PENGEMBANGAN PROGRAM PENGOLAHAN CITRA
REAL-TIME
UNTUK DETEKSI RINTANGAN PADA
TRAKTOR TANPA AWAK
IRRIWAD PUTRI
SEKOLAH PASCASARJANA INSTITUT PERTANIAN BOGOR
PERNYATAAN MENGENAI TESIS DAN
SUMBER INFORMASI SERTA PELIMPAHAN HAK CIPTA
Dengan ini saya menyatakan bahwa tesis berjudul Pengembangan Program Pengolahan Citra Real-time untuk Deteksi Rintangan pada Traktor Tanpa Awak adalah benar karya saya dengan arahan dari komisi pembimbing dan belum diajukan dalam bentuk apa pun kepada perguruan tinggi mana pun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir disertasi ini.
Dengan ini saya melimpahkan hak cipta dari karya tulis saya kepada Institut Pertanian Bogor.
Bogor, Juli 2013
RINGKASAN
IRRIWAD PUTRI. Pengembangan Program Pengolahan Citra Real-time untuk Deteksi Rintangan pada Traktor Tanpa Awak. Dibimbing oleh USMAN AHMAD dan DESRIAL.
Sensor deteksi rintangan merupakan komponen yang penting dalam pengembangan traktor otomatis dalam rangka mengenal lingkungannya. Pengujian dari beberapa penelitian pada kendaraan dan robot otomatis memperlihatkan bahwa terdapat hanya lima sampai enam perbedaan jenis sensor deteksi rintangan yang efektif. Sensor-sensor ini dapat diurutkan mulai dari harga yang murah sampai sangat mahal. Sensor-sensor ini memiliki perbedaan manfaat yang unik pada berbagai aplikasi. Jika sebuah sensor dapat secara efektis digunakan untuk membangun peta lingkungan kendaraan, maka aplikasi sensor deteksi rintangan pada lingkungan pertanian akan memungkinkan. Sensor ini antara lain kamera CCD, Sensor ultrasonik (sonar), Scanning laser, 3D Sccanning Laser, dan Milimeter Wave Radar
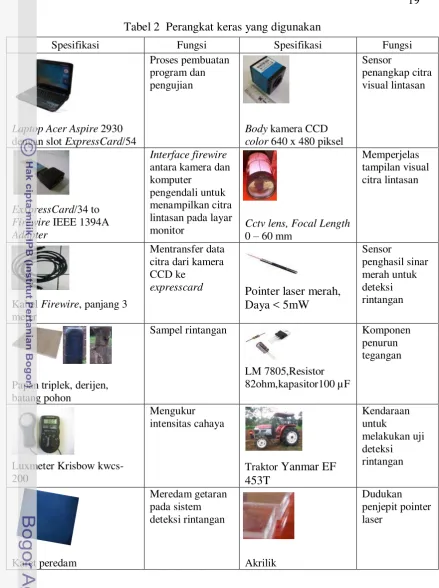
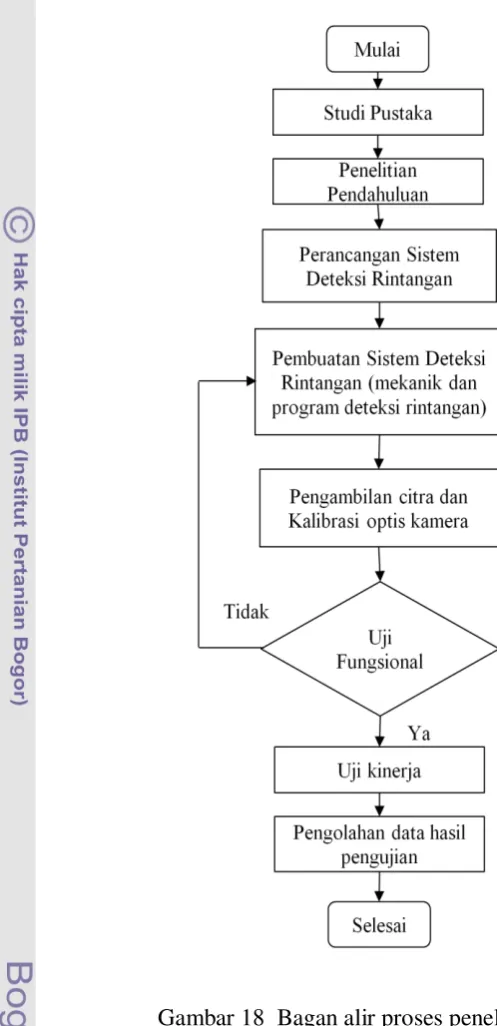
Penelitian ini bertujuan untuk mengembangkan algoritma pengolahan citra real-time yang akan digunakan sebagai penghindaran rintangan pada traktor tanpa awak. Peralatan yang digunakan pada penelitian ini dapat dibagi menjadi dua katagori, yaitu berupa hardware dan software. Peralatan hardware meliputi Traktor Yanmar EF453T, Laptop acer Aspire 2930 dengan slot Express card, ccd camera dan cctv lens, express card d/34 to firewire IEEE 1394A Adapter, kabel firewire, papan (triplek), pointer laser merah dengan daya < 5mW, LM 7805, resistor 82 ohm, kapasitor 100 µF, luxmeter, dan akrilik. Sedangkan software yang digunakan adalah Visual C#, SharpDevelop versi 3.2, dan Paint Shop Pro versi 6. Tahapan dalam penelitian ini adalah sebagai berikut, seperti identifikasi masalah, perancangan sistem deteksi rintangan traktor, pembuatan sistem deteksi rintangan traktor, pengambilan nilai RGB statik dan dinamik, uji kalibrasi dan validasi optis kamera, uji fungsional, uji kinerja statis dan dinamis.
Teknik pengolahan citra yang meliputi proses binerisasi dan dilasi berhasil memberikan citra biner yang sempurna. Titik putih pada citra biner merupakan titik yang digunakan untuk mendeteksi adanya rintangan. Sistem ini mampu mengenal rintangan yang berada pada lintasan traktor sehingga mampu memberikan perintah untuk jalan terus, belok kiri, belok kanan, dan berhenti. Traktor yang mendeteksi rintangan pada jarak kurang dari 7 m akan memberikan perintah pada traktor agar belok kiri jika rintangan berada di bagian kanan dan tengah, belok kanan jika rintangan di bagian kiri, berhenti apabila rintangan berada di sepanjang lintasan, dan berjalan terus apabila tidak terdapat rintangan pada lintasan. Namun traktor akan jalan terus apabila rintangan berada pada jarak lebih dari 7 m.
sistem pendeteksi rintangan dalam membaca jarak rintangan tersebut. Total akurasi sistem deteksi rintangan real-time adalah 67.4%. Pengolahan citra deteksi rintangan secara real-time mengalami kesulitan. Apabila intensitas matahari terlalu tinggi, maka sistem tidak dapat mengenali rintangan dan hal ini akan berbahaya pada traktor.
SUMMARY
IRRIWAD PUTRI. Development of Real-time Image Processing Program to Detect Obstacles for Unmanned Tractor. Supervised by USMAN AHMAD and DESRIAL.
Obstacle detection sensor is an important task for development of autonomous vehicles in recognizing its environment. An examination of various research studies on autonomous vehicles/robots shows that there are only five to six different types of effective obstacle detection sensors. These sensors ranged in price from inexpensive to very expensive. Each of them has their own unique advantages and disadvantages for different applications. If a sensor can be effectively used to create accurate maps for the vehicle environment then applying of such sensor on detection of obstacles in farming environment would be possible. The sensors were consisted of CCD camera, Ultrasonic sensors, Scanning laser, 3D Scanning lasers, and Millimeter wave radar.
The purpose of this research was to develop the algorithm of real-time image processing that will be used as obstacles avoidance for unmanned tractor. The equipments in this research were divided into two catagories, including hardware and software platforms. The hardware consisted of Yanmar Tractor EF453T types, Acer Aspire 2930 with Express card slot, CCD camera, cctv lens, express card d/34 to fire wire IEEE 1394A Adapter, fire wire cable, tripleks wood, red pointer laser<5mW, LM 7805, resistor 82 ohm, capacitor 100 µF, luxmeter, and akrilik. While the software consisted of Visual C#, Sharp Develop 3.2 version, and Paint Shop Pro 6 version. The procedure used in present study consisted of the following steps, such as identifying a problem through observation, designing a system for obstacle detection system of unmanned tractor, fabrication of obstacle detection system, capturing the RGB (Red, Green, Blue) values in both static, and dynamic conditions, testing the calibration and validation of optical camera, functional testing, testing the static and real-time performances on unmanned tractor.
Image processing techniques such as threshold, erotion, and dilation has achieved successfully to get perfect binary image. The white drop in binary image was then used to detect potential obstacle. Our system is capable to recognize an obstacle in tractor path so that it could give a motion command such as advance, turn left, turn right, or stop. For instance, if the tractor detects the obstacle at less than 7 m then the system would give the command to turn left if the obstacle located in right tractor path. In contrast, it would command to turn right if the obstacle position located in the left tractor path. In case of the obstacle is located at throughout the tractor path, the system would give a command to stop. However, if there is an obstacle in the path tractor, but its range is more than 7 m, the system would give the tractor command to advance.
position pointer laser move from fix position. In spite of the sensor position is little move it can make the system fail or inaccurate to read the range value of obstacle. Total accurate for the real-time obstacle avoidance found in current study was 67.4 %. The development of real-time image processing for detection obstacle in outdoor is rather difficult because of its solar intensity. When the solar intensity is high, the system failed to recognize the obstacle and it would be danger for the tractor.
© Hak Cipta Milik IPB, Tahun 2013
Hak Cipta Dilindungi Undang-Undang
Dilarang mengutip sebagian atau seluruh karya tulis ini tanpa mencantumkan atau menyebutkan sumbernya. Pengutipan hanya untuk kepentingan pendidikan, penelitian, penulisan karya ilmiah, penyusunan laporan, penulisan kritik, atau tinjauan suatu masalah; dan pengutipan tersebut tidak merugikan kepentingan IPB
Tesis
sebagai salah satu syarat untuk memperoleh gelar Magister Sains
pada
Program Studi Teknik Mesin Pertanian dan Pangan
PENGEMBANGAN PROGRAM PENGOLAHAN CITRA
REAL-TIME
UNTUK DETEKSI RINTANGAN PADA
TRAKTOR TANPA AWAK
IRRIWAD PUTRI
SEKOLAH PASCASARJANA INSTITUT PERTANIAN BOGOR
Judul Tesis : Pengembangan Program Pengolahan Citra Real-time untuk Deteksi Rintangan pada Traktor Tanpa Awak
Nama : Irriwad Putri NIM : F151100051
Disetujui oleh Komisi Pembimbing
Dr. Ir. Usman Ahmad, M.Agr Ketua
Dr. Ir. Desrial, M.Eng Anggota
Diketahui oleh
Ketua Program Studi Teknik Mesin Pertanian dan Pangan
Dr. Ir. Setyo Pertiwi, M.Agr
Dekan Sekolah Pascasarjana
Dr Ir Dahrul Syah, MScAgr
PRAKATA
Alhamdulillahirabbilalamiin, segala puji dan syukur penulis sampaikan kepada Allah SWT atas semua karunia, limpahan kesehatan, dan kekuatan sehingga karya ilmiah ini dapat diselesaikan. Penelitian ini bertemakan Pengembangan Program Pengolahan Citra Real-time pada Deteksi Rintangan untuk Traktor Tanpa Awak. Penelitian ini dibiayai sepenuhnya oleh Program Hibah Kompetisi IMHERE B2c IPB tahun 2010 hingga 2012.
Pada kesempatan ini penulis mengucapkan terimakasih kepada Bapak Dr. Ir. Usman Ahmad, M.Agr dan Dr. Ir. Desrial, M.Eng sebagai komisi pembimbing yang telah banyak memberikan ilmu, arahan dan saran-saran yang sangat membantu untuk penulis mulai dari awal penelitian hingga penyusunan tesis ini. Dr. Ir. I Dewa Made Subrata, M.Agr dan Dr. Ir. Setyo Pertiwi, M.Agr selaku penguji luar komisi dan ketua Program Studi Teknik Mesin Pertanian dan Pangan yang telah banyak memberikan masukan untuk pengembangan tesis ini.
Penulis menyampaikan ucapan terimakasih pada program I-MHERE B2.c IPB atas biaya penelitian yang telah diberikan. Ucapan rasa syukur dan terimakasih tak terhingga penulis ucapkan kepada Ayahanda Darinas Abdullah dan Ibunda Warnis, keluarga Uda Ib, Uda In, Uda Il, dan Uni Is serta Eko Mujiono atas semua bantuan, arahan, dan pengorbanan yang diberikan kepada penulis. Disamping itu, penulis juga menyampaikan terimakasih dan penghargaan tak terhingga kepada seluruh rekan-rekan yang telah banyak membantu selama penelitian ini, seluruh rekan-rekan di Teknik Mesin Pertanian dan Pangan 2010 dan 2011 terutama Kak Tahir Sapsal dan Cecep Saepul Rahman atas semua bantuan dan ilmu yang diberikan selama penulis melakukan penelitian.
Semoga tesis ini dapat dimanfaatkan sebaik-baiknya untuk perkembangan ilmu pengetahuan.
DAFTAR ISI
Aplikasi Sensor Deteksi dan Pengolahan Citra Real-Time pada Traktor
Pertanian 14
Perancangan Sistem Deteksi Rintangan Traktor 32
Pembuatan sistem deteksi rintangan traktor 33
Pengambilan Citra dan Kalibrasi Optis Kamera 36
DAFTAR TABEL
1 Perbedaan lima sensor yang digunakan untuk mendeteksi rintangan
(Gray 2010) 9
2 Perangkat keras yang digunakan 19
3 Batasan nilai normaslisasi RGB citra rintangan papan (triplek) pada
setiap jarak pengambilan 39
4 Rumusan batas luasan binerisasi pada laser 1 dan 6 41 5 Jarak rata-rata pusat piksel laser 1, 2, 3, 4, 5, dan 6 terhadap koordinat
pusat citra 44
6 Sebaran nilai normalisasi (rgb) objek pada lintasan 47 7 Sebaran nilai normalisasi (rgb) sinar laser merah dengan rintangan
batang pohon 48
8 Rata-rata besar akurasi dan error sistem deteksi rintangan pada proses
validasi 49
9 Konsistensi masing-masing laser dalam mendeteksi rintangan 52 10 Contoh sebaran nilai normalisasi sinar laser merah yang tidak terdeteksi
pada citra biner 60
11 Total akurasi sistem deteksi rintangan secara real-time 67
DAFTAR GAMBAR
1 Traktor mini dengan: (a) Portal Crop Scouting Platform oleh Madsen dan Jakobsen (2001) dan (b) sub canopy robot ISAAC2 yang dikembangkan oleh tim mahasiswa Hohenheim University (Blackmore
et al 2005). 5
2 Penggunaan kamera CCD sebagai sensor dalam navigasi dan deteksi rintangana pada: (a) robot indoor HERMES (Bischof 1999) dan (b)
nomad robot (Subramanian 2006) 7
3 Penggunaan laser scanner pada SydNav mobile robot (Bailey 1999) 8 4 Gambaran visual dari: (a) 3D Scanning laser, (b) objek sebagai
rintangan, dan (c) hasil pembacaan scanning (Surmann 2001) 8 5 Perangkat keras untuk pengolahan citra beserta aliran datanya (Ahmad
2005) 10
6 Contoh dari pengukuran jarak (atas) dan bentuk transformasi citra biner ke jarak (bawah); (a) euclidean, (b) city-block dan (c) chess board
(Ahmad 2005) 12
7 Hubungan fungsi trigonometri 13
8 Ilustrasi perhitungan jarak kamera dan citra dengan menggunakan
prinsip triangulasi 13
9 Tampilan (a) Traktor-robot DEDALO (b) gambar detail 2D laser range
finder dan visual kamera (Alegri 2011) 14
10 Tampilan citra (a) visual pemandangan outdoor, (b) representasi sudut-jarak laser, dan (c) tampilan visual dari dua benda yang terdeteksi oleh laser pada kisaran jarak 1-8 m dan dipetakan pada frame visual putih
11 (a) citra visual dari penggabungan kamera-laser, (b) segmentasi visual citra oleh region growing algorithm (jarak objek diwakili oleh warna
buatan) 15
12 Citra hasil transformasi HIS (hue, saturation, and intensity) (Torri
2000) 15
13 Kamera CCD dan laser sensor diatas cabin traktor untuk memandu navigasi kendaraan otomatis (Subramanian 2006) 16 14 Hasil Machine vision pada barisan tanaman jeruk: (a) gambar asli, (b)
segmentasi kanopi, dan (c) batas jalur (Subramanian 2006) 16 15 Tampilan citra (a) kondisi jalan sebenarnya dan (b) ekstraksi dan
prediksi batas titik objek (Chen dan Tsai 1999) 17
16 Set-up pengujian lahan (Rahman 2013) 17
17 Pegujian sistem navigasi: (a) lintasan lurus tanpa simpangan, (b)lintasan lurus dengan penggunaan simpangan awal, (c) lintasan persegi panjang, (d) pengolahan tanah menggunakan rotary harrower
(Rahman 2013) 18
18 Bagan alir proses penelitian 20
19 Dudukan kamera perekam dan pointer laser beserta bagian-bagiannya 21 20 Pengaturan penempatan pointer laser pada dudukan: (a) tampak
samping dan (b) dan tampak atas 21
21 Bagan alir algoritma pengolahan citra pada sistem real-time 23 22 Bagan alir tahapan pengambilan citra rintangan 24 23 Bagan alir tahapan pengambilan citra rintangan batang pohon, manusia,
dan derijen 25
24 Ilustrasi pengambilan citra rintangan pada lintasan: (a) tampak depan
dan (b) tampak atas 26
25 Tampilan visual software PaintShopPro 6 26
26 Tahapan uji kinerja: (a) statis dan (b) real-time 28 27 Pointer laser (a) sinar merah dan (b) hijau dalam citra yang ditangkap
kamera 29
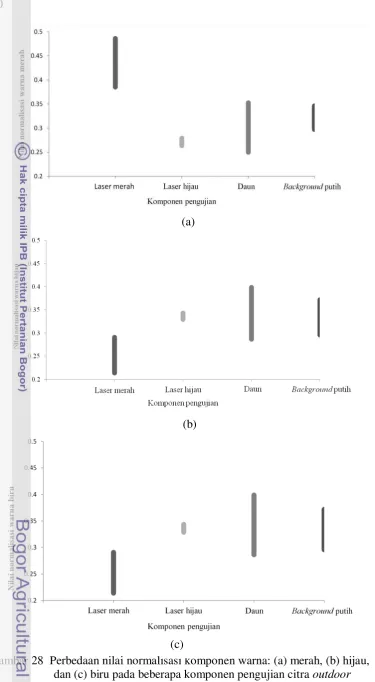
28 Perbedaan nilai normalisasi komponen warna: (a) merah, (b) hijau, dan (c) biru pada beberapa komponen pengujian citra outdoor 30 29 Perbedaan lebar sudut pandang lintasan dengan focal length yang
berbeda pada jarak pemotretan 7 meter 31
30 Perbedaan hasil pemotretan dengan jenis kamera yang berbeda pada
kondisi outdoor 31
31 Komponen penyusun sistem deteksi rintangan 33
32 Penempatan sistem deteksi rintangan pada smart tractor 34 33 Pengembangan program pengolahan citra menggunakan SharpDevelop
versi 3.2 menggunakan bahasa C# 34
34 Tampilan visual pengembangan program pengolahan citra real-time
untuk deteksi rintangan traktor 35
35 Penempatan sistem deteksi rintangan pada smart tractor 36 36 Bentuk lintasan kerja traktor pada proses pengambilan citra rintangan
(a) tampak samping dan (b) tampak depan 37
38 Hasil pengambilan citra rintangan papan (triplek) pada jarak pengambilan (a) 2 m, (b) 3 m, (c) 4 m, (d) 5 m, (e) 6 m, dan (f) 7 m 38
39 Penomoran titik-titik laser pada citra 38
40 Tampilan visual software Paint Shop Pro versi 6 pada pengambilan
nilai RGB citra rintangan papan (triplek) 39
41 Koordinat piksel pusat masing-masing titik laser pada citra beresolusi 640x480 piksel dengan jarak pengambilan 2, 3, 4, 5, 6, dan 7 m 40 42 Visualisasi piksel sinar laser merah pada jarak pengambilan: (a) 2
sampai 7 m, (b) batasan luasan, (c) citra setelah pemisashan luasan, dan (d) citra akhir setelah pemisahan luasan dan binerisasi 42 43 Contoh interface program hasil binerisasi dan batasan luasan citra
rintangan papan (triplek) pada jarak pengambilan 2 m 42 44 Citra biner rintangan papan (triplek) pada jarak pengambilan: (a) 2 m,
(b) 3 m, (c) 4 m, (d) 5 m, (e) 6 m, dan (f) 7 m 43 45 Perhitungan jarak piksel dengan metoda Euclidean 43 46 Grafik besar perubahan jarak titik pusat piksel laser terhadap koordinat
pusat citra untuk setiap laser pada setiap selang jarak pengambilan 44 47 Grafik hubungan jarak titik piksel laser terhadap piksel pusat dengan
jarak pengambilan citra pada lintasan kerja traktor 45 48 Pengambilan nilai RGB citra rintangan: (a) batang pohon, (b dan c)
kulit manusia, (d) kertas merah, (e) kertas putih, dan (f) kertas hijau 46 49 Citra lintasan tanpa rintangan dengan objek: (a) tanah merah, (b) tanah
hitam, (c) rumput hijau muda, dan (d) rumput hijau tua 46 50 Citra dengan rintangan batang pohon pada jarak pengambilan: (a) 2 m,
(b) 3 m, (c) 4 m, (d) 5 m, (e) 6 m, dan (f) 7 m 47 51 Uji fungsional sistem deteksi rintangan pada validasi jarak rintangan 50 52 Tampilan visual program pengolahan citra untuk validasi pada jarak
pengambilan 2 m 50
53 Citra biner hasil uji konsistensi laser pada jarak pengambilan: (a) 2 m, (b) 3 m, (c) 4 m, (d) 5 m, (e) 6 m, dan (f) 7 m 51 54 Citra asli dan citra biner deteksi rintangan dengan lintasan tanpa
rintangan 53
55 Ilustrasi pemberian koordinat tujuan pada lintasan bebas rintangan
dengan resolusi citra 640 x 480 piksel 54
56 Citra asli dan citra biner deteksi rintangan dengan rintangan batang pohon pada laser 1 dan 6 pada jarak pengambilan 2 m 54 57 Citra asli dan citra biner deteksi rintangan dengan rintangan batang
pohon pada laser 2 dan 5 dengan jarak pengambilan 3 m 55 58 Citra asli dan citra biner deteksi rintangan dengan rintangan batang
pohon pada laser 3 dan 4 dengan jarak pengambilan 4 m 55 59 Citra asli dan citra biner deteksi rintangan dengan rintangan manusia
pada laser 3 dan 4 dengan jarak pengambilan 5 m 56 60 Citra asli dan citra biner dengan rintangan jerigen pada laser 4 dengan
jarak pengambilan 6 m 56
61 Citra asli dan citra biner yang disertai noise dengan objek rintangan batang pohon pada laser 1 dan 6 dengan jarak pengambilan 4 m 57 62 Citra asli dan citra biner yang disertai noise dengan objek rintangan
63 Citra asli dan citra biner rintangan manusia pada laser 1 dan 6 dengan
jarak pengambilan 3 m 58
64 Citra asli dan citra biner beberapa rintangan pada laser 4, 5, dan 6
dengan jarak pengambilan 4.5 m 58
65 Kemampuan masing-masing laser dalam mendeteksi rintangan pada
berbagai jarak rintangan 59
66 Citra (a) awal dan (b) citra biner yang mendeteksi rintangan (kotak kuning) dan terdapat noise (kotak merah) dan (b) citra biner yang
mendeteksi rintangan tanpa noise 60
67 Citra hasil pengolahan sistem deteksi rintangan pada masing-masing
jarak pengambilan 61
68 Akurasi pendugaan jarak rintangan pada pengambilan citra statis 62 69 Citra asli dan citra biner rintangan pada uji real-time dengan rintangan
batang pohon pada laser 2 dan 5 63
70 Citra asli dan citra biner rintangan pada uji real-time dengan rintangan
batang pohon dan jerigen 64
71 Citra asli dan citra biner rintangan pada uji real-time dengan rintangan
batang pohon 64
72 Citra asli dan citra biner rintangan batang pohon pada uji real-time
yang mengandung noise 65
73 Ilustrasi keberadaan titik lain (noise) pada citra di luar barisan laser 65 74 Uji kinerja sistem deteksi rintangan real-time pada traktor tanpa awak 66 75 Hasil pengujian deteksi rintangan secara real-time 67
DAFTAR LAMPIRAN
1 Rancangan penempatan sistem deteksi rintangan pada traktor 75 2 Rancangan penempatan kamera beserta komponen-komponennya 76 3 Ditail gambar rangka, dudukan kamera, dan laser (box pelindung 77
4 Ditail dimensi Box pelindung 78
5 Rancangann kesatuan sistem deteksi rintangan 79
6 Dimensi rancangan kesatuan sistem deteksi rintangan 80 7 Nilai normalisasi citra sinar merah laser dengan rintangan papan
(triplek) pada jarak 2 m 81
8 Koordinat piksel setiap nomor laser pada jarak pengambilan citra 2, 3, 4,
5, 6, dan 7 m 93
9 Nilai RGB dan normalisasi berbagai warna latar belakang (rintangan) 94 10 Nilai RGB sinar laser merah pada setiap jarak pengambilan dengan
rintangan pohon 97
11 Nilai normalisasi (rgb) sinar laser merah pada setiap jarak pengambilan
dengan rintangan batang pohon 97
1
1
PENDAHULUAN
Latar Belakang
Operasi dalam bidang pertanian membutuhkan tingkat akurasi dan produktivitas yang tinggi. Peneliti dan pengusaha mengembangkan sistem kontrol mesin untuk mengurangi kebutuhan waktu operasi dan pekerjaan yang membosankan pada lahan pertanian (Ahamed 2006). Salah satu kontrol yang dikembangkan adalah mengenai navigasi otomatis. Penelitian mengenai aplikasi sistem navigasi otomatis pada traktor pertanian merupakan salah satu topik yang banyak diminati pada dua dekade terakhir, terutama di negara-negara maju dalam upaya menerapkan precision farming (PF). Meskipun traktor pertanian otomatis (autonomous farm tractor) bisa direalisasikan, namun masih ada beberapa hal mendasar yang perlu dilakukan. Dua hal mendasar yang penting adalah, bagaimana traktor mengenal lingkungannya dan bagaimana traktor beraksi terhadap lingkungannya (Gray 2000). Traktor tanpa awak (unmanned tractor) meskipun sudah menggunakan teknologi GPS (Global Positioning System) untuk mengenali lintasan kerjanya, namun masih memerlukan kemampuan untuk mengenali medan di depannya agar dapat menghindari rintangan yang mungkin ada dengan tingkat ketelitian yang lebih tinggi (Perez 2008). Easterly et al., (2010), memadukan penggunaan Global Navigation Satelitte System (GNSS) dan sensor penginderaan vision sensing system dengan tingkat ketelitian mencapai 2 in (51 mm) pada kecepatan maju traktor antara 2-5 m/s.
Sensor deteksi rintangan (obstacle detection sensor) merupkan komponen yang vital dalam pengembangan traktor otomatis dalam rangka mengenal lingkungannya. Para peneliti telah menggunakan berbagai macam teknologi sensor untuk mendeteksi rintangan pada lintasan kerja traktor. Gray (2010) mengungkapkan hanya terdapat lima sampai enam perbedaan efektif jenis sensor deteksi rintangan. Sensor-sensor ini dapat diurutkan mulai dari harga yang murah sampai sangat mahal. Masing-masing sensor mempunyai keunggulan dan kelemahan untuk aplikasi yang berbeda-beda. Jika sensor yang digunakan efektif untuk menciptakan peta yang akurat untuk lingkungan kendaraan, maka hal ini memungkinkan untuk digunakan dalam mendeteksi rintangan dalam lingkungan pertanian.
2
seringkali mempunyai warna yang sama dengan warna tanaman sehingga menjadikan kamera tidak berfungsi (Harper 1999).
Dengan adanya permasalahan di atas maka pada penelitian ini dikembangkan suatu sensor deteksi rintangan yang mampu bekerja secara cepat sehingga dapat digunakan dalam kondisi real-time, biaya operasional yang murah, dan dapat dengan mudah membedakan antara warna objek (rintangan) dengan warna background pada gambar. Kamera CCD dan sensor ultrasonik merupakan sensor yang sering digunakan dalam berbagai macam penelitian mengenai deteksi rintangan, terutama pada kendaraan pertanian. Namun sensor ultrasonik memiliki beberapa kekurangan, antara lain menurut Borenstein dan Koren (1998) dalam Gray (2010) menyatakan bahwa sensor ultrasonik akan bekerja secara efektiv apabila berada tegak lurus dengan target (objek) untuk memperoleh data jarak yang benar. Hal ini terjadi karena pantulan energi gelombang tidak akan dibelokkan ke depan sensor jika sensor dan target tidak tegak lurus. Berbeda dengan kamera CCD yang mampu melihat objek dalam berbagai kondisi penempatan objek, yang dalam Hal ini berupa rintangan.
Oleh karena itu maka pada penelitian ini digunakan satu kamera CCD yang dilengkapi sensor laser detection (pointer laser) yang berupa visible light sensor untuk mendeteksi rintangan yang berada di lintasan kerja traktor. Namun demikian citra yang ditangkap oleh kamera perlu mengalami beberapa pengolahan untuk mendeteksi kemungkinan adanya rintangan di depan traktor. Penelitian ini bertujuan untuk mengembangkan algoritma pengolahan citra real-time untuk mendeteksi kemungkinan adanya rintangan pada lintasan kerja traktor tanpa awak tersebut. Penelitian ini merupakan bagian dari penelitian program IMHERE B2c IPB tahun 2010 hingga 2012 yang bertemakan Smart Tractor. Keluaran dari penelitian ini merupakan input ke sistem kemudi otomatik yang telah dikembangkan pada penelitian Rancang Bangun Sistem Kemudi Otomatis Traktor Pertanian Berbasis Navigasi GPS (bagian lain dari penelitian IMHERE B2c IPB 2010-2012). Penggabungan sistem ini nantinya diharapkan berguna ketika sistem GPS mengalami kesalahan dalam pembacaan ataupun adanya rintangan di wilayah kerja traktor sehingga traktor tetap mampu bernavigasi sesuai dengan jalur yang diharapkan.
Perumusan Masalah
3 rintangan. Keputusan mengenai keberadaan dan jarak rintangan akan ditransfer pada traktor yang dikemudikan secara otomatis untuk melakukan navigasi otomatis pada lintasan kerja.
Tujuan Penelitian
4
2
TINJAUAN PUSTAKA
Smart tractor
Perkembangan pertanian membutuhkan cara baru untuk meningkatkan efisiensinya. Salah satu pendekatannya adalah dengan menggunakan teknologi informasi dalam bentuk mesin yang lebih cerdas (intelligent machines) untuk menurunkan energi input dengan cara yang lebih efektif dibandingkan dengan sebelumnya. Munculnya arsitektur sistem otonomi (autonomous system) memberikan kesempatan untuk mengembangkan peralatan pertanian baru yang lebih lengkap berdasarkan mesin cerdas dengan ukuran yang lebih kecil. Traktor cerdas (smart tractor) adalah suatu mesin yang ditambahkan kecerdasan ke dalam mesin tersebut sehingga mampu berperilaku seperti manusia, mampu bekerja dalam waktu yang lama, tanpa adanya pengawasan, dan melakukan kerja yang bermanfaat (Blackmore et. al 20004b).
Ide mengenai robotic agriculture (pelayanan mesin cerdas pada lingkungan pertanian) bukanlah suatu hal yang baru lagi. Sebelumnya telah banyak dikembangkan penelitian dan kajian mengenai traktor tanpa awak namun hasil penelitian tersebut masih belum memuaskan, hal ini dikarenakan terbatasnya kemampuan untuk menjelaskan betapa kompleksnya dunia nyata (Blackmore et al 2004b). Yu (2009) mengembangkan teori chaotic bionics pada pengembangan navigasi otomatis untuk kendaraan tanpa awak (UAV). Multisensor yang terintegrasi digunakan untuk melakukan kontrol pada lingkungan real-time. Saat ini telah dikembangkan mesin cerdas yang kecerdasasannya cukup untuk bekerja pada lingkungan tetap atau semi alami. Mesin tersebut tidak harus bekerja secerdas manusia pada umumnya, namun harus mampu memerankan tingkah laku yang pantas dalam mengenali situasi dan kondisi sekitarnya. Salah satu cara untuk memahami kompleksitas adalah dengan mengenal apa yang dilakukan oleh manusia pada situasi tertentu dan menguraikan tindakan tersebut kedalam kontrol mesin. Metode ini disebut dengan tingkah laku robot dan konsep penerapan pada pertanian (Blackmore et al 2004b).
Pertanian presisi adalah sebuah inovasi yang terintegrasi dan mempunyai tujuan standar secara internasional untuk meningkatkan efisiensi penggunaan sumber daya dan mengurangi kebutuhan yang tidak pasti dengan tujuan akhir untuk mengontrol pertanian yang bervariasi (Schellberg et al 2008). Menurut Shibusawa (1996) dalam Blackmore et al (2005) menyatakan bahwa perlakukan pada tanaman dan tanah secara selektif menurut kebutuhannya oleh mesin otomatis yang berukuran kesil merupakan langkah selanjutnya dalam pengembangan pertanian presisi dalam rangka menurunkan skala lahan menjadi lebih kecil untuk per individu tanaman atau phytotechnology.
5 berjalan secara ekonomis jika dioperasikan pada traktor tanpa kemudi. (Blackmore et al 2004b).
Gambar 1 Traktor mini dengan: (a) Portal Crop Scouting Platform oleh Madsen dan Jakobsen (2001) dan (b) sub canopy robot ISAAC2 yang
dikembangkan oleh tim mahasiswa Hohenheim University (Blackmore et al 2005).
Menurut Rains dan Thomas (2009) ada lima komponen teknologi yang digunakan dalam pertanian presisi, yaitu Geographical Information System (GIS), Global Positioning System (GPS), sensors, variable rate technology, dan, yield monitoring. Sensor yang dipasang pada kendaraan aplikator dapat memberikan data yang dapat digunakan untuk menilai kondisi lapangan dan untuk menentukan (secara keseluruhan atau sebagian) tingkat aplikasi yang diinginkan. Beberapa contoh sensor yang umum digunakan adalah sensor Doppler seperti radar untuk menentukan kecepatan kendaraan aplikator (Sudduth 1999), kamera CCD untuk aplikasi deteksi rintangan (Ahmad 2006; Apostolopoulos et al 1999).
Rintangan
Menurut Robert dan Corke (1999) rintangan merupakan sesuatu yang menyebabkan bahaya dan tindakan yang tidak diinginkan jika terkena kendaraan (kendaraan yang dipasang sistem deteksi rintangan). Terdapat tiga kelas umum yang termasuk rintangan, yaitu manusia, kendaraan lain, rintangan lain yang terdapat pada lintasan. Menurut Ribeiro (2005), berdasarkan ilmu pengetahuan mengenai lingkungan dan posisi tujuan, navigasi robot otomatis mengacu kepada kemampuan robot untuk bergerak dengan aman menuju tujuan menggunakan pengetahuannya dan informasi yang diperoleh sensor dari lingkungan sekitarnya. Meskipun terdapat banyak perbedaan cara pendekatan mengenai navigasi, secara umum sebagian besar cara tersebut membaginya ke dalam hal perencanaan jalur (path planning) dan penghindaran rintangan.
6
Sensor Deteksi Rintangan
Ide mengenai traktor otomatis bukanlah suatu hal yang baru lagi. Dengan menggunakan teknologi GPS dan sistem peralatan pertanian yang berbasis komputer menjadikan mimpi mengenai pertanian otomatis semakin dekat. Secara sederhana pekerjaan yang masih membosankan seperti pembajakan dan pemanenan pada lahan dapat digantikan oleh traktor otomatis yang tidak akan pernah lelah dalam bekerja dan akan melakukan pekerjaan yang diberikan. Kemampuan untuk mengenali lingkungan sekitar merupakan isu terpenting untuk kendaraan otomatis, khususnya traktor pertanian (Gray 2010). Traktor otomatis harus dilengkapi dengan sensor yang dapat mengumpulkan data lingkungan yang cukup yang akan digunakan untuk navigasi kendaraan otomatis dan mempunyai kecepatan kerja yang tinggi dan efektif.
Beberapa penelitian yang telah dilakukan mengenai kendaraan otomatis dan robot diperoleh bahwa terdapat lima sampai enam perbedaan tipe sensor deteksi rintangan yang efektif. Sensor-sensor ini dapat diklasifikasikan mulai dari harga murah sampai yang sangat mahal. Masing-masing sensor ini mempunyai manfaat tersendiri pada masing-masing aplikasinya. Sensor-sensor ini tidak dibatasi untuk pendeteksian rintangan, namun sebagian sensor digunakan untuk lokalisasi kendaraan. Sensor ini juga dapat digunakan untuk mengekstrak perbedaan fitur daun untuk pengenalan tumbuhan yang digunakan dalam proses pemberian pupuk yang tepat, dalam jumlah yang tepat terhadap tumbuhan yang berbeda (Harper 1999). Sensor juga digunakan untuk proses pemetaan dan lokalisasi sebuah robot. Misalnya Horn (1995) menggunakan 3D laser-range-data pada robot untuk melakukan sistem lokalisasi pada robot yang melakukan navigasi secara otomatis. Jika sensor-sensor yang ada dapat digunakan secara efektif untuk membuat peta dari lingkungan kendaraan maka kemungkinannya sensor-sensor ini mampu mendeteksi rintangan pada lingkungan pertanian (Gray 2000). Sensor ini antara lain CCD kamera, Sensor ultrasonik (sonar), Scanning laser, 3D Sccanning Laser, dan Milimeter Wave Radar. Namun pada bagian ini yang dibahas hanya CCD kamera, Scanning Laser, dan3D Scanning Laser.
CCD Kamera
7 pendeteksian rintangan untuk robot pencari meteorit di benua Antartika. Tiga kamera CCD juga digunakan pada robot HERMES III digabungkan dengan penggunaan laser range finder dalam melakukan navigasi otomatis (Andersen et al 1992).
Meskipun stereo vision menyerupai konsep mata manusia, akan tetapi sistem ini mempunyai beberapa kekurangan. Sistem stereo vision membutuhkan penerangan yang bagus, tanpa ini kamera tidak mampu menerangi bidang pandang sehingga menyebabkan rintangan tidak jelas dan bahkan tak terlihat. Selain itu biaya yang dikeluarkan pada sistem ini sangat mahal dan sangat lambat jika digunakan pada kondisi real-time, serta sulitnya membedakan antara latar belakang dan objek rintangan (Gray 2000). Warna latar belakang sering memiliki warna yang sama dengan warna tanaman sehingga kamera tidak berfungsi secara efektif (Harper 1999).
Gambar 2 Penggunaan kamera CCD sebagai sensor dalam navigasi dan deteksi rintangana pada: (a) robot indoor HERMES (Bischof 1999) dan (b) nomad robot (Subramanian 2006)
Beberapa peneliti melakukan penggabungan kamera CCD dengan sensor deteksi rintangan dengan tujuan untuk memperoleh gambaran informasi yang lebih jelas dalam melakukan navigasi otomatis. Wu et al (1996) melakukan penelitian mengenai deteksi rintangan dengan menggunakan kamera CCD dan laser range finder radar (LRFR) dalam rangka mendapatkan informasi mengenai lingkungan. Model 2D lingkungan dibangun dan rintangan pada lintasan dideteksi dengan menggunakan informasi gabungan baik mengenai jarak citra yang diperoleh dari LRFR dan kamera CCD.
Scanning Laser
8
Jenis scanning laser kedua adalah pulse laser yang mengirim banyak pulsa-pulsa laser dan rata-rata dari data jarak pada masing-masing pulsa ini digunakan untuk menentukan jarak ke objek. Laser jenis ini merupakan laser kelas 3 dan aman untuk mata. Keuntungan yang lain dari pulse laser ini adalah error pengukuran dapat diminimalisir dibandingkan dengan beam laser. Bailey (1999) menggunakan laser scanner untuk menentukan posisi dari robot seperti terlihat pada Gambar 3.
Gambar 3 Penggunaan laser scanner pada SydNav mobile robot (Bailey 1999)
3D Scanning Laser
3D scanning laser adalah jenis sensor deteksi yang keempat. Perbedaannya dengan 2D scanning laser adalah jauhnya perbedaan harga dan kerumitannya. Hasil scanning dari 3D scanning laser terlihat sangat menarik, tetapi untuk sistem real-time tidak memungkinkan. Untuk melakukan scan pada resolusi 8000 piksel membutuhkan waktu 80 detik. Kekurangan yang lain dari sensor ini adalah harganya per unit yang mahal. Beberapa 3D scanning laser dengan spesifikasi yang sama harganya bisa mencapai $150,000.00. Harga yang sangat mahal jika digunakan pada kendaraan pertanian meskipun kecepatan scanning nya real-time. Gambar 4 memperlihatkan 3D laser finder pada robot otomatis yang melakukan scanning pada rintangan berupa manusia pada lintasan kerjanya.
9
Tabel 1 Perbedaan lima sensor yang digunakan untuk mendeteksi rintangan (Gray 2010)
Menurut Ahmad (2005) pengolahan citra (image processing) merupakan suatu sistem visual yang mengolah data citra dengan hasil pengolahan berbentuk citra lain yang mengandung atau memperkuat informasi khusus pada citra hasil pengolahan sesuai dengan tujuan pengolahannya. Pengertian pengolahan citra (image processing) sedikit berbeda dengan pengertian mesin visual (machine vision), meskipun keduanya seolah-olah dapat digunakan dengan maksud yang sama. Sedangkan terminologi mesin visual digunakan bila data hasil pengolahan citra langsung diterjemahkan dalam bentuk lain, misalnya grafik yang siap diinterpretasikan untuk tujuan tertentu, gerak peralatan atau bagian dari peralatan mekanis, atau aksi lainnya yang berarti bukan merupakan citra lain.
Citra digital dapat diperoleh secara otomatis dari sistem penangkap citra digital (digital image acquisition system atau digitizen) yang melakukan penjelajahan citra dan membentuk suatu matriks dimana elemen-elemennya menyatakan nilai intensitas cahaya pada suatu himpunan diskrit dari titik-titik. Sistem tersebut merupakan bagian terdepan dari suatu sistem pengolah citra. Sistem penangkap citra digital sendiri terdiri dari tiga komponen dasar, yaitu: sensor citra yang bekerja sebagai pengukur intensitas cahaya, perangkat penjelajah yang bertugas merekam hasil pengukuran intensitas pada seluruh bagian citra, dan pengubah analog-ke-digital yang mengubah harga kontinu menjadi harga diskrit sehingga dapat diproses dengan komputer (Arymurti dan Setiawan 1992).
10
Solid-state image sensor mempunyai sebuah larik elemen foto-elektrik yang dapat membangkitkan tegangan listrik dari photon ketika menerima sejumlah energi cahaya. Sensor jenis ini dapat diklasifikasikan berdasarkan caranya melakukan scanning, yang umumnya dibedakan menjadi dua yaitu jenis charge-couple device (CCD) dan complementary metal-oxide semi conductor (CMOS). Jenis CCD mempunyai kelebihan pada resolusi yang tinggi dan kompensasi dari ketersediaan cahaya yang lemah, sedangkan jenis CMOS mempunyai kelebihan pada bentuk yang kecil dan ringan dengan tetap memberikan hasil citra yang tajam.
Sebuah kamera TV umumnya terdiri dari satu atau lebih sensor citra. Sebuah lensa, dan rangkaian komponen lain seperti pembangkit scanning, penguat (amplifier) dan rangkaian pemroses sinyal. Sebuah kamera warna mungkin mempunyai tiga sensor citra, masing-masing untuk warna merah (red), hijau (green), dan biru (blue), atau mempunyai satu sensor yang dilengkapi dengan filter warna RGB. Untuk pengoperasian di luar ruangan dimana tingkat iluminasi sangat bervariasi dan tergantung pada keadaan lingkungan, sebuah kontrol otomatik untuk diafragma pembukaan lensa mungkin menjadi suatu kelengkapan yang diperlukan, agar citra yang dihasilkan tidak terlalu tinggi variasinya bila terjadi perubahan tingkat iluminasi (Ahmad 2005). Gambar 7 menunjukkan skema perangkat keras pengolahan citra beserta alirannya.
Gambar 5 Perangkat keras untuk pengolahan citra beserta aliran datanya (Ahmad 2005)
11 Perangkat lainnya yang diperlukan adalah unit display untuk monitor citra yang ditangkap oleh kamera, menampilkan citra yang sudah diproses, baik hasil antara maupun hasil akhir. Tanpa kehadiran monitor, pengolahan citra dapat tetap berlangsung karena data citra disimpan dan diproses dalam memori komputer, namun kita tidak dapat menyaksikan proses yang berlangsung untuk melakukan pemeriksaan terhadap proses yang sedang berlangsung (Ahmad 2005).
Perangkat lunak (software) yang digunakan dalam pengolahan citra sangat bergantung pada jenis penangkap bingkai citra yang digunakan. Secara umum, pemrograman pengolahan citra dapat dibedakan menjadi dua, yaitu program tunda, di mana program yang dibuat melakukan manipulasi dan analisis citra yang sudah direkam atau disimpan dalam bentuk file sebelumnya, bukan yang langsung ditangkap oleh kamera. Program jenis ini memanggil file citra yang sudah disimpan berupa bingkai citra ke dalam memori komputer, melakukan manipulasi atau perhitungan terhadap data dalam memori, menyimpan kembali data hasil hasil manipulasi dalam file citra yang baru, atau menampilkan (atau menyimpan) data hasil ekstraksi citra (Ahmad 2005).
Jenis pemograman citra yang ke dua adalah program live atau lebih dikenal dengan sebutan real-time program, yaitu program yang menangkap citra, memindahkan bingkai ke dalam memori komputer, melakukan analisis dan perhitungan, dan menghasilkan citra lain atau lebih sering lagi suatu keputusan, tergantung kepada tujuannya. Keputusan ini biasanya digunakan untuk melakukan aksi, misalnya memberi predikat pada objek yang diambil citranya seperti pada sistem sortasi, atau menggerakkan manipulator untuk memetik buah pada robot pemanen buah, dan sebagainya. Sistem ini disebut dengan mesin visual, karena menghasilkan aksi yang berbeda, bukan lagi citra yang baru. Dengan demikian jelas terlihat bahwa program pengolah citra jenis ini lebih kompleks dibandingkan dengan program yang bersifat tunda, karena selain mempunyai modul-modul pengolah citra, ia juga dilengkapi dengan modul-modul interfacing yang berhubungan dengan bagian atau peralatan lain dari sistem yang diperlukan untuk melakukan aksi yang diinginkan (Ahmad 2005).
Menurut Sommerville (2004) sistem real-time terdiri dari sistem yang memonitor dan mengontrol lingkungan, sistem yang tidak bisa dipisahkan dari komponen hardware berupa sensor dan aktuator, dan waktu yang merupakan faktor kritis. Dalam hal ini sistem real-time didefinisikan sebagai suatu sistem software dimana sistem dapat berfungsi dengan benar bergantung pada hasil yang diproduksi oleh sistem dan waktu pada hasil tersebut diproduksi. Terlihat bahwa sistem real-time sangat berhubungan dengan respon waktu. Menurut Gray (2010) berdasarkan penelitian yang menggunakan sensor dalam mendeteksi rintangan terlihat bahwa waktu merupakan factor kritis dalam respon traktor. Respon waktu pada penggunaan CCD kamera bergantung pada kecepatan dan kemampuan image processing (pengolahan citra). Komputer yang yang memiliki kemampuan pengolahan yang cepat hal ini tidak menjadi masalah dan respon waktu kamera cukup cepat untuk mendeteksi rintangan pada jarak yang aman.
Thresholding
12
intensitas maksimum (255) pada citra biner dan mengubah piksel-piksel latar belakang pada citra warna menjadi piksel-piksel dengan intensitas minimum (0) pada citra biner, atau sebaliknya (objek dengan intensitas 0 dan latar belakang dengan nilai intensitas 255 pada citra biner yang dihasilkan). Operasi thresholding dapat dilakukan dengan hanya melihat nilai-nilai intensitas sinyal merah, sinyal hijau, atau sinyal biru. Operasi dapat juga dilakukan dengan melihat nilai intensitas rata-rata sinyal merah, sinyal hijau, dan sinyal biru. Thresholding dengan cara yang terakhir ini sama saja dengan melakukan thresholding terhadap citra grayscale, karena citra grayscale dihasilkan dengan merata-ratakan nilai intensitas ketiga sinyal merah, hijau, dan biru (Ahmad 2009).
Pengukuran jarak dua piksel atau dua komponen dari citra diperlukan dalam banyak aplikasi, baik untuk tujuan terakhir maupun untuk tujuan antara. Ada tiga cara yang umum digunakan untuk mengukur jarak dua buah titik pada citra yaitu metode euclidean, city-block, dan chess board seperti yang terlihat pada Gambar 6.
Gambar 6 Contoh dari pengukuran jarak (atas) dan bentuk transformasi citra biner ke jarak (bawah); (a) euclidean, (b) city-block dan (c) chess board (Ahmad 2005)
Ketiga cara perhitungan jarak diatas memberikan hasil trasnformasi yang berbeda terhadap objek berbentuk persegi dengan ukuran 8x8 piksel. Terlihat pada Gambar 6 bahwa pengukuran jarak dengan menggunakan metode euclidean memberikan hasil yang lebih akurat dan mempunyai variasi yang lebih banyak pada hasil pengukurannya. Pengukuran jarak cara euclidean lebih banyak digunakan dari pada dua cara yang lainnya bila yang dibutuhkan adalah informasi jarak dua buah piksel dalam citra.
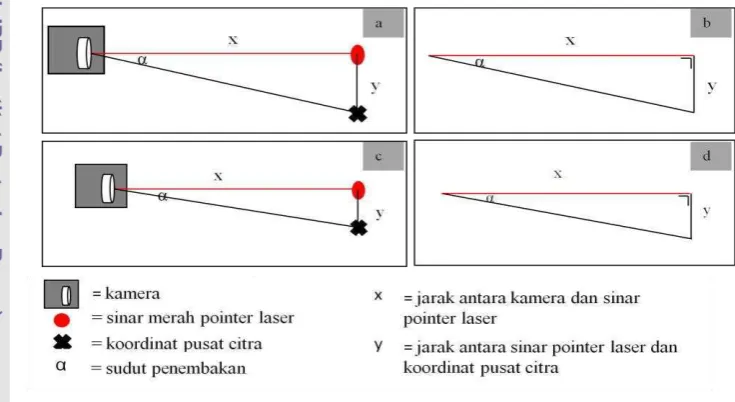
Metode Triangulasi
Trigonometri merupakan suatu metode dalam perhitungan untuk menyelesaikan masalah yang berkaitan dengan perbandingan-perbandingan pada bangun geometri, khususnya dalam bangun yang berbentuk segitiga. Trigonometri berasal dari bahasa Yunani trigono yang berarti segitiga dan metro berarti mengukur. Trigonometri adalah suatu ilmu yang mempelajari hubungan antara sisi dan sudut suatu segitiga (Corral 2009).
13
Gambar 7 Hubungan fungsi trigonometri
Untuk menentukan jarak suatu titik dari dua posisi jarak yang telah diketahui keberadaannya maka digunakan prinsip triangulasi. Sebagai contoh berikut ilustrasi perhitungan jarak menggunakan prinsip triangulasi.
Gambar 8 Ilustrasi perhitungan jarak kamera dan citra dengan menggunakan prinsip triangulasi
Gambar 8a dan 8c merupakan penembakan sinar laser merah pada jarak pengambilan yang berbeda (x yang berbeda). Penembakan pada jarak yang berbeda menyebabkan perubahan jarak antara sinar merah pointer laser terhadap koordinat pusat citra (y yang berbeda) namun membentuk sudut α yang cendrung tetap.
14
Aplikasi Sensor Deteksi dan Pengolahan Citra Real-Time pada Traktor Pertanian
Beberapa penelitian telah melakukan pengembangkan mesin otomatis. Alegri et al. (2011) mengembangkan suatu navigasi traktor pada kondisi outdoor berdasarkan tampilan visual citra secara real-time dan data citra laser. Kendaraan yang digunakan dalam penelitian ini adalah traktor komersial hidraulik (AGRIA S.A). Sensor untuk keamanan, pengenalan lokasi dan lingkungan sekitar diinstal pada traktor dan adaptasi mekanik telah dilakukan untuk memperoleh kopling, rem, dan strir otomatik. 2D laser range finder dan kamera visual diinstall di bagian depan traktor untuk memudahkan melakukan deteksi dan pengenalan objek yang berjarak dekat. Kamera digital ditempatkan dibagian depan yang dilengkapi dengan pelindung yang tembus cahaya untuk melindungi kamera dari debu, kelembaban, dan getaran. Resolusi citra yang digunakan adalah 640 x 480 piksel. Laser yang digunakan merupakan sinar infrared dengan panjang gelombang 905 nm yang menerima pantulan sinar secara langsung dari objek pada koordinar polar. Seperti pada Gambar 9.
Gambar 9 Tampilan (a) Traktor-robot DEDALO (b) gambar detail 2D laser range finder dan visual kamera (Alegri 2011)
Cara operasi laser pada kasus ini berdasarkan prinsip pengukuran time-of light (TOF), single laser pulse dikirim dan dipantulan oleh permukaan objek. Waktu yang dibutuhkan antara pengeluaran dan penerimaan digunakan sebagai perhitungan jarak antara laser dan objek. Laser range finder ditempatkan pada ketinggian 0.67 m diatas permukaan tanah yang diset pada jarak maksimum 8 m dengan resolusi angular 1 °.
15 Contoh hasil metoda penggabungan sensor dapat dilihat pada Gambar 10 di atas. Dua garis hitam pada Gambar 12c menunjukkan objek yang terdeteksi oleh laser pada jarak 3 dan 7 m (Gambar 12b). Dimana laser yang digunakan mempunyai kisaran sudut 53-127° pada penempatan -37° sampai +37° (74°) sudut pandang kamera. Pada tahap selanjutnya dilakukan penentuan citra visual yang berkenaan dengan dua garis hitam pada Gambar 12c melalui segmentasi dan klasifikasi citra. Warna buatan pada Gambar 13b menunjukkan objek pada pemandangan outdoor yang diperoleh melalui pengembangan region growing algorithm.
Gambar 11 (a) citra visual dari penggabungan kamera-laser, (b) segmentasi visual citra oleh region growing algorithm (jarak objek diwakili oleh warna buatan)
Sebuah sistem kendaraan pertanian otomatis telah dikembangkan oleh Torri (2000) di Jepang dengan mengaplikasikan pengolahan citra dan sensor citra. Algoritma pengolahan citra untuk tanaman telah dikembangkan di Tokyo University. Algoritma ini telah dikembangkan untuk pemandu navigasi traktor untuk digunakan pada baris tanaman pertanian, termasuk penyiangan mekanik dan aplikasi pemupukan yang tepat. Untuk pedoman pemandangan yang akurat, analisis citra dari barisan tanaman pada lahan merupakan hal yang sangat diperlukan. Oleh karena itu perbedaan antara tanaman dari tanah atau latar belakang dengan akurasi yang tinggi, deteksi batas baris antara tanaman dengan areal tanah dan identifikasi posisi menggunakan pemandangan tiga dimensi sangat dibutuhkan. Untuk membedakan antara tanaman tersebut, maka digunakan transformasi warna HSI (hue, saturation, and intensity). Gambar 12 berikut memperlihatkan hasil deteksi lahan pertanian dalam navigasi otomatis kendaraan yang berbasis pengolahan citra dan sensor citra.
16
Subramanian (2006) mengembangkan machine vision dan sensor laser untuk melakukan navigasi otomatis traktor yang bekerja pada tanaman jeruk. Gambar 13 memperlihatkan kendaraan yang dilengkapi dengan sensor kamera CCD dan sensor laser. Citra hasil olahannya dapat dilihat pada Gambar 14. Dari hasil ini diperoleh error rata-rata 2.8 cm jika menggunakan machine vision dan sebesar 2.5 cm jika menggunakan sensor laser (ladar).
Gambar 13 Kamera CCD dan laser sensor diatas cabin traktor untuk memandu navigasi kendaraan otomatis (Subramanian 2006)
Gambar 14 Hasil Machine vision pada barisan tanaman jeruk: (a) gambar asli, (b) segmentasi kanopi, dan (c) batas jalur (Subramanian 2006)
17
Gambar 15 Tampilan citra (a) kondisi jalan sebenarnya dan (b) ekstraksi dan prediksi batas titik objek (Chen dan Tsai 1999)
Penelitian mengenai smart traktor telah dilakukan dibeberapa negara. Rahman (2013) mengembangkan traktor pintar yang dapat bekerja secara otomatis dalam mendukung kegiatan budidaya pertanian presisi yang meliputi pengembangan sistem mekatronika strir, kopling, akselerator, rem dan implemen serta pengaplikasian perangkat RTK-DGPS pada sistem navigasi traktor. Set-up pengujian dapat dilihat pada Gambar 16.
Gambar 16 Set-up pengujian lahan (Rahman 2013)
Pengujian dilakukan pada 3 jenis lintasan, yaitu: lintasan garis lurus, lintasan kotak serta pengolahan tanah menggunakan rotary harrower. Hasil pengujian menunjukkan bahwa sistem kemudi otomatis yang telah dibangun mampu mengarahkan traktor mengikuti lintasan yang diinginkan dengan error rata-rata pada lintasan lurus sebesar 12 cm, pada lintasan kotak sebesar 11.6 cm dan pada pengolahan tanah sebesar 17.9 cm. Bentuk hasil pengujian dengan lintasan lurus, kotak, dan pengolahan tanah pada pengulangan 3 dapat dilihat pada Gambar 17.
Baseline GPS Antena
GPS Antena radio
rover - baseline
Lahan pengujian
18
Gambar 17 Pegujian sistem navigasi: (a) lintasan lurus tanpa simpangan, (b)lintasan lurus dengan penggunaan simpangan awal, (c) lintasan persegi panjang, (d) pengolahan tanah menggunakan rotary harrower (Rahman 2013)
3
METODE
Waktu dan Tempat Penelitian
Penelitian dilaksanakan pada bulan Mei 2012 sampai Maret 2013 pada dua tempat yang berbeda. Untuk disain, perakitan, dan pembuatan dilakukan di Laboratorium Mekatronika dan Robotika dari bagian Teknik Mesin Otomasi sedangkan pengujian lapangan dilakukan di Laboratorium Lapang Siswadi Supardjo, Departemen Teknik Mesin dan Biosistem, Fakultas Teknologi Pertanian, Institut Pertanian Bogor.
Bahan dan Alat
Alat yang digunakan pada penelitian ini meliputi:
Perangkat keras
Perangkat keras (hardware) yang digunakan dalam penelitian ini dapat dilihat pada Tabel 2.
Perangkat lunak
19 Tabel 2 Perangkat keras yang digunakan
Spesifikasi Fungsi Spesifikasi Fungsi
Kabel Firewire, panjang 3 meter
20
Gambar 18 Bagan alir proses penelitian
Penelitian Pendahuluan
21
Perancangan Sistem Deteksi Rintangan
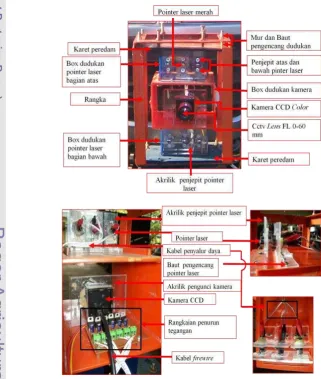
Kamera dan pointer laser digabungkan pada satu dudukan. Posisi laser yang stabil pada dudukan sangat mempengaruhi arah pancaran sinar pointer laser. Gambar 19 menunjukkan ilustrasi rangkaian posisi kamera perekam dan pointer laser pada dudukan.
Gambar 19 Dudukan kamera perekam dan pointer laser beserta bagian-bagiannya
Pengaturan sudut dan posisi pointer laser pada dudukan dilakukan dengan metode trial and error untuk mendapatkan pancaran sinar laser merah yang sejajar yang mampu mewakili pemandangan di depannya. Gambar 20 menunjukkan beberapa komponen pengaturan yang dilakukan pada dudukan.
Gambar 20 Pengaturan penempatan pointer laser pada dudukan: (a) tampak samping dan (b) dan tampak atas
Pembuatan Sistem Deteksi Rintangan
22
telah dirancang pada tahap sebelumnya seperti dudukan pointer laser, dudukan kamera, dan rangka penopang sistem keseluruhan. Sumber daya untuk semua komponen berasal dari aki yang terdapat pada traktor dengan besar tegangan tegangan 12 volt. Sedangkan komponen-komponen lainnya pada sistem deteksi rintangan memiliki tegangan kecil dari 12 volt sehingga sumber tegangan yang ada perlu diturunkan dengan menggunakan rangkaian sederhana penurun tegangan.
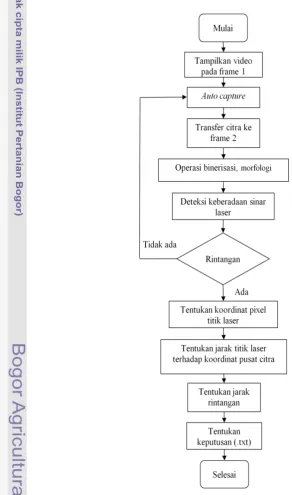
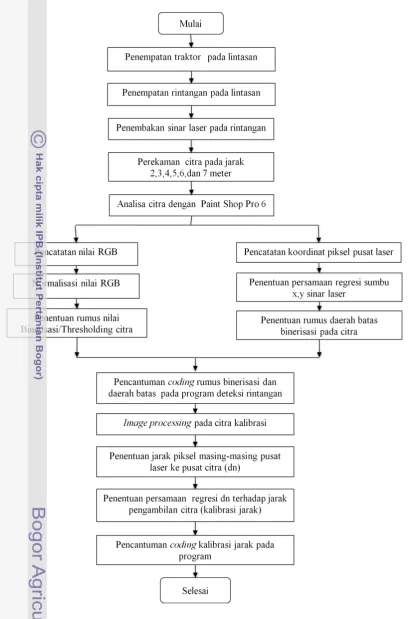
Pembuatan program pengolahan citra untuk deteksi rintangan real-time dilakukan dengan spesifikasi kemampuan program dalam mengenali objek, yang dalam hal ini berupa rintangan pada lintasan kerja traktor. Program pengolahan citra berupa binerisasi, operasi morfologi seperti erosi, dilasi dikembangkan pada program ini. Program diharapkan mampu mendeteksi kemungkinan adanya rintangan, membedakan objek rintangan dengan warna latar belakang citra dan mampu memberikan satu nilai jarak antara rintangan dengan traktor, sehingga traktor mampu mengambil keputusan. Keputusan dapat berupa perintah untuk belok kiri lintasan, kanan, berhenti, atau terus berjalan pada lintasan yang sama apabila tidak terdapat rintangan. Pengembangan program dilakukan dengan menggunakan SharpDevelop versi 3.2 dengan bahasa pemrograman C#. Pada tahapan ini program akan bisa digunakan untuk mendeteksi rintangan setelah beberapa coding perintah telah ditambahkan pada proses pengambilan citra rintangan papan (triplek). Algoritma program pengolahan citra rintangan real-time ditunjukkan pada Gambar 21.
Pengambilan Citra dan Kalibrasi Optis Kamera
Pengambilan citra pada tahap ini bertujuan untuk mendapatkan nilai RGB sinar laser, koordinat laser, dan jarak piksel pusat laser terhadap koordinat pusat citra rintangan papan (triplek) serta mendapatkan nilai RGB citra rintangan batang pohon, dll. Nilai RGB selanjutnya dibinerisasi dengan menggunakan rumus berikut:
(1)
(2)
(3) Di mana:
r, g, b = komponen warna merah, hijau, dan biru setelah dinormalisasi R, G, B = komponen warna dasar merah, hijau, dan biru
Nilai binerisasi (rgb) akan dicantumkan pada program pengolahan citra deteksi rintangan sebagai coding untuk membedakan antara objek dan latar belakang citra. Koordinat laser pada citra digunakan untuk mendapatkan persamaan dalam membuat batasan daerah binerisasi pada citra. Sedangkan jarak piksel pusat laser terhadap koordinat pusat citra diperoleh dengan menggunakan rumus Euclidean pada persamaan berikut.
23
Dimana:
i = koordinat sumbu x piksel citra j = koordinat sumbu y piksel citra 1 = titik piksel 1
2 = titik piksel 2
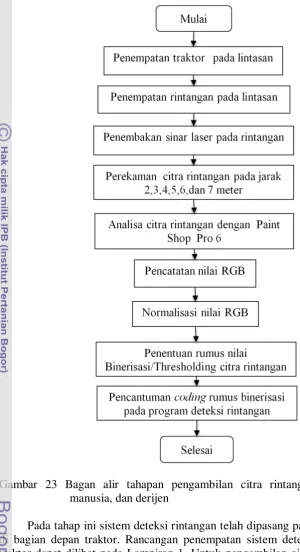
Nilai binerisasi citra rintangan batang pohon, dll digunakan sebagai coding program pengolahan citra untuk binerisasi rintangan pada uji kinerja statis dan real-time. Bagan alir tahapan pengambilan citra ditunjukkan pada Gambar 22 dan 23.
24
25
Gambar 23 Bagan alir tahapan pengambilan citra rintangan batang pohon, manusia, dan derijen
26
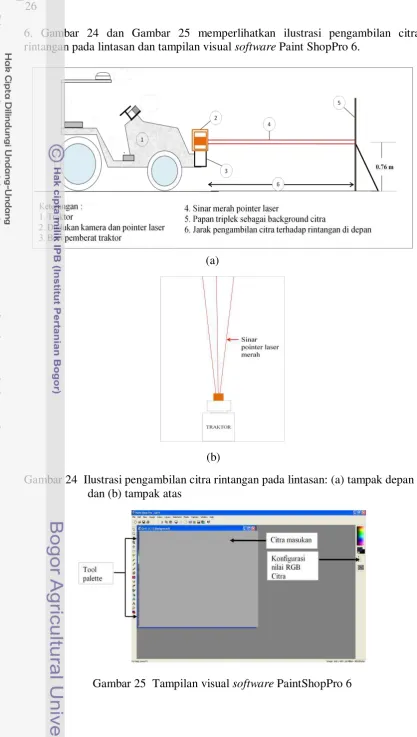
6. Gambar 24 dan Gambar 25 memperlihatkan ilustrasi pengambilan citra rintangan pada lintasan dan tampilan visual software Paint ShopPro 6.
Gambar 24 Ilustrasi pengambilan citra rintangan pada lintasan: (a) tampak depan dan (b) tampak atas
Gambar 25 Tampilan visual software PaintShopPro 6 (a)
27
Uji Fungsional
Uji fungsional meliputi uji validasi dan uji konsistensi sinar laser yang terdapat pada citra. Uji fungsional ini dilakukan untuk mengetahui fungsi setiap komponen dari sistem yang telah dikembangkan. Komponen yang memiliki fungsi yang kurang optimal selanjutnya diperbaiki sebelum dilakukan uji kinerja. Untuk proses validasi objek rintangan berupa batang pohon, manusia atau rintangan lainnya direkam pada jarak pengambilan tertentu. Program akan mengolah citra rintangan tersebut dan memberikan hasil pendugaan jarak. Error sistem merupakan selisih pendugaan jarak rintangan oleh program dengan jarak rintangan hasil pengukuran.
Pengujian konsistensi dilakukan untuk mengetahui konsistensi sinar laser yang dihasilkan selama sistem bekerja. Pengujian ini dilakukan dengan menembakkan sinar laser merah pada latar belakang papan (triplek) dan citra direkam pada jarak pengambilan 2, 3, 4, 5, 6, dan 7 m masing-masing dilakukan 10 kali.
Uji Kinerja
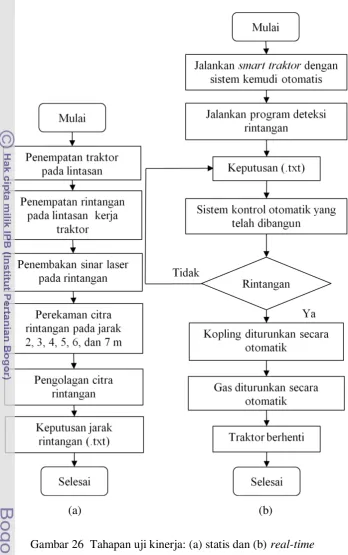
Uji kinerja ini meliputi uji kinerja statis dan uji kinerja real-time. Pada pengujian statis traktor berada dalam kondisi diam dan sampel rintangan yang digunakan berupa manusia, batang pohon, dan jerigen. Tahapan yang dilakukan pada proses uji kinerja statis dapat dilihat pada Gambar 26.
28
Gambar 26 Tahapan uji kinerja: (a) statis dan (b) real-time
29
4
HASIL DAN PEMBAHASAN
Penelitian Pendahuluan
Pada penelitian pendahuluan ini dilakukan beberapa percobaan yang terkait dengan sensor yang akan digunakan. Untuk pemilihan sensor sinar laser yang tepat, maka dilakukan percobaan pengambilan citra outdoor dengan menggunakan dua jenis pointer laser, yaitu: pointer laser dengan sinar warna merah dan hijau. Pointer laser ini merupakan jenis pointer laser yang mudah ditemukan di pasaran. Gambar 27 menunjukkan pointer laser merah dan hijau pada citra yang ditangkap kamera.
Gambar 27 Pointer laser (a) sinar merah dan (b) hijau dalam citra yang ditangkap kamera
Komponen warna RGB sinar laser merah, hijau, dan latar belakang pada Gambar 27 diperoleh dengan menggunakan PaintShop Pro versi 6. Komponen nilai RGB ini selanjutnya dinormalisasi dengan menggunakan rumus pada persamaan 1, 2, dan 3. Selang nilai hasil normalisasi RGB citra ditunjukkan pada Gambar 28.
30
(a)
Gambar 28 Perbedaan nilai normalisasi komponen warna: (a) merah, (b) hijau, dan (c) biru pada beberapa komponen pengujian citra outdoor
(b)
31 Jenis kamera perekam yang digunakan sangat berpengaruh terhadap kualitas citra yang dihasilkan. Kamera yang digunakan merupakan kamera yang memungkinkan untuk digunakan di lahan terbuka (outdoor) yang sesuai dengan kondisi pencahayaan di lahan tesebut. Kamera yang dibutuhkan diharapkan mampu fokus dalam membaca sinar merah pointer laser di sepanjang lintasan kerja traktor. Focal length (FL) merupakan parameter pertama yang dilakukan pengujian untuk mendapatkan kamera dengan spesifikasi perekam yang tepat. Pengujian dengan FL yang berbeda memperlihatkan perbedaan lebar sudut pandang lintasan pada jarak pengambilan (pemotretan) yang sama. Kamera perekam yang dibutuhkan diharapkan mampu menangkap citra selebar lintasan kerja traktor pada jarak maksimal 7 m. Untuk melakukan pengujian nilai FL ini digunakan kamera canon 60t yang memiliki nilai FL 0-200 mm.
Parameter kedua yang diuji adalah kemampuan kamera untuk dapat digunakan di lahan terbuka (outdoor). Pada pengujian ini dilakukan pengambilan citra outdoor dengan beberapa jenis kamera perekam yang telah tersedia di laboratorium yang menangani penelitian ini. Berikut hasil pengujian dengan parameter FL dan kondisi pencahayaan kamera.
Gambar 29 Perbedaan lebar sudut pandang lintasan dengan focal length yang berbeda pada jarak pemotretan 7 meter
Gambar 30 Perbedaan hasil pemotretan dengan jenis kamera yang berbeda pada kondisi outdoor
32
Perancangan Sistem Deteksi Rintangan Traktor
Tahapan ini bertujuan untuk merancang sistem deteksi rintangan real-time secara keseluruhan. Pada tahap ini dilakukan proses perhitungan teknik, rancangan struktural, dan fungsional sistem deteksi rintangan.
Kamera CCD dan Lensa CCTV
Kamera CCD color berfungsi sebagai mata untuk mengenali lingkungan sekitar secara visual untuk memastikan bahwa rute yang akan dilalui bebas dari rintangan yang dapat mengganggu kerja traktor. Kamera CCD ini mempunyai interfacing firewire yang dihubungkan dengan laptop pengendali melalui expresscard. Kamera ini mempunyai resolusi 640 x 480 piksel dengan dimensi kamera 5x5x5 cm. Kamera ini akan mengirimkan citra secara simultan dan mengirimkan ke sistem pengolahan citra untuk mengetahui kondisi lintasan citra. Kamera ini dilengkapi dengan sebuah lensa berupa cctv lens dengan dimensi panjang 6 cm dan memiliki spesifikasi FL 0 – 60 mm. Lensa ini memiliki pengaturan fokus, diafragma, dan FL secara menual. Secara keseluruhan lensa ini berfungsi untuk memperjelas tampilan visual citra lintasan.
Pointer Laser
Pointer laser merah berfungsi sebagai sensor deteksi rintangan. Pointer laser ini berbentuk silinder dengan dimensi panjang 7 cm dan diameter 1 cm. Pada sistem ini digunakan enam pointer laser dengan susunan tiga berada di atas kamera dan tiga lainnya berada di bagian bawah kamera. Susunan ini dibentuk berdasarkan cara pembacaan rintangan pada lintasan yang mewakili view lintasan kerja traktor. Masing-masing pointer laser memancarkan sinarnya secara terus menerus selama sistem dijalankan pada lintasan kerjanya.
Akrilik
33
Rangka dan Karet Peredam
Rangka dudukan berfungsi sebagai penopang dan tempat dudukan sistem deteksi rintangan secara keseluruhan. Rangka ini mempunyai dimensi 34.5 x 26 x 25 cm yang terbuat dari besi siku dengan ketebalan 3 mm. Rangka ini dilindungi oleh lembaran karet peredam yang berada pada bagian atas dan bawah rangka. Karet ini berfungsi untuk meredam getaran yang diterima sistem deteksi rintangan yang bersumber dari mesin traktor selama traktor dijalankan. Apabila getaran ini dibiarkan, maka akan merusak komponen-komponen deteksi rintangan seperti pointer laser, kamera, dan lensa. Bentuk rancangan dudukan dan dimensi sistem deteksi rintangan beserta komponen-komponennya dapat dilihat pada Lampiran 5 dan 6.
Pembuatan sistem deteksi rintangan traktor
Tahapan ini bertujuan untuk membuat sistem deteksi rintangan berdasarkan rancangan yang telah dibuat. Pertama dilakukan pembuatan sistem mekanik deteksi rintangan. Pembuatan sistem mekanik deteksi rintangan dilakukan berdasarkan rancangan yang telah dibuat. Tampilan sistem deteksi rintangan beserta komponen penyusunnya ditunjukkan pada Gambar 31.
34
Sistem deteksi rintangan ditempatkan dibagian depan smart tractor Yanmar EF 453T. Traktor ini merupakan traktor yang mempunyai kontrol kemudi otomatis yang telah dikembangkan. Pada traktor juga dibuat tempat dudukan untuk laptop pengendali dan kipas untuk pendingin. Penempatan sistem deteksi rintangan pada traktor ditunjukkan pada Gambar 32.
Gambar 32 Penempatan sistem deteksi rintangan pada smart tractor
Pengembangan program pengolahan citra real-time dilakukan dengan menggunakan SharpDevelop versi 3.2 dengan bahasa pemrograman C#. SharpDevelop merupakan sebuah compiler dan IDE (integrated development environment) open source, salah satunya untuk visual C#. Sedangkan bahasa C# merupakan bahasa pemrograman yang berorientasi objek yang dikembangkan oleh Microsoft. Tampilan visual pemrograman menggunakan SharpDevelop versi 3.2 ditunjukkan pada Gambar 33.
Gambar 33 Pengembangan program pengolahan citra menggunakan SharpDevelop versi 3.2 menggunakan bahasa C#
35 dapat dilihat pada tombol-tombol perintah pada tampilan visual program pengolahan citra secara real-time pada Gambar 34.
Gambar 34 Tampilan visual pengembangan program pengolahan citra real-time untuk deteksi rintangan traktor
Pada tampilan visual diatas dapat dilihat beberapa perintah yang dijalankan oleh program. Sebelum meng-klik tombol “start”, maka ditulis terlebih dahulu “interval” waktu (dalam satuan mili second) yang merupakan kecepatan proses pengolahan citra yang diinginkan. Kecepatan ini terhitung mulai dari proses inisialisasi kamera, capture citra, proses pengolahan citra, serta menampilkan hasil deteksi rintangan dan pendugaan jarak. Setelah melakukan start program, maka secara otomatis program melakukan capture citra sesuai dengan interval waktu yang diberikan. Selanjutnya program melakukan proses “thresholding dan dilasi” (proses pada pengolahan citra) terhadap citra yang di capture. Proses-proses pengolahan citra ini bertujuan untuk mendapatkan citra biner yang sempurna yang mampu memberikan informasi mengenai rintangan pada lintasan dengan tepat.
36
Dengan menjalankan program pengolahan citra untuk deteksi rintangan ini, maka program diperintahkan untuk membaca citra berdasarkan rumus-rumus dan perintah yang dicantumkan sebagai coding program. Rumus-rumus dan coding perintah tersebut diperoleh pada tahap selanjutnya yaitu pengambilan citra dan kalibrasi optis kamera.
Pengambilan Citra dan Kalibrasi Optis Kamera
Pengambilan citra pada tahap ini bertujuan untuk mendapatkan nilai RGB, koordinat laser, dan jarak piksel pusat laser terhadap koordinat pusat citra rintangan papan (triplek) serta mendapatkan nilai RGB citra rintangan pohon, dll. Pengambilan citra dilakukan pada dua kondisi pencahayaan, pertama pada intensitas matahari rendah (pukul 06.30-07.00 WIB) dengan selang intensitas 500-1200 lux dan kedua pada intensitas matahari tinggi (pukul 07.00-08.00 WIB) dengan selang intensitas 1000-2000 lux. Citra yang direkam dengan intensitas rendah digunakan untuk kalibrasi dan citra pada intensitas tinggi digunakan untuk mendapatkan nilai RGB sinar laser merah pada rintangan papan (triplek). Penempatan sistem deteksi rintangan pada smart tractor ditunjukkan pada Gambar 35.
Gambar 35 Penempatan sistem deteksi rintangan pada smart tractor
37
Gambar 36 Bentuk lintasan kerja traktor pada proses pengambilan citra rintangan (a) tampak samping dan (b) tampak depan
Gambar 37 Urutan proses pengambilan citra rintangan papan (triplek) dengan jarak pengambilan (a) 2 m, (b) 3 m, (c) 4 m, (d) 5 m, (e) 6 m, dan (f) 7 m
38
Keterangan: sinar laser merah pada papan triplek diperbesar
Gambar 38 Hasil pengambilan citra rintangan papan (triplek) pada jarak
pengambilan (a) 2 m, (b) 3 m, (c) 4 m, (d) 5 m, (e) 6 m, dan (f) 7 m
Gambar 39 Penomoran titik-titik laser pada citra
Citra rintangan papan (triplek) yang telah direkam pada intensitas tinggi (1000-2000 lux) a diolah dengan menggunakan software Paint Shop Pro versi 6 untuk mengetahui nilai RGB sinar laser merah dan koordinat pusat piksel laser pada citra. Tampilan visual pengolahan citra dengan menggunakan software Paint Shop Pro versi 6 ditunjukkan pada Gambar 40.