PENGENDALIAN BAN BERJALAN PADA APLIKASI
PENGISIAN BOTOL BERBASIS
MIKROKOMPUTER
Oleh :
Drs. Bisman Perangin-angin, M. Eng.Sc NIP : 19560918 198503 1 002
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN
ALAM
UNIVERSITAS SUMATERA UTARA
MEDAN
HALAMAN PENGESAHAN
Judul Penelitian :
PENGENDALIAN BAN BERJALAN PADA APLIKASI
PENGISIAN BOTOL BERBASIS MIKROKOMPUTER
Medan, Mei 2008
Dikatahui Oleh :
Dekan FMIPA- USU
KATA PENGANTAR
Dengan mengucapkan puji dan syukur kehadirat Tuhan Yang Maha Esa, kegiatan penulisan makalah ilmiah ini dapat diselesaikan dengan baik. Untuk itu saya juga mengucapkan banyak terimakasih kepada seluruh pendukung serta fasilitas yang diberikan baik laboratorium maupun referensi yang banyak mendukung dalam penulisan makalah ilmiah ini.
Ucapan terima kasih juga saya ucapkan kepada seluruh staf pengajar FMIPA-USU yang telah berkenan memberikan informasi pengetahuan untuk mendukung penulisan makalah ini.
Kami menyadari masih banyak kelemahan dan kekurangan dalam makalah ilmiah ini, untuk itu kami mengharapkan saran dari pembaca agar penulisan makalah ini dapat ditingkatkan pada hari yang akan dating.
Akhir kata dengan penulisan makalah ini diharapkan dapat menghasilkan suatu manfaat untuk meningkatkan ilmu pengetahuan dan teknologi di USU khususnya dan di Indonesia pada umumnya.
Medan, Mei 2008
Penulis
( Drs. Bisman P, M. Eng. Sc )
Daftar Isi
Pengesahan ... i
Kata Pengantar ... ii
Daftar Isi ...iii
Inti Sari...iv
I. PENDAHULUAN ... 1
II. DASAR TEORI ... 2
II.1. Pewaktu 555 sebagai multivibrator Astabil ... 2
II.2. Sensor Cahaya Phototransistor ... 4
II.3. Motor Stepper (Motor Langkah) ... 5
II.4. Pengendalian Putaran Motor Stepper ... 7
II.5. Pemicu Schmitt / Schmitt Trigger ... 8
II.6. Komporator 8-bit IC 74LS688 ... 9
II.7. Interface PPI 8255 ...11
II.7.1. Diagram Blok Internal PPI 8255 ...11
II.7.2. Mode Operasi dan Inisialisasi ...13
II.7.3. Kata Kendali (Control Word) 8255 ...15
II.7.4. Pengalamatan PPI ...16
II.8. Slot Ekspansi IBM PC ...18
III. METODE PENELITIAN ...20
III.1. Diagram Blok Penelitian ...20
III.1.1. Perangkat Lunak (Software) ...21
III.2. Metode Pengambilan Data ...25
IV. HASIL DAN PEMBAHASAN ...27
V. KESIMPULAN DAN SARAN ...29
Inti Sari
I. PENDAHULUAN
Komputer pribadi (personal computer) dewasa ini perkembangannya sudah cukup cepat dengan kemampuan yang semakin bertambah. Disamping itu harga di pasaran juga sudah semakin terjangkau sehingga dewasa ini komputer pribadi sudah bukan merupakan barang mewah lagi. Pemanfaatan komputer pribadi dalam bidang pengendalian perangkat keras masih sedikit digunakan, padahal komputer pribadi mempunyai kemampuan dalam bidang ini.
Teknik antar muka sebagai metode untuk menghubungkan perangkat luar dengan suatu sistem komputer juga sudah banyak dikenal. Dengan metode ini maka pengendalian sistem pengisian botol secara otomatis dengan menggunakan komputer pribadi (personal computer) juga dimungkinkan.
II. DASAR TEORI
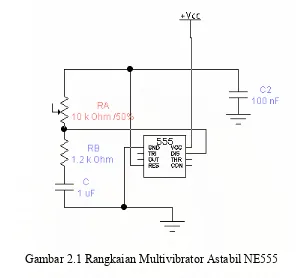
II.1. Pewaktu 555 sebagai multivibrator Astabil
Gambar 2.1 menunjukkan skema rangkaian dari IC NE555 sebagai multivibrator astabil.
Gambar 2.1 Rangkaian Multivibrator Astabil NE555
Prinsip kerja 555 sebagai astabil adalah berdasarkan pengisian dan pengosongan kapasitor. Pengisian kapoasitor terjadi melalui kedua resistor yaitu R1 dan R2. Batas terendah dari tegangan kapasitor yaitu 1/3 Vcc, sedangkan batas teratas dari tegangan kapasitor ini adalah 1/3 Vcc sampai Vcc dan pada T1 tegangannya sama dengan 2/3 Vcc, sehingga :
2/3 Vcc = (Vcc-1/3 Vcc)(1-e- 1(R1+R2)C1) + 1/3 Vcc ……… (2.1)
Dengan hilangnya Vcc maka diperoleh bahwa waktunya tergantung dari tegangan sumber yakni :
Demikian pula ketika outputnya rendah kapasitor akan mengosongkan muatan mulai dari 2/3 Vcc pada saat T2 nantinya. Konstanta waktu sekarang adalah R2C atau dengan kata lain operasi kerjanya sama dengan pengisian. Waktu T2 adalah :
T2 = R2.C.ln2……… (2.4)
T2=0,693.R2.C……… (2.5)
Kemudian perioda dari gelombang ouput segi empat (square wave) merupakan penjumlahan T1 dan T2.
Sedangkan Duty cycle-nya merupakan perbandingan antara waktu dalam keadaan tinggi dengan perioda dan dinyatakan dengan rumus :
Duty cycle =
Sinyal yang dihasilkan oleh rangkaian diatas berupa sinyal pulsa yang memiliki duty cycle yaitu persentase lebar pulsa pada saat tinggi (berlogika “1”) terhadap satu periode sinyal. Besarnya duty cycle dari rangkaian diatas dapat dihitung dengan rumus :
II. 2. Sensor Cahaya Phototransistor.
Ketika cahaya dengan frekuensi diatas frekuensi ambang suatu bahan semikonduktor transistor pada daerah basisnya, maka terbentuklah pasangan elektron dan hole (lubang) sehingga menyebabkan arus seolah-olah mengalir masuk kedalam basis.
Besarnya arus ini bergantung kepada besarnya intensitas cahaya yang diberikan kepadanya. Daerah utama dari terbentuknya arus ini adalah daerah persambungan kolektor dan basis.
IC = hFE.IB + (1+hFE)ICBO………
Umumnya sensitifitas suatu phototransistor tidak besar. Ini dikarenakan perbedaan intensitas cahaya, yang dalam hal ini berupa arus IP tidak menghasilkan pembesaran yang cukup pada keluarannya. Hal ini mengakibatkan banyak rangkaian menggunakan phototransistor digandeng dengan transistor penguat yang lain secara kaskade, sehingga penguatan yang dihasilkan menjadi lebih besar. Selain itu untuk menghasilkan penguatan arus yang lebih besar, phototransistor dapat digandengkan secara darlington yang disebut dengan photodarlington seperti ditunjukkan pada gambar 2.2 berikut ini :
VCC
Vo
(a) (b)
II.3. Motor Stepper (Motor Langkah)
Motor stepper banyak digunakan dalam berbagai aplikasi, dipergunakan apabila dikehendaki jumlah putaran yang tepat atau diperlukan sebagian dari putaran motor. Suatu contoh dapat dijumpai pada disk drive, untuk proses pembacaan atau penulisan data dari atau ke cakram (disk), head baca–tulis ditempatkan pada tempat yang tepat diatas jalur atau track pada cakram, untuk itu
head tersebut dihubungkan dengan sebuah motor stepper.
Aplikasi penggunaan motor stepper dapat dijumpai dalam bidang industri atau untuk jenis motor stepper kecil dapat dgunakan dalam perancangan suatu alatb mekatronik atau robot. Motor stepper berukuran besar digunakan misalnya dalam proses pengoboran logam yang mengkehendaki ketepatan posisi pengeboran, dalam hal ini dilakukan oleh sebuah robot yang memerlukan ketepatan posisi dalam gerakan lengannya dan lain-lain.
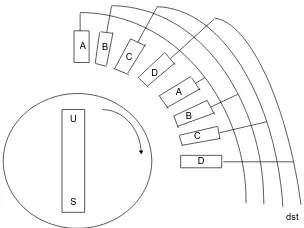
Motor stepper (motor langkah) merupakan salah satu jenis motor yang dirancang berputar sebesar berapa derajat untuk setiap pulsa listrik yang diterima oleh bagian pengaturnya. Motor stepper dipergunakan dalam sistem pengaturan digital, dimana motor menerima sebuah deretan pulsa untuk memutar bagian motor.
Gambar 2.3 Diagram Motor Langkah
Jenis motor stepper yang sering digunakan adalah motor stepper magnet permanen. Motor stepper jenis ini menggunakan bahan rotor yang terbuat dari bahan magnet permanen. Bentuk dasar motor stepper ini cukup sederhana, yang terdiri dari rotor (magnet permanen) dan stator yang dililiti kumparan sehingga dapat membentuk magnet listrik.
Jika stator diberi arus listrik maka sisi-sisi stator akan membentuk kutub-kutub magnet. Jika kutub-kutub magnet stator yang terbentuk sama dengan kutub-kutub magnet rotor maka akan terjadi gaya tolak menolak sehingga mengakibatkan poros akan berputar, dimana arah putaran dapat terjadi pada dua arah. Symbol motor stepper ditunjukkan pada gambar 2.6 .
Gambar2.3 Simbol motor Stepper
U
S A
D B
C
D
A
B
C
II. 4.. Pengendalian Putaran Motor Stepper.
Untuk menggerakkan motor stepper dibutuhkan empat buah sinyal masukan berbentuk pulsa yang urutannya mengikuti prosedur tertentu. Urutan pemberian sinyal masukan uintuk menggerakkan motor stepper ditunjukkan pada gambar 2.4 berikut ini.
A
B
C
D
Gambar 2.4 Urutan Pemberian Sinyal Masukan pada Motor Stepper
Jika urutan pemberian pulsa masukan tersebut dibalik, sehingga masukan D yang pertama mendapat logika 1 disusul masukan C dan B. Masukan A mendapat logika 1 pada urutan terakhir maka arah putaran rotor akan berlawanan dengan arah putaran sebelumnya.
II.5. Pemicu Schmitt / Schmitt Trigger
Schmitt trigger (pemicu schmitt) merupakan suatu perangkat yang digunakan untuk menghasilkan bentuk gelombang persegi (pulsa). Schmitt trigger
sering digunakan sebagai detektor puncak. Gambar berikut merupakan diagram yang mengilustrasikan operasi dasar dari schmitt trigger. Schmitt trigger menerima masukan gelombang sinus, maka bentuk keluarannya adalah pulsa segi empat. Lebar pulsa keluaran lebih kecil dari setengah panjang gelombang T terhadap masukan gelombang sinus.
Schmitt trigger dapat mengubah tegangan masukan dengan perubahan yang sangat lambat ke dalam keluaran yang berubah tajam bentuk gelombangnya (hampir tidak kontinu) dan timbul tepat pada harga tertentu dari tegangan masukan.
< T/2
T/2
T
Schmitt
Trigger Output Input
Gambar 2.5 Diagram Operasi Dasar Schmitt Trigger
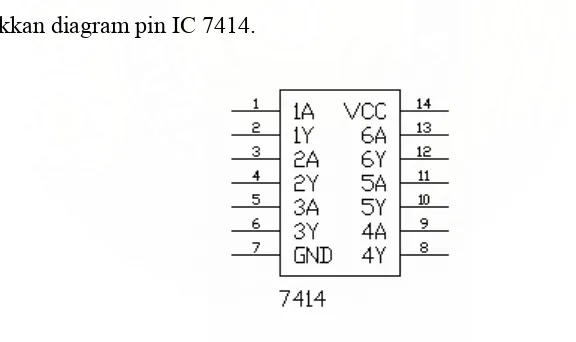
IC 7414 merupakan salah contoh IC gerbang NOT schmitt trigger. Dalam tiap kemasannya terdapat 6 buah gerbang NOT schmitt trigger. Gambar 2.6 menunjukkan diagram pin IC 7414.
Gambar 2.6 Diagram Pin IC7414
II.6. Komporator 8-bit IC 74LS688
dikendalikan lagi oleh sebuah masukan G yang aktif rendah. Gambar 2.7 menunjukkan diagram pin dan skema masukan keluaran bagi IC 74LS688.
2
Gambar 2.7 Diagram Pin IC 74LS688
Sedangkan tabel kebenaran IC 74LS688 ditunjukkan pada tabel 2.3. Tabel 2.3 Tabel Kebenaran IC 74LS688
INPUT OUPUT
P,Q G P = Q
P = Q L L
P > Q L H
P < Q L H
II.7. Interface PPI 8255
PPI 8255 merupakan antarmuka (interface) yang dikemas dalam bentuk chip yang dirancang untuk berbagai keperluan pada sistem mikrokomputer untuk dapat berkomunikasi dengan perangkat di luar komputer.
Ada tiga port 8-bit yang disediakan (A, B dan C) dan dapat diprogram untuk dioperasikan masing-masing ataupun gabungan. Ketiga port ini dibagi menjadi dua grup dan dapat digunakan dalam tiga jenis mode pengoperasian.
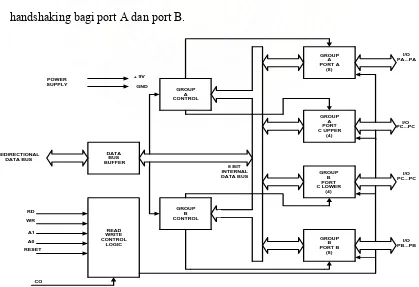
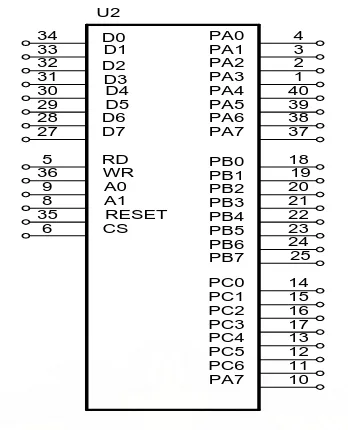
II.7.1. Diagram Blok Internal PPI 8255
Gambar 2.8. menunjukkan diagram blok internal dari PPI 8255. Pada sisi sebelah kanan terlihat ke – 24 jalur I/O 3-port seperti yang disebutkan di atas.
Port A dapat digunakan sebagai port masukan 8 bit atau sebagai port keluaran 8 bit. Seperti halnya dengan port A, port B juga dapat digunakan sebagai port masukan 8 bit atau port keluaran 8 bit, Port C dapat digunakan sebagai port masukan ataupun keluaran 8-bit, sebagai dua port 4 bit, atau menghasilkan sinyal handshaking bagi port A dan port B.
Gambar 2.8. Diagram Blok Internal dan Konfigurasi Pin 8255.
Pada sisi sebelah kanan terlihat adanya jalur-jalur sinyal untuk dihubungkan ke perangkat dan bus system. Jalur data digunakan untuk menuliskan byte atau register kendali ke port yang dituju, membaca data byte atau register status dari port dibawah kendali jalur RD dan WR. Jalur masukan alamat A0 dan A1 digunakan untuk memilih akses ke salah satu port atau ke register kontrol.
Pengalamatan internal untuk 8255 adalah 00 untuk port A, 01 untuk port B, 10 untuk port C, dan 11 untuk kontrol. Masukan sinyal rendah pada CS akan menyebabkan 8255 dapat mengakses penulisan maupun membaca data. Masukan CS ini dihubungkan pada keluaran sebuah rangkaian decoder alamat untuk memilih perangkat melalui pengalamatan dari mikrokomputer.
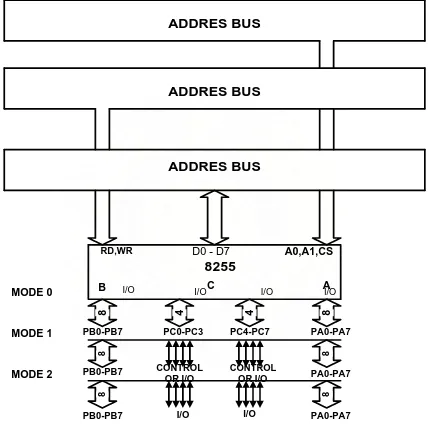
II.7.2. Mode Operasi dan Inisialisasi
Gambar 2.9. memperlihatkan mode pengoperasian 8255 dan inisialisasi yang dapat dilakukan untuk masing-masing port.
8
8
8
8
8 4 4 8
ADDRES BUS
ADDRES BUS
ADDRES BUS
8255
RD,WR D0 - D7 A0,A1,CS
B I/O I/OC I/O AI/O
PB0-PB7
PB0-PB7
PB0-PB7
PA0-PA7
PA0-PA7
PA0-PA7
PC0-PC3 PC4-PC7
CONTROL OR I/O
CONTROL OR I/O
I/O I/O
MODE 2 MODE 1 MODE 0
1. Mode 1
Bila ingin menggunakan port A dan port B untuk suatu operasi I/O yang membutuhkan handshaking atau strobed, 8255 dapat diinisialisasi pada mode 1. dalam operasi ini, sebagian kaki port C difungsikan sebagai jalur handshaking. Kaki PC0, PC1 dan PC2 difungsikan sebagai jalur handshaking bagi port B jika diinisialisasikan pada mode 1, kaki PC3, PC4, PC5 difungsikan sebagai sinyal handshaking. Sedangkan kaki PC6 dan PC7 disediakan untuj digunakan sebagai jalur masukan maupun keluaran. Jika port A diinisiallisasikan sebagai keluaran pada mode 1, maka port C kaki PC3, PC6 dan PC7 difungsikan sebagai sinyal handshaking. Port kaki PC4 dan PC5 disediakan untuk sebagai jalur masukan maupun keluaran.
2. Mode 2
II.7.3 Kata Kendali (Control Word) 8255
Gambar 2.10 menujukkan format untuk dua kata kendali bagi 8255A.
GROUP B
PORT C LOWER 1 = INPUT 0 = OUTPUT
PORT B 1 = INPUT 0 = OUTPUT
MODE SELECTION 0 = MODE 0 1 = MODE 1
GROUP A
PORT C UPPER 1 = INPUT
0 = OUTPUT
PORT A 1 = INPUT 0 = OUTPUT
MODE SELECTION 0 = MODE 0 1 = MODE 1
MODE SET FLAG 1 = AKTIF 0 = SET RESET 1X = MODE 2
D6 D5 D4 D3 D2 D1 D0
D7
CONTROL WORD
Untuk menginisialisasikan sebuah PPI 8255, cukup dengan mengirimkan kata kendali yang tepat sesuai dengan format yang diberikan diatas. Sebagai contoh, untuk menginisialisasi 8255 dengan kondisi sebagai berikut :
• Port A sebagai masukan
• Port B sebagai masukan
• Port C sebagai keluaran
• Mode operasi bagi port A dan port B adalah mode 0
Format kata kendali untuk keadaan ini adalah 10010010B dalam bilangan biner. Format biner tersebut diubah menjadi bilangan heksadesimal yakni 90H. Langkah selanjutnya adalah dengan mengirimkan kata 90H kealamat register kendali 8255.
II.7.4 Pengalamatan PPI
Pada sistem mikrokomputer IBM PC terdapat dua jenis alamat yaitu alamat memori dan alamat masukan-keluaran (I/O). Alamat I/O inilah yang dipergunakan bagi perangkat- perangkat eksternal untuk dapat diakses melalui komputer. IBM PC mengeluarkan suatu standar alamat yang berlaku bagi sebagiam besar sistem IBM PC baik XT maupun AT.
Tabel 2.4 Alamat I/O untuk Sistem Mikrokomputer IBM PC
No Port IBM PC XT IBM PC AT
000H-00FH DMA controller DMA controller 010H-01FH Undocumented Reserved
000H-02FH Interrupt controller Interrupt controller 1 000H-03FH Undocumented Interrupt controller 1
000H-05FH Timer Timer
000H-06FH Keyboard Keyboard
000H-07FH Undocumented RCT, NMI Mask 000H-09FH DMA page registers DMA Page Register 0A0H-0AFH NMI mask registers Interrupt controller 2 0B0H-0BFH Undocumented Interrupt controller 2 0C0H-0CFH Reversed DMA controller 2 0D0H-0DFH Undocumented DMA controller 2
0E0H-0EFH Reversed Reserved
100H-1EFH Undocumented Math coprocessor
0E0H-0EFH Undocumented Available for I/O channel 1F0H-1FFH Undocumented Fixed disk
200H-20FH Game I/O adapter Game I/O adapter 210H-21FH Expansion adapter Reserved
220H-24FH Reserved Available for I/O channel 250H-26FH Undocumented Available for I/O channel 270H-27FH Parallel printer 2 Parallel printer 2
280H-2AFH Undocumented Available for I/O channel 2B0H-2DFH Altarnate EGA Altarnate EGA
2E0H-2EFH Undocumented GPIB0, data acquisition 0 2F0H-2FFH Secondary adapter Serial port 2
300H-31FH Prototype card Prototype card
320H-32FH Fixed disk adapter Available for I/O channel 330H-35FH Undocumented Available for I/O channel 360H-36FH Undocumented PC network
370H-37FH Parallel printer Parallel printer 1 380H-38FH Second bisyn controller Second bisyn controller 390H-39FH Undocumented Cluster adapter
3A0H-3AFH First bisyn controller First bisyn controller 3B0H-3BFH Monochrome display Monochrome display 3C0H-3CFH EGA adapter EGA adapter
3D0H-3DFH CGA CGA
II.8. Slot Ekspansi IBM PC
Perangkat sistem minimum mikrokomputer IBM PC atau kompatibelnya seperti mikroprosesor, prosesor bantu (co-prosesor), ROM, RAM dan sebagainya dirakit pada sebuah papan rangkaian yang disebut motherboard. Untuk perangkat tambahan umumnya dipasang pada suatu slot yang dinamakan Expansion Slot atau slot ekspansi.
Beberapa contoh dari sistem yang menggunakan slot ekspansi ini adalah port printer, adapter grafik, perangkat multimedia, dan sebaginya, sehingga aplikasi sistem mikrokomputer IBM PC menjadi luas.
Slot ekspansi ISA pada IBM PC XT memiliki 62 pin yang berupa jalur data, jalur alamat, sinyal clock, sinyal kendali masukan-keluaran, interupsi, dan catu daya. Karena sistem IBM PC XT menggunakan mikroprosesor 8-bit, jalur yang diakses adalah 8-bit. Sedangkan untuk IBM PC AT selain slot ekspansi ISA juga terdapat slot tambahan yang terdiri dari 36 pin. Jalur data yang dapat diakses oleh sistem ini adalah 16 bit dimana jalur data 8-bit tambahan diambil dari slot tambahan diatas.
GND
Gambar 2.11 Konfigurasi pin Slot Ekspansi ISA IBM PC
III. METODE PENELITIAN
III.1. Diagram Blok Penelitian
Sebelum merealisaiskan sistem, perlu dibuat rancangan Diagram blok dari rangkaian simulasi otomatisasi pengisian botol berbasis komputer pribadi (Personal Computer) seperti ditunjukkan pada gambar 3.1.
MOTOR
Gambar 3.1 Diagram Blok Penelitian
keperluan ini adalah transistor foto (phototransistor). Pada penelitian ini digunakan tiga buah sensor inframerah yaitu :
Sensor 1 (sensor posisi awal), diletakkan diawal landasan ban berjalan, berfungsi untuk mendeteksi ada tidaknya botol yang akan diisi.
Sensor 2 (sensor posisi tengah), terletak ditengah ban berjalan tepat di depan lengan pengisi, yang berfungsi untuk mendeteksi apakah botol telah tepat berada pada posisi pengisian.
Sensor 3 (sensor posisi akhir), terletak diakhir landasan ban berjalan dan siap untuk diambil dari tempatnya.
Ketiga sensor ini membutuhkan rangkaian penguat dan filter serta pemicu schmitt (schmitt trigger). Seperti dinyatakan sebelumnya, penguat yang digunakan adalah Op-Amp yang sudah umum digunakan. Selanjutnya keluaran pemicu schmitt diumpankan ke port A dari IC 8255.
III.1.1. Perangkat Lunak (Software)
Bahasa pemograman yang digunakan pada penelitian ini menggunakan bahasa pemograman tingkat tinggi (high level language), karena lebih mudah untuk dipelajari dan digunakan. Dasar pemilihan bahasa pemograman tersebut adalah bahasa pemograman tingkat tinggi lebih mudah dipelajari dan harus dapat mengakses atau berinteraksi dengan perangkat keras (hardware). Pada bahasa Basic atau Quick Basic dikenal perintah IN atau OUT untuk akses ke alamat perangkat keras. Pada bahasa pemograman Turbo Pascal dikenal perintah
Untuk keperluan pada penelitian ini penulis merencanakan menggunakan bahasa pemograman Turbo Pascal.
Perangkat lunak (software) yang digunakan mencakup berbagai fungsi antara lain :Bagian program/prosedur yang mengatur kerja perangkat keras, meliputi pengiriman control word, pembacaan data dari pore masukan (port A) dan pengiriman logika pengendali pada keluaran (port B) dan port C.
Prosedur pengolahan data, meliputi pembacaan data secara berulang-ulang (looping) sesuai kebutuhan, penyusunan logika kendali dan lain-lain.
Bagian tambahan atau pelengkap, seperti pengaturan tampilan menu pilihan, penyusunan data yang telah dibaca pada tampilan (monitor) dan prosedur lainnya.
MULAI
Inisialisasi 8255
port A : IN; port B:OUT;port C:OUT
Tampilkan Menu
Periksa Logika Port A
Port A0 =0?
Aktifkan Motor Stepper 1 berputar ke kiri Aktifkan Motor Stepper 2 berputar ke
kanan
Periksa Logika Port A
Port A1 =0?
Non-aktifkan Motor Stepper 1 dan 2
Kirim 04H ke Port C untuk Mengaktifkan Motor Kompresor
Delay 5 detik (lama pengisian botol)
A
B
Tidak
Ya Ya
Tidak
SELESAI
Kirim 00H ke port C untuk me-nonaktifkan Motor Kompresor
Aktifkan Motor stepper 2 berputar ke kanan hingga posisi awal
Aktifkan Motor Stepper 1 berputar ke kiri
Isi botol lagi ? Periksa Logika Port A
Port A3 =0?
Non-aktifkan Motor Stepper 1
B
A
Tidak
Ya Ya
Tidak
III.2. Metode Pengambilan Data.
Pengujian Rangkaian Pemancar & Penerima
Rangkaian penerima diuji dengan mengukur keluaran dari rangkaian penerima dengan kondisi menghalangi phototransistor dari sinar infra merah agar rangkaian memberikan respon terhadap ada tidaknya cahaya infra merah yang dideteksi pada phototransistor.
Selanjutnya dilakukan pengamatan pada keluaran dari IC gerbang NOT Schmitt trigger. Bila masukan mendekati atau sama dengan nol (0) maka pada keluaran akan berlogika 1 (5 volt). Sedangkan bila tegangan masukan pada IC (sekitar 3,5 volt atau lebih), maka pada keluaran harus berlogika 0 (mendekati 0 volt).
Rangkaian Penerima
Rangkaian penerima menggunakan phototransistor untuk mendeteksi sinar infra merah yang dipancarkan rangkaian pemancar. Pada saat phototransistor tidak disinari sinar infra merah (dalam hal ini terhalang oleh botol) maka tidak ada arus basis pada phototransistor, sehingga pada saat tersebut phototransistor dalam keadaan off. Nilai tahanan antara kolektor dan emitor sangat besar.
Sedangkan pada saat ada sinar infra merah yang mengenai phototransistor
Dengan harga penguatan sinyal sebesar 1000 kali tersebut diharapkan nantinya sinyal sudah cukup kuat amplitudanya untuk diumpankan ke rangkaian selanjutnya sehingga informasi pada sinyal tersebut tidak hilang.
Seperti disebutkan sebelumnya bahwa dengan adanya sinar infra merah yang diterima phototransistor maka resistansi antara kolektor dan emitor juga berubah-ubah sesuai dengan frekuensi infra merah yang diterimanya, sehingga tegangan yang dihasilkan juga berubah-ubah. Sinyal ini kemudian diperkuat oleh
Op-Amp dan selanjutnya disearahkan oleh dioda (D2) dan kapasitor (C3) untuk mendapatkan sinyal DC. Sinyal DC ini selanjutnya diumpankan ke basis transistor. Saat botol tidak menghalangi sinar infra merah maka transistor Q1 akan bekerja (saturasi). Pada saat ini masukan gerbang NOT menjadi rendah dan dengan demikian nilai logika keluaran gerbang NOT menjadi tinggi (1).
IV. HASIL DAN PEMBAHASAN
Dari harga-harga komponen – komponen pada rangkaian pemancar infra merah maka besarnya frekuensi (pulsa) keluaran dari rangkaian secara teori dihitung dengan persamaan:
f =
dan harga duty cycle keluaran adalah :
Duty cycle =
Tabel berikut ini menunjukkan data hasil pengukuran pada rangkaian pemancar: Tabel 4.1. Tabel Pengukuran Pada Rangkaian Pemancar
Teoritis Hasil Pengukuran
Vcc (V)
Frekuensi (Hz) Duty Cycle (%) Frekuensi (Hz) Duty Cycle (%)
Resistor 10 KΩ pada masukan positip Op-Amp pada rangkaian penerima infra merah berfungsi untuk memberikan tegangan referensi pada Op-Amp yang besarnya adalah:
Vref = xVcc
Sedangkan besarnya penguatan sinyal yang terjadi pada keluaran Op-Amp
dapat dihitung sebagai berikut:
Av =
Dari data yang diperoleh pada label stepper motor diketahui bahwa besarnya perputaran motor tiap step adalah : 7,5 o/langkah.
Dengan demikian untuk mencapai satu putaran penuh maka dibutuhkan :
V. KESIMPULAN DAN SARAN
V.1. Kesimpulan
Dari hasil pelaksanaan perancangan alat pada penelitian hingga pengujian dan analisa data maka penulis dapat menarik beberapa kesimpulan, antara lain:
1. Perancangan sistem pengisian botol dapat direalisasikan dengan memanfaatkan teknologi sinar infra merah dan komputer pribadi (Personal Computer, PC) sebagai pusat pemrosesan dan pengendalian.
2. Mikrokomputer dalam hal ini personal computer (PC) berinteraksi atau berkomunikasi dengan perangkat luar dengan menggunakan interface PPI 8255. IC ini sudah memadai untuk digunakan sebagai interfacing atau antar muka sistem komputer dengan unit lainnya dengan menggunakan sistem komunikasi data parelel.
V.2. Saran
DAFTAR PUSTAKA
Bernard Grob, Prinsip-Prinsip Elektronika, Terjemahan Pakpahan, Sahat, Penerbit Erlangga, 1991.
Coughlin D. Robert, Driscoll F. Frederick, 1991. Penguat Operasional dan Rangkaian Terpadu Linier, Edisi Kedua, Jakarta, Erlangga.
Eko Putra, Agfianto, 2002, Teknik Antarmuka Komputer : Konsep dan Aplikasi, Yogyakarta : Graha Ilmu.
Gottfried Biro S., Programming With Pascal, Schaum’s Outline Series.
Hall, Doughlas, V., Microprocessor and Interfacing, Programming and Hardware, Mc. Graw Hill Inc., New York. 1983.
Link, Wolfgang, Pengukuran, Pengendalian dan Pengaturan PC, PT. Elex Media Komputindo, Jakarta, 1993.
Wasito, Data Sheet Book 1, Elex Media Komputindo, Jakarta, 1994.
Zack, Rodnay, Wirawan, Kusuma, Pengantar Pascal: Termasuk Turbo Pascal,