PENGENDALI GERAK KAMERA MENGGUNAKAN
FREKUENSI RADIO
TUGAS AKHIR
Disusun untuk memenuhi syarat kelulusan
Pada Program Studi Sistem Komputer Strata Satu di Jurusan Teknik Komputer
Oleh :
Andri Hermawan
10204094
Pembimbing :
Dr.Ir.Yeffry Handoko Putra, M.T Selvia Lorena Br Ginting, M.T
JURUSAN TEKNIK KOMPUTER
FAKULTAS TEKNIK DAN ILMU KOMPUTER
UNIVERSITAS KOMPUTER INDONESIA
iv
ABSTRAK
Perkembangan dan pemanfaatan teknologi nirkabel atau wireless pada
sistem komunikasi pada masa sekarang ini sudah sering dijumpai, pemanfaatan
teknologi wireless pada pengendali gerak kamera pada motor servo. Pada sistem
ini bertujuan untuk mempermudah pengendalian secara jarak jauh tanpa harus
menggunakan kabel pada media komunikasi datanya. Secara garis besar
perancangan sistem ini terbagi menjadi dua bagian yaitu, bagian pengirim dan
bagian penerima. Proses perekaman video atau gambar pada sistem kamera,
sistem wireless pada bagian pengirim digunakan TLP434 dan pada sistem
penerima menggunakan RLP434 dan sistem mikrokontroler digunakan AT89C51,
sedangkan interface atau antarmuka sebagai penghubung antara sistem pengirim
dan komputer digunakan RS232 dimana rangkaian ini berfungsi untuk mengubah
level tegangan yang dikirim oleh komputer melalui com serial berupa data ASCII
akan dirubah menjadi level tegangan TTL (transistor – transistor logic) sehingga
dapat di pancarkan oleh TLP434, alat dan sistem yang dibuat ini menghasilkan
pergerakan kamera melalui motor servo baik secara navigasi atau secara derajat,
selain itu proses perekaman dan pengambilan gambar dapat dilakukan oleh sistem
ini.
v
ABSTRACT
The development and utilization of wireless technology or wireless communications system in the present have often encountered, the use of wireless technology in motion control camera on a servo motor. In this system aims to facilitate remote control without having to use the cable for data communication medium. Broadly speaking, the design of the system is divided into two parts, namely, the Transmiter and receiver. The process of recording video or pictures on the camera system, wireless system used on the sender and the receiver system TLP434, RLP434 and systems using AT89C51 microcontroller, while the interface as a liaison between the sender and the computer system used RS232 circuit which serves to change the voltage level sent by the computer through a serial com ASCII data will be converted into TTL voltage levels (transistor - transistor logic) that can be broadcast by the TLP434, tools and systems that made this result movement of the camera via a servo motor either navigation or degree, except that the process recording and shooting can be done by this system.
vi
KATA PENGANTAR
Assalamualaikum Wr, Wb.
Segala puji dan syukur kehadirat Allah SWT, yang telah memberikan
karunia dan hidayah-Nya kepada penulis sehingga dapat menyelesaikan tugas
akhir dengan judul : “Pengendali Gerak Kamera Menggunakan Frekuensi Radio”. Tugas akhir ini disusun untuk memenuhi syarat dalam meraih gelar kesarjanaan pada Jurusan Teknik Komputer Fakultas Teknik dan Ilmu Komputer
di Universitas Komputer Indonesia.
Segala usaha tersebut tidak akan berhasil tanpa dorongan serta
bimbingan dari semua pihak terutama dari pihak keluarga, dosen pembimbing dan
rekan-rekan mahasiswa, sehingga penyusun dapat menyelesaikan tugas akhir ini.
Oleh karena itu, perkenankan penyusun mengucapkan terima kasih dan
penghargaan yang sebesar-besarnya kepada:
1. Sri Nurhayati, M.T. Selaku Ketua Jurusan Teknik Komputer.
2. Dr.Ir.Yeffry Handoko Putra, M.T. Selaku Dosen Pembimbing I yang telah
meluangkan waktu dan tenaga untuk memberikan bimbingan dan masukan
yang sangat berharga bagi terselesaikannya tugas akhir ini.
3. Selvia Lorena Br Ginting, M.T. Selaku Dosen Pembimbing II yang telah
memberikan banyak waktu dan inspirasi selama proses bimbingan.
4. Usep Mohamad Ishaq, M.Si. Selaku dosen wali kelas 04 TK-2.
5. Ayahanda Rino Slamet dan Ibunda Sri Suryani, S.Pd yang telah mencintai,
menyayangi, membesarkan, mendidik penulis dengan penuh kesabaran dan
keikhlasan.
6. Bapak dan Ibu Dosen Jurusan Teknik Komputer.
7. Jajaran Staf Jurusan Teknik Komputer.
8. Kakakku Tercinta Yanti Purnamasari, Fedrik Nabhan, Rahmat, Terimakasih
atas kasih sayang, nasehat, motivasi dan doanya yang selama ini diberikan
vii
9. Fitria Susianti yang selalu mensuport dan memberikan semangat, kasih
sayang, nasehat, motivasi dan doa yang selama ini diberikan kepada penulis.
10. Teman-teman 04TK-2: Yuddhy Setiyadi, Sofwan Fauzi, Dandan Hasdiana,
Toni S Permana, Jupry, Giri M Gentara, Andi yang telah memberikan
dorongan secara moril dan materil kepada penulis..
11. Teman-teman Kampus : Sony, Juhri, Taupik Oktoreza, Tony koben, Andri,
Haris, Mazkie, Ebek, Andriana, Iqbal, Gugun, Ahmad Tohirin.
12. Teman-teman Terbaikku: Wanda, Suparna, Ami Akhmaludin, Dwi Jayanto,
Jajang, Yuddy, Cici, Entang. Terimakasih atas suport, motivasi dan
kebersamaannya dari sejak SMA sampai sekarang, kalian semua adalah teman
terbaikku.
13. Semua pihak yang tidak bisa disebutkan satu persatu. Mohon maaf dan terima
kasih sebanyak-banyaknya.
Penulis menyadari bahwa masih terdapat kekurangan di dalam tugas
akhir ini. Oleh karena itu, penulis mengharapkan saran dan kritik yang bersifat
membangun dan semoga tugas akhir ini bermanfaat dalam pengembangan
wawasan ilmu pengetahuan bagi pembaca pada umumnya dan penulis pada
khususnya.
Kesempurnaan hanya milik Allah SWT, dan penulis hanyalah manusia
biasa yang tak luput dari salah dan dosa. Semoga apa yang disampaikan
bermanfaat bagi semua pihak.
Wassalamualaikum Wr, Wb.
Bandung, Agustus 2011
1
BAB I
PENDAHULUAN
1.1. Latar Belakang Masalah
Perkembangan teknologi dan komunikasi yang sangat cepat membuat
manusia mencoba sesuatu hal yang dianggap baru, terutama dibidang peralatan
komputer yang perkembangannya begitu cepat, dimana peralatan tersebut dapat
mempermudah aktifitas dan keperluan manusia yang semakin komplek. Suatu
sistem pengendali bisa melakukan proses lebih efektif, efisien dan bisa
dipergunakan untuk sistem keamanan juga. Pada perangkat komputer tersebut bisa
memanfaatkan port serial yang jarang digunakan untuk bisa dimanfaatkan
sebagai sistem kendali suatu alat.
Motor listrik merupakan alat yang sangat banyak penggunaannya.
Berbagai jenis motor yang ada digunakan untuk membantu dan memudahkan
banyak pekerjaan. Motor servo merupakan salah satu jenis motor listrik. Motor ini
merupakan jenis motor yang relatif mudah dalam penggunaan dan pemeliharaan
sehingga telah begitu banyak digunakan mulai dari sistem audio, hingga sistem
pendukung keamanan.
Ketersediaan dan kemudahan penggunaan motor servo inilah yang
mendorong penulis untuk menggunakannya sebagai suatu alat yang digunakan
bersama komputer, untuk membantu melakukan pengamatan lokasi-lokasi yang
cukup sulit dijangkau. Dengan menggunakan modul TLP434 dan RLP434,
mikrokontroler, sebuah kamera kecil dan sebuah komputer, dapat dibuat suatu
model sistem pengamatan lokasi.
1.2. Rumusan Masalah
Permasalahan yang akan dibahas pada tugas akhir ini adalah :
Bagaimana merancang suatu Pengendali Gerak Kamera Menggunakan
2
1.3. Maksud dan Tujuan
1.3.1 Maksud
Maksud dari pembuatan tugas akhir ini adalah membuat suatu Pengendali
Gerak Kamera Menggunakan Frekuensi Radio.
1.3.2 Tujuan
Tujuan Penelitian adalah:
1. Mengirimkan data dari komputer berupa data ASCII melalui modul TLP
434 sehingga dapat terkirim dan diterima oleh RLP434.
2. Menggunakan port serial pada komputer untuk mengirimkan data ASCII
yang dikirimkan oleh TLP434 dan dapat diterima oleh RLP434.
3. Mengendalikan pergerakan motor servo agar kamera dapat menentukan
posisi yang diinginkan.
1.4. Batasan Masalah
Dalam penyusunan tugas akhir ini penulis memberikan batasan masalah
agar dalam penjelasan nanti akan lebih mudah, terarah dan sesuai dengan yang
diharapkan. Adapun batasan masalahnya yaitu :
1. Penggunaan modul TLP 434 dan RLP 434 sebagai komunikasi data
melalui frekuensi radio dengan menggunakan modulasi ASK
(Amplitudo shift keying).
2. Alat ini menggunakan dua buah motor servo dengan rotasi 180 derajat
dan delapan buah led sebagai indikator komunikasi data.
3. Sistem komunikasi data frekuensi bekerja pada frekuensi 315 Mhz.
4. Pengendalian derajat navigasi motor servo adalah sebesar kelipatan
lima derajat sampai Sembilan puluh derajat untuk pergerakan ke atas,
bawah, kiri dan kanan.
1.5. Metodologi Penelitian
3 berikut :
1. Studi Literatur.
Merupakan suatu langkah yang dilakukan untuk mencari lebih banyak
informasi dari berbagai sumber referensi seperti buku, jurnal, makalah,
artikel, internet, dan lain sebagainya. Hal ini dilakukan untuk memperkuat
dasar teori dalam melakukan perancangan dan realisasi sistem.
2. Diskusi.
Melakukan tanya jawab/diskusi secara langsung dengan pembimbing,
dosen maupun mahasiswa yang mengetahui masalah yang sedang dibahas.
Dan kepada orang-orang yang menguasai pada bidang ini supaya diperoleh
penjelasan yang lebih rinci.
3. Perancangan dan realisasi perangkat keras dan perangkat lunak.
Membuat sistem serta program identifikasi posisi benda berdasarkan
observasi yang dilakukan.
4. Pengujian sistem.
Pengujian sistem dilakukan sesudah sistem ini dirancang dan
direalisasikan. Hal ini bertujuan untuk melihat dan mengetahui kinerja
sistem tersebut apakah sistem berjalan dengan baik atau tidak.
5. Analisa
Proses analisa dilakukan untuk mengetahui apakah sistem yang dirancang
ini sesuai dengan landasan teori atau tidak.
1.6. Sistematika Penulisan
4
BAB I PENDAHULUAN
Bab ini berisikan latar belakang masalah, identifikasi masalah, tujuan,
batasan masalah, metodologi penelitian, sistematika penulisan.
BAB II TINJAUAN PUSTAKA
Dalam Bab ini membahas tentang teori yang berhubungan dengan alat
yang dirancang, yaitu mikrokontroler, modul TLP434 dan RLP434, motor
servo, komunikasi serial.
BAB III PERANCANGAN SISTEM
Dalam Bab ini merupakan inti dari penulisan tugas akhir ini, dimana pada
bab ini memaparkan tahap-tahap perancangan alat mulai dari diagram blok
sistem, perancangan hardware, perancangan software,dan pengujian yang
akan dilakukan.
BAB IV PENGUJIAN DAN ANALISA
Dalam Bab ini membahas tentang hasil pengujian dari perancangan
perangkat keras, perangkat lunak dan analisis sistem yang telah dibuat
secara keseluruhan.
BAB V KESIMPULAN DAN SARAN.
Dalam Bab ini berisikan kesimpulan dari perancangan sistem dan
5
BAB II
TINJAUAN PUSTAKA
2.1. Kamera
Webcam adalah sebuah kamera yang bentuknya lebih kecil dari kamera
pada umumnya. Webcam biasanya digunakan untuk mengambil gambar video
secara langsung dari komputer, dan biasanya digunakan untuk chatting.
Pada dasarnya setiap kamera terdiri dari tiga bagian utama yaitu.
1. Lensa mempunyai fungsi untuk memilih bidang pandang tertentu dan
ditangkap oleh optik yang menghasilkan gambar untuk diteruskan ke kamera.
2. Tubuh kamera berisi tabung pengambil gambar, yang berfungsi untuk
merubah gambar optik yang dihasilkan lensa menjadi sinyal elektrik.
3. VCR (Video Casette Recorder) berfungsi sebagai perekam gambar dan suara,
dibeberapa jenis kamera ada yang recorder terpisah dan ada juga yang
menjadi satu bagian dengan tubuh kamera.
Gambar 2.1 Kamera
Pengaturan kamera yang digunakan :
1. Kamera : 803color CMOS
2. Tegangan transmiter : 200 mW
3. Jangkauan kamera : Auto Focus
6
2.2. Komunikasi Data
Kata komunikasi merupakan suatu kata yang dapat diartikan sebagai cara
untuk menyampaikan atau menyebar luaskan data dan informasi, sedangkan kata
informasi berarti berita, pikiran, pendapat dalam berbagai bentuk. Manusia dapat
melakukan komunikasi dengan berbagai cara, berbicara secara langsung, berbisik,
mengirim surat dan lain sebagainya. Dengan teknologi komunikasi sekarang ini,
hanya dengan menekan beberapa tombol maka jarak dan waktu untuk melakukan
komunikasi tidak lagi menjadi kendala yang berarti.
Teknologi komunikasi terus dikembangkan dengan tujuan memudahkan
manusia dalam melakukan komunikasi. Para ahli terdorong untuk
mengembangkan teknik komunikasi jarak jauh yang lebih efisien dengan metode
telekomunikasi yang memanfaatkan teknologi elektronika, yang dikenal dengan
istilah komunikasi data.
Komunikasi data merupakan cara mengirimkan data menggunakan sistem
transmisi elektronika dari satu komputer atau dari suatu komputer ke terminal
tertentu. Sedangkan data itu sendiri merupakan sinyal elektromagnetik yang
dibangkitkan oleh sumber data yang dapat ditangkap dan dikirimkan ke terminal
penerima.
Tujuan utama dari komunikasi data adalah untuk menukar informasi
antara dua perantara.
a. Data adalah sebuah gambaran dari kenyataan, konsep atau instruksi dalam
bentuk formal yang sesuai untuk komunikasi, interpretasi atau proses oleh
manusia atau oleh peralatan otomatis.
b. Informasi adalah pengertian yang diperuntukkan bagi data dengan
persetujuan pemakai data tersebut.
Definisi ini dapat menjelaskan tujuan, yaitu data dapat diidentifikasikan,
data dapat digambarkan, data tidak perlu mewakili sesuatu secara fisik, tetapi dari
semuanya itu data dapat dan sebaiknya digunakan untuk menghasilkan informasi.
Hal ini juga berarti bahwa data untuk satu orang akan muncul sebagai informasi
untuk yang lain. Informasi ini terbentuk ketika data ditafsirkan. Pada gambar 2.1
7
frekuens
Gambar 2.2 Diagram Blok Komunikasi Sederhana
Pada gambar 2.6 terdapat beberapa komponen seperti:
a. Transducer: Merupakan sistem yang bertugas mengirimkan informasi,
transducer juga membangkitkan data atau informasi dan menempatkannya
pada media transmisi.
b. Proses: Berfungsi untuk mengubah informasi yang akan dikirim menjadi
bentuk yang sesuai dengan media transmisi yang digunakan.
c. Media Transmisi: merupakan jalur transmisi tunggal atau jaringan transmisi
kompleks yang menghubungkan sistem sumber dengan sistem tujuan. Kadang
sistem transmisi juga disebut sebagai pembawa data yang dikirim. Sistem
transmisi ini bisa kabel, gelombang elektromagnetik atau yang lain.
d. Proses: Berfungsi untuk mengubah informasi pada yang telah diterima dari
pengirim melalui media transmisi. Bagian ini sinyal dari pengirim diterima
dari media transmisi.
e. Transducer: Merupakan sistem yang berfungsi untuk menerima sinyal dari
sistem transmisi dan menggabungkannya ke dalam bentuk tertentu yang dapat
ditangkap oleh sistem tujuan.
2.2.1. Sistem Modulasi
Informasi dapat disalurkan melalui saluran transmisi ke tempat yang jauh
jaraknya dengan mempergunakan gelombang yang berfrekuensi tinggi sebagai
pembawanya. Gelombang pembawa ini disebut sebagai carrier. Proses
penumpangan sinyal informasi ke gelombang pembawa disebut sebagai modulasi.
1. Sistem Modulasi Analog
Gambar 2.3 Gelombang Sinusoidal
Transducer Proses Media Proses
Transmisi
8 Sistem modulasi analog adalah sistem modulasi yang mempergunakan
gelombang pembawanya berbentuk gelombang sinusoidal. Dibedakan atas :
1) Amplitude Modulation ( AM )
Modulasi ini mempergunakan amplitudo sinyal analog untuk membedakan
kedua keadaan sinyal digital, pada AM frekuensi dan phase sinyal tetap,
sedangkan yang berubah adalah amplitudonya. Keadaan high “1” sinyal
digital diwakili oleh tegangan yang besar dibandingkan dengan keadaan
“0” (low) amplitude modulation adalah cara modulasi yang paling mudah, namun mudah pula dipengaruhi oleh keadaan media transmisinya.
2) Frecuency Modulation ( FM )
Modulasi ini menggunakan sinyal analog, untuk membedakan kedua
keadaan sinyal digital. Pada FM, amplitudo dan phase tetap sedangkan
frekuensi berubah.
3) Phase Modulation ( PM )
Modulasi ini mempergunakan perbedaan sudut phase dari sinyal analog
untuk membedakan kedua sinyal digital. Cara modulasi ini amplitudo dan
frekuensi tetap, sedangkan phasenya berubah-ubah. Jenis modulasi ini
untuk mengirimkan jumlah data yang sangat banyak dalam kecepatan
tinggi
2. Sistem Modulasi Pulsa
Sistem modulasi pulsa, adalah sistem modulasi yang mempergunakan
gelombang pembawanya berbentuk gelombang diskrit ( pulsa ). Gelombang pulsa
adalah gelombang hasil pencuplikan gelombang analog yang berbentuk
sinusoidal, sehingga dihasilkan gelombang empat persegi secara berulang-ulang.
Dibedakan atas :
1. Modulasi Amplitudo Pulsa ( Pulse Amplitudo Modulation )
Jenis modulasi ini mengubah amplitudo pulsa gelombang dengan
amplitudo gelombang informasi.
2. Modulasi Lebar Pulsa ( Pulse Width Modulation )
9 3. Modulasi Posisi Pulsa ( Pulse Posision Modulation )
Modulasi terjadi dengan cara mengubah posisi gelombang pembawa
terhadap waktu, sesuai dengan sifat sinyal informasi. Tidak terjadi
perubahan amplitudo dan lebar pulsa .
4. Modulasi Kode Pulsa ( Pulse Code Modulation )
PCM digunakan untuk mengirim informasi dengan menggunakan bilangan
(kode-kode) digital, artinya mengubah sinyal analog ke dalam bentuk
digital.
5. Modulasi Delta ( Delta Modulation )
Delta modulation : bentuk penyaluran informasi melalui pulsa digital.
3. Sistem Modulasi Digital
Sistem modulasi digital adalah sistem modulasi yang mempergunakan
gelombang pembawanya berbentuk digital. Dibedakan atas :
1. Amplitudo Shift Keying ( ASK )
ASK : pengiriman sinyal berdasarkan pergeseran amplitudo. Dalam proses
ini munculnya gelombang tergantung ada / tidaknya sinyal informasi
digital.
2. Frecuency Shift Keying ( FSK )
FSK : Frekuency Shift Keying, pergeseran sinyal melalui pergeseran
frekuensi. Modulasi berjenis ini memungkinkan sebuah gelombang
frekuensi menggeser frekuensi output geombang pembawa.
3. Phase Shift Keying ( PSK )
PSK : metode ini merupakan suatu bentuk fasa yang memungkinkan
fungsi pemodulasi menggeser fasa gelombang termodulasi.
2.2.2. Teori Modulasi ASK (Amplitudo Shift Keying)
ASK (Amplitude Shift Keying) adalah suatu modulasi dimana logika 1
diwakili dengan adanya sinyal dan logika 0 diwakili dengan adanya kondisi tanpa
10
Gambar 2.4 ASK (Amplitude Shift Keying)
Hasil ASK (Amplitude Shift Keying) diwakili oleh perbedaan amplitudo
pada carrier. Dimana satu amplitudo adalah zero, ini menunjukkan kehadiran dan
ketidakhadiran pada carrier yang digunakan. Sifat dari ASK antara lain:
1. Rentan untuk pergantian gain tiba-tiba
2. Tidak efisien.
3. Sampai dengan 1200bps pada voice grade line.
Jenis modulasi ASK, diantaranya sebagai berikut:
1. Binary-ASK (BASK)
Sinyal yang katakan termodulasi secara BASK didefenisikan dengan x(t) =
A m(t)sin( ct) 0 ≤ t ≤ T (1). A adalah konstanta, m(t) adalah sinyal data (sinyal pemodulasi) yang mempunyai nilai 0 atau 1, adalah frekuensi putar dari sinyal
pembawa, dan T adalah lebar dari satu bit. Sebuah sinyal digital, yang hanya
mengandung 0 dan 1, dimodulasikan dengan BASK, maka kita hanya akan
mengalikan sinyal pembawa dengan nilai 0 atau 1. Gambar 2.5 memperlihatkan
modulasi BASK untuk sebuah sinyal digital yang diberikan 0 1 0 1 0 0 1 0. Seperti
terlihat di gambar 2.5, sinyal-sinyal BASK bisa didapat dengan cara menyalakan
dan mematikan (on dan off) sinyal pembawa, tergantung apakah sinyal informasi
11
Gambar 2.5 Binary-ASK (BASK)
Dengan mengandaikan bahwa sinyal m(t) adalah sinyal periodis dengan 0
1 0 1 0 1 0 1. Jika lebar pita (bandwidth) dari sinyal informasi didefinisikan
sampai nol yang pertama, maka ;
B = 4/T
2.2.3. Teori Modulasi FSK (Frekuensi Shift Keying)
Frekuensi Shift Keying (FSK) adalah modulasi frekuensi skema dimana
informasi digital ditularkan melalui perubahan frekuensi diskrit suatu gelombang
pembawa. FSK termudah adalah FSK biner (BFSK). BFSK berarti menggunakan
sepasang frekuensi diskrit untuk mengirimkan biner (0s dan 1s) informasi.
Dengan skema ini, "1" disebut frekuensi tanda dan "0" disebut frekuensi ruang.
Domain waktu dari sebuah carrier termodulasi FSK diilustrasikan pada Gambar
2.6
12 Pada sistem FSK, dua buah sinyal sinusoidal dengan amplitudo maksimum
sama Ac, tetapi frekuensi berbeda, f1 dan f2, digunakan untuk merepresentasikan
biner 1 dan 0. Secara matematis dapat dituliskan.
S(t) cos(2 ) 1s t A f t c untuk simbol „1‟
S(t) cos(2 ) 2s t A f t c untuk simbol „0‟
Modulasi FSK merupakan modulasi yang mempunyai kinerja yang lebih
baik dan menggunakan sistem deteksi yang lebih sederhana dibandingkan dengan
PSK. Oleh karena itu penerapan cukup luas pada sistem trasmisi data.
Frequency Shift Keying (FSK) relative sederhana, FSK memiliki bentuk
penampakan gelombang yang konstan dari modulasi sudut yang similar (sama)
terhadap frekuensi modulasi konvensional kecuali bahwa sinyal modulasinya
adalah untaian pulsa biner yang bervariasi di antara dua level tegangan diskrit
dibanding perubahan bentuk gelombang secara terus-menerus.
2.2.4. Teori Modulasi PSK (Phase Shift Keying)
Dalam sistem PSK, sinyal pembawa sinusoidal dengan amplituda Ac dan
frekuensi fc digunakan untuk merepresentasikan kedua symbol “1” dan “0”, hanya saja fasa sinyal pembawa untuk kedua simbol tersebut dibuat berbeda 1800.
Secara matematis dapat dituliskan:
13 Pembangkitan sinyal BPSK serupa dengan pembangkitan sinyal BASK,
kecuali data binernya dalam format polar, seperti tampak pada gambar 2.8.
Gambar 2.8 Pembangkitan Sinyal BPSK
2.2.5. Koneksi Nirkabel
Teknologi nirkabel atau wifi selalu menarik perhatian bagi kebanyakan
orang, tua-muda semakin asyik menikmati hidup dengan koneksi nirkabel.
Keasyikkan berkoneksi nirkabel menurut fungsinya berkaitan erat dengan
kemudahan pencapaian produktivitas usaha.
Komunikasi wireless merupakan media transmisi antara pengiriman data
(transmitter) dengan penerima data (receiver) tanpa perantara kabel. Data-data
yang bergerak dari pemancar (transmitter) menuju penerima (receiver) merambat
secara bebas di udara. Data-data tersebut berupa sinyal radio dengan frekuensi
yang berbeda. Frekuensi tersebut memiliki hubungan berbanding terbalik dengan
panjang gelombang yang merambat di udara.
1. Transmit (Tx)Power
Radio mempunyai daya untuk menyalurkan sinyal pada frekuensi tertentu.
Daya itu disebut Transmit (Tx) Power. Dihitung dari besar energi yang disalurkan
melalui satu lebar frekuensi (bandwidth) misalnya, satu radio memiliki Tx Power
14
2. Received (Rx) Sensitivity
Semua radio memiliki point of no return, yaitu keadaan ketika radio
menerima sinyal kurang dari Rx Sensitivity yang ditentukan, dan radio tidak
mampu melihat datanya.
Frekuensi adalah banyaknya getaran per detik dalam arus listrik yang terus
berubah. Satuan frekuensi adalah Hertz disingkat Hz. Jika arus bergerak lengkap
satu getaran per detik, maka frekuensinya 1 Hz. Satuan frekuensi lain:
1. Kilohertz (kHz)
2. Megahertz (MHz)
3. Gigahertz (GHz)
4. Terahertz (THz)
Sementara itu, panjang gelombang atau wavelength adalah jarak di antara
kedua titik yang sama pada satu getaran. Dalam sistem nirkabel (wireless),
biasanya diukur dalam satuan meter, sentimeter atau milimeter.
Tabel 2.1 Frekuensi Spektrum dan Panjang Gelombang
Designation Abbreviation Frequencies Free-space
Wavelengths
Very Low Frequency VLF 9 kHz–30 kHz 33 km–10 km
Low Frequency LF 30 kHz–300 kHz 10 km–1 km
Medium Frequency MF 300 kHz–3 MHz 1 km–100 m
High Frequency HF 3 MHz–30 MHz 100 m–10 m
Very High Frequency VHF 30 MHz–300
MHz 10 m–1 m
Ultra High Frequency UHF 300 MHz–3 GHz 1 m–100 mm
Super High Frequency SHF 3 GHz–30 GHz 100 mm–10 mm
Extremely High
15
2.3. Teknik Komunikasi Data Digital
Sinkronisasi merupakan salah satu tugas utama dari komunikasi data.
Transmitter mengirimkan pesan 1 bit pada satu saat melalui medium ke receiver.
Receiver harus mengenal awal dan akhir dari blok-blok bit dan harus mengetahui
durasi dari tiap bit sehingga dapat men-sample line tersebut dengan timming yang
tepat untuk membaca tiap bit.
2.3.1 Transmisi Asinkron
Transmisi asinkron adalah transmisi data dimana kedua pihak, pengirim atau
penerima tidak perlu berada pada waktu yang sinkron. Metode transmisi ini
diterapkan pada komunikasi data dimana kecepatan piranti pengirim dan piranti
penerima jauh berbeda. Transmisi asinkron digunakan bila pengiriman data
dilakukan satu karakter setiap kali. Karakter dapat dilakukan secara sekaligus
ataupun beberapa karakter kemudian berhenti untuk waktu tidak tentu lalu
mengirimkan isinya.
2.3.2 Transmisi Sinkron
Pada transmisi data sinkron sejumlah blok data dikirimkan secara kontinyu
tanpa bit awal atau bit akhir. Detak pada penerima dioperasikan secara kontinyu
dan dikunci agar sesuai dengan detak pada pengirim. Untuk mendapatkan keadaan
yang sesuai, informasi pendetakan harus dikirimkan lewat jalur bersama-sama
dengan data dengan memanfaatkan metode penyadian tertentu sehingga informasi
pendetakan dapat diikut sertakan atau dengan menggunakan modem yang
menyandikan informasi pendetakan selama proses modulasi. Data secara kontinyu
akan dikirimkan terus menerus tanpa adanya pembatas (gap). Interval waktu
antara bit terakhir dari suatu karakter dengan bit pertama dari karakter berikutnya
adalah nol atau kelipatan bulat dari periode waktu yang diperlukan untuk
mengirimkan sebuah karakter.
Arah transmisi dari dua piranti yang berkomunikasi dapat dibedakan menjadi
16 1. Simplex
Menyatakan komunikasi antara dua piranti hanya bisa dilakukan satu arah saja.
Gambar 2.9. Arah Transmisi Simplex
2. Half Duplex
Menyatakan komunikasi antara dua piranti hanya bisa dilakukan dua arah
namun tidak secara serentak tetapi bergantian. Bila satu piranti sedang
mengirim yang lain hanya menerima.
Gambar 2.10. Arah Transmisi Half Duplex
3. Full Duplex
Menyatakan komunikasi antara dua piranti hanya bisa dilakukan dua arah dan
bisa serentak (bersamaan).
Gambar 2.11. Arah Transmisi Full Duplex
2.4. Perangkat Keras
2.4.1. Mikrokontroler AT89C51
Komponen utama sistem identifikasi posisi benda ini adalah
mikrokontroler AT89C51. AT89C51 adalah mikrokontroler keluaran atmel
dengan 4K byte (In-System Programmable Flash Memory), AT89C51 merupakan
memori dengan teknologi nonvolatile memori dan memori ini dapat diisi ulang
17 Memori ini bisa digunakan untuk menyimpan instruksi berstandar pada
kode MCS-51 sehingga memungkinkan mikrokontroler ini bekerja dalam mode
single chip operation (mode operasi keping tunggal) yang tidak memerlukan
memori luar untuk menyimpan source code tersebut.
Konfigurasi pin mikrokontroler AT89C51 ditunjukkan pada Gambar 2.9
ATMEL AT89C51 40 39 38 37 36 35 34 33 32 31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 VCC P0.0 (AD0) P0.1 (AD1) P0.2 (AD2) P0.3 P0.4 P0.5 P0.6 P0.7 EA/VPP ALE/PROG PSEN P2.7 P2.6 P2.5 P2.4 P2.3 P2.2 P2.1 P2.0 (AD3) (AD4) (AD5) (AD6) (AD7) (A15) (A14) (A13) (A12) (A11) (A10) (A9) (A8) GND XTAL1 XTAL2 (RD) P3.7 (WR) P3.6 (T1) P3.5 (T0) P3.4 (INT1) P3.3 (INT0) P3.2 TXD P3.1 RXD P3.0 RST P1.7 P1.6 P1.5 P1.4 P1.3 P1.2 P1.1 P1.0 PORT 0 PORT 2 PORT 3 PORT 1
Gambar 2.12 Konfigurasi pin Mikrokontroler AT89C51
2.4.1.1. Deskripsi kaki AT89C51
Pada AT89C51 memiliki masing-masing fungsi untuk setiap kakinya.
Adapun masing-masing fungsi dari setiap kakinya adalah sebagai berikut:
Port 0
Port 0 terdiri dari 8 kaki (p0.0-p0.7), yaitu kaki ke 39 sampai kaki ke 32. Port ini
biasa berfungsi sebagai I/O biasa, low order multiplex address/data ataupun
menerima kode byte pada saat flash progamming. Port ini dapat memberikan
output sink ke 8 buah TTL (transistor transistor logic) input atau bisa di ubah
18
Port 1
Port 1 terdiri dari 8 kaki (p1.0 – p1.7), yaitu kaki ke 1 sampai ke 8. Port ini bisa berfungsi sebagai I/O biasa atau menerima low order address byte selama flash
programming. Port ini mempunyai internal pull up dan untuk digunakan sebagai
input maka harus di berikan logika 1 pada port ini. Pada saat digunakan sebagai
output port ini dapat memberikan output sink ke 4 buah TTL (transistor transistor
logic).
Port 2
Port 2 terdiri dari 8 kaki (p2.0 – p2.7), yaitu kaki ke 21 sampai kaki ke 28. Port ini juga bisa digunakan sebagai I/O biasa atau high order address pada saat
mengakses memori external secara 16 bit (movx @DPTR). Pada saat mengakses
memori external secara 8 bit (mov@RI) port ini akan mengeluarkan isi dari port 2
special function register. Port ini mempunyai internal pull up dan berfungsi
sebagai input dengan memberikan nilai logika 1. Dan sebagai output port ini bisa
memberikan output sink ke 4 buah input TTL (transistor transistor logic).
Port 3
Port 3 terdiri dari 8 kaki juga (p3.0 – p3.7) yaitu kaki ke 10 sampai kaki ke 17. sebagai I/O biasa port 3 mempuyai sifat yang sama dengan port 1 dan 2.
sedangkan sebagai fungsi spesial port-port ini mempunyai keterangan sebagai
berikut:
P3.0 (RXD) berfungsi sebagai port serial input.
P3.1 (TXD) berfungsi sebagai port serial output.
P3.2 (INT0) berfungsi sebagai port external interupt 0.
P3.3 (INT1) berfungsi sebagai port external interupt 1.
P3.4 (T0) berfungsi sebagai port external timer input 0.
P3.5 (T1) berfungsi sebagai port external timer input 1.
P3.6 (WR) berfungsi sebagai external data memori write strobe.
P3.7 (RD) berfungsi sebagai external data memori read strobe.
Pin 9 (RST) reset akan aktif dengan memberikan input high selama 2 cycle.
Pin 18 (XTAL2) merupakan output oscillator.
Pin 19 (XTAL1) merupakan input oscillator.
19 Pin 29 (PSEN) pin ini berfungsi pada saat mengeksekusi program yang terletak
pada memori external. PSEN akan aktif dua kali setiap cycle.
Pin 30 (ALE) pin ini bisa berfungsi sebagai address latch enable (ALE) yang
melakukan latch low byte address pada saat mengakses memori external.
Sedangkan pada saat flash programing berfungsi sebagai pulsa input pada operasi
normal, ALE akan mengeluatkan sinyal clock sebesar 1/6 frekwensi oscillator
kecuali pada saat memori external, sinyal clock pada pin ini dapat disable dengan
di set bit 0 dari special junction register di alamat 8Eh ALE hanya akan aktif pada
saat mengakses memori external (movx dan movc).
Pin 31 (EA) Pada kondisi rendah, pin ini akan berfungsi sebagai EA yaitu
mikrokontroler akan menjalankan program yang ada pada memori external setelah
sistem di reset. Jika kondisi tinggi, pin ini akan berfungsi untuk menjalankan
program yang ada pada memori internal. Pada saat flash programing pin ini akan
mendapatkan tegangan 12 Volt.
2.4.1.2. Struktur Memori
AT89C51 mempunyai struktur memori yang terdiri atas:
1. RAM internal adalah memori sebesar 128 Byte yang biasanya digunakan untuk
menyimpan variabel atau data yang bersifat sementara, terdiri dari:
a. Register Banks
AT89C51 mempunyai delapan buah register yang terdiri atas R0 hingga
R7. ke 8 register ini selalu terletak pada alamat 00h hingga 07h pada
setiap kali sistem di reset. Namun posisi R0 hingga R7 dapat di pindahkan
ke bank 1 (08H hingga 0FH), bank 2 (10H hingga 17H) atau bank 3 (18H
hingga 1FH) dengan mengatur bit RS0 dan RS1.
b. Bit addressable RAM
RAM pada alamat 20H hingga 2FH dapat diberi akses secara pengalamatan
bit, sehingga hanya dengan sebuah instruksi saja setiap bit dalam area ini
20 c. RAM keperluan umum
RAM keperluan umum dimulai dari alamat 30H hingga 7FH dan dapat
diakses dengan pengalamatan langsung maupun tidak langsung.
2. Special function register adalah memori yang berisi banyak register yang
mempunyai fungsi-fungsi khusus yang disediakan oleh mikrokontroler
tersebut, seperti timer, serial dan lain-lain.
3. In-system programable flash Memory adalah memori yang digunakan untuk
menyimpan instruksi-instruksi MCS 51.
2.4.2. Pengaturan Baudrate
TH1 (Timer High 1) dapat digunakan sebagai pewaktu untuk mengatur
baudrate pada komunikasi serial. Lama pengiriman setiap bit data = timer 1
overflow x 32. Jadi, jumlah data yang terkirim setiap detik =
32) x overflow 1 (timer 1
12 x (FFh-TH1) = ……….…….………..(2.1) Fosc
TH1 ………..(2.2)
Jika diinginkan baudrate 1200 bps, timer 1 harus diatur agar overflow
setiap
32) x (1200
1 detik. Timer 1 overflow setiap TH1 mencapai nilai FFH
dengan frekuensi sebesar 12 Fosc
. Maka formulasi untuk kasus ini adalah:
TH1 ……….(2.3)
Dengan frekuensi osilator sebesar 11,0592 MHz, TH1 adalah 232 atau FDH.
2.4.3. Port USB
USB(Universal Serial Bus) ialah suatu teknologi standar bus berseri untuk
digunakan pada perangkat penghubung, biasanya pada komputer namun juga
digunakan pada peralatan lainnya. USB sangat mendukung transfer data sebesar
32 1 baudrate 32 12 256 baudrate Fo sc
32 1200 12
21 12 Mbps ( juta bit per detik). Komputer (PC) saat ini, umumnya sudah memiliki
port USB. Biasanya disediakan minimal 2 port, jika dibandingkan dengan paralel
port dan serial port, penggunaan port USB lebih mudah dalam penggunaannya.
Jika dibuka, kabel USB akan terlihat ada 4 warna yaitu merah, coklat,
kuning dan biru. Kabel berwarna merah dan coklat berfungsi sebagai power /
untuk arus listrik. Kabel berwarna kuning dan biru berfungsi untuk membawa /
mentransfer data.
Contoh perangkat-perangkat yang sudah menggunakan koneksi USB:
1.
Printer2.
Scanner3.
Mouse4.
Joysticks5.
Flight yokes6.
Kamera Digital7.
Webcam8.
Modem9.
Speaker10.
Video phone2.4.4. Serial Port
Komunikasi data pada umumnya dapat dilakukan dengan dua cara, yaitu
secara serial dan secara paralel. Komunikasi data serial dilakukan dengan
mengirimkan dan menerima data 8 bit secara satu per satu, sedangkan komunikasi
data paralel dilakukan dengan mengirimkan dan menerima data 8 bit secara
bersamaan atau sekaligus. RS232 (recommended standard number 232)
merupakan seperangkat alat yang diciptakan oleh Electrical Industries Assosiation
yang berfungsi sebagai antarmuka dalam transfer data dengan komputer yang
mana pengiriman data dilakukan dengan mengirimkan kode biner. Pada
22 dengan COM. Biasanya terdapat dua buah Communication Port, yaitu COM1 dan
COM2.
Pada dasarnya ada dua jenis komunikasi data serial, yaitu komunikasi data
serial sinkron dimana pengiriman clock dilakukan secara bersamaan dengan data
serial dan komunikasi data serial asinkron dimana pengiriman clock dilakukan
secara dua tahap, yaitu saat data dikirimkan dan saat data diterima RS232. Pada
komputer mempunyai dua jenis konektor, yaitu konektor dengan 25 pin atau
sering disebut konektor DB 25 dan konektor dengan 9 pin atau sering disebut
konektor DB 9. Untuk DB 9 pada dasarnya hanya 3 pin yang terpakai, yaitu pin
pengirim, penerima dan ground. Perlu diperhatikan bahwa dalam pengiriman data
serial semakin jauh jarak kirim maka kemungkinan noise atau gangguan semakin
besar.
Dalam setiap proses transfer data serial, RS232 memerlukan sebuah Data
Terminal Equipment atau sering disebut DTE dan Data Communication
Equipment atau sering disebut DCE pada masing-masing terminal. Pengiriman
data dilakukan secara bit per bit, misalnya jika ingin mengirim suatu karakter (A)
yang dalam format ASCII adalah 41H atau 01000001 biner maka data akan
dikirim mulai dari bit pertama, kedua, sampai bit terakhir. Kecepatan transfer data
harus sama antara penerima dan pengirim, jika kecepatannya tidak sama maka
akan terjadi overflow. Kecepatan transmisi tersebut biasanya sering disebut
dengan baudrate. Baudrate yang sering dipakai diantaranya adalah 110, 300,
1200, 2400, 4800, 9600, 19200, 38400, 57600, 230400, 460800, dan 921600.
panjang data bit yang sering digunakan diantaranya adalah 4, 5, 6, 7, dan 8 bit.
Pada komunikasi data serial pada dasarnya yang dikirimkan adalah
tegangan dan kemudian dibaca dalam data bit. Besar level tegangannya adalah
antara -25 Volt sampai +25 Volt. Untuk bit dengan logika 1 maka besar level
tegangannya adalah antara -3 Volt sampai -25 Volt, sedangkan untuk bit dengan
logika 0 maka besar level tegangannya adalah antara +3 Volt sampai +25 Volt.
Ada beberapa besar level tegangan yang tidak mempunyai logika, yaitu antara -3
Volt sampai +3 Volt, lebih kecil dari -25 Volt, dan lebih besar dari +25 Volt.
23
Gambar 2.13 Konektor DB 9
Berikut ini adalah tabel penggunaan pin, dan jenis sinyal konektor DB-9.
Tabel 2.2 Nama Sinyal DB-9
Pin (DB-9) Nama Sinyal Jenis
1 Data Carrier Detect Input
2 Received Data(RxD) Input
3 Transmite data(TxD) Output
4 Data Terminal
Ready(DTR)
Output
5 Ground -
6 Data Set Ready(DSR) Input
7 Request To Send(RTS) Output
8 Clear To Send(CTS) Input
9 Ring Indicator Input
Keterangan:
1. Pin 1 (Data Carrier Detect) berfungsi untuk mendeteksi boleh atau
tidaknya DTE menerima data.
2. Pin 2 (Received Data) berfungsi sebagai jalur penerimaan data dari DCE
24 3. Pin 3 (Transmited Data) berfungsi sebagai jalur pengiriman data dari DTE
ke DCE.
4. Pin 4 (Data Terminal Ready) berfungsi untuk memberitahu kesiapan
terminal DTE.
5. Pin 5 (Ground) berfungsi sebagai saluran .
6. Pin 6 (Data Set Ready) berfungsi untuk menyatakan bahwa status data
tersambung pada DCE.
7. Pin 7 (Request To Send) berfungsi untuk mengirim sinyal informasi dari
DTE ke DCE bahwa akan ada data yang akan dikirim.
8. Pin 8 (Clear To Send) berfungsi untuk memberitahu pada DTE bahwa
DCE siap untuk menerima data.
9. Pin 9 (Ring Indicator) berfungsi untuk memberitahu DTE bahwa ada
terminal yang menginginkan komunikasi dengan DCE.
2.4.4.1. Converter RS232
RS232 digunakan sebagai driver tegangan yang akan mengkonversi
tegangan dari hardware agar sesuai dengan tegangan pada komputer sehingga
dapat dibaca.
Penulis menggunakan DB 9 untuk komunikasi dengan komputer secara
serial, untuk itu mikrokontroler memerlukan sebuah piranti yang berfungsi
sebagai pengubah level tegangan. RS232 menggunakan level/karakteristik elektrik
yang berbeda dengan level TTL (transistor transistor logic). RS232 bekerja pada
level tegangan +3 s/d +25 Volt untuk space (logic 0) dan -3 s/d -25 Volt untuk
mark (logic 1). Sedangkan TTL (transistor transistor logic) bekerja pada level
tegangan -5 s/d +5 Volt. Piranti tambahan yang kita butuhkan adalah IC RS232.
Pada dasarnya IC ini hanya digunakan sebagai pengubah level tegangan ke level
Transistor Transistor Logic (TTL), tidak berfungsi sebagai pengkodean sinyal
yang melewati DB 9, dan juga tidak mengkonversikan data serial ke paralel.
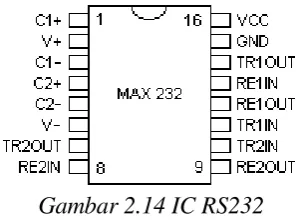
25
Gambar 2.14IC RS232
DB 9 sebagai komunikasi serial mempunyai 9 pin yang memiliki fungsi
masing-masing. Pin yang biasa digunakan adalah pin 2 sebagai received data, pin
3 sebagai transmited data, dan pin 5 sebagai ground signal. Karakteristik elektrik
dari DB 9 adalah sebagai berikut :
1. Space (logic 0) mempunyai level tegangan sebesar +3 s/d +25 Volt.
2. Mark (logic 1) mempunyai level tegangan sebesar -3 s/d -25 Volt.
3. Level tegangan antara +3 s/d -3 Volt tidak terdefinisikan.
4. Arus yang melalui rangkaian tidak boleh melebihi dari 500 mA, ini
dibutuhkan agar sistem yang dibangun bekerja dengan akurat.
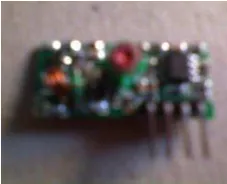
2.4.5. Modul TLP434 dan RLP 434
Merupakan sebuah modul pemancar-penerima sederhana. dengan
frekuensi pembawa 434MHz. Penggunaan catu daya pemancar ini berkisar antara
2-12 Volt sedangkan catu daya penerima berkisar antara 3,3-6 Volt. Kecepatan
maksimum pengiriman data modul ini mencapai 200kbps. Dalam proses
pengiriman data dari transmiter ke receiver.
Didalam Tugas Akhir ini menggunakan seperangkat modul TLP434
transmitter yang tersedia dipasaran sebagai media pengirim dan penerima sinyal
yang akan diteruskan ke bagian mikrokontroler AT89C51 yang akan
menterjemahkan setiap terjadi perubahan frekuensi yang diterimanya, dan akan
diteruskan pada pergerakan kamera, sedangkan pada pengiriman data karakter
menggunakan modulasi ASK (Amplitudo Shift Keying) sebagai transmisi data
digital. Data yang dikirimkan dari Modem ke PC terlebih dahulu ditransmisikan
dengan RS232, dimana RS232 adalah sebagai driver tegangan yang akan
mengkonversi tegangan dari hardware agar sesuai dengan tegangan pada
26
Gambar 2.15 Bentuk Hardware TLP434
[image:31.595.267.367.111.192.2]
Gambar 2.16 Bentuk Hardware RLP434
Modul ini menggunakan modulasi digital yaitu sinyal informasi
merupakan sinyal digital sedangkan gelombang pembawa merupakan sinyal
analog. Modulasi digital yang digunakan adalah modulasi amplitudo gelombang
pembawa atau disebut ASK (Amplitudo Shift Keying).
Seperti contoh pada gambar 2.12 dengan data digital yang kita miliki
yaitu 1001 ditambah dengan sinyal pembawa sebesar 315MHz, maka didapatkan
bentuk sinyal output dengan frekuensi sesuai frekuensi pembawa, tetapi dengan
bentuk sinyal sesuai bit-bit yang kita kirimkan.
Gambar 2.17 Modulasi Digital Amplitudo Shift Keying (ASK)
[image:31.595.252.366.237.329.2]27
2.4.6. Jenis-jenis Motor
Motor adalah merupakan bagian utama dari sebuah robot. Hampir semua jenis
robot kecuali yang menggunakan muscle wire (kawat otot) selalu menggunakan
motor. Jenis turtle, vehicle dan rover membutuhkan motor untuk menggerakkan
rodanya. Appendage membutuhkan motor untuk menggerakkan lengan dan
mencengkram. Walker dan android membutuhkan motor untuk menggerakkan
kakinya.
Terdapat beberapa jenis motor di pasaran dan untuk merancang sebuah
pergerakan kamera maka kita harus dapat memilih motor yang tepat sesuai
fungsinya pada pergerakan kamera tersebut.
[image:32.595.241.374.368.483.2]2.4.6.1. Motor DC
Gambar 2.18 MTR-DSR01 Motor DC dengan Rotary Encoder
Motor DC lebih cocok digunakan pada aplikasi yang menggunakan
kecepatan tinggi dan torsi yang cukup besar. Oleh karena itu, motor ini biasanya
digunakan pada bagian roda atau kaki sebagai penggerak dari sebuah robot.
MTR-DSR01 yang tampak pada gambar 2.15 adalah sebuah motor yang dilengkapi
dengan rotary encoder sehingga sistem dapat mengetahui kecepatan putar dari
motor tersebut.
Kecepatan putar motor dihitung berdasarkan jumlah putaran yang terjadi
28
2.4.6.1.1. Gear
Untuk memperkuat torsi sebuah motor yang biasanya dinyatakan dalam
kg-cm digunakan gear reduksi. Torsi diukur berdasarkan kemampuan sebuah tuas
sepanjang 1 cm untuk menggerakkan benda sebesar x kg.
Semakin lambat putaran motor akibat penambahan gear maka semakin
kuat torsi yang dihasilkan. Perubahan putaran ini berbanding terbalik dengan
perbedaan diameter gear. Kecepatan motor akan turun dua kali lipat untuk gear
yang dua kali lebih besar. Perlu diperhatikan bahwa gear yang digunakan harus
[image:33.595.230.412.285.374.2]memiliki ukuran gigi yang sama persis.
Gambar 2.19 Delta Robo Motor & Wheel Set
Gambar 2.16 adalah Delta Robo Motor & Wheel Set yang dilengkapi
dengan gearbox perbandingan 1 : 32 yang akan meningkatkan torsi motor 32 kali
lebih besar daripada yang dihasilkan oleh motor itu sendiri. Untuk mengatur
kecepatan gerak dari motor DC digunakan teknik PWM yaitu pengaturan lebar
pulsa dalam setiap detiknya. Semakin besar pulsa fase ON dari sebuah motor akan
semakin besar pula kecepatan motor tersebut.
2. 4.6.2. Motor Stepper
Torsi motor stepper tidak sebesar motor DC, namun motor ini mempunyai
tingkat presisi yang sangat tinggi dalam gerakannya. Kecepatan gerak motor ini
dinyatakan dalam stepper second atau jumlah step gerakan dalam setiap detiknya.
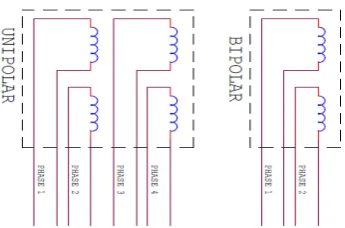
Secara umum terdapat dua jenis motor stepper yaitu bipolar dan unipolar.
Motor stepper unipolar terdiri dari dua buah motor yang masing-masing
mempunyai dua buah kumparan sedangkan motor stepper bipolar terdiri dari
29
Gambar 2.20 Motor Stepper Bipolar dan Unipolar
Pengendalian motor stepper dilakukan dengan mengaktifkan setiap
kumparan secara bergantian. Untuk motor stepper unipolar yang terdiri dari 4
kumparan terdapat 4 phase sedangkan untuk motor stepper bipolar yang terdiri
dari 2 kumparan terdapat 2 phase.
Sering kali untuk menghemat kabel, pada motor stepper unipolar ada
beberapa polaritas kumparan yang digabung seperti tampak pada gambar 2.18.
[image:34.595.218.391.108.222.2]Oleh karena itu akan sering juga dijumpai unipolar stepper dengan 6 atau 5 kabel.
Gambar 2.21 Motor Stepper Unipolar dengan Common yang Digabung
Pada sebuah robot, motor stepper lebih sering digunakan pada aplikasi
penggerak lengan, tuas penjepit dan lain-lain yang tidak memerlukan torsi dan
kecepatan yang terlalu besar namun dibutuhkan ketelitian saja.
2.4.6.3. Motor Servo
Berbeda dengan motor DC dan motor Stepper, motor servo adalah sebuah
motor dengan sistem closed feedback. Motor ini terdiri dari sebuah motor,
30 dengan memberi pulsa digital yang memiliki lebar tertentu melalui sebuah pin
kontrol untuk membuat motor ini berputar kearah jarum jam, berlawanan jarum
jam, atau bergerak ke posisi tengah. Dalam aplikasi ini sistem akan
mengendalikan posisi sudut dari poros standard servo motor sesuai perintah dari
komputer. Bahasa pemrograman mikrokontrolernya mengunakan bahasa asambler
dan Visual Basic.Net untuk pembuatan program aplikasi komputernya.
Potensiometer berfungsi untuk menentukan batas sudut dari putaran
servo. Sedangkan sudut dari sumbu motor servo diatur berdasarkan lebar pulsa
yang dikirim melalui kaki sinyal dari kabel motor. Tampak pada gambar dengan
pulsa 1.5 ms pada periode selebar 2 ms maka sudut dari sumbu motor akan berada
pada posisi tengah. Semakin lebar pulsa OFF maka akan semakin besar gerakan
sumbu kearah jarum jam dan semakin kecil pulsa OFF maka akan semakin besar
[image:35.595.260.363.644.722.2]gerakan sumbu ke arah yang berlawanan dengan jarum jam.
Gambar 2.22 Teknik PWM untuk mengatur sudut motor servo
Motor servo biasanya hanya bergerak mencapai sudut tertentu saja dan
tidak kontinyu seperti motor DC maupun motor stepper. Walau demikian, untuk
beberapa keperluan tertentu, motor servo dapat dimodifikasi agar bergerak
kontinyu.
31 Standard motor servo seringkali digunakan sebagai penggerak dalam
aplikasi robotika motor ini sering digunakan untuk bagian kaki, lengan atau
bagian-bagian lain yang mempunyai gerakan terbatas dan membutuhkan torsi
cukup besar, karena motor dengan built-in umpan balik posisi ini memiliki torsi
relatif cukup kuat meskipun hanya mampu berputar 0 sampai 180 derajat.
Karakteristik dari motor servo adalah sebagai berikut:
1. Voltage.
Tiap motor servo mempunyai tegangan rata-rata yang biasanya tertulis
pada tiap unitnya atau tercantum pada datasheet masing-masing motor servo.
Tegangan rata-rata ini harus diperhatikan dengan seksama karena bila melebihi
dari tegangan rata-rata ini akan menimbulkan panas yang terlalu besar pada motor
servo yang menyebabkan kinerja putarannya tidak maksimal atau bahkan motor
servo akan rusak dengan sendirinya. Adapun voltage yang dibutuhkan motor
servo adalah sebesar 6 VDC.
2. Waktu putar
Rata-rata waktu yang dimiliki motor servo adalah 1.5 detik / 180 derajat.
3. Berat dan ukuran servo
Berat yang dimiliki motor servo adalah 45 gram, dengan ukuran panjang 40.5
mm, lebar 20 mm, dan tinggi 38 mm.
4. Torsi putar
Berat benda maksimal yang bisa diputar sekitar 3.40 Kg dengan ukuran 3.40
cm.
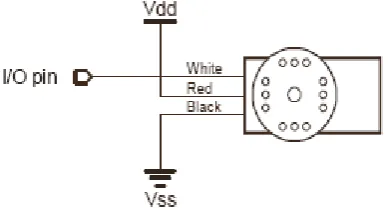
[image:36.595.230.426.602.707.2]Pengkabelan standar motor servo ditunjukkan pada Gambar 2.21.
32
Gambar 2.25 Standar motor servo
2.4.7. TV Tuner
Sebuah TV tuner terdiri dari beberapa komponen penyusun. Ada tiga
bagian utama, bagian input, bagian konversi data dan bagian output. Berikut
adalah Blok diagram dari TV tuner :
Gambar 2.26 Blok Diagram TV Tuner
1. Bagian Input
Sebagaimana perangkat Televisi Analog, TV tuner dilengkapi dengan
Analog TV Tuner yang berfungsi sebagai terminal sinyal input. Pada beberapa TV
tuner dilengkapi juga dengan FM tuner sebagai fitur tambahan.
Selain itu, TV tuner juga dilengkapi dengan Jack Video Input. Pada
beberapa TV tuner disertakan pula input audio-video untuk memutar dan
[image:37.595.246.379.416.529.2]33
2. Unit Pemroses
Bagian ini adalah sebuah chip yang bertugas sebagai tempat konversi dari
sinyal analog yang diterima oleh tuner diubah menjadi sinyal-sinyal digital.
Kinerja unit pemroses ini dibantu oleh sebuah memori berjenis ROM (read Only
Memory) yang berisi database TV tuner yang telah terprogram sebelumnya.
3. Bagian Output
Output dari TV tuner yang berupa video diproses dan terhubung dengan slot
ekspansi pada motherboard. Umumnya TV tuner menggunakan slot PCI untuk
menunjang transfer data dengan komputer. Bagian output audio memiliki jalur
terpisah, yaitu masuk ke bagian audio input pada motherboard.
4. Fitur yang ada Dalam TV tuner
Pada Beberapa TV tuner disuntikkan berbagai macam accessories audio
video. Diantaranya adalah FM tuner, Video Input dan S Video input.
Dalam satu unit TV tuner , memiliki beberapa alat tambahan, yaitu dapat
digunakan sebagai FM receiver dan sebagai Input Audio Video dari perangkat
elektronik lainnya, misal : DV Camera, CD atau DVD Player, Game Console,
[image:38.595.217.403.501.702.2]web Cam dan lain sebagainya.
34
5 Kinerja TV Tuner
TV tuner dapat digunakan untuk menampilkan dan merekam acara tv
melalui bus PCI dalam sebuah komputer, oleh sebuah chip tunggal.
Chip tersebut menggabungkan dua video ADCO 9 bit dan seluruh
masukan dari rangkaian decoding untuk beberapa sinyal analog TV seperti:
NTSC, PAL dan SECAM. Penyaring Multi line digunakan untuk melakukan
sinkronisasi sinyal agar menghasilkan kualitas gambar yang bagus dan bandwith
yang tinggi. Video yang tampil dapat diolah untuk direkam, dipotong (crop)
ataupun diperbesar ukuranya dengan menggunakan sebuah aplikasi dari
masing-masing TV tuner . Software aplikasi tersebut dapat digunakan untuk menangkap
video ke CPU untuk dikompres, dan menulis video ke layar dari sumber video
yang sama tapi dengan resolusi, warna, dan frame yang berbeda.
Gambar 2.28Diagram Chipset pada TV Tuner
Video dan transportasinya dikumpulkan pada FIFO konfigurasi dengan
kapasitas totalnya adalah 1 kB. Monitor pengendali DMA mengisi tingkat FIFO
dan menulis audio dan video yang termasuk chanel DMA. Ruang alamat virtual
memori yang ditranslate dalam pengalamatan physical (bus) dengan hardware
on-chip Memory Management Unit (MMU).
Aplikasi chipset tersebut didukung oleh desain referensi dan pengesetan
driver untuk sistem operasi pada Windows.
2.4.8. IC Regulator (LM 7805)
IC ini mempunyai tiga kaki yang digunakan sebagai komponen pendukung
35 menstabilkan tegangan 5V dan dapat bekerja dengan baik jika tegangan input
(Vin) lebih besar daripada tegangan output (Vout).
Bentuk IC LM7805 ditunjukkan pada Gambar 2.26
Gambar 2.29 IC LM7805
2.5. Bahasa Assembler
Assembler adalah program komputer yang mentranslasi program dari
bahasa assembler ke bahasa mesin. Sedangkan bahasa assembler adalah
ekuivalensi bahasa mesin. Mnemonics atau bisa juga disebut kode operasi
(Opcode) adalah kode-kode yang akan dikerjakan oleh program assembler yang
ada pada komputer ataupun mikrokontroler. Kode operasi yang dikerjakan oleh
mikrokontroler merupakan perintah-perintah atau instruksi-instruksi yang sangat
bergantung dengan jenis mikrokontroler yang digunakan. Contoh, untuk keluarga
MCS51 digunakan MOVX, MOV, ADD dan lain-lain.
Sedangkan kode operasi yang dikerjakan oleh program assembler yang
ada pada komputer atau assembler sangat bergantung pada program assembler
yang digunakan. Contoh, ORG, EQU, DB dan lain-lain.
Proses Assembler ditunjukkan pada Gambar 2.27 [2]
36 Program sumber assembler terdiri dari kumpulan baris-baris perintah dan
biasanya disimpan dengan extension.ASM dengan 1 baris untuk satu perintah,
setiap baris perintah tersebut bisa terdiri atas beberapa bagian (field), yakni bagian
label, bagian operand yang bisa lebih dari satu dan terakhir bagian komentar.
Assembler digunakan untuk mengatur kerja dari program assembler.
assembler tergantung pada program assembler yang dipakai. Ada beberapa
assembler yang umum, yang sama untuk banyak macam program assembler
diantaranya adalah :
1. ORG (Origin)
Digunakan untuk menyatakan lokasi memori tempat instruksi atau
perintah yang ada di bawahnya disimpan.
2. EQU (Equate)
EQU digunakan untuk mendefinisikan sebuah simbol atau lambang
assembler secara bebas.
3. DB (Define Byte)
Digunakan untuk memberikan nilai tertentu pada memori-program.
4. DW (Define Word)
Dipakai untuk memberi nilai 2 byte ke memory-program pada baris
bersangkutan. Assembler direcktive ini biasa dipakai untuk membentuk suatu
tabel yang isinya adalah nomor-nomor memory-program.
5. DS(Define Storage)
Assembler direcktive ini dipakai untuk membentuk variabel. Sebagai
variabel tentu saja memori yang dipakai adalah memori-data (RAM) bukan
memori-program (ROM).
Bahasa assembler pada alat ini sangat dibutuhkan sebaga interface
37 ke bahasa mesin sebagai perintah agar dapat menggerakan gerakan kamera
secara manual melalui mikrokontroler AT89C51 dan motor servo.
2.6. Hyperterminal
HyperTerminal atau juga lebih dikenali sebagai “hyperterm” adalah program komunikasi yang di sertakan secara include bersama keseluruhan sistem
pengoperasian windows.
Gambar 2.31 Tampilan dari Hyperterminal
Pada awalnya HyperTerminal adalah untuk mempermudah kita
menggunakan saluran telepon, untuk melakukan proses dial-up hanya di antara 2
komputer dengan tujuan memanfaatkan komunikasi data ke peranti luar . Namun
kini, Hyperterminal adalah sebuah program dengan fungsi yang boleh kita
gunakan untuk berhubungan dengan komputer lain di antaranya, sistem tampilan
buletin (Buletinbord=BBSs), dan sebagai host komputer jika menggunakan
modem.
HyperTerminal masih merupakan fasilitas pendukung yang berguna untuk
penyediaan dan pengujian modem, router atau sambungan yang lain seperti
computer dan peripheral lain.
Proses monitoring dilakukan oleh Hyperterminal dapat menampilkan dan
dapat memeriksa hasilnya, dimana dengan tampilan teks pada layar
38 Dengan kegunaan Hypertermina, kita dapat memindahkan berbagai jenis
file yang besar diantara komputer dengan mengunakan port com. Hyperterminal
juga dapat membantu menyelesaikan masalah code debug dari remote
terminalnya.
2.7. Pemograman Visual Basic.Net
Visual Basic.Net adalah paket bahasa pemrograman yang mempunyai
cakupan kemampuan yang luas dan sangat canggih. Secara umum, kemampuan
Visual Basic.Net adalah menyediakan komponen–komponen dan bahasa
pemrograman yang handal, sehingga memungkinkan untuk membuat program
aplikasi sesuai yang diinginan, dengan tampilan dan kemampuan yang canggih.
Pemrograman Visual Basic.Net pada TA ini dibuat sebagai antarmuka
program pada PC sebagai kendali dari pergerakan kamera dimana pada form nya
terdapat tombol-tombol naik,turun, kiri, kanan, ambil gambar, rekam video dan
sudut berapa derajat kamera bergerak, juga tampilan video yang akan
39
BAB III
PERANCANGAN SISTEM
Dalam sistem ini dirancang suatu teknologi pengendali kamera jarak jauh
menggunakan komunikasi frekuensi radio ASK (Amplitudo Shift Keying) sehingga
dalam alat ini di bagi menjadi dua bagian yang utama yaitu bagian pemancar
untuk memancarkan data dari komputer dan bagian penerima yaitu untuk
mengaplikasikan pengendalian kamera melalui komputer.
3.1. Perancangan Sistem Penggerak Motor
Dalam perancangan sistem pemancar atau pengirim data dan penerima
data dapat dilihat pada diagram blok dimana pada pengiriman data diawali oleh
komputer RS232 dan TLP434 sedangkan pada blok penerima diawali oleh
RLP434, mikrokontroler dan motor servo. Sedangkan kamera disimpan di blok
penerima dan penerima data kamera disimpan di blok pemancar.
Gambar 3.1 Blok Diagram Sistem
Gambar 3.1 adalah interkoneksi dari sistem pengiriman data dari komputer
(PC) untuk mengendalikan sistem kamera yang terdapat pada blok penerimaan
data, blok diagram ini diawali oleh sistem input yang terdapat pada sebuah
40 Motor
Servo 2
Motor Servo 1 sistem kamera, data yang akan dikirim dari komputer akan diubah menjadi data
TTL oleh sebuah RS232 yang akan diteruskan pada sebuah mikrokontoler.
Selain blok penerimaan data pada sistem ini terdapat sistem blok
penerimaan data dimana data akan diterima oleh RLP434 dimana blok ini
berfungsi untuk mengubah data frekuensi menjadi data digital sehingga dapat
diterusakan pada sebuah mikrokontroler untuk diaplikasikan pada sebuah motor
servo yang berfungsi untuk menggerakan sebuah kamera sehingga kamera
tersebut dapat dikendalikan.
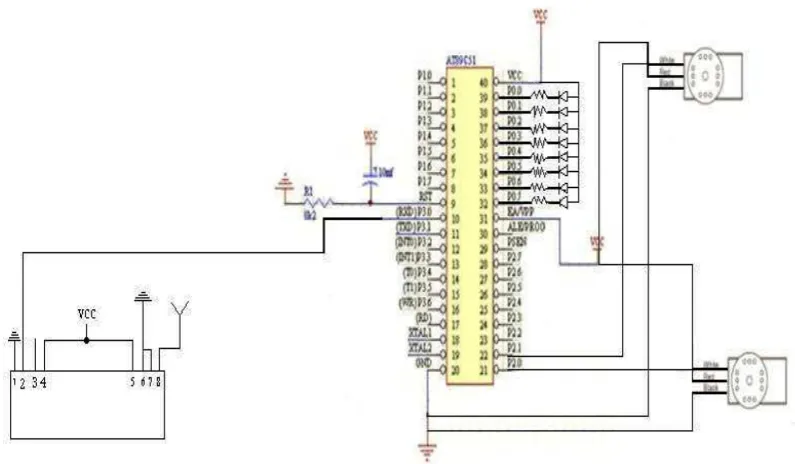
3.1.1 Rangkaian Interfacing Motor dengan Mikrokontroler
Perancangan perangkat keras elektronik dimulai dari studi literatur untuk
mendapatkan model skematik yang mudah dimengerti dan dipahami. Selain
mikrokontroler AT89C51, rangkaian ini untuk mengendalikan setiap perubahan
data yang dikirimkan oleh komputer atau untuk mengendalikan sistem kamera,
rangkaian ini dilengkapi oleh sebuah rangkaian reset yang terbuat dari satu buah
kapasitor 10 uF dan satu buah resistor 8,2 K yang brfungsi untuk memberikan
set bit pada sistem mikrokontoler. Selain itu rangkain mikrokontoler dilengkapi
dengan sebuah rangkaian extall yang terbuat dari dua buah kapasitor dan satu
buah crystal yang berfungsi untuk memberikan detak atau clock ke CPU yang
terdapat pada sistem mikrokontoler. Untuk mendapatkan tegangan DC yang stabil
maka digunakan regulator tegangan LM7805.
Rangkaian skematik sistem kontrol AT89C51 ditunjukkan pada Gambar 3.2
41
3.1.2. Rangkaian Motor Servo
Pada sistem pengendali untuk menggerakan kamera sistem ini
menggunakan dua buah motor servo yang berfungsi untuk mengendalikan kamera
sehingga dapat bergerak secara otomatis sesuai dengan data yang dikendalikan
menggunkan komputer, motor servo ini dihubungkan pada sistem mikrokontroler
pada blok penerima data.
Pengendalian gerakan batang motor servo dapat di lakukan dengan
menggunakan metode PWM (Pulse Width Modulation). Teknik ini menggunakan
sistem lebar pulsa untuk mengendalikan putaran motor. Sudut dari sumbu motor
servo diatur berdasarkan lebar pulsa yang dikirim melalui kaki sinyal dari kabel
motor. Dengan pulsa 1,5ms pada periode selebar 2 ms maka sudut dari sumbu
motor akan berada pada posisi tengah. Semakin lebar pulsa OFF maka akan
semakin besar gerakan sumbu ke arah jarum jam dan semakin kecil pulsa OFF
maka akan semakin besar gerakan sumbu ke arah yang berlawanan dengan jarum
jam.
3.1.3. Rangkaian RS232
Sistem rangkaian RS232 merupankan sebuah rangkaian yang terbuat dari
sebuah IC jenis TTL yang berfungsi untuk mengubah sistem data dengan level
RS232 menjadi sistem data digital, hal ini bertujuan untuk menyesuaikan antara
sistem data yang dikirimkan komputer dengan level data RS232 pada sebuah
mikrokontroler yang berlevel data TTL (transitor transitor logic), rangkaian ini
dilengkapi oleh beberapa buah elektrolit kondensator yang berfungsi untuk pompa
tegangan dimana perubahan level tegangan akan disesuaikan sesuai kebutuhan,
dimana pada level tegangan yang dihasilkan oleh komputer adalah 12V menjadi
level tegangan 5V sehingga dapat menunjang kinerja sistem, berikut ini ialah
42 1 2 3 4 5 6 7 8 9 C1+ VS+ C1-C2+ C2- VS-T2OUT R2IN R2OUT T2IN T1IN R1OUT R1IN T1OUT GND VCC 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 VCC 4 1 Rx Tx SN75176 10uF/ 16V 10uF/ 16V 10uF/ 16V 10uF/ 16V DB-9
Gambar 3.3 Rangkaian RS232
3.2. Perancangan Sistem Komunikasi dengan Penggerak
Perancangan sistem komunikasi dengan penggerak menggunakan
rangkaian Transceiver yang terdiri dari