–masukan variabel guna diolah untuk menentukan
• Driver Motor, Arm, Gripper : tidak seluruhnya harus terpasang lengkap,
namun driver motor adalah yang paling dominan banyak dijumpai pada
robot, dan ini adalah bagian dari output sistemnya. Pada umumnya bagian
ini ditunjang oleh seperangkat alat–alat mekanis.
• Central Power System : bagian ini amat vital karena merupakan nyawa
bagi robot. Ketiga bagian di atas selalu membutuhkan daya untuk dapat
bekerja, maka bagian ini sangat penting.
Berikut gambar Blok Diagram Robot secara umum yang menggambarkan deskripsi di
atas [4] :
Gambar 2.1 Blok Diagram Robot
Dari gambar 2.1 dapat terlihat bahwa sebuah robot sebagian besar terdiri dari
rangkaian mekanik yang saling terintegrasi satu dengan yang lainya.
2.1.1 Ka r akter istik Robot
Sebuah robot umumnya memiliki karakteristik sebagai berikut :
1. Sensing : Robot dapat mendeteksi lingkungan sekitarnya (halangan, panas,
suara, dan image).
2. Mampu Bergerak : Robot umumnya bergerak dengan menggunakan kaki atau
roda, dan pada beberapa kasus robot dapat terbang dan berenang.
3. Cerdas : Robot memiliki kecerdasan buatan agar dapat memutuskan aksi yang
tepat dan akurat.
4. Membutuhkan Energi yang Memadai : Robot membutuhkan catu daya yang
memadai.
2.1.2 Tipe Robot
Robot didesain dan dibuat sesuai kebutuhan pengguna. Robot hingga saat ini secara
umum dibagi menjadi beberapa tipe sebagai berikut :
1. Robot mobil (mobile robot)
§ Robot daratan (ground robot)
1) Robot beroda
2) Robot berkaki
2. Robot air (submarine robot)
3. Robot terbang (aerial robot)
5. Robot manipulator
Robot manipulator biasanya dicirikan dengan memiliki lengan (arm robot).
Robot ini biasanya diterapkan pada dunia industri, seperti pada industri otomotif,
elektronik dan komputer. Sedangkan robot mobil mengarah ke robot yang bergerak,
meskipun nantinya robot ini juga memiliki manipulator.
2.2 Penger tian dan Kegunaan GPS (Global Position System)
Global Positioning System (GPS) adalah sistem radio navigasi dan penentuan
posisi menggunakan satelit, dengan nama resmi NAVSTAR GPS (Navigation
Satellite Timing and Ranging Global Positioning System). GPS dikembangkan
pertama kali oleh Departemen Pertahanan Amerika Serikat pada tahun 1978 dan
secara resmi GPS dinyatakan operasional pada tahun 1994. Pada awalnya GPS
digunakan hanya untuk kepentingan militer Amerika Serikat, tetapi kemudian dapat
dimanfaatkan juga untuk kepentingan sipil.
Sistem GPS mempunyai tiga segmen yaitu : Contr ol, Satelite, Pengguna.
• Segmen Kontr ol
Segmen kontrol terdiri dari suatu sistem yang bertugas mengontrol kegiatan
satelit GPS yang tersebar di seluruh dunia. Selain mengontrol dan memonitor
satelit, segmen kontrol ini juga berfungsi menentukan orbit dari seluruh satelit
GPS yang merupakan informasi paling penting untuk penentuan posisi dengan
• Segmen Satelit
Segmen satelit terdiri dari satelit-satelit GPS. Konstelasi GPS terdiri dari 24 satelit
yang menempati enam buah bidang orbit yang berbentuk mendekati lingkaran,
dengan masing-masing bidang orbit ditempati empat buah satelit. Orbit satelit
berinklinasi 55 terhadap bidang khatulistiwa bumi dan bergerak dengan periode 12
jam.
• Segmen Pengguna
Segmen pengguna terdiri dari para pengguna yang tersebar di seluruh permukaan
bumi dan alat penerima GPS. Secara umum segmen pengguna ini dibagi menjadi
dua yaitu Pengguna GPS, dan Pengguna Sipil [2].
Gambar 2.2 Segmen GPS
Pada gambar 2.2 Segment Control sebagai pengontrol dan monitoring orbit pada
2.2.1 Penentuan Posisi dengan GPS
Pada dasarnya penentuan posisi dengan GPS adalah pengukuran jarak secara
bersama-sama ke beberapa satelit (yang koordinatnya telah diketahui) sekaligus.
Untuk menentukan koordinat suatu titik di bumi, receiver setidaknya membutuhkan 4
satelit yang dapat ditangkap sinyalnya dengan baik. Secara default posisi atau
koordinat yang diperoleh bereferensi ke global datum yaitu World Geodetic System
1984 atau disingkat WGS'84.
Secara garis besar penentuan posisi dengan GPS ini dibagi menjadi dua metode yaitu
metode absolute dan metode relatif
• Metode absolute atau juga dikenal sebagai point positioning, menentukan
posisi hanya berdasarkan pada 1 pesawat penerima (receiver) saja. Ketelitian
posisi dalam beberapa meter (tidak berketelitian tinggi) dan umumnya hanya
diperuntukkan bagi keperluan NAVIGASI.
• Metode relative atau sering disebut differential positioning, menetukan posisi
dengan menggunakan lebih dari sebuah receiver. Satu GPS dipasang pada
lokasi tertentu dimuka bumi dan secara terus menerus menerima sinyal dari
satelit dalam jangka waktu tertentu dijadikan sebagai referensi bagi yang
lainnya. Metode ini menghasilkan posisi berketelitian tinggi (umumnya kurang
dari 1 meter) dan diaplikasikan untuk keperluan survey GEODESI ataupun
2.2.2 Sistem Satelit GPS
Untuk menginformasikan posisi user, 24 satelit GPS yang ada di orbit sekitar 12,000
mil di atas kita. Bergerak konstan bergerak mengelilingi bumi 12 jam dengan
kecepatan 7,000 mil per jam. Satelit GPS berk ekuatan energi sinar matahari,
mempunyai baterai cadangan untuk menjaga agar tetap berjalan pada saat gerhana
matahari atau pada saat tidak ada energi matahari. Roket penguat kecil pada
masing-masing satelit agar dapat mengorbit tepat pada tempatnya.
Gambar 2.3 Simulasi Posisi Satelit GPS
Satelit GPS adalah milik Departemen Pertahanan (Department of Defense)
Amerika, adapun hal-hal lainnya:
1. Nama satelit adalah NAVSTAR
2. GPS satelit pertama kali adalah tahun 1978
3. Mulai ada 24 satelit dari tahun 1994
5. GPS satelit beratnya kira-kira 2,000 pounds
6. Kekuatan transmiter hanya 50 watts atau kurang
Satelit-satelit GPS harus selalu berada pada posisi orbit yang tepat untuk menjaga
akurasi data yang dikirim ke GPS reciever, sehingga harus selalu dipelihara agar
posisinya tepat. Stasiun-stasiun pengendali di bumi ada di Hawaii, Ascension Islan,
Diego Garcia, Kwajalein dan Colorado Spring. Stasiun bumi tersebut selalu
memonitor posisi orbit jam satelit dan di pastikan selalu tepat.
2.2.3 Signal Satelit GPS
1. Carriers
Satelite GPS mengirim sinyal dalam dua frekuensi. L1 dengan
1575.42 Mhz dengan membawa dua status pesan dan pseudo-random code
untuk keperluan perhitungan waktu. L2 membawa 1227.60 MHz dengan
menggunakaan presesi yang lebih akurat karena untuk keperluan militer. Daya
sinyal radio yang dipancarkan hanya berkisar antara 20-50 Watts. Ini
tergolong sangat rendah mengingat jarak antara GPS dan satelit sampai
12.000 mil. Sinyal dipancarkan secara line of sight (LOS), dapat melewati
awan, kaca tapi tidak dapat benda padat seperti gedung, gunung.
2. Pseudo-Random Codes
GPS yang digunakan untuk publik akan memantau frekuensi L1 pada
memiliki pola-pola kode digital tertentu yang disebut sebagai pseudorandom.
Sinyal yang dikirimkan terdiri dari dua bagian yaitu kode Protected (P) dan
Coarse/Acquisition (C/A). Kode yang dikirim juga unik antar satelit, sehingga
memungkinkan setiap receiver untuk membedakan sinyal yang dikirim oleh
satu satelit dengan satelit lainnya. Beberapa kode Protected (P) juga ada yang
diacak, agar tidak dapat diterima oleh GPS biasa. Sinyal yang diacak ini
dikenal dengan istilah Anti Spoofing, yang biasanya digunakan oleh GPS
khusus untuk keperluan tertentu seperti militer.
3. Navigation Message
Ada sinyal frekuensi berkekuatan lemah yang di tambahkan pada kode
L1 yang memberikan informasi tentang orbit satelit, clock correction satelit
dan status sistem lainnya
2.2.4 Cara Ker ja GPS
Setiap daerah di atas permukaan bumi ini minimal terjangkau oleh 3-4 satelit. Pada
prakteknya, setiap GPS terbaru bisa menerima sampai dengan 12 chanel satelit
sekaligus. Kondisi langit yang cerah dan bebas dari halangan membuat GPS dapat
dengan mudah menangkap sinyal yang dikirimkan oleh satelit. Semakin banyak
satelit yang diterima oleh GPS, maka akurasi yang diberikan juga akan semakin
tinggi. Cara kerja GPS secara logik ada 5 langkah:
2. Untuk perhitungan “triangulation”, GPS mengukur jarak menggunakan travel
time sinyal radio.
3. Untuk mengukur travel time, GPS memerlukan memerlukan akurasi waktu
yang tinggi.
4. Untuk perhitungan jarak, kita harus tahu dengan pasti posisi satelit dan
ketingian pada orbitnya.
5. Terakhir harus menggoreksi delay sinyal waktu perjalanan di atmosfer sampai
diterima receiver.
Gambar 2.4 Bagaimana satelit GPS mengirim sinyal
Satelit GPS berputar mengelilingi bumi selama 12 jam di dalam orbit yang
akurat dia dan mengirimkan sinyal informasi ke bumi. GPS reciever mengambl
informasi itu dan dengan menggunakan perhitungan “triangulation” menghitung
lokasi user dengan tepat. GPS reciever membandingkan waktu sinyal di kiirim
dengan waktu sinyal tersebut di terima. Dari informasi itu didapat diketahui berapa
jarak satelit. Dengan perhitungan jarak jarak GPS reciever dapat melakukan
Sebuah GPS reciever harus mengunci sinyal minimal tiga satelit untuk
memenghitung posisi 2D (latitude dan longitude) dan track pergerakan. Jika GPS
reciever dapat menerima empat atau lebih satelit, maka dapat menghitung posisi 3D
(latitude, longitude dan altitude). Jika sudah dapat menentukan posisi user,
selanjutnya GPS dapat menghitung informasi lain, seperti kecepatan, arah yang
dituju, jalur, tujuan perjalanan, jarak tujuan, matahari terbit dan matahari terbenam
dan masih banyak lagi.
Satelit GPS dalam mengirim informasi waktu sangat presesi karena Satelit
tersebut memakai jam atom. Jam atom yang ada pada satelit jalam dengan partikel
atom yang di isolasi, sehingga dapat menghasilkan jam yang akurat dibandingkan
dengan jam biasa.
Perhitungan waktu yang akurat sangat menentukan akurasi perhitungan untuk
menentukan informasi lokasi kita. Selain itu semakin banyak sinyal satelit yang dapat
diterima maka akan semakin presesi data yang diterima karena ketiga satelit
mengirim pseudo-random code dan waktu yang sama.
Ketinggian itu menimbulkan keuntungan dalam mendukung proses kerja GPS
bagi kita karena semakin tinggi maka semakin bersih atmosfer, sehingga gangguan
semakin sedikit dan orbit yang cocok dan perhitungan matematika yang cocok. Satelit
harus teptap pada posisi yang tepat sehingga stasiun di bumi harus terus memonitor
setiap pergerakan satelit, dengan bantuan radar yang presesi salalu di cek tentang
2.2.5 Bagaimana sinyal dapat menentukan lokasi
Apa hubungan antara sinyal yang dikirimkan oleh satelit dengan cara GPS
menentukan lokasi? Sinyal yang dikirimkan oleh satelit ke GPS akan digunakan
untuk menghitung waktu perjalanan (travel time). Waktu perjalanan ini sering juga
disebut sebagai Time of Arrival (TOA). Sesuai dengan prinsip fisika, bahwa untuk
mengukur jarak dapat diperoleh dari waktu dikalikan dengan cepat rambat sinyal.
Maka, jarak antara satelit dengan GPS juga dapat diperoleh dari prinsip fisika
tersebut. Setiap sinyal yang dikirimkan oleh satelit juga akan berisi informasi yang
sangat detail, seperti orbit satelit, waktu, dan hambatan yang terjadi di atmosfir
selama pengiriman sinyal tersebut. Satelit juga dilengkapi dengan jam atom dimana
jam ini diklaim merupakan satuan waktu paling presisi dengan tingkat penyimpangan
maksimalnya 1 milidetik.
Untuk dapat menentukan posisi dari sebuah GPS secara dua dimensi (latitude
dan longitude), dibutuhkan minimal tiga buah satelit. Empat buah satelit akan
dibutuhkan agar didapatkan lokasi ketinggian (altitude). Setiap satelit akan
memancarkan sinyal yang akan diterima oleh GPS receiver. Sinyal ini akan
dibutuhkan untuk menghitung jarak dari masing-masing satelit ke GPS. Dari jarak
tersebut, akan diperoleh jari-jari lingkaran jangkauan setiap satelit. Lewat
perhitungan matematika yang cukup rumit, interseksi (perpotongan) setiap lingkaran
jangkauan satelit tadi akan dapat digunakan untuk menentukan lokasi dari GPS di
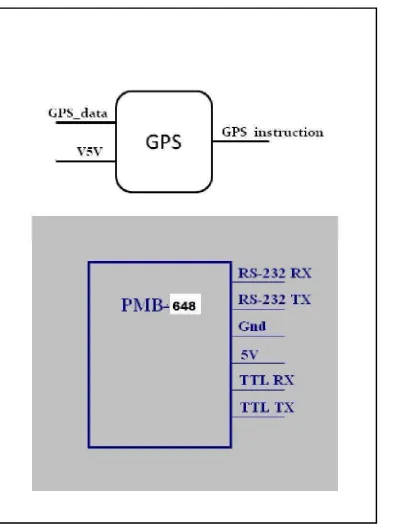
2.3 GPS Modul PMB 648
GPS PMB-648 adalah modul mini GPS produksi Polstar sebuah fabrikan alat-alat
elektro di Taiwan dengan arsitektur 6 pin berdimensi 2.3x2.3. Digunakan sebagai
penangkap sinyal GPS dari satelit, dilengkapi built in antena dengan output TTL
ataupun RS-232.
Adapun blok diagram modul GPS PMB-648 adalah [4]:
Gambar 2.6 Bentuk fisik PMB-648
Gambar 2.5 Blok diagram PMB-648
Dari gambar 2.5 dapat diketahui bahwa PMB-648 memiliki konstruksi sebagai
berikut :
1. RS-232 Receiver
3. Ground pin
4. Pin input daya
5. TTL transmitter
6. TTL receiver
Beberapa fitur yang dimiliki PMB48 adalah :
• Built-in SiRFstarIII.
• Built-in WAAS /EGNOS Demodulator.
• Konsumsi daya rendah dan ukuran yang kecil hanya 32x32mm.
• Support NMEA0183 v2.2 data protocol.
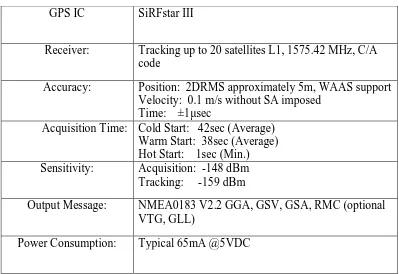
Spesifikasi modul GPS PMB-648 [5] :
Tabel 2.1 Spesifikasi Modul GPS PMB-648
GPS IC SiRFstar III
Receiver: Tracking up to 20 satellites L1, 1575.42 MHz, C/A code
Accuracy: Position: 2DRMS approximately 5m, WAAS support Velocity: 0.1 m/s without SA imposed
Time: ±1μ sec
Acquisition Time: Cold Start: 42sec (Average) Warm Start: 38sec (Average) Hot Start: 1sec (Min.) Sensitivity: Acquisition: -148 dBm
Tracking: -159 dBm
Output Message: NMEA0183 V2.2 GGA, GSV, GSA, RMC (optional VTG, GLL)
2.4 Sistem Koor dinat
Pengenalan tentang sistem koordinat sangat penting agar dapat menggunakan
GPS secara optimum. Setidaknya ada dua klasifikasi tentang sistem koordinat yang
dipakai oleh GPS maupun dalam pemetaan yaitu : sistem koordinat global yang biasa
disebut sebagai koordinat GEOGRAFI dan sistem koordinat di dalam bidang proyeksi.
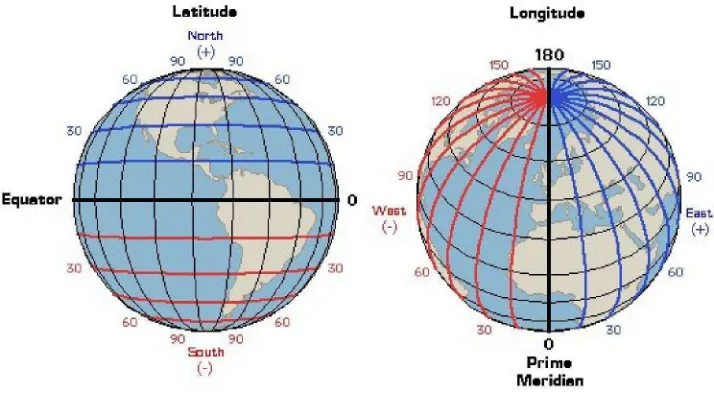
• Koordinat GEOGRAFI diukur dalam lintang dan bujur dalam besaran derajad
desimal, derajad menit desimal, atau derajad menit detik. Lintang diukur
terhadap equator sebagai titik NOL (0° sampai 90° positif kearah utara dan 0°
sampai 90° negatif kearah selatan). Bujur diukur berdasarkan titik NOL di
Greenwich 0° sampai 180° kearah timur dan 0° sampai 180° kearah barat.
Gambar 2.7 Latitude dan Longitude
Dari gambar 2.7 dapat diketahui bahwa latitude adalah garis vertikal yang
dan selatan, sedangkan longitude adalah garis horisontal yang membentang
dari utara keselatan dan membelah bumi menjadi dua bagian barat dan timur
• Koordinat di dalam bidang proyeksi merupakan koordinat yang dipakai pada
sistem proyeksi tertentu. Umumnya berkait erat dengan system proyeksinya,
walaupun adakalanya (karena itu memungkinkan) digunakan koordinat
GEOGRAFI dalam bidang proyeksi. Beberapa sistem proyeksi yang lazim
digunakan di Indonesia di antaranya adalah : proyeksi Merkator, Transverse
Merkator, Universal Tranverse Merkator (UTM), Kerucut Konformal.
Masing-masing sistem tersebut ada kelebihan dan kekurangan, dan pemilihan proyeksi
umumnya didasarkan pada tujuan peta yang akan dibuat. Dari beberapa sistem
proyeksi tersebut, proyeksi Tranverse Merkator dan proyeksi Universal
Tranverse Merkator-lah yang banyak dipakai di Indonesia.
2.5 Mikrokontr oller ATmega 8535
Mikrokontroller adalah suatu keping IC dimana terdapat mikroprosesor dan
memori program ROM (Read Only Memory) serta memori serbaguna RAM (Random
Access Memory), bahkan ada beberapa jenis mikrokontroller yang memiliki fasilitas
ADC, PLL, EEPROM dalam satu kemasan. Penggunaan mikrokontroller dalam
bidang kontrol sangat luas dan populer.
Ada beberapa vendor yang membuat mikrokontroller diantaranya Intel,
tersebut, yang paling populer digunakan adalah mikrokontroller buatan Atmel.
Mikrokontroller AVR (Alf and Vegard’s Risc Prosesor) memiliki arsitektur RISC 8
bit, dimana semua instruksi dikemas dalam kode 16-bit (16-bits word) dan sebagian
besar intruksi dieksekusi dalam 1 (satu) siklus clock, berbeda dengan instruksi MSC
51 yang membutuhkan 12 siklus clock. Tentu saja itu terjadi karena kedua jenis
mikrokontroller tersebut memiliki arsitektur yang berbeda. AVR berteknologi RISC
(Reduced Instruction Set Computing), sedangkan seri MCS 51 berteknologi CISC
(Complex Instruction Set Computing). Secara umum AVR dapat dikelompokkan
menjadi 4 kelas, yaitu keluarga AtTiny, keluarga AT90Sxx, keluarga ATMega dan
AT86RFxx. Pada dasarnya yang membedakan masing-masing kelas adalah kapasitas
memori pada arsitektur microcontroller, peripheral dan fungsinya. Dari segi arsitektur
dan instruksi yanng digunakan, mereka bisa dikatakan hampir sama. Oleh karena itu
dipergunakan salah satu AVR produk Atmel yaitu ATMega 8535. Selain lebih mudah
didapatkan dan lebih murah ATMega 8535 juga memiliki fasilitas yang lengkap.
Untuk tipe AVR ada 3 jenis yaitu AT Tiny, AVR klasik dan AT Mega. Perbedaanya
hanya pada fasilitas dan Input Output yang tersedia serta fasilitas lain seperti ADC,
EEPROM dan lain sebagainya. Salah satu contohnya adalah ATMega 8535. Memiliki
teknologi RISC dengan kecepatan maksimal 16 Mhz membuat ATMega 8535 lebih
cepat bila dibandingkan dengan ukuran MCS 51. Dengan fasilitas yang lengkap
tersebut menjadikan ATMega 8535 sebagai mikrokontroler yang handal. Adapun
Gambar 2.8 Blok Diagram ATMega 8535 Gambar 2.9 Fisik ATMega 8535
Dari gambar 2.2 dapat dilihat bahwa ATMega 8535 memiliki kontruksi bagian
sebagai berikut :
1. ADC 10 bit sebanyak 8 saluran.
2. Tiga buah timer/counter dengan kemampuan pembandingan
3. CPU yang terdiri atas 32 buah register.
4. Watchdog timer dengan osilator internal.
5. SRAM saluran I/O sebanyak 32 buah yaitu Port A, Port B, Port C dan Port
D sebesar 512 byte.
7. Unit interupsi internal dan eksternal.
8. Port antar muka SPI.
9. EEPROM sebesar 512 byte yang dapat di program saat operasi
10.Antarmuka komparator analog.
11.Port USART untuk komunikasi serial fitur ATMega 8535.
Kapabilitas detail dari ATMega 8535 adalah sebagai berikut :
1. Sistem mikroprosesor 8 bit berbasis RISC dan memiliki kecepatan
maksimal 16 Mhz.
2. Kapasitas memori flash 8 KB, SRAM sebesar 512 byte dan EEPROM
(Electrically Eraseble Programable Read Only Memory) sebesar 512
byte.
3. ADC internal dengan fasilitas 10 bit sebanyak 8 chanel.
4. Portal komunikasi serial (USART) dengan kecepatan maksimal 2.5 Mbps.
5. Enam pilihan mode sleep menghemat penggunaan daya listrik.
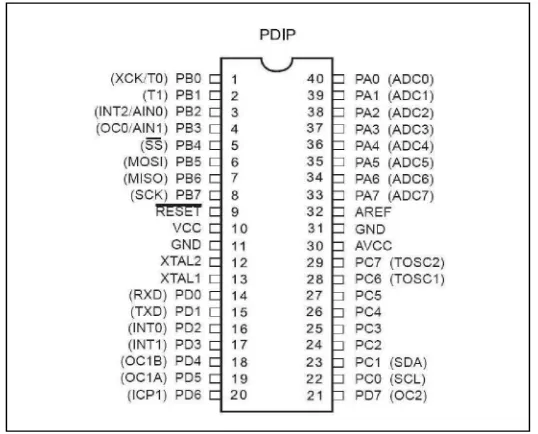
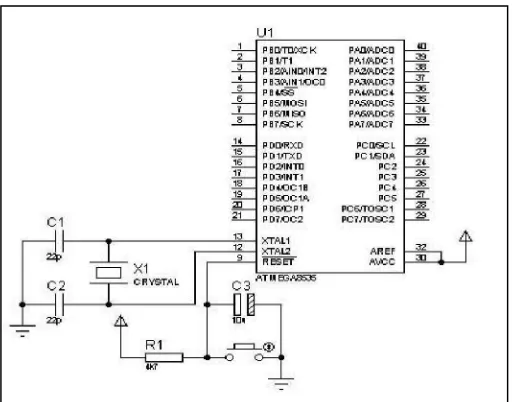
2.5.1 Konfigur asi Pin ATMega 8535
Konfigurasi pin ATMega 8535 dengan kemasan sebanyak empat port A, B, C, D
dengan pembagian 1 sampai dengan 40 pin DIP (dual in-line package ) dengan 7 pin
yang mempunyai fungsi khusus dimana beberapa pin mempunyai karakteristik dan
fungsi yang berbeda-beda, untuk konfigurasi pin At-mega 8535 sendiri bisa dilihat
Gambar 2.10 Konfigurasi Pin ATMega 8535
Dari gambar tersebut dapat dijelaskan secara fungsional konfigurasi pin pada
ATMega 8535 sebagai berikut :
1. VCC merupakan pin yang berfungsi sebagai pin masukan catu daya.
2. GND merupakn pin ground.
3. Port A (PA0...PA7) merupakan pin I/O dua arah dan pin masukan ADC.
4. Port B (PA0...PB7) merupakan pin I/O dua arah dan pin fungsi khusus
yaitu Timer/Counter, Komperator analog dan SPI.
5. Port C (PC0...PC7) merupakan pin I/O dua arah dan pin khusus yaitu
TWI, Komperator Analog dan Timer Oscillator.
6. Port D (PD0...PD7) merupakan pin I/O dua arah dan pin fungsi khusus
yaitu komperator analog, interupsi eksternal dan komunikasi serial.
8. XTL1 dan XTAL2 merupakan pin masukan clock eksternal.
9. AVCC merupakan masukan untuk tegangan ADC.
10.AREF merupakan pin masukan tegangan refrensi ADC.
Berikut adalah penjelasan fungsi tiap kaki.
1. PORT A
Merupakan 8-bit directional port I/O. Setiap pinnya dapat menyediakan
internal pull-up resistor (dapat diatur per bit). Output buffer port A dapat
memberi arus 20 mA dan dapat mengendalikan display LED secara
langsung. Data Direction Register Port A (DDRA) harus disetting terlebih
dahulusebelum port A digunakan. Bit-bit DDRA diisi 0 jika ingin
memfungsikan pin-pin port A yang bersesuaian sebagai input atau diisi 1
jika sebagai output. Selain itu kedelapan pin port A juga digunakan untuk
memasukan sinyal analog bagi A/D coverter.
2. PORT B
Merupakan 8 bit directional port I/O. Setiap pinnya dapat menyediakan
internal pull-up resistor (dapat diatur per bit). Output buffer port B dapat
memberi arus 20 mA dan dapat mengendalikan display LED secara
langsung. Data Direction Register Port B (DDRB) diisi 0 jika ingin
memfungsikan pin-pin port B yang bersesuaian sebagai input, atau diisi 1
jika sebagai output. Port B juga memiliki untuk fungsi alternatif seperti
Tabel 2.2 Fungsi Alternatif Port B
Por t Pin Fungsi Khusus
PB0 T0 = timer/counter 0 external counter input PB1 T1 = timer/counter 0 external counter input PB2 AIN0 = analog comparator positive input PB3 AIN1 = analog comparator negative input PB4 SS = SPI slave select input
PB5 MOSI = SPI bus master output/slave input PB6 MISO = SPI bus master input/slave output PB7 SCK = SPI bus serial clock
3. PORT C
Merupakan 8-bit directional port I/O. Setiap pinnya dapat menyediakan
internal pull-up resistor (dapat diatur per bit). Output buffer port C dapat
memberi arus sebesar 20 mA dan dapat mengendalikan display LED
secara langsung. Daya Direction Register Port C (DDRC) harus disetting
terlebih dahulu sebelum port C digunakan. Bit-bit DDRC diisi 0 jika ingin
memfungsikan pin-pin port C yang sesuai sebagai input atau diisi 1 jika
sebagai output. Selain itu dua pin port C (PC6 dan PC7) juga memiliki
fungsi alternatif sebagai oscilator untuk timer/counter 2.
4. PORT D
Merupakan 8-bit directional port I/O. Setiap pinnya dapat menyediakan
internal pull-up resistor (dapat diatur per bit). Output buffer port D dapat
diberi arus sebesar 20 mA dan dapat mengendalikan display LED secara
dahulu sebelum port D digunakan. Bit-bit DDRD diisi 0 jika ingin
memfungsikan pin-pin port D yang bersesuaian sebagai input atau diisi 1
jika sebagai output. Selain itu pin-pin port D juga memiliki fungsi untuk
alternatif khusus seperti yang dapat dilihat dalam tabel berikut [7] :
Tabel 2.3 Fungsi Alternatif Port D
Por t Pin Fungsi Khusus
PD0 RDX ( UART input line ) PD1 TDX ( UART output line ) PD2 INT0 ( external interrupt 0 input ) PD3 INT1 ( external interrupt 1 input )
PD4 OC1B ( timer/counter 1 output compare B match output )
PD5 OC1A ( timer/counter 1 output compare A match output )
PD6 ICP ( timer/counter 1 input capture pin )
PD7 OC2 (timer/counter 2 output compare match output )
5. RESET
RST pada pin 9 merupakan reset dari AVR. Jika pada pin ini diberi
masukan low selama minimal 2 mechine cycle maka sistem akan di-reset.
Dan akan kembali pada posisi awal.
6. XTAL1
XTAL1 adalah masukan ke inverting oscilator amplifier dan input ke
internal clock operating circuit.
7. XTAL2
8. Avcc
Avcc adalah kaki masukan tegangan bagi A/D converter. Kaki ini harus
secara eksternal terhubung ke Vcc melalui lowpass filter.
9. AREF
AREF adalah kaki masukan referensi bagi A/D Converter. Untuk
operasional ADC, suatu level tegangan antara AGND dan Avcc harus
diberikan kaki ini.
10.AGND
AGND adalah kaki untuk analog ground. Hubungkan kaki ini ke GND,
kecuali jika board memiliki analog ground yang terpisah.
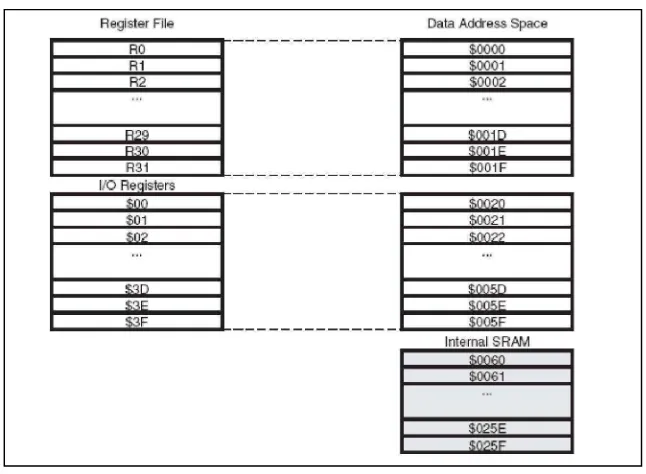
2.5.2 Peta Memor i Mikr okontr oler ATMega 8535
AVR ATMega 8535 memiliki ruang pengalamatan memori data dan memori
program yang terpisah. Memori data terbagi menjadi 3 bagian yaitu 32 buah register
umum, 64 buah register I/O dan 512 byte SRAM internal.
Register keperluan umum menempati space data pada alamat terbawah yaitu
$00 sampai $1F. Sementara itu register khusus untuk menangani I/O dan control
terhadap mikrokontroler menempati 64 alamat berikutnya yaitu mulai dari $20 hingga
$5F. Register tersebut merupakan register yang khusus digunakan mengatur fungsi
terhadap berbagai peripheral mikrokontroler, seperti contoh register, timer/counter,
Alamat memori berikutnya digunakan untuk SRAM 512 byte yaitu pada
lokasi $60 sampai $25F. Konfigurasi memori data pada ATMega 8535 ditunjukkan
pada gambar dibawah ini [6].
Gambar 2.11 Memori Data ATMega 8535
Memori program yang terletak dalam flash Perom tersusun dalam word atau
2 byte karena setiap interuksi memiliki lebar 16-bit atau 32-bit, AVR ATMega 8535
memiliki Kbyte 12-bit program counter (PC) sehingga mampu mengalamati isi flash.
Selain itu AVR ATMega 8535 juga memiliki memori data berupa EEPROM 8-bit
sebanyak 512 byte. Alamat EEPROM dimulai $000 sampai $1FF.
2.5.3 Pengena la n USART ATmega8535
USART (Universal Syschronous Asynchronous Received Transmitter)
ATMega8535. USART memiliki 2 pin (RxD dan TxD) untuk Asynchronous dan 3 bit
TxD, RxD, xCK untuk Synchronous.
Untuk mengatur komunikasi USART dilakukan melalui beberapa register yaitu :
• UDR (USART Data Register)
adalah register yang paling penting dalam komunikasi serial ini. Sebab data
yang dikirim keluar harus ditempatkan pada register ini, sedang data yang
diterima dari luar dapat dibaca pada register ini pula. Pada intinya register
UDR digunakan sebagai buffer untuk menyimpan data, baik yang akan
dikirim maupun yang akan diterima.
Gambar 2.12 Pengalamat register USART
Seperti yang dapat dilihat pada gambar, sebenarnya UDR adalah terdiri dari 2
buah register terpisah, dengan alamat dan nama yang sama, yakni UDR. Saat
kita menulis data pada UDR ini, maka sebenarnya kita menulis data pada
UDR (Write) yang kemudian USART mem-frame dengan bit-bit frame dan
segera akan segera mengirimkan data tersebut secara serial. Saat kita
membaca UDR, sebenarnya adalah membaca UDR (Read). Data yang
diterima secara serial akan disimpan dalam register tersebut, setelah hadirnya
UDR (Read ) sehingga dapat segera di ambil. Kita dapat menggunakan
instruksi OUT dan IN untuk menulis dan membaca register UDR ini.
• UCSRA (USART Control dan Status Register A)
adalah register yang penting. Sebegian besar adalah berisi status dari dari
proses transfer komunikasi serial itu sendiri. Adapun penjelasan dari bit-bit
tersebut adalah:
Gambar 2.13 Pengalamatan register UCSRA
Berikut ini adalah keterangan tiap bit pada gambar diatas :
§ Bit 7 – RxC: USART Receive Complete
Bit ini menjadi tinggi jika ada data yang masih belum diambil atau dibaca di
dalam buffer penerima ( UDR-read ). Bit ini akan otomatis rendah setelah
buffer penerima telah dibaca. Jika Unit Penerima tiba-tiba dimatikan setelah
diaktifkan, maka isi dalam buffer penerima akan langsung dibuang (flushed)
dan bit RxC ini akan langsung dibuat rendah. Bit ini juga bisa mengaktifkan
instrupsi “Receive Complete interrupt ”. Lihat penjelasan tentang bit RxCIE.
Untuk mengetahui penerimaan data jika high (1) ada data baru dan jika low
(0) tidak ada data baru.
§ Bit 6 – TxC: USART Transmit Complete
Bit ini akan otomatis tinggi saat semua frame dalam shift-register saat
berada didalam buffer pengiriman (UDR-write). Bit TxC ini akan secara
otomatis rendah setelah “Transmit Complete interrupt ” dijalankan, atau
dengan meng-clearkan secara manual dengan cara menulis bit ini dengan nilai
1’s (tinggi). Bit TxC ini juga dapat membangkitan “Transmit Complete
interrupt ”. Bisa kita lihat pada penjelasan tentang bit TxCIE. Untuk
mengetahui pengiriman data, jika high (1) berarti ada data baru dan jika low
(0) diartikan tidak ada data baru.
§ Bit 5 – UDRE: USART Data Register Empty
Bit UDRE ini digunakan untuk menjadikan tanda jika buffer pada pengiriman
(UDR-write) telah siap untuk diberikan data baru. Bit ini akan bernilai 1
(tinggi) , berarti kita saat itu diperbolehkan menulis UDR. Bit ini dapat
membangkitkan UDRIE atau “Data Register Empty interrupt ”. Bisa kita lihat
pada penjelasan tentang bit UDRIE. Bit ini setelah me-reset maka langsung
bernilai 1, yang diartikan bahwa telah siap untuk melakukan pengiriman
selanjunya.
§ Bit 4 – FE: Frame Error
Bit ini otomatis menjadi tinggi jika saat menerima data, tapi ternyata ada
kesalahan dari frame yang diterima sebelumnya. Misalnya saat Unit penerima
seharusnya menunggu sebuah bit Stop, ternyata data yang ada adalah 0
(rendah). Bit ini valid setelah kita membaca UDR. Harap selalu menulis bit ini
§ Bit 3 – DOR: Data OverRun
Bit ini akan menjadi tinggi saat kondisi overrun terjadi. Kondisi ini terjadi
saat buffer penerima sudah penuh dan berisi 2 data karakter, dimana data
karakter terakhir tidak bisa dipindahkan ke UDR-read, karena tidak kunjung
dibaca oleh user. Bit ini valid setelah kita membaca UDR. Harap selalu
menulis bit ini dengan 0 (rendah ) saat kita sedang menulis UCSRA.
§ Bit 2 – PE: Parity Error
§ Bit 1 – U2X: Double the USART Transmission Speed
Bit ini hanya berlaku untuk operasi tak sinkron (asynchronous). Jika bit ini
kita tulis dengan 1’s (tinggi) maka baud rate akan menjadi lebih cepat 2 kali.
Hal itu terjadi karena pembagi baud rate yang biasanya membagi 16 kemudian
menbagi menjadi dengan 8 saja. Tulis bit ini dengan 0’s (rendah) untuk oprasi
sinkron (synchronous).
§ Bit 0 – MPCM: Multi-processor Communication Mode
Bit ini digunakan untuk mode komunikasi Multi-Prosesor. Saat bit PMCM ini
namun tidak dilengkapi dengan informasi alamat, data yang benar, maka akan
diabaikan. Bit ini hanya berguna untuk penerima, dan bukan untuk pengirim.
• UCSRB (USART Control dan Status Register B)
Adalah register yang penting. Sebagian besar adalah berisi status dari dari
proses transfer komunikasi serial itu sendiri. Adapun penjelasan dari bit-bit
tersebut adalah:
Gambar 2.14 Pengalamatan register UCSRB
• UCSRC (USART Control dan Status Register C)
Regsiter ini adalah register penting, untuk melakukan kontrol pada peralatan
USART. Namun jika tidak menggunakan fungsi USART, maka boleh
mengabaikan register ini seperti dalam keaadaan resetnya. dengan nilai $96,
yang berarti bahwa sedang meggunakannya sebagai UART, Parity-none, 1
stop bit, ukuran data 8-bit (UCSZ2 = 0).
Register UCSRC adalah berbagi alamat I/O yang sama dengan register
UBBRH. Lihat bagaimana mengakses UBBRH dan UCSRC pada “Accessing
UBRRH/UCSRC Registers” untuk mendapatkan penjelasan lebih lengkap.
• UBRR (USART Baud Rate Register)
akhirnya kita mendapati register yang menentukan baud rate dari peralatan
USART yang kita gunakan. Sebagaimana biasanya, baud rate antara AVR
(sumber) dan device target haruslah sama. Hal ini menjadi sangat penting agar
tidak ada transfer data palsu yang isinya diluar kemauan.
Gambar 2.16 Pengalamatan register UBRR
Register UBRRH adalah berbagi alamat I/O yang sama dengan register
UBBRH. Lihat bagaimana mengakses UBBRH dan UCSRC pada “Accessing
UBRRH/UCSRC Registers” untuk mendapatkan penjelasan lebih lengkap.
2.6 Motor Ser vo Standar t Sebagai Aktuator Kemudi
Penggunaan motor servo standart difungsikan untuk pengaturan arah kemudi,
sehingga stang kemudi tetap stabil saat robot berjalan. Servo adalah sebuauh motor
kembali ke rangkaian control yang ada di dalam motor servo. Motor ini terdiri dari
sebuah motor DC, serangkaian gear, potensiometer dan rangkaian control.
Potensiometer berfungsi untuk menentukan batas sudut dari putaran servo.
Sedangakan sudut dari sumbu motor servo diatur berdasarkan lebar pulsa yang
dikirim melalui kaki sinyal dari kabel motor [4].
Gambar 2.17 Motor Servo Standart
Pengendalian gerakan batang motor servo dapat dilakukan dengan menggunakan
metode PWM (Pulse Width Modulation). Teknik ini dari sumbu motor servo diatur
berdasarkan lebar pulsa yang dikirim melalui kaki sinyal dari kabel motor. Tampak
pada gambar dengan pulsa 1,5 ms pada periode selebar 2 ms maka sudut dari sumbu
motor akan berada pada posisi tengah. Semakin lebar pulsa OFF maka akan semakin
besar gerakan sumbu ke arah jarum jam dan semakin kecil pulsa IFF maka akan
semakin besra sumbu ke arah jarum jam dan semakin kecil pulsa OFF maka akan
semakin besar gerakan sumbu ke arah yang berlawanan dengan jarum jam.
Untuk menggerakkan motor servo ke kanan atau ke kiri, tergantung dari nilai
1,5 ms. Untuk memutarkan servo ke kanan, berikan pulsa ≤ 1,3 ms dan pulsa ≥ 1,7
ms untuk berputar ke kiri dengan delay 20 ms.
2.7 LCD Dot Matr ik [8]
LCD adalah sebua display dot matrix yang digunakan untuk menampilkan
tulisan berupa angka atau huruf sesuai gengan yang di inginkan (sesuai dengan
program yang digunakan untuk mengontrolnya). LCD yangdigunakan adalah LCD
dot matrix dengan karakter 2 x 16, sehingga kaki kakinya berjumlah 16 pin.
LCD sebagaimana output yang dapat menampilkan tulisan sehingga lebih
mudah di mengerti, dibandingkan jika menggunakan LED saja. Tampilan LCD terdiri
dari dua bagian, yakni bagian panel LCD yang terdiri dari banyak “titik”. LCD dan
sebuah mikrokontroler yang menempel di panel dan berfungsi mengatur “titik-titik”
LCD tadi menjadi huruf atau angka yang terbaca, berikut gambar fisik LCD dot
matrik [8] :
Gambar 2.18 LCD matrik 2x16
Huruf atau angka yang akan ditimpalikan dikirim ke LCD dalam bentuk kode
menjadi”titik-titik” LCD yang terbaca sebagai huruf satu angka. Dengan demikian tugas
mikrokontroler pemakai LCD hanyalah mengirimkan kode-kode ASCII untuk
ditampilkan. fungsional konfigurasi pin pada LCD adalah sebagai berikut:
1. Vss - di hubungkan ke 0 v (ground).
2. Vcc – di hubungkan dengan tegangan supply +5v.
3. Vee – di gunakan untuk mengatur tingkat kontras LCD.
4. RS H/L bernilai logika ”0” untuk input instruksi dan bernilai logika 1 untuk
input data.
5. R/W H/L bernilai logika ”0” untuk proses” write” dan bernilai logika 1 untuk
proses ”read”
6. EH merupakan sinyal enable. Sinyal ini akan aktif pada failing edge dari
logika ”1” ke logika ”0”.
7. DB0 H/L pin data D0
8. DB1 H/L pin data D1
9. DB2 H/L pin data D2
10.DB3 H/L pin data D3
11.DB4 H/L pin data D4
12.DB5 H/L pin data D5
13.DB6 H/L pin data D6
15.V+BL – back light pada LCD ini dihubungkan dengan tegangan sebesar 4-4,2
V dengan arus 50-200 mA
43
Bab ini menjelaskan tentang tahapan-tahapan pembuatan tugas akhir yang
berjudul “Robot Becak Berbasis GPS (Global Positioning Sistem)” diantaranya
terkait tentang perencanaan sistem, perangkat keras (meliputi mekanik dan perangkat
elektronika) dan perangkat lunak (meliputi algoritma sistem dan perencanaan
program).
3.1 Tahap Pembua ta n Robot Becak
Tahap pembuatan robot pada tugas akhir ini secara umum terbagi mejadi tiga
bagian :
1. Tahap Perencanaan
Dalam tahap ini, penulis merencanakan robot yang akan dibuat
2. Tahap Pembuatan
Ada tiga perkerjaan yang harus dilakukan dalam tahap ini, yaitu pembuatan dan
merangkai mekanik, perangkaian komponen elektronik, dan terakhir adalah
programming.
3. Uji coba
Setelah kita mendownload program ke mikrokontroler (otak robot) berarti kita
Untuk lebih jelas dalam pemaparan tahapan diatas maka dibuat flowchart
seperti dibawah ini :
Gambar 3.1 Flowchart Tahapan Pembuatan Robot becak
Dari gambar 3.1 di atas dapat di jelaskan sebagai berikut:
• Perencanaan : dalam hal ini penulis merencanakan pembuatan robot mulai
dari sistem mekanik, pemilihan rangka mekanik, pembuatan, perakitan serta
penentuan komponen-komponen rangkaian elektronik, serta penentuan bahasa
pemrograman yang akan dipakai dalam robot becak
• Pembuatan mekanik: meliputi pemilihan serta modifikasi rangka mekanik, hal
ini bertujuan agar robot bekerja sesuai dengan perencaan pada poin satu.
• Pembuatan rangkain elektonik : meliputi penyusunan komponen elektronika
yang diperlukan dalam sebuah board PCB, lalu dilakukan uji coba pada
rangkaian tersebut apakh sudah berjalan sesuai dengan yang direncakan.
• Pembuatan sourcecode : pemilihan bahasa yang akan dipakai dalam
pemrograman, serta perencanaan dalam sebuah flowchart, lalu dilakukan uji
coba pada program apakah sudah sesuai dengan yang direncanakan.
3.2 Blok Diagram Sistem
Perancangan sistem dari tugas akhir ini mempunyai konfigurasi blok diagram
sistem seperti gambar 3.2 dengan alur kerja sistem sebagai berikut.
a. Servo digunakan sebagai penggerak kemudi, menjaga agar stang kemudi tetap
lurus.
b. Motor DC digunakan sebagai penggerak robot, dimana sebagai pengendalian
kecepatan menggunakan driver dengan memanfaatkan IC L293D.
c. Modul GPS PMB 648 digunakan Sebagai alat penerima sinyal
d. Mikrokontroler ATmega 8535: Menjadi pusat pengolah data, baik
menyeleksi data maupun mengatur kinerja dari modul lain.
e. LCD digunakan sebagai alat untuk menampilkan koordinat hasil dari olahan
ATmega8535.
Gambar 3.2 Blok Diagram Sistem
Dari sistem tersebut diketahui bahwa sistem terintegrasi antara mekanik,
actuator dan kontroler.Sehingga setiap adanya hambatan atau kesalahan pada salah
satu bagian tersebut membuat sistem tidak dapat berjalan dengan semestinya.
3.2.1 Pera nca ngan Per angkat Keras
Perancangan perangkat keras pada plant robot becak ini meliputi
mikrokontroler AVR ATmega 8535, Modul GPS, Max 232, LCD dan rangkaian
catu daya. Pada bagian ini data yang dikirimkan berupa informasi titik
koordinat pada suatu tempat, diharapkan bisa diterima oleh bagian penerima
untuk diproses, disimpan dan ditampilkan pada layar (LCD) .
Selanjutnya pembahasan mengenai perancangan perangkat keras akan dibagi
dalam dua bagian yaitu mengenai desain mekanik dan pengaturan antarmuka
(interface) perangkat elektronik, baik mengenai modul, dan minimum sistem yang
digunakan.
3.2.2 Mikrokontr oller AT mega 8535
Pada tugas akhir ini menggunakan mikrokontroler ATmega 8535 ditujukan
untuk memberikan perintah ke GPS PMB-648 untuk menerima data serial dari GPS
dan menampilkannya pada LCD. Gambar rangkaian sistem minimum ATmega 8535
dapat di lihat pada gambar 3.3
Gambar 3.3 Rangkaian Sistem Minimum ATmega 8535
Table 3.1 menunjukkan penggunaan pin-pin pada mikrokontroller ATmega 8535
3.2.3 Modul GPS PMB-648
Modul GPS PMB-648 memiliki sensitifitas tinggi untuk pencarian sinyal
SiRFstarII™ dengan dua pilihan sumber tegangan yang dapat digunakan yaitu
3.3V sampai 5V. Pada rangkaian, modul GPS PMB-648 Modul GPS receiver akan
bekerja pada output UART (protokol NMEA 0183) dengan transfer rate 4800bps.
menghadap ke langit) dan diperlukan waktu sekitar 48 detik setelah catu daya
dinyalakan untuk mendapat sinyal dari satelit.
diberi tegangan 5V dan tegangan antenna sebesar 3V karena catu daya yang
digunakan sebesar ±5V. gambar rangkain modul PMB-648
Gambar 3.4 rangkaian sistem PMB-648
Keluaran pada pin 5 (TXDA) adalah data serial berupa karakter yang
mempunyai identitas. Identitas dapat diartikan sebagai nama header yang akan
dikirim berikutnya. Contoh header yang dihasilkan sebagai keluaran oleh modul GPS
PMB 648 adalah $GPRMC, $GPGGA, $GPGGL, $GPRMA Dan $GPRMB data
sedangkan yang akan dipakai dalam proyek tugas akhir ini adalah header dengan
satuan $GPRMC yang benilai 0-5 dengan menunjukan identitas (GPRMC) dan data
berikutnya mulai dari 6..56 merupakan urutan data informasi posisi GPS. Untuk lebih
jelasnya di tunjukkan oleh tabel 3.2
Tabel 3.1 Header GPRMC pada GPS
LCD digunakan untuk menampilkan informasi. Informasi yang disajikan
dengan mode 4 bit dengan tujuan untuk penghematan port, selain itu kondisi
default inisialisasi LCD dari Code Vision AVR menggunakan 4 bit.
Gamba r 3.5 Rangkaian Sistem pada LCD
Untuk menampilkan data dari mikrokontroller AT Mega 8535 pada layar
LCD, dapat menggunakan semua Port yang tersedia pada ATmega baik port A, port
B, port C, maupun port D. Cara kerja menggunakan LCD :
Langkah 1 : inisialisai LCD
Langkah 2 : arahkan pada alamat yang di kehendaki
Langkah 3 : tuliskan data ke LCD, maka karakter akan muncul pada alamat
tersebut
3.2.5 Max 232
Kegunaan IC MAX232 adalah sebagai driver, yang akan mengkonversi
level tegangan pada modem komunikasi yang digunakan. IC yang dipakai pada
sistem ini memiliki 16 pin dengan tegangan sebesar 5 Volt. Gambar rangkaian MAX
232 dapat dilihat pada gambar 3.5
Gambar 3.6 Rangkaian Max 232
Pada dasarnya IC ini memerlukan komponen tambahan berupa kapasitor ekternal
yang dipasangkan pada pin-pin tertentu. Kapasitor ini merupakan rangkaian baku
yang berfungsi sebagai charge pump untuk menyuplai muatan ke bagian pengubah
tegangan, dimana nilai setiap kapasitor yang dipakai bernilai 1uf
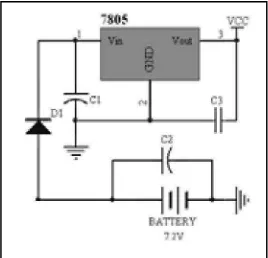
3.2.6 Catu Daya
Catu daya adalah faktor pendukung yang sangat penting, karena
mikrokontroler, modul-modul dan sensor dapat bekerja karena adanya tegangan.
Untuk mencatu semua modul yang terpasang maka diperlukan tegangan sebesar
5V DC. Tegangan yang digunakan berasal dari baterai rechargeable yang
mempunyai nilai tegangan 1.2 Volt per satu baterai. Tegangan total 7,2 Volt
tegangan 5 volt maka diperlukan sebuah IC regulator LM7805. Dengan tegangan
sumber 7,2 Volt IC ini mampu memberikan output tegangan yang sesuai yaitu
berkisar antara 5 Volt (nilai terukur 4.9 Volt). Gambar rangkaian dapat di lihat
pada gambar 3.6.
Gambar 3.7 Rangkaian Catu Daya
3.2.7 Desa in Mekanik
Perancangan mekanik pada sistem ini, didasarkan pada bentuk becak dengan
tiga roda dengan tempat duduk penumpang disebelah kiri, sehingga untuk
pemasangan minimal sistem, modul, peletakan motor servo dan motor DC harus
disesuaikan dengan kontruksi becak.
Dudukan motor servo dan minimal sistem menggunakan bahan acrilyc.
Karena bahan-bahan tersebut cocok untuk digunakan dalam mendesain robot, ringan
tapi kuat dan mudah dibentuk.Penggunaan bahan-bahan tersebut dikarenakan mudah
didapat dan dengan harga yang terjangkau. Di bawah ini skema kontruksi robot
a. Tampak Samping b. Tampak Atas Gambar 3.8 Skema Konstruksi Robot Becak
Dari gambar 3.4 dapat dijelaskan struktur konstruksi dari robot becak antara lain :
1. Kode “A” adalah jarak sumbu roda, pemasangan as roda harus sempurna
untuk mendapatkan putaran roda yang setabil.
2. Kode “B” adalah jarak roda depan dan belakang.
3. Kode “C” adalah panjang penampang dudukan minimal sistem. Panjang
penampang ini disesuaikan dengan panjang dari board minimal sistem.
4. Kode “D” adalah lebar penampang dudukan minimal sistem. Lebar
penampang ini disesuaikan dengan lebar penampang board minimal sistem.
Sehingga nilai estetika dari becak sendiri tidak terlalu banyak berubah.
5. Kode “E” adalah diameter masing-masing roda.
Dengan memperhatikan setiap detail dari kontruksi becak, maka diharapkan
akan menghasilkan robot yang dapat bergerak secara setabil dan dinamis. Karena
kesetabilan kinerja robot tidak dapat dititik beratkan pada satu bagian saja, seperti
yang sudah dijelaskan pada pembahasan awal bab III
B
E
A
Untuk lebih memperjelas dari mekanik robot becak di bawah ini adalah gambar
mekanik utama robot yang diambil dari tiga arah.
Gambar 3.9 Mekanik Robot Tampak Atas
Dari gambar 3.9 minimal sistem dapat terpasang pada dudukan penumpang
ujung kiri paling belakang, hal ini dilakukan untuk penghematan tempat pada papan
acrylic.
Desain motor servo diletakkan antara tempat duduk pengemudi dengan
kemudi becak, hal ini hanya bertujuan untuk menjaga kemudi tetap lurus serta untuk
pengembangan robot becak pada tahap selanjutnya.
Gambar 3.10 Posisi Komponen
1
2
Bat terey
GPS
M inimum sist em
Pada gambar 3.10 dapat dilihat mekanik robot dari sisi atas, angka 1 adalah
baterai RC 7.4 V 1100 mAH dengan factor pengali 20 C. baterai tersebut akan
mensupplay tegangan untuk mikroprosessor, LCD dan modul GPS pada robot becak.
Pada angka 2 menunjukkan posisi modul GPS sebagai receiver sinyal NMEA
yang hasilnya akan diolah oleh mikro dan selanjutnya ditampilkan pada layar LCD.
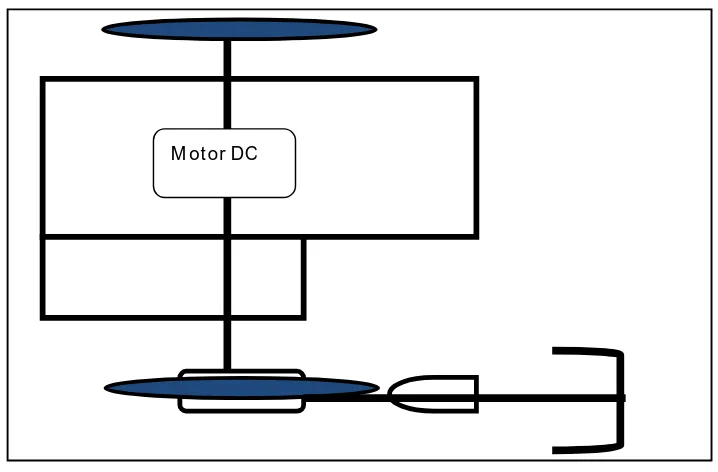
Gambar 3.11 Mekanik Robot Tampak Bawah
Dari bawah dapat terlihat motor DC yang telah terpasang dengan roda gila
(gear box), dimana roda gila ini bertujuan untuk membantu meningkatkan torsi dari
motor DC, sehingga dapat menggerakkan roda robot.
Penggunaan motor DC dikarenakan motor ini harganya relatif murah dan
torsinya cukup tinggi, untuk kendali putarannya dapat diatur dengan menggunakan
rangkaian motor driver dengan memanfaatkan IC L293D.
3.3 Pera nca ngan Per angkat Lunak
Robot yang di buat pada tugas akhir ini adalah robot yang bertugas untuk
menentukan pososinya sendiri dimuka bumi dengan memanfaatkan signal GPS.
Perangkat lunak (software) yang dibutuhkan untuk mengintegrasikan menjadi satu
sistem utuh yang dibangun dengan menggunakan bahasa C pada CodeVisionAVR.
Penggunaan bahasa C dimaksudkan untuk mempermudah pemrograman.
Dibanding assembler, bahasa C lebih mudah dibaca dan dimengerti. Salah satu IDE
(Intregated Development Environment) yang cukup membantu dalam mempelajari
mikrokontroler AVR RISC 8 bit dengan bahasa C adalah CodeVision AVR.
Kelebihan CodeVision AVR adalah pada kemudahan manajemen berkas dan proyek
dalam sebuah IDE serta fitur code wizard yang salah satunya bisa digunkan untuk
konfigurasi port secara otomatis sehingga membantu menghasilkan rentetan kerangka
sourcecode untuk keperluan secara umum.
Kebutuhan perangkat lunak meliputi masing-masing tugas mikrokontroller
yang berfungsi untuk membaca instrument USART yang diberikan oleh modul GPS
untuk kemudian data tersebut disimpan dan di cek kelengkapannya untuk kemudian
diambil data yang diperlukan, dimana pada proyek tugas akhir ini data yang diambil
adalah besaran koordinat lintang dan bujur berdasarkan perhitungan selisih waktu
pada jam satellite dan jam receiver dari diterimanya sinyal satelit serta delay ketika
sinyal tersebut yang diterima oleh GPS receiver. Hasil pembacaan setelah diolah
3.4 Pera nca ngan alur ker ja system
Menentukan proses yang akan dilakukan dalam perancangan perangkat
lunak, merupakan hal yang sangat penting agar sistem dapat bekerja dengan
baik. Berikut adalah diagram alur system dalam program utama mulai dari proses
awal switch d hidupkan sampai sampai pembacaan koordinat ditampilkan oleh LCD
akan ditunjukkan pada gambar 3.12
Gambar 3.12 Diagram alur kerja sistem
Dari Gambar 3.5 dapat dijelaskan dari awal ketika switch ON ditekan maka
akan dilanjutkan dengan inisialisasi port LCD dan GPS, saat buffering GPS receiver
setidaknya mengunci minimal 3 sinyal satelit untuk mendapatkan data yang berbeda
pada hitungan posisi tetap sebuah titik yaitu koordinat posisi lintang dan bujur biasa
disebut data 2D jika proses buffering ini tidak berhasil maka akan kembali pada
inisialisasi GPS, selanjutnya adalah parsing data GPS dimana hasil buffering
selanjutnya disebut $GPRMC ditampilkan ke LCD.
3.5 Pemr ograman pada ATmega 8535
Pemrograman pada Mikrokontroler ATmega 8535 Pada pemrograman
mikrokontroler, digunakan bahasa pemrograman bahasa C dengan program code
vision Avr. Setiap file yang dibuat akan disimpan dengan extension *.prj. File
yang telah di compile akan menghasilkan file baru dengan extension *.hex. File
ini kemudian dimasukan ke dalam flash mikrokontroler melalui alat Flash
loader Microcontroller, dengan terlebih dahulu men-setting com yang dipakai oleh
USB loader pada computer sebelum melakukan langkah loader program kedalam
mikrokontroller.
Gambar 3.13 Diagram Blok Flash Program
3.6 Flowcha r t Pr ogr am Sistem Pada Robot Becak Ber basis GPS
Menentukan proses apa saja yang akan dilakukan dalam perancangan
perangkat lunak pada program utama, merupakan hal yang sangat penting agar
sistem dapat bekerja dengan baik. Berikut adalah diagram alir program utama
yang akan disematkan kedalam mikrokontroler pada bagian pembacaan data GPS
FLOWCHART
Gambar 3.14 Flowchart Program Utama
- Strat
- Tekan tombol switc ON tombol ditekan,
- Inisialisasi port, semua port yang di pakai
- Jika uart valid, f==1