STUDI PELEPASAN SEBAGIAN BEBAN PADA GENERATOR
YANG BEKERJA SECARA PARALEL PADA PT. MANUNGGAL
WIRATAMA (SUN PLAZA)
OLEH :
NAMA : LAMGANDA J GIRSANG
NIM : 030402017
DEPARTEMEN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA
MEDAN
ABSTRAK
Stabilitas dari sebuah jaringan tenaga listrik selalu menjadi salah satu masalah yang mendasar dan terpusat dalam perancangan dan pengoperasian suatu pembangkit listrik. Melayani pengguna dari listrik adalah tugas dari jaringan tenaga seperti membangkitkan, mentransmisikan dan mendistribusikan energi listrik kepada pengguna. Oleh karena itu, pertumbuhan dan perkembangan jaringan sangat bergantung kepada rancangannya sendiri dan sistem tesebut harus dapat memenuhi kebutuhan pengguna. Kebutuhan yang paling penting disini adalah reliabilitas, kualitas dari energi dan kapasitas pelayanan beban secara kontinu. Para perancang jaringan dan manager operasional harus selalu memperhatikan kebutuhan ini dan harus dapat mengambil langkah yang diperlukan untuk memenuhi kebutuhan ini serta dapat memelihara kualitas kebutuhan yang diinginkan.
Realibilitas dan stabilitas dari sistem dapat juga dipelajari dari sudut pandang kerugian sosial dan ekonomis yang dapat mengakibatkan kepadaman total atau situasi ketidakmampuan dalam pelayanan beban. Dalam konteks ini, frekuensi sistem dan kontrol dari frekuensi dapat menjadi landasan sebagai indikator stabilitas dan kepuasan pelayanan.
Jika jumlah dari total beban dan rugi-ruginya dalam sistem melebihi jumlah daya yang disediakan oleh generator, rotor akan melambat sehingga frekeunsi akan turun. Sebaliknya, jika daya yang dibangkitkan melebihi dari permintaan beban maka rotor akan mengalami percepatan dan frekuensi akan naik.
Dalam sistem yang berbeda, generator memiliki unit governor yang akan merasakan perubahan kecil dalam beban yang terhubung dan akan membangkitkan daya menyamai daya yang dibutuhkan untuk menjaga stabiilitas frekuensi.
Dalam perubahan yang besar dan mendadak, seperti ketika sistem kehilangan salah satu generatornya ketika bekerja paralel, maka frekuensi akan turun dengan cepat. Jika governor tidak dapat merespon perubahan ini secara cepat, sistem akan tidak terjaga kestabilannya. Dalam situasi ini diperlukan pemilihan dan pelepasan beban secara cepat dan tepat yang dapat membantu pengembalian kestabilan sistem sehingga mencegah pemadaman total sistem. Hal inilah yang biasa disebut dengan pelepasan beban (Load
KATA PENGANTAR
Puji dan syukur penulis ucapkan kepada Tuhan Yang Maha Esa, atas rahmat dan karunia-Nya sehingga penulis dapat menyelesaikan Tugas Akhir ini yang berjudul “Pelepasan Sebagian Beban Pada Generator Yang Bekerja Paralel Pada PT. Manunggal Wiratama (Sun Plaza)”.
Adapaun penulisan tugas akhir ini merupakan salah satu syarat kelulusan yang harus diselesaikan penulis sebagai mahasiswa Pendidikan Strata 1 Jurusan Teknik Elektro Fakultas Teknik Universitas Sumatera Utara.
Dalam penyelesaian Tugas Akhir ini penulis banyak menemukan banyak sekali bantuan dan dukungan dari berbagai pihak. Dalam kesempatan ini penulis mengucapkan terima kasih yang sebesar-besarnya kepada:
1. Bapak Ir. Nasrul Abdi, MT dan Bapak Rahmad Fauzi, ST, MT selaku Ketua dan Sekretaris Departemen Teknik Elektro USU.
2. Bapak Ir. Sumantri Zulkarnaen selaku Dosen Pembimbing Tugas Akhir, atas segala bimbingan, pengarahan, motivasi dan dukungannya.
3. Bapak Ir. Thalib Pasaribu selaku dosen wali penulis, atas bimbingan dan arahannya selama penulis menyelesaikan perkuliahan.
4. Seluruh bapak dan ibu dosen jurusan Teknik Elektro USU, khusunya bapak dan ibu dosen pada Sub Jurusan Teknik Energi Listrik.
5. Bapak dan ibu staf pegawai Departemen Teknik Elektro khususnya kepada Martin L. Tarigan, AMd.
staf Supervisor yang telah membantu kelancaran proses pengerjaan tugas akhir ini.
7. Kedua orang tua penulis, Ir. K. Girsang dan Ibu. E. br. Simanjuntak serta kedua saudara penulis Rony T. C. P. Girsang dan Bistok D. P. Girsang
8. Rekan-rekan Jurusan Teknik Elektro Stambuk 2003 khususnya Hedbien, Juanda, Wiswa, Enopati, Olo, Weldy, Ferry, Julpina, Brian, Benget, Dewi, Bobby, Rony, Hans, Nora, Nanda dan juga kepada teman-teman penulis, Brata, Alex, Aditya, David, beserta rekan-rekan lain yang tidak dapat disebutkan seluruhnya.
9. Keluarga besar Terompet, Ir. P. Simanjuntak, M. R. Simatupang, Mkes, Anthony Simanjuntak, Donni Simanjuntak, SE, Ferry Simanjuntak, Rudi Panjaitan, SH dan Ricardo Simanjuntak atas dukungannya selama pengerjaan tugas akhir ini sampai selesai.
Akhir kata, penulis menyadari banyak terdapat kekurangan dalam Tugas Akhir ini dan mengharapkan saran dan kritik yang bersifat membangun untuk kesempurnaan dari tugas akhir ini. Semoga Tugas Akhir ini dapat bermanfaat bagi siapa saja yang membacanya.
Medan, 1 April 2009 Penulis,
DAFTAR ISI
ABSTRAK ...i
KATA PENGANTAR ...iii
DAFTAR ISI ...v
DAFTAR TABEL ...viii
DAFTAR GAMBAR ...ix
I. PENDAHULUAN 1. 1. Latar Belakang ...1
1. 2. Batasan Masalah ...2
1. 3. Tujuan Penulisan ...3
1. 4. Metode Penulisan ...3
1. 5. Sistematika Penulisan ...3
II. GENERATOR II. 1. Umum ...5
II. 2. Prinsip Kerja Generator ...6
II. 3. Konstruksi Generator ...7
II.3.1. Bagian Yang Diam (Stator) ...8
II.3.2. Bagian Yang Bergerak (Rotor) ...9
II. 4. Pengaturan Putaran ...10
II. 5. Pengaturan Tegangan ...11
II. 6. GPC (Generator Paralelling Controller) ...15
II. 6.2. Fungsi Proteksi Generator ...17
II. 7. PLC...19
II. 8. Operasi Paralel Generator ...21
III. PELEPASAN BEBAN PADA GENERATOR YANG BEKERJA PARALEL .... III. 1. Daya Output Generator ...29
III. 2. Pengaruh Perubahan Eksitasi ...34
III.3. Gangguan Pada Generator Yang Bekerja Paralel ...35
III.4. Pelepasan Beban Pada Generator Yang Bekerja Secara Paralel ...38
IV. PENENTUAN PELEPASAN BEBAN TIBA-TIBA PADA GENERATOR YANG BEKERJA SECARA PARALEL PADA PT. MANUNGGAL WIRATAMA (SUN PLAZA) IV. 1. Data Beban Generator ...44
IV. 2. Perhitungan Penurunan Frekuensi Karena Gangguan Pada Generator ...45
IV.2.1. Analisa Konstanta Momen Inersia Dengan Penurunan Frekuensi ...51
IV.2.2. Analisa Penurunan Frekuensi Dengan Konstanta Momen Inersia Konstan ...89
IV.2.2. Analisa Pelepasan Beban Dengan Konstanta Momen Inersia Konstan Dengan Bantuan GPC dan PLC secara Otomatis Saat Salah Satu Generator Mengalami Gangguan ...107
V. KESIMPULAN DAN SARAN V.1. Kesimpulan ...132
DAFTAR TABEL
Tabel 4.1. Data Perhitungan Penurunan Frekuensi Dengan Nilai Konstanta
Inersia (H) Berubah-ubah ...88 Tabel 4.2. Data Perhitungan Penurunan Frekuensi Dengan Nilai Konstanta
Inersia (H) Konstan ...107 Tabel 4.3. Data Perhitungan Pelepasan Beban Dengan Nilai Konstanta
DAFTAR GAMBAR
Gambar 2.1. Sistem Pembangkitan Generator Sinkron ...6
Gambar 2.2. Kumparan 3 Fasa ...7
Gambar 2.3. Konstruksi Generator Sinkron ...8
Gambar 2.4. Konstruksi Rotor Kutub Silindris ...10
Gambar 2.5. Konstruksi Generator Kutub Menonjol ... 10
Gambar 2.6. Self Excited AVR Controller Generator ...13
Gambar 2.7. Permanent Magnet Generator (PMG) Exciter ...15
Gambar 2.8. Generator Paralelling Controller (GPC) ...16
Gambar 2.9. Blok Pengontrol PLC ...19
Gambar 2.10. Diagram Blok PLC...20
Gambar 2.11. Operasi Paralel Lima Generator ...20
Gambar 2.12. Paralel Dua Generator Reaktansi Diabaikan ...22
Gambar 2.13. Paralel Dua Generator Resistansi Diabaikan ...23
Gambar 2.14. Arus Sinkronisasi Penuh ...23
Gambar 2.15. Arus Sinkronisasi Tidak Penuh ...24
Gambar 2.16. Paralel Lima Generator Melayani Beban ...25
Gambar 2.17. Pembagian Beban Antar Lima Generator Paralel...26
Gambar 2.18. Pembagian Beban Antar Dua Generator ...28
Gambar 4.1. Perubahan Frekuensi Secara Step By Step ...51
ABSTRAK
Stabilitas dari sebuah jaringan tenaga listrik selalu menjadi salah satu masalah yang mendasar dan terpusat dalam perancangan dan pengoperasian suatu pembangkit listrik. Melayani pengguna dari listrik adalah tugas dari jaringan tenaga seperti membangkitkan, mentransmisikan dan mendistribusikan energi listrik kepada pengguna. Oleh karena itu, pertumbuhan dan perkembangan jaringan sangat bergantung kepada rancangannya sendiri dan sistem tesebut harus dapat memenuhi kebutuhan pengguna. Kebutuhan yang paling penting disini adalah reliabilitas, kualitas dari energi dan kapasitas pelayanan beban secara kontinu. Para perancang jaringan dan manager operasional harus selalu memperhatikan kebutuhan ini dan harus dapat mengambil langkah yang diperlukan untuk memenuhi kebutuhan ini serta dapat memelihara kualitas kebutuhan yang diinginkan.
Realibilitas dan stabilitas dari sistem dapat juga dipelajari dari sudut pandang kerugian sosial dan ekonomis yang dapat mengakibatkan kepadaman total atau situasi ketidakmampuan dalam pelayanan beban. Dalam konteks ini, frekuensi sistem dan kontrol dari frekuensi dapat menjadi landasan sebagai indikator stabilitas dan kepuasan pelayanan.
Jika jumlah dari total beban dan rugi-ruginya dalam sistem melebihi jumlah daya yang disediakan oleh generator, rotor akan melambat sehingga frekeunsi akan turun. Sebaliknya, jika daya yang dibangkitkan melebihi dari permintaan beban maka rotor akan mengalami percepatan dan frekuensi akan naik.
Dalam sistem yang berbeda, generator memiliki unit governor yang akan merasakan perubahan kecil dalam beban yang terhubung dan akan membangkitkan daya menyamai daya yang dibutuhkan untuk menjaga stabiilitas frekuensi.
Dalam perubahan yang besar dan mendadak, seperti ketika sistem kehilangan salah satu generatornya ketika bekerja paralel, maka frekuensi akan turun dengan cepat. Jika governor tidak dapat merespon perubahan ini secara cepat, sistem akan tidak terjaga kestabilannya. Dalam situasi ini diperlukan pemilihan dan pelepasan beban secara cepat dan tepat yang dapat membantu pengembalian kestabilan sistem sehingga mencegah pemadaman total sistem. Hal inilah yang biasa disebut dengan pelepasan beban (Load
BAB I
PENDAHULUAN
I.1. Latar Belakang Masalah
Listrik seperti yang kita ketahui adalah suatu bentuk energi sekunder yang paling praktis penggunaanya oleh manusia. Listrik dihasilkan dari proses konversi sumber energi primer seperti batu bara, minyak bumi, gas, panas bumi, potensial air dan energi angin. Sistem pembangkitan listrik yang sudah umum digunakan adalah mesin generator, dimana penggerak utamanya dapat berupa mesin turbin, mesin diesel atau mesin baling-baling.
Generator adalah salah satu alternatif sumber listrik yang banyak digunakan dan sangat penting pada saat ini. Umumnya generator digunakan oleh industri-industri sebagai komponen utama sebuah pembangkit listrik. Untuk itu sangat diperlukan adanya suatu sistem pembangkit yang dapat menjaga keseimbangan antara kapasitas penyediaan daya listrik dengan kebutuhan beban yang diperlukan terlebih sekarang ini pemakaian generator sebagai pembangkit sudah merupakan hal yang umum dalam sistem kelistrikan perusahaan-perusahaan yang memiliki kebutuhan beban yang relatif besar.
Ketika generator dari pembangkit listrik membangkitkan daya yang lebih besar dari beban yang dilayaninya, maka frekuensi sistem akan naik. Sebaliknya, ketika generator dari pembangkit listrik membangkitkan daya yang lebih kecil dari beban yang dilayaninya, maka frekuensi sistem akan turun. Pada saat frekuensi sistem mengalami penurunan, diperlukan suatu upaya untuk mengembalikan frekuensi sistem kembali ke kondisi normal yang telah ditentukan. Salah satu upaya untuk menaikkan frekuensi sistem ini ke nilai yang diinginkan adalah dilakukan pelepasan sebagian beban pada generator (Load Shedding).
Pelepasan beban oleh rele frekuensi adalah metode yang paling umum digunakan untuk mengontrol frekuensi dari jaringan tenaga dengan aturan batasan dan juga untuk memelihara stabilitas dalam kondisi-kondisi kritis. Dalam metode yang sekarang dipakai, ketika frekuensi turun dibawah dari frekunsi operasional yang ditentukan, rele frekuensi dari sistem akan memutuskan secara bertahap bagian-bagian dari beban sehingga selanjutnya dapat mencegah frekuensi turun lebih jauh lagi.
I.2. Batasan Masalah
Dalam tugas akhir yang aplikasinya pada PT. Manunggal Wiratama (Sun Plaza) Medan ini, penulis membuat batasan-batasan masalah sebagai berikut :
1. Tidak membahas secara mendalam ganguan-gangguan yang terjadi pada generator.
2. Tidak membahas secara mendalam pelepasan beban sebagai akibat turunnya tegangan.
I.3. Tujuan Penulisan
Adapun yang menjadi tujuan penulisan tugas akhir ini adalah : 1. Mengetahui prinsip memparalelkan generator secara otomatis.
2. Mengetahui prosedur pelepasan beban pada generator yang bekerja paralel. 3. Menentukan besar beban yang harus dilepas untuk menjaga stabilitas sistem
antara daya yang dibangkitkan generator yang bekerja paralel dengan beban yang dilayaninya.
I.4. Metode Penulisan
1. Studi literatur, berupa studi kepustakaan dan kajian buku-buku teks pendukung. 2. Studi lapangan, yaitu mengambil data-data yang diperlukan untuk penulisan
Tugas Akhir ini.
3. Studi Bimbingan, diskusi-diskusi dan tanya jawab dengan dosen pembimbing yang telah ditunjuk oleh pihak Departemen Teknik Elektro USU mengenai kendala-kendala yang timbul selama penyusunan Tugas Akhir ini.
I.5. Sistematika Penulisan
Untuk memudahkan pemahaman terhadap tugas akhir ini maka penulis menyusun sistematika penulisan sebagai berikut:
BAB I : PENDAHULUAN
Bab ini merupakan pendahuluan yang berisikan tentang latar belakang masalah, tujuan penulisan, batasan masalah, manfaat penulisan, metode penulisan, dan sistematika penulisan.
Bab ini berisikan landasan teori dan uraian mengenai generator, umum, prinsip kerja generator, konstruksi generator, pemilihan putaran generator, frekuensi, sistem eksitasi, regulasi tegangan generator dan sinkronisasi paralel lima generator.
BAB III : PELEPASAN BEBAN PADA GENERATOR YANG BEKERJA PARALEL
Bab ini berisikan daya output generator serta hubungannya dengan frekuensi, jenis-jenis gangguan yang terjadi pada generator dan hubungannya dengan pelepasan beban serta pengertian dari pelepasan beban itu sendiri.
BAB IV : PENENTUAN PELEPASAN BEBAN TIBA-TIBA PADA
GENERATOR YANG BEKERJA SECARA PARALEL PADA PT. MANUNGGAL WIRATAMA (SUN PLAZA)
Bab ini berisikan prosedur pelepasan beban pada PT. Manunggal Wiratama (SUN PLAZA) dengan tinjauan frekuensi dan contoh pelepasan bebannya.
BAB V : KESIMPULAN DAN SARAN
BAB II
GENERATOR
II.1. Umum
Salah satu bagian besar dari sistem tenaga listrik adalah stasiun pembangkit tenaga listrik. Stasiun pembangkit tenaga listrik tersebut dapat berupa generator yang digerakkan dengan tenaga gas, tenaga air, tenaga diesel dan lain sebagainya. Pokok utama dalam pengadaan sistem tenaga listrik adalah bagian dari pembangkitnya atau dalam hal ini generatornya. Apabila suatu sistem pembangkit terganggu, maka seluruh sistem tenaga listrik akan terhenti pengoperasiannya.
Penyebab gangguan pada sistem pembangkit terdiri atas dua bagian yaitu:
1. Gangguan dari luar generator, yaitu gangguan dalam sistem yang dihubungkan generator.
2. Gangguan di dalam generator.
3. Gangguan pada mesin penggerak generator.
II.2. Prinsip Kerja Generator
Generator serempak (sinkron) adalah suatu penghasil tenaga listrik dengan landasan hukum Faraday. Jika pada sekeliling penghantar terjadi perubahan medan magnet, maka pada penghantar tersebut akan dibangkitkan suatu gaya gerak listrik (GGL) yang sifatnya menentang perubahan medan tersebut. Untuk dapat terjadinya gaya gerak listrik (GGL) tersebut diperlukan dua kategori masukan, yaitu:
1. Masukan tenaga mekanis yang akan dihasilkan oleh penggerak mula (prime
mover).
2. Arus masukan (If) yang berupa arus searah yang akan menghasilkan medan magnet yang dapat diatur dengan mudah.
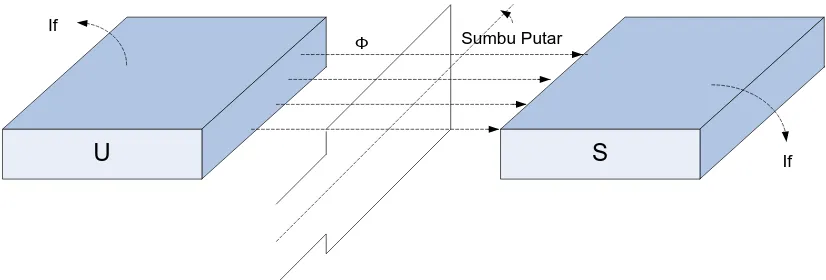
Di bawah ini akan dijelaskan secara sederhana cara pembangkitan listrik dari sebuah generator.
U S
Φ Sumbu Putar If
If
Gambar 2.1. Sistem Pembangkitan Generator Sinkron
dimana:
If : Arus medan
U – S : Kutub generator Sumbu Putar : Poros Generator
Apabila rotor generator diputar pada kecepatan nominalnya, dimana putaran tersebut diperoleh dari putaran penggerak mulanya (prime mover), kemudian pada kumparan medan rotor diberikan arus medan sebesar If, maka garis-garis fluksi yang dihasilkan melalui kutub-kutub inti akan menghasilkan tegangan induksi pada kumparan jangkar stator sebesar:
Ea = C. n. Ф
dimana:
Ea : Tegangan induksi yang dibangkitkan pada jangkar generator C : Konstanta
n : Kecepatan putar
Ф : Fluksi yang dihasilkan oleh arus penguat (arus medan)
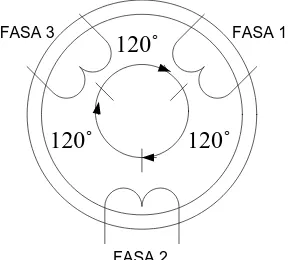
Apabila generator digunakan untuk melayani beban, pada kumparan jangkar generator akan mengalir arus. Untuk generator 3 fasa, setiap belitan jangkar akan memilki beda fasa sebesar 120°.
120˚
120˚ 120˚
FASA 1
FASA 2 FASA 3
Gambar 2.2. Kumparan 3 Fasa
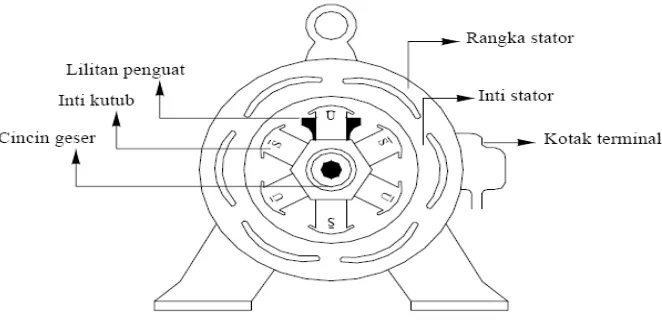
II.3. Konstruksi Generator
1. Bagian yang diam (stator). 2. Bagian yang bergerak (rotor).
Gambar 2.3. Konstruksi Generator Sinkron
II.3.1. Bagian yang diam (Stator)
Bagian yang diam (stator) terdiri dari beberapa bagian, yaitu: 1. Inti stator.
Bentuk dari inti stator ini berupa cincin laminasi-laminasi yang diikat serapat mungkin untuk menghindari rugi-rugi arus eddy (eddy current losses). Pada inti ini terdapat slot-slot untuk menempatkan konduktor dan untuk mengatur arah medan magnetnya.
2. Belitan stator.
Bagian stator yang terdiri dari beberapa batang konduktor yang terdapat di dalam slot-slot dan ujung-ujung kumparan. Masing-masing slot dihubungkan untuk mendapatkan tegangan induksi.
3. Alur stator.
4. Rumah stator.
Bagian dari stator yang umumnya terbuat dari besi tuang yang berbentuk silinder. Bagian belakang dari rumah stator ini biasanya memiliki sirip-sirip sebagai alat bantu dalam proses pendinginan.
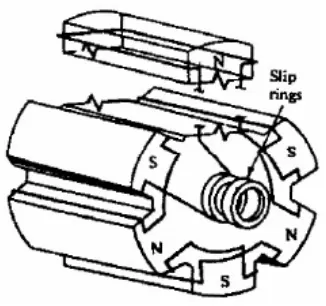
II.3.2. Bagian yang bergerak (Rotor)
Rotor adalah bagian generator yang bergerak atau berputar. Antara rotor dan stator dipisahkan oleh celah udara (air gap). Rotor terdiri dari dua bagian umum, yaitu:
1. Inti kutub
2. Kumparan medan
Pada bagian inti kutub terdapat poros dan inti rotor yang memiliki fungsi sebagai jalan atau jalur fluks magnet yang dibangkitkan oleh kumparan medan. Pada kumparan medan ini juga terdapat dua bagian, yaitu bagian penghantar sebagai jalur untuk arus pemacuan dan bagian yang diisolasi. Isolasi pada bagian ini harus benar-benar baik dalam hal kekuatan mekanisnya, ketahanannya akan suhu yang tinggi dan ketahanannya terhadap gaya sentrifugal yang besar.
Gambar 2.4. Konstruksi Rotor Kutub Silindris
Untuk putaran generator yang relatif rendah atau sedang (kurang dari 1000 rpm), dipakai konstruksi rotor dengan kutub menonjol atau ”salient pole” dengan jumlah kutub-kutub yang relatif banyak.
Gambar 2.5. Konstruksi Generator Kutub Menonjol
Pada prinsipnya, salah satu dari penghantar atau kutub-kutub ini dibuat sebagai bagian yang tetap sedangkan bagian-bagian yang lainnya dibuat sebagai bagian yang berputar.
II.4. Pengaturan Putaran
dihasilkan oleh generator sinkron harus sebanding dengan kecepatan putar generator tersebut. Dalam hal ini, rotor sebagai bagian yang bergerak terdiri atas rangkaian-rangkaian elektromagnet dengan arus searah (DC) sebagai sumber arusnya. Medan magnet rotor akan bergerak sesuai dengan arah putaran rotor. Untuk menjaga putaran tetap konstan, maka pada penggerak mula (prime mover) dilengkapi governor. Governor itu sendiri adalah suatu alat yang berfungsi mengatur putaran tetap konstan pada keadaan yang bervariasi.
Besar kecepatan putaran generator dapat dihitung melalui persamaan berikut:
p f n=120.
dimana:
n = kecepatan putaran (rpm) f = frekuensi (Hz)
p = jumlah kutub
Tegangan dan arus bolak-balik (AC) yang dihasilkan oleh generator umumnya mempunyai frekuensi diantara 50 Hz – 60 Hz. Untuk menentukan jumlah pasang kutub (p) atau kecepatan putar rpm (n), besarnya frekuensi harus sebanding dengan jumlah kutub dan kecepatan putarannya.
II.5. Pengaturan Tegangan
% 100
x V
V V VR
FL FL NL −
=
dimana:
VR = regulasi tegangan (voltage regulation) VNL = tegangan tanpa beban (no load voltage) VFL = tegangan beban penuh (full load voltage)
Generator-generator sekarang dirancang dan dibuat untuk tegangan yang bervariasi akibat dari adanya variasi arus jangkar atau variasi beban yang menimbulkan turunnya tegangan (voltage drop) pada kumparan jangkar yang bervariasi pula. Jatuhnya tegangan impedansi tersebut tergantung kepada besar arus dan faktor daya beban. Dengan pengaturan arus eksitasi, tegangan dapat diatur sesuai dengan kebutuhan. Untuk menaikkan tegangan, arus eksitasi dapat ditambah dan berlaku juga sebaliknya.
Yang dimaksud dengan eksitasi atau biasa disebut sistem penguatan adalah suatu perangkat yang memberikan arus penguat (If) kepada kumparan medan generator arus bolak-balik (alternating current) yang dijalankan dengan cara membangkitkan medan magnetnya dengan bantuan arus searah.
Sistem penguatan dapat digolongkan berdasarakan cara penyediaan tenaganya, yaitu:
1. Sistem penguatan sendiri. 2. Sistem penguatan terpisah.
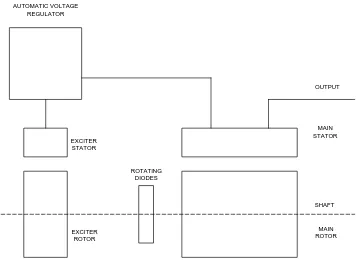
(remanensi) pada stator generator utama yang diberikan oleh stator generator penguat. Arus tersebut diatur terlebih dahulu oleh AVR (automatic voltage regulator) yang merupakan alat pengatur tegangan yang bekerja secara otomatis. AVR dalam hal ini melakukan pengaturan tegangan. Arus yang dihasilkan oleh rotor generator penguat akan disearahkan dengan menggunakan dioda putar (rotating diode) yang ikut berputar dengan kedua rotor generator yang berputar. Sistem penguatan sendiri dipasang pada ujung poros generator utamanya.
AUTOMATIC VOLTAGE REGULATOR
EXCITER STATOR
EXCITER ROTOR
ROTATING DIODES
SHAFT
MAIN ROTOR
MAIN STATOR
OUTPUT
Gambar 2.6. Self Excited AVR Controlled Generator
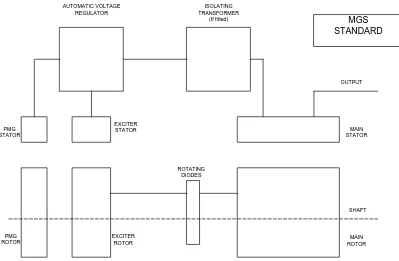
Sebagai salah satu contoh sistem eksitasi penguatan sendiri yang dipakai adalah sistem eksitasi penguatan sendiri dengan menggunakan magnet permanen (permanent
magnet generator excited-AVR controlled generators). Dalam hal ini, generator magnet
MGS STANDARD
AUTOMATIC VOLTAGE REGULATOR
ISOLATING TRANSFORMER
(If fitted)
PMG ROTOR
PMG STATOR
EXCITER STATOR
ROTATING DIODES
EXCITER ROTOR
SHAFT
MAIN ROTOR
MAIN STATOR OUTPUT
Gambar 2.7. Permanent Magnet Generator (PMG) Exciter
II.6. GPC (Generator Paralelling Controller)
GPC adalah suatu unit (alat) yang berfungsi sebagai pengontrol dan pengaman generator. GPC akan mengeluarkan semua kebutuhan serta tugas-tugas untuk mengontrol dan memproteksi operasi sebuah generator tanpa harus memperhatikan penggunaan generator tersebut.
Hal ini berarti GPC dapat digunakan untuk berbagai tipe aplikasi seperti: 1. Satu generator (generator tunggal).
Gambar 2.8. Generator Paralelling Controller (GPC)
Sistem pengukuran GPC adalah melalui tegangan 3 fasa yang diukur pada tegangan generator, arus generator dan tegangan bus utama.
II.6.1. Kontrol Fungsi
Kontrol fungsi dari GPC ini dapat dijelaskan sebagai berikut: 1. Dinamik sinkronisasi.
a. Perubahan frekuensi. b. Check tegangan.
c. Kompensasi waktu tunda pemutus. d. Pemeriksaan urutan fasa.
2. Beban tetap (dasar beban) jalannya generator.
3. Berjalannya frekuensi yang tetap pada generator yang berdiri sendiri.
5. Output rele untuk speed governor.
6. Output rele untuk menutup dan membukanya pemutus generator. 7. Mengatur ramp – up dan ramp – down dari beban generator.
8. Output rele untuk start – stop generator berikutnya (berdasarakan tinggi rendahnya beban).
II.6.2. Fungsi Proteksi Generator
Proteksi terhadap generator yang terdapat pada operasi sistem GPC dapat dibagi atas dua kelompok, yaitu proteksi untuk:
1. Daya balik (reverse power). 2. Over current (dengan 2 level).
Fungsi proteksi terhadap generator dapat dipilih untuk mengaktifkan salah satu dari empat rele yang dapat disusun. Opsi A dan Opsi B tidak dapat dipilih pada waktu yang bersamaan diantara fungsi keduanya.
a. Opsi A
1. Vector jump.
2.
dt df
(rocof).
3. Over voltage (2 level). 4. Low voltage (2 level). 5. Over frekuensi (2 level). 6. Low frekuensi (2 level). b. Opsi B Bus Proteksi
2. Low voltage (2 level). 3. Over frekuensi (2 level). 4. Low frekeunsi (2 level).
c. Opsi D Tegangan, VAR/Power Factor Control
Pemilihan yang dipilih pada opsi D dapat diaktifkan dengan cara pemilihan mode dari GPC itu sendiri (mode input 4, 5 dan 6).
d. Opsi E Analog Governor dan Output AVR Control
Pemilihan opsi E memerlukan papan tambahan yang akan diletakkan pada slot #4 yaitu pada terminal 65 – 72 dimana ada dua output analog hadir berkisar ±20 mA. Output ini diberi penguatan terpisah. Bagian GPC yang terakhir adalah output aktif (tidak memerlukan tambahan tegangan dari luar).
e. Opsi F1, 2x Transducer Output
Pemilihan opsi F1, berarti ada sebuah papan tambahan yang akan ditambahkan pada slot #6 (terminal 90 – 97) dimana terdapat dua output analog (0 – 20 mA). Output diberi penguatan terpisah dan di GPC terakhir outputnya adalah output aktif (tidak memerlukan tambahan tegangan dari luar).
Unit GPC dikemas dalam papan-papan slot. Beberapa ada yang telah standar (tidak dapat diubah-ubah) dan ada juga beberapa yang dapat diubah-ubah untuk tiap opsi-opsinya.
Slot #1 standard terminal 1 -28
Slot #2 terminal 29 – 34
Slot #3 terminal 37 – 64
Slot #5 standard terminal 73 – 89
Slot #6 terminal 90 – 97
Slot #7 tidak digunakan terminal 98 – 125
Slot #8 terminal 126 – 133
Di samping slot-slot ini, terdapat sebuah papan komunikasi tambahan (Rs 232 PC servis) tempat berlangsungya pemrogaman dari set point, waktu, display dan sebagainya.
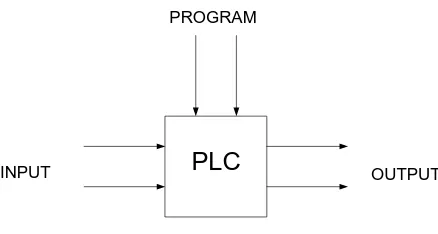
II.7. PLC
Programmable Logic Controller (PLC) meupakan suatu bentuk pengontrol berbasis mikroprosesor yang memanfaatkan memori yang dapat diprogram untuk menyimpan instruksi-instruksi dan mengimplementasikan fungsi-fungsi seperti logic,
sequencing, timing, counting dan aritmatika untuk mengontrol mesin-mesin dan
proses-proses yang terjadi.
PLC
INPUT OUTPUT
[image:31.612.198.417.463.580.2]PROGRAM
Gambar 2.9. Blok Pengontrol PLC
PLC sama halnya dengan komputer namun bedanya komputer dioptimalkan untuk tugas perhitungan dan penyajian data, sedangkan PLC dioptimalkan untuk tugas-tugas pengontrolan dan pengoperasian di dalam lingkungan industri.
1. Kokoh dan dirancang tahan terhadap getaran, suhu, kelembaban dan kebisingan. 2. Antar muka untuk input dan output telah tersedia di dalamnya.
3. Mudah diprogram dan menggunakan bahasa pemrogaman yang mudah dipahami yang sebagian besar berkaitan dengan operasi-operasi logika dan penyambungan.
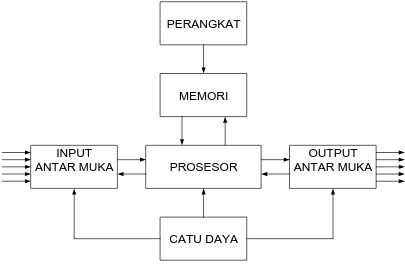
PERANGKAT
MEMORI
PROSESOR
CATU DAYA
OUTPUT ANTAR MUKA INPUT
[image:32.612.102.507.182.446.2]ANTAR MUKA
Gambar 2.10. Diagram Blok PLC
Umumnya sebuah sistem PLC memiliki komponen-komponen dasar. Komponen-komponen ini adalah unit prosesor, memori, unit catu daya, bagian antar muka input – output dan perangkat pemrogaman.
2. Unit catu daya diperlukan untuk mengkonversikan tegangan AC sumber menjadi tegangan DC 5V yang dibutuhkan oleh prosesor dan rangkaian-rangkaian dalam modul-modul input/output antar muka.
3. Perangkat pemrogaman digunakan untuk memasukkan program yang dibutuhkan ke dalam memori. Program tersebut dibuat dengan menggunakan perangkat ini yang kemudian dipindahkan ke dalam unit memori PLC.
4. Unit memori adalah tempat dimana program yang digunakan untuk melaksanakan tindakan-tindakan pengontrolan oleh mikroprosesor disimpan.
5. Bagian input dan output adalah antar muka dimana prosesor menerima informasi ke perangkat-perangkat eksternal.
II.8. Operasi Paralel Generator
Operasi paralel pusat-pusat tenaga listrik pada dasarnya merupakan perluasan kerja paralel satu generator dengan generator lain dengan tambahan resistansi dan reaktansi saluran-saluran interkoneksi yang biasa disebut sinkronisasi.
Dalam melakukan sinkronisasi generator harus memenuhi beberapa syarat, yaitu: 1. Tegangan apitan dari generator yang akan diparalelkan harus sama dengan
tegangan jaringan.
2. Frekuensi generator harus sama dengan frekuensi jaringan.
3. Sudut fasa dari dari fasa-fasa yang dihubungkan satu sama lain harus sama besar. 4. Urutan fasa kelima generator harus sama dan urutan fasa generator yang akan
Dimisalkan lima generator G1, G2, G3, G4 dan G5 yang bekerja paralel seperti pada gambar berikut.
AC
AC AC AC AC
G1
G2
G3
G4
G5
X1
X2
X3
X4
X5
R1
R2
R3
R4
R5 E1
E2
E3
E4
E5
Gambar 2.11. Operasi Paralel Lima Generator
Terlihat masing-masing generator memiliki impedansi Z1, Z2, Z3, Z4 dan Z5 yang tediri dari resistansi R1, R2, R3, R4, R5 dan X1, X2, X3, X4 dan X5. Gaya gerak listrik yang diinduksikan dalam masing-masing mesin adalah E1, E2, E3, E4 dan E5. Untuk mempermudah, diambil contoh operasi paralel untuk dua generator.
1
E E2
[image:34.612.238.413.506.594.2]r E s I
1
E E2
r E
[image:35.612.220.393.78.139.2]s I
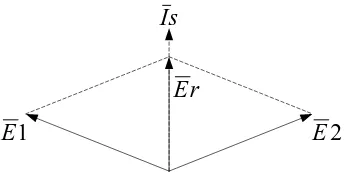
Gambar2.13. Paralel Dua Generator Resistensi Diabaikan
Misalkan untuk keadaan khusus dimana reaktansi kedua mesin diabaikan. Dalam keadaan demikian, kedua GGL E1 dan E2 memiliki selisih fasa 180˚ (gambar 2.12) dan resultan Er hampir tegak lurus terhadap E1 dan E2.
Besar arus sinkronisasi dapat dinyatakan dengan persamaan:
(
Z1 Z2)
Er Is+ =
Misalkan kini kedua mesin hanya memiliki reaktansi mendekati nol. Arus sinkronisasi Is akan tegak lurus terhadap GGL Er atau sefasa dengan GGL salah satu mesin, misalkan E2 (gambar 2.13). dalam hal ini mesin 2 akan memberi daya nyata kepada mesin 1 agar mesin dapat berjalan. Dengan demikian, dapat disimpulkan reaktansi mutlak diperlukan untuk paralel generator.
Bila dua generator berada dalam keadaan sinkronisasi penuh. Maka kedua GGL yang diinduksikan adalah sama dan berbeda fasa 180˚, sebagaimana terlihat pada gambar 2.14, dan tidak terdapat arus mengalir dalam rangkaian setempat. Bilamana kedua GGL sama besarnya tetapi berbeda fasa tidak tepat 180˚ maka resultan GGL Er bergerak di dalam rangkaian setempat dan mengakibatkan mengalirnya arus sinkronisasi.
0
1
E E2
r E
1
E
2
E
2
E
α θ φ1
2
[image:36.612.204.410.73.137.2]φ
Gambar 2.15. Arus Sinkronisasi Tidak Penuh
Misalkan beda fasa antara kedua GGL sebesar α dan E1=E2=E, maka resultan GGL Er
adalah:
°−
=
2 180 cos
2E α
Er
E E E E
α α
α α
=
=
=
°−
=
2 2
2 sin 2
2 90 cos 2
Pendekatan di atas berlaku jika sudut α memiliki nilai yang kecil sekali. Besar arus
sinkronisasi Is adalah:
Z E Is = r
Z E
α =
Dengan catatan bahwa Is tertinggal fasa sebesar θ, dimana:
= −
R X
tg 1 s
θ
s s
X E I =
dan tertinggal fasa 90˚ dengan GGL resultan Er.
AC
AC
AC
AC
AC
LOAD 200 KVA
380 V
400 V/20KV
400 V/20 KV
[image:37.612.157.454.154.270.2]400 V/20 KV
Gambar 2.16. Paralel Lima Generator Melayani Beban
Adapun prosedur sinkronisasi generator-generator yang bekerja paralel dapat disusun sebagai berikut:
1. Menjalankan mesin penggerak mula (prime mover), kemudian tahanan R diperkecil sampai diperoleh tegangan V dan frekuensi Hz yang dikehendaki. 2. Bila tegangan V generator dan frekuensi Hz generator sama dengan tegangan
jala-jala dan frekuensi jala-jala-jala-jala maka yang harus diperhitungkan lagi adalah membuat agar tegangan generator sefasa dengan tegangan jala-jala.
3. Untuk membuat tegangan generator sefasa dengan tegangan jala-jala maka putaran generator harus diubah sampai mendapatkan beda fasa yang sama.
4. Bila lampu indikator PLN mati, generator telah berhasil paralel dengan jaringan (jala-jala).
II.9. Pembagian Beban Pada Generator yang Bekerja secara Paralel
pembagian beban reaktif (VAR) dan pembagian beban aktif (Watt). Jumlah vektor kedua beban tersebut adalah beban kompleks (beban semu) yang dilambangkan dengan S, dengan kata lain:
S = P + jQ
dimana:
S = daya semu (VA atau KVA) P = daya aktif (Watt atau KW) Q = daya reaktif (VAR atau KVAR)
Besar daya dari lima generator yang bekerja paralel adalah sebagi berikut:
ϕ
S1
S2
S3
S4
S5
P1 P2
P3
P4
P5
Q2
Q1 Q3 Q4 Q5
5 4 3 2
1 P P P P
P
PT O T A L= + + + +
KVAR
[image:38.612.179.435.320.524.2]KW KVA
Gambar 2. 17. Pembagian Beban antar Lima Generator Paralel
dimana:
P = daya aktif yang dipikul generator 1, 2, 3, 4 dan 5 Q = daya reaktif generator 1, 2, 3, 4 dan 5
Dalam hal ini:
• P1 = P2= P3= P4 = P5.
• Q1= Q2= Q3= Q4 = Q5, sehingga,
• S1 = S2 = S3 = S4 = S5, yang artinya daya generator sama.
Misalkan diambil dua generator yang bekerja paralel dengan karakteristik kecepatan dan beban yang tepat sama dengan suatu tegangan apitan bersama sebesar V dan dengan beban impedansi sebesar Z. Dimisalkan GGL dari generator 1 dan 2 sebesar E1 dan E2 dan impedansi fasa masing-masing Z1 dan Z2.
Tegangan apitan generator 1 adalah:
1 1
1 I Z
E
V = −
Tegangan apitan generator 2 adalah:
2 2
2 I Z
E
V = −
Juga berlaku:
(
I I)
Z ZI
V = . = 1+ 2
Sehingga diperoleh:
1 1 1
Z V E
I = −
2 2 2
Z V E
I = −
Kemudian diperoleh:
2 2
1 1 2 1
Z V E Z
V E I
I + = − + −
2 2
1 1
2 1
1 1 1
Z E Z E Z Z Z
V = +
+ +
atau:
Z Z Z
Z E Z E
V
1 1 1
2 1
2 2
1 1
+ +
+ =
AC
AC
Z1
Z2
Z
I1
[image:40.612.172.450.67.388.2]I2
BAB III
PELEPASAN BEBAN PADA GENERATOR YANG BEKERJA
PARALEL
III.1. Daya Output Generator
Generator sebagai sumber dari daya aktif maupun daya reaktif, dapat diatur keluarannya. Dalam keluaran dayanya, komponen yang mengalamai pembagian beban adalah komponen daya aktif. Daya output aktif ini dapat diatur melalui energi masukan (input) dari generator. Besarnya daya aktif tiap generator dapat dihitung dengan persamaan:
θ cos . . . 3V I P=
dimana:
P = daya aktif generator (Watt) V = tegangan terminal (Volt) I = arus generator (Ampere)
Besarnya arus yang mengalir dari tiap-tiap generatornya adalah:
1 1 1
Z V E
I = −
1 2 2
Z V E
I = −
1 3 3
Z V E
I = −
1 4 4
Z V E
1 5 5
Z V E
I = −
Atau dapat dirumuskan sebagai berikut:
n n n
Z V E
I = −
dimana:
I = arus generator (Ampere) V = tegangan terminal (Volt)
E = tegangan induksi generator (Volt)
Pada penguatan konstan pada lima generator yang bekerja paralel berlaku,
(
I I I I I)
ZV = 1+ 2 + 3 + 4 + 5 .
dimana:
V = tegangan terminal (Volt) I1-5 = arus generator 1-5 (Ampere) Z = impedansi generator (Ohm)
Dalam sistem kelistrikan pada PT. Manunggal Wiratama, unit generator yang terpasang pada sistem berjumlah enam buah. Akan tetapi dalam unit pembangkitannya, generator yang bekerja hanya lima buah karena salah satu generator mengalami kerusakan. Hal ini perlu diperhitungkan untuk dapat menghitung penurunan frekuensi sistem secara keseluruhan dan pelepasan beban sistem secara keseluruhan.
Arus yang mengalir ke beban adalah:
5 4 3 2
1 I I I I
I
Daya aktif yang dipikul setiap generator:
1 1 1
1 3.V .I .cosθ
P =
2 2 2
2 3.V .I .cosθ
P =
3 3 3
3 3.V .I .cosθ
P =
4 4 4
4 3.V .I .cosθ
P =
5 5 5
5 3.V.I .cosθ
P =
Sehingga dapat dirumuskan:
n n
n V I
P = 3. . .cosθ
Besarnya daya aktif yang dibangkitkan generator ditentukan oleh energi input dari penggerak mula yang diterima oleh generator. Oleh karena itu, pembagian daya generator dilakukan melalui pengaturan energi input dari generator yaitu dengan mengatur kopel daya masuk pada penggerak mula (prime mover). Dengan demikian, untuk generator-generator yang bekerja secara paralel berlaku ketentuan-ketentuan sebagai berikut:
1. Beban yang dipikul oleh masing-masing generator tergantung dari besarnya kopel daya masukan pada penggerak mula generator itu sendiri.
Penyesuaian daya aktif ini dilakukan dengan mengatur besarnya kopel penggerak generator.
Dalam sistem tenaga listrik yang pada umumnya menggunakan generator sinkron tiga fasa untuk pembangkit tenaga listrik yang utama, maka pengaturan frekuensi sistem praktis tergantung kepada karakteristik generator sinkron.
Menurut hukum Newton, diperoleh hubungan antara kopel mekanis penggerak generator dengan perputaran generator, yaitu:
(
)
dt d H T
TG− B = × ω
dimana:
TG = kopel penggerak generator (MW Hz)
TB = kopel beban yang membebani generator
(
)
Hz MW
H = momen inersia dari generator beserta mesin penggeraknya (sekon)
ω = kecepatan sudut perputaran generator (rpm)
Sedangkan frekuensi yang dihasilkan generator adalah:
( )
Hz fπ ω 2 =
Ditinjau dari segi beban sistem, frekuensi akan turun apabila daya aktif yang dibangkitkan tidak mencukupi kebutuhan beban dan sebaliknya frekuensi akan naik apabila ada surplus daya aktif dalam sistem.
Secara mekanis dengan melihat persamaan-persamaan di atas, ini berarti bahwa: TG – TB = ∆T < 0, frekuensi turun
TG – TB = ∆T > 0, frekuensi naik
Secara tidak langsung penyediaan daya reaktif dapat pula mempengaruhi frekuensi sistem, karena penyediaan daya reaktif mempunyai pengaruh besar terhadap kenaikan tegangan yang selanjutnya dapat menyebabkan kenaikan beban daya aktif.
III.2. Pengaruh Perubahan Eksitasi
Perubahan eksitasi akan mempengaruhi sistem operasi generator-generator yang bekerja paralel dengan kapasitas generator yang sama, yang mana masing-masing generator tersebut akan memikul daya aktif yang sama tetapi daya reaktifnya berbeda.
Dimisalkan mula-mula generator dalam keadaan seimbang, P1 = P2 = P3 = P4 = P5, Q1 = Q2 = Q3 = Q4 = Q5 dan S1 = S2 = S3 = S4 = S5. Eksitasi generator satu dinaikkan sehinga eksitasi generator satu akan lebih besar dari eksitasi generator dua, maka tegangan generator satu akan lebih besar dari tegangan generator dua. Akibatnya mengalir arus sinkronisasi dari generator satu ke generator dua sampai generator lima sebesar:
s s
Z
E E E E E
I = 1 − 2 − 3 − 4 − 5
dimana:
5 4 3 2
1 Z Z Z Z
Z
dimana:
E1 = tegangan induksi generator 1 E2 = tegangan induksi generator 2 E3 = tegangan induksi generator 3 E4= tegangan induksi generator 4 E5 = tegangan induksi generator 5 Z1 = impedansi generator 1 Z2 = impedansi generator 2 Z3 = impedansi generator 3 Z4 = impedansi generator 4 Z5 = impedansi generator 5
III.3. Gangguan Pada Generator yang Bekerja Paralel
Apabila beban yang harus dipikul generator melebihi kapasitas daya yang dibangkitkannya, generator yang baru harus dioperasikan juga untuk membantu generator yang memikul beban tersebut dengan memparalelkannya. Setelah generator itu bekerja paralel akan terdapat beberapa kemungkinan kendala-kendala yang akan timbul yang dapat mengganggu kerja paralel generator tersebut atau dengan kata lain akan timbul gangguan pada generator yang bekerja paralel tersebut.
Gangguan-gangguan pada generator secara garis besar terdiri dari: 1. Gangguan di luar generator.
generator yang tidak beroperasi tidak diperhitungkan karena tidak dapat memberikan dampak gangguan kepada sistem.
Penyebab utama dari jenis gangguan ini adalah gangguan yang diakibatkan oleh sambaran petir. Bagian yang sering menerima sambaran petir adalah bagian saluran udara transmisi sistem. Dengan kata lain, sumber lokasi dari gangguan diluar generator adalah saluran udara transmisinya. Demikian juga dengan saluran udara distribusi sistem karena selain rentan akan sambaran petir, saluran udara distribusi dapat juga terganggu oleh adanya tanaman-tanaman sekitar.
2. Gangguan yang terjadi di dalam generator.
Adapun gangguan-gangguan yang mungkin terjadi di dalam generator antara lain: a. Gangguan hubung singkat antar fasa.
Gangguan ini merupakan jenis gangguan yang terjadi sebagai akibat adannya hubung singkat sehingga pada kumparan stator akan dibangkitkan arus yang besar sehingga dalam waktu detik akan tercapai panas yang berlebihan yang akan menimbulkan hubung singkat di isolasi kumparan stator dan berakibat kerusakan pada generator.
b. Gangguan panas (suhu tinggi).
c. Gangguan penguatan hilang.
Ketika terjadi gangguan pada rangkaian arus penguat, medan penguat generator akan melemah atau dapat dikatakan hilang yang dapat menyebabkan generator berada pada kondisi out of step atau lepasanya generator dari sistem sinkronisasi yang berakibat gangguan pada sistem terutama pada generator yang besar.
d. Gangguan hubung singkat pada rangkaian rotor.
Apabila rangkaian rotor mengalami gangguan, generator akan mengalami loss of
field atau kehilangan medan dan juga rangkaian rotor dan rotor generator dapat
mengalami kerusakan disebabkan adanya arus hubung singkat pada rangkaian generator. Jika hanya salah satu kutub (kutub + atau kutub -) terhubung ke tanah, hal ini dapat menimbulkan distorsi dalam medan magnet penguat yang akan menimbulkan getaran yang berlebihan.
e. Gangguan pada mesin penggerak (prime mover) yang memerlukan pelepasan pemutus tegangan (PMT) generator.
Jika salah satu generator yang bekerja paralel mengalami salah satu dari enam jenis gangguan di atas, generator lainnya akan merasakan gangguan itu juga.
III.4. Pelepasan Beban Pada Generator
Apabila suatu generator yang bekerja paralel melayani beban mengalami gangguan seperti yang telah diutarakan di sub bab terdahulu, salah satu generator dari sistem paralalelnya harus segera dimatikan. Hal ini akan menyebabkan daya listrik total yang dibangitkan oleh generator yang bekerja paralel akan berkurang.
Untuk mengimbangi berkurangnya daya listrik yang dibangkitkan oleh generator yang bekerja paralel tersebut sebagian beban harus dilepaskan supaya generator-generator yang masih bekerja tidak memikul beban yang berlebih dan frekuensi dari sistem tidak turun jauh dari batas yang telah diijinkan. Pelepasan beban ini harus dilakukan secara cepat dan tepat agar sistem tidak sampai padam.
Dalam penentuan pelepasan sebagian beban ini harus ditentukan terlebih dahulu lokasi dari beban-beban yang akan dilepaskan. Beban-beban yang akan dilepaskan dipilih berdasarkan kepentingan dari beban itu sendiri dan juga kepekaanya pada frekuensi sistem sehinggan beban yang dirasa penting akan tetap terlayani walaupun terjadi penurunan daya listrik yang disediakan oleh pembangkit.
Perencanaan pelepasan beban haruslah diusahakan secara otomatis agar dapat dilakukan secara cepat dengan menggunakan bantuan alat-alat yang bekerja dengan cepat serta mampu melindungi sistem dengan tepat apabila terjadi gangguan pada salah satu generator yang bekerja paralel.
Kriteria yang diinginkan pada proses pelepasan beban dapat dirumuskan sebagai berikut:
1. Pelepasan sebagian beban dilakukan agar frekuensi sistem tidak melewati batas minimum yang telah ditentukan dari sistem.
2. Pelepasan beban harus dilakukan dengan cepat sehingga kondisi beban lebih pada sistem tidak mempengaruhi generator lain yang masih bekerja dengan baik lebih lama lagi.
3. Karena fungsi pelepasan sebagian beban adalah untuk menstabilkan frekuensi sistem, pelepasan beban hanya dapat dilakukan pada saat sisi pembangkit tidak sanggup lagi memikul beban yang dilayaninya yang disebabkan oleh naiknya beban secara tiba-tiba atau terganggunya salah satu generator yang bekerja paralel.
Perumusan untuk pelepasan sebagian beban ditentukan oleh 4 parameter umum, yaitu:
1. Besarnya daya yang hilang pada pembangkit. 2. Konstanta inersia sistem.
3. Karakteristik frekuensi daya beban.
4. Respon governor dari penggerak mula (prime mover).
Ketika beban naik dalam sistem, governor akan merasakan perubahan kecepatan yang akan menaikkan daya masukan ke generator. Beban lebih akan diatasi dengan menaikkan kapasitas dari operasi generator yang belum dipakai dalam sistem (spinning
reverse nominal 0), pada saat inilah diperlukan pengurangan beban, sama atau lebih besar
dari beban lebih secara cepat.
Dalam hal ini frekuensi merupakan indikator yang dapat diandalkan dalam situasi beban lebih (overload). Oleh karena itu, rele frekuensi yang sensitif dapat digunakan untuk memutuskan sejumlah beban dalam pelepasan beban otomatis. Pemutusan beban ini dibantu oleh UFR (Under Frequncy Relay).
Rele frekuensi turun (Under Frequency Relay) biasanya digunakan pada sub stasiun distribusi dimana beban yang dipilih untuk dilepas dapat diputuskan secara tepat yang akan mengembalikan kestabilan sistem. Dalam menginstal rele ini, biasanya dipakai lebih dari satu rele tergantung dari level pelepasan beban yang dirancang untuk sistem. Untuk pelepasan beban dengan 2 level, rele level 1 diatur settingannya sedikit dibawah dari range operasional frekuensi (misalnya 49,4 – 49,7 Hz). Ketika frekuensi turun di bawah level ini, rele ini akan melepaskan beban. Jika frekuensi telah naik mencapai tingkat kestabilan sistemnya, hal ini berarti pelepasan beban telah berhasil dilakukan. Namun apabila frekuensi masih tetap juga turun dengan rata-rata yang lebih sedikit dari penurunan pertamanya mencapai rating rele level 2, sejumlah beban berikutnya akan dilepas. Hal ini akan terus berlanjut bergantung dari jumlah rele yang digunakan dan lamanya tercapai kestabilan sistem.
Adapun prosedur dalam merancang pelepasan beban pada sistem adalah sebagai berikut:
1. Beban Lebih Maksimum (Maximum Overload).
tidak adanya batasan pasti besarnya beban yang harus dilepas karena pelepasan beban yang dirancang harus dapat melepas 100% dari beban jika diperlukan untuk melindungi sistem.
2. Level Pelepasan Beban.
Ketika rele merasakan penurunan frekuensi dalam sistem, biasanya level pertama dari pelepasan beban akan melepaskan sejumlah beban yang telah ditentukan terlebih dahulu. Apabila frekuensi dari sistem tersebut belum mencapai nilai yang diinginkan, rele berikutnya melaksanakan proses pelepasan berikutnya (level kedua). Penentuan level dari pelepasan beban tergantung kebutuhan dari sistem. Jumlah level dari pelepasan beban ini berada antara 2 – 5 level. Umumnya digunakan pelepasan beban dengan 3 level.
3. Besar beban yang dilepas setiap level.
Besar dari beban yang harus dilepaskan setiap level bergantung kepada konfigurasi dari sistem dan persentase pelepasan beban setiap levelnya. Sebagai contoh, dalam sistem pelepasan beban 3 level dapat dirancang persentase pelepasan beban tiap levelnya sebagai berikut:
Level 1: Melepas 12% dari total beban
Level 2: Melepas penambahan 8% dari sisa beban (20% dari total) Level 3: Melepas penambahan 12% dari sisa beban (32% dari total) 4. Pengaturan frekuensi.
BAB IV
PENENTUAN PELEPASAN BEBAN TIBA-TIBA PADA
GENERATOR YANG BEKERJA SECARA PARALEL PADA PT.
MANUNGGAL WIRATAMA (SUN PLAZA)
IV.1. Data Beban Generator
Beban generator pada PT. Manunggal Wiratama (Sun Plaza) dikelompokkan ke dalam empat zona yaitu zona A, zona B, zona C dan zona D. Pembagian beban pada keempat zona tersebut didasarkan pada letak dari beban yang dipikul oleh pembangkit. Setiap zona dilayani oleh masing-masing Low Voltage Sub Station (LVSS).
Adapun Low Voltage Sub Station (LVSS) utuk tiap zona: 1. Zona A oleh Low Voltage Sub Station (LVSS) 1
2. Zona B oleh Low Voltage Sub Station (LVSS) 2 3. Zona C oleh Low Voltage Sub Station (LVSS) 3 4. Zona D oleh Low Voltage Sub Station (LVSS) 4
Motor chiller (CHSS1, CHSS2, CHSS3 dan CHSS4) masing-masing 650 kVA yang merupakan beban yang dilepaskan dalam sistem jika ada gangguan pada unit pembangkit yang mengharuskan adanya pelepasan beban dilayani oleh Low Voltage Sub
Station (LVSS) tersendiri.
IV.2. Perhitungan Penurunan Frekuensi karena Gangguan pada Generator
Dalam sub bab ini akan dibahas bagaimana menghitung penurunan frekuensi yang terjadi dalam sistem sebagai akibat gangguan unit pembangkit yang mengalami trip tanpa memperhitungkan respon governor. Respon dari governor tidak diperhitungkan agar didapat hasil perhitungan yang lebih aman, karena perhitungan penurunan frekuensi sebagai akibat tripnya salah satu unit pembangkit dimaksudkan untuk merencanakan pelepasan beban dengan menggunakan Under Frequency Relay (UFR) untuk menghindarkan gangguan semi total dalam sistem yang disebabkan terlalu banyak unit pembangkit yang ikut trip karena terjadi beban lebih. Sebelum ada unit pembangkit yang trip, keadaan sistem seimbang, artinya daya yang dibangkitkan dalam sistem sama dengan beban (PG = PB).
Jika unit pembangkit yang trip sebelum trip membangkitkan daya sebesar Ps ke dalam sistem, maka pada saat unit trip dalam sistem terjadi kekurangan daya yang dibangkitkan. Kekurangan daya inilah yang menyebabkan frekuensi turun. Secara fisik, kekurangan daya ini menyebabkan kopel yang dihasilkan generator-generator dalam sistem TG menjadi lebih kecil daripada kopel beban TB sehingga menurut persamaan di atas:
∆T = TG – TB adalah < 0
Nilai ∆T < 0 ini menyebabkan terjadinya percepatan negatif atas kecepatan sudut rotor generator, karena:
Hz MW dt d I
T = ω
∆
I = momen inersia bagian-bagian yang berputar dari sistem
(
3)
Hz MW
Dinyatakan dalam frekuensi melalui pesamaan ω =2.π.f didapat:
dt df I T = .2π ∆
dimana:
∆Fo = frekuensi sistem
( )
HzPGo = besar daya yang dibangkitkan dalam sistem sebelum ada gangguan unit pembangkit
( )
MWTo = saat terjadinya gangguan unit pembangkit PBo = beban sistem sebelum gangguan
( )
MWPso = besar selisih daya antara yang dibangkitkan dengan beban setelah ada gangguan, dalam hal ini sama dengan besarnya daya yang dibangkitkan oleh unit yang terganggu
( )
MWMaka:
0
0 TG.ω
P =
(
0 0)
0 00 P PS PB PS
T = − − =−
∆ ω
( )
MWdimana:
P0 = PB0 karena sebelum gangguan daya dibangkitkan adalah sama dengan beban dimana tanda negatif menunjukkan adanya kekurangan daya yang dibangkitkan. Sehingga dapat diperoleh persamaan:
dt df I PS
. . 2
0
0 π
ω =
dt df I PS0 =2π. .ω0. −
Karena ω =0 2π.I.2π.f0, selanjutnya didapat:
dt df f I PS0 =2π. .2π. 0. −
dt df I f . . . 4π2 0
=
( )
MWKebesaran yang menyangkut energi mekanik dinyatakan dengan KE yang besarnya:
Hz MW I
KE . . 2 2
1 ω
=
. .
(
2 .)
22 1
f I π
=
=2π2.I.f2
2 2
.
2 f
H I
π =
Kemudian akan didapat persamaan:
dt df
f H f
PS .
. 2 . .
4 2
0 2 0 2 0
π π
= −
dt df f
H
. 2
0
=
atau:
sekon Hz P H f dt df
S 0 0
. 2 − =
Dari persamaan di atas dapat dihitung nilai
dt df
untuk nilai PS0 tertentu sesaat setelah
terjadinya gangguan unit pembangkit yang sebelumnya menyumbangkan daya ke dalam sistem sebesar PS0.
H seperti telah disebutkan di atas adalah energi kinetis dalam sistem dibagi daya terpasang dalam sistem yang dinyatakan dalam MW. Nilai H dinyatakan dalam sekon (s)
dan berada diantara 2s – 8s. Untuk keperluan menghitung
dt df
seperti persamaan di atas,
energi kinetis maupun daya yang terpasang yang dipakai untuk menghitung nilai H, haruslah dari sistem tanpa kebesaran unit yang terganggu. Karena merupakan energi kinetis per daya yang terpasang, jadi dalam per unit, maka PS0 yang dinyatakan dalam per unit adalah:
T S T G
S
P P
P
0 0
0
−
dimana:
PG0T = daya terpasang dalam MW dari unit-unit pembangkit yang beroperasi sebelum ada gangguan
PS0T = daya terpasang dalam MW dari unit yang mengalami gangguan
Dengan menggunakan kebesaran-kebesaran per unit seperti yang dipakai untuk H maka persamaan akan menjadi:
T S T G
S
P P
P H
f dt df
0 0
0 0
.
2 −
− =
Keharusan menyatakan nilai PS0 dalam per unit kalau nilai H dinyatakan dalam per unit adalah agar dimensi ruas kiri dan dimensi ruas kanan persamaan menjadi sama, yaitu
sekon Hertz
Karena persamaan di atas merupakan hasil penurunan dari persamaan sebelumnya yang mengubah kebesaran kopel ∆T menjadi daya melalui hubungan −PS0 =∆T.ω0 atau
0
0 T.2 .f
PS =∆ π , harus diingat bahwa:
1. Nilai frekuensi turun dengan kecepatan
dt df
sejak mulai terjadinya gangguan yaitu
sejak t0, berarti pada saat setelah terjadi gangguan nilai frekuensi sudah lebih kecil daripada f0, sehingga menurut persamaan nilai
dt df
juga turun.
2. Dengan turunnya nilai frekuensi maka governor akan bereaksi dan akan melakukan pengaturan primer untuk memperkecil nilai ∆T.
3. Dengan turunnya nilai frekuensi, besarnya beban juga turun dimana untuk perubahan frekuensi sebesar ∆f akan terjadi perubahan sebesar:
f D
PB = ∆
∆ .
Dalam hal ini,
f P
D B
∂ ∂
= adalah sebuah faktor yang menggambarkan besarnya
perubahan frekuensi beban yang terjadi dalam sistem sebagai akibat terjadinya perubahan frekuensi.
Untuk menyederhanakan perhitungan, yaitu menghitung bagaimana frekuensi menurun sebagai fungsi waktu, dilakukan langkah-langkah sebagai berikut:
a. Diambil selang waktu yang cukup kecil, misalnya 0,1 detik, dalam selang waktu
ini nilai
dt df
Makin kecil selang waktu yang diambil, makin teliti perhitungan yang didapat. Pada permulaan selang waktu pertama yaitu pada saat t0 sampai t1 sama dengan seperti nilai yang ditunjukkan oleh persamaan umum.
Pada akhir selang waktu yang pertama yang merupakan permulaan selang waktu yang kedua, yaitu pada saat t1, nilai frekuensi adalah:
(
1 0)
10 0
1 t t
dt df F
F × −
+ =
−
dimana
1 0−
dt df
adalah nilai
dt df
dalam selang waktu antara t0 dan t1.
b. Untuk selang waktu berikutnya yaitu antara t1 dan t2 harus dilakukan perhitungan untuk mencari nilai permulaan dari frekuensi dan selisih daya yang dibangkitkan untuk mencari nilai permulaan dari frekuensi dan selisih daya yang dibangkitkan dengan beban:
1 1
1 B
S P P
P = −
=
(
PG0−PS0)
−PB1Dimana P1 adalah daya yang dibangkitkan pada saat t1 yang dalam hal ini dianggap sama dengan P0−PS0 karena dalam perhitungan ini diasumsikan
bahwa governor belum bereaksi untuk menambah daya. Dengan cara yang serupa seperti ketika menghitung nilai:
1 0−
dt df
, maka:
(
)
T S T G
B S G
P P
P P P H f dt
df
0 0
1 0 0 1
2 1
.
2 −
− − =
Untuk t = t0 nilai PB = PG sehingga kalau dimasukkan dalam persamaan, maka persamaan akan berubah dengan f = f0− f1 dan D harus diketahui.
Begitu seterusnya dapat dilakukan perhitungan yang serupa untuk selang-selang waktu berikutnya.
Frekeunsi (Hertz)
Waktu (Detik) F0
F1
F2
F3
0 t1 t2 t3 t4
[image:61.612.134.490.177.501.2]t
∆
Gambar.4.1. Perubahan Frekuensi Secara Step by Step
IV.2.1. Analisa Konstanta Momen Inersia dengan Penurunan Frekuensi
Daya sistem sebelum gangguan(SG0) = 6,2 MVA
Daya yang dibangkitkan (SS0) = 80 % dari daya terpasang generator Daya terpasang generator (SS0T) = 2 MVA
Frekuensi nominal sistem ( f ) 0 = 50 Hz
Jumlah kutub (p) = 4
Momen inersia (H) = 2 sekon
sekon H
H
S S H H
system system
system mach mach system
66 , 0
9600 1600 . 2
.
= = =
dipakai ∆t = 0,1 sekon
Penurunan frekuensi selama t0-t1 :
SOT GOT
SO
t
t S S
S H
f dt
df
− −
=
−
. 2
0
1 0
(
)
s Hz
984 , 2
16 , 0 . 68 , 2
50
2 12
6 , 1 . 66 , 0 2 2
50
− =
− =
− −
− =
Nilai f : 1
t dt
df f f
t t
∆ × + =
−1 0
0 1
(
)
Hz
70 , 49
1 , 0 984 , 2 50 =
× −
Beban maksimum yang dapat dipikul sistem setelah penurunan frekuensi sebesar f1:
max 0 1
1 B
B S
f f
S =
MVA
162 , 6
2 , 6 50
70 , 49 =
× =
Daya yang dibangkitkan generator setelah penurunan frekuensi sebesar f1:
Besar ∆T setelah penurunan frekuensi sebesar f1:
1 1 1
. 2 f
P
T S
π − = ∆
Hz MW
3
10 076 , 4
70 , 49 14 , 3 2
272 , 1
− × −
=
× × =
Besar momen kelambanan I setelah penurunan frekuensi sebesar f1:
1 0 1 1
. . 2
t t
dt df T I
− ∆ =
π
3 4
3
10 175 , 2
984 , 2 14 , 3 2
10 076 , 4
Hz MW
− −
× =
− ×
× ×
− =
Kecepatan putar generator setelah penurunan frekuensi sebesar f1:
p f
n1 1
. 120 =
so o
S P
f f
P1 = 1 ×
MW
272 , 1
28 , 1 50
70 , 49 =
rpm 1491 4 70 , 49 120 = × =
Energi Kinetik setelah penurunan frekuensi sebesar f1:
1 1 1 2 1 ω × × = I KE
( )
Hz MW 648 , 2 60 1491 14 , 3 4 10 175 , 2 21 4 2 2
= × × × × × = −
Momen inersia setelah penurunan frekuensi sebesar f1:
mach S KE H 1 1 = sekon 655 , 1 6 , 1 648 , 2 = =
Momen inersia sistem setelah penurunan frekuensi sebesar f1:
system mach system S S H
H1 = 1
sekon 275 , 0 9600 1600 655 , 1 = × =
Penurunan frekuensi selama t1-t2 :
(
)
SOT GOT B S GO tt S S
s Hz
794 , 2
10 552 , 1 . 007 , 18
− =
− =
Nilai f : 2
t dt
df f f
t t
∆ × + =
−2 1
1 2
(
)
Hz
42 , 49
1 , 0 794 , 2 70 , 49 =
× −
+ =
Beban maksimum yang dapat dipikul sistem setelah penurunan frekuensi sebesar f2:
max 0 2
2 B
B S
f f
S =
MVA
128 , 6
2 , 6 50
42 , 49 =
× =
Daya yang dibangkitkan setelah penurunan frekuensi sebesar f2:
so o
S P
f f
P = 2 ×
2
MW
265 , 1
28 , 1 50
42 , 49 =
× =
Besar ∆T setelah penurunan frekuensi sebesar f2:
2 2 2
. 2 f
P
T S
π − = ∆
Hz MW
3
10 077 , 4
41 , 49 14 , 3 2
265 , 1
− × −
=
Besar momen kelambanan I setelah penurunan frekuensi sebesar f2:
2 1 2 2
. . 2
t t
dt df T I
− ∆ =
π
3 4
3
10 323 , 2
794 , 2 14 , 3 2
10 077 , 4
Hz MW
− −
× =
− ×
× ×
− =
Kecepatan putar generator setelah penurunan frekuensi sebesar f2:
p f
n 2
2
. 120 =
rpm
6 , 1482
4 42 , 49 120 =
× =
Energi Kinetik setelah penurunan frekuensi sebesar f2:
2 2 2
2 1
ω × ×
= I
KE
( )
Hz MW
796 , 2
60 6 , 1482 14
, 3 4 10 323 , 2 2
1 4 2 2
=
× ×
× × ×
= −
Momen inersia setelah penurunan frekuensi sebesar f2:
mach S
KE
H 2
2 =
sekon
74 , 1
6 , 1
796 , 2
= =
system mach system S S H
H2 = 2
sekon 291 , 0 9600 1600 74 , 1 = × =
Penurunan frekuensi selama t2-t3 :
(
)
SOT GOT B S GO tt S S
S S S H f dt df − − − = − 2 2 2 . 2 3 2
Nilai f : 3
t dt df f f t t ∆ × + = −3 2 2 3
(
)
Hz 159 , 49 1 , 0 605 , 2 42 , 49 = + − × =Beban maksimum yang dapat dipikul sistem setelah penurunan frekuensi sebesar f3:
max 0 3 3 B B S f f S = MVA 095 , 6 2 , 6 50 159 , 49 = × =
Daya yang dibangkitkan setelah penurunan frekuensi sebesar f3:
0 3
3 S
o
S P
f f
P = ×
MW
258 , 1
28 , 1 50
159 , 49 =
× =
Besar ∆T setelah penurunan frekuensi sebesar f3:
3 3 3
. 2 f
P
T S
π − = ∆
Hz MW
3
10 0764 , 4
159 , 49 14 , 3 2
258 , 1
− × −
=
× × =
Besar momen kelambanan I setelah penurunan frekuensi sebesar f3:
3 2 3 3
. . 2
t t
dt df T I
− ∆ =
π
3 4
3
10 4917 , 2
605 , 2 14 , 3 2
10 076 , 4
Hz MW
− −
× =
− ×
× ×
− =
Kecepatan putar generator setelah penurunan frekuensi sebesar f3:
p f
n 3
3
. 120 =
rpm
7 , 1474
4 159 , 49 120 =
× =
Energi K