BAB II
TINJAUAN PUSTAKA
2.1 Literature Review
Dari studi literature yang dilakukan, semakin besar sudut kelengkungan turbin, maka semakin besar jari-jari turbin, akibatnya gaya hambat yang dialami turbin semakin besar sehingga kecepatan putar turbin berkurang. Kecepatan putar turbin bertambah sebanding dengan bertambahnya kecepatan angin. Semakin besar jari-jari turbin, semakin besar pula torsinya, namun putaran yang dihasilkan turbin semakin kecil[5].
Pembuatan turbin angin tipe rotor helix dengan sistem modul dapat diaplikasikan, dengan setiap sambungannya dengan menggunakan mekanisme baut, sehingga turbin angin tipe helix mudah ditransportasikan. Semakin tinggi kecepatan angin yang melintas di turbin angin tipe helix ini, baik yang bersudu lurus maupun yang bersudu setengah lingkaran, maka semakin tinggi daya yang dihasilkan oleh generator. Untuk menghasilkan daya minimum 300 Watt baik yang bersudu lurus atau pun yang bersudu setengah lingkaran, turbin angin menggunakan empat buah turbin angin dengan tipe yang sama dengan kecepatan angin rata-rata 4 m/s[6].
Semakin pendek ukuran lengan, putaran generator yang dihasilkan semakin besar. Semakin pendek ukuran lengan, daya yang dihasilkan semakin besar. Semakin besar rasio gear yang digunakan, semakin besar putaran generator yang dihasilkan[7].
2.2 Turbin Angin
pengairan. Desain turbin angin yang ada saat ini terbagi menjadi dua, yaitu turbin angin sumbu mendatar (HAWT) dan turbin angin sumbu vertikal (VAWT)[8]. Bagian-bagian turbin angin dapat dilihat pada Gambar 2.1.
Gambar 2.1. Konstruksi turbin angin[8]
Keterangan gambar :
1. Arah angin pada HAWT tipe upwind 2. Diameter rotor
3. Hub height 4. Rotor blade 5. Gear box 6. Generator 7. Nacelle
8. Tower pada HAWT
9. Arah angin pada HAWT tipe downwind 10. Tinggi rotor
11. Tower pada VAWT 12. Equator height
Pemanfaatan energi angin telah dilakukan sejak lama. Pertama kali digunakan untuk menggerakan perahu di sungai Nil sekitar 5000 tahun lalu SM. Penggunaan kincir sederhana sudah dimulai sejak permulaan abad ke-7 dan tersebar di berbagai negara seperti Persia, Mesir, dan Tiongkok dengan berbagai desain. Di Eropa, kincir angin mulai dikenal sekitar abad ke-11 dan berkembang pesat saat revolusi industri pada awal abad ke-19. Kini turbin angin lebih banyak digunakan untuk mengakomodasi kebutuhan listrik masyarakat, dengan menggunakan prinsip konversi energi dan menggunakan sumber daya alam yang dapat diperbaharui yaitu angin. Walaupun sampai saat ini pembangunan turbin angin masih belum dapat menyaingi pembangkit listrik konvensional (Contoh: PLTD,PLTU,dll), turbin angin masih lebih dikembangkan oleh para ilmuwan karena dalam waktu dekat manusia akan dihadapkan dengan masalah kekurangan sumber daya alam tak terbaharui (Contoh : batubara, minyak bumi) sebagai bahan dasar untuk membangkitkan listrik[8].
Salah satu komponen yang dapat meningkatkan safety dan efisiensi dari turbin angin adalah rotor. Rotor ini berfungsi sebagai perubah gerak linier angin menjadi gerak putar sudu turbin. Untuk klasifikasi berdasarkan fungsi gaya aerodinamisnya, merujuk pada gaya utama yang menyebabkan rotor berputar. Berdasarkan fungsi dari gaya aerodinamis, rotor terbagi menjadi dua, yaitu rotor tipe drag dan rotor tipe lift[9].
1. Rotor tipe drag, memanfaatkan efek gaya hambat atau drag sebagai gaya penggerak rotor.
2. Rotor tipe lift, memanfaatkan efek gaya angkat sebagai gaya penggerak rotor. Gaya ini terjadi akibat angin yang melewati rotor.
Turbin angin sumbu vertikal/tegak (VAWT) memiliki poros/sumbu rotor utama yang disusun tegak lurus. Kelebihan utama susunan ini adalah turbin tidak harus diarahkan ke angin agar menjadi efektif. Kelebihan ini sangat berguna di tempat-tempat yang arah anginnya sangat bervariasi. VAWT mampu mendayagunakan angin dari berbagai arah[9].
keperluan perawatan/pemeliharaan. Tapi ini menyebabkan sejumlah desain menghasilkan tenaga putaran yang tidak stabil. Drag (gaya yang menahan pergerakan sebuah benda padat melalui fluida (zat cair atau gas) bisa saja tercipta saat kincir berputar. Karena sulit dipasang di atas menara, turbin sumbu tegak sering dipasang lebih dekat ke dasar tempat ia diletakkan, seperti tanah atau puncak atap sebuah bangunan. Kecepatan angin lebih pelan pada ketinggian yang rendah, sehingga tersedia energi angin yang sedikit. Jika tinggi puncak atap yang dipasangi menara turbin kira-kira 50% dari tinggi bangunan, ini merupakan titik optimal bagi energi angin yang maksimal dan turbulensi angin yang minimal[9].
Ada tiga tipe rotor pada turbin angin jenis ini, yaitu: Savonius, Darrieus, dan Helix rotor. Turbin Savonius memanfaatkan gaya drag sedangkan Darrieus dan Helix rotor memanfaatkan gaya lift. Turbin angin sumbu vertical dapat dilihat pada Gambar 2.2.
Gambar 2.2. Turbin angin sumbu vertical[9]
2.2.1. Teori Momentum Elementer Betz
Albert Betz seorang aerodinamikawan Jerman, adalah orang pertama yang memperkenalkan teori tentang turbin angin. Dalam bukunya “Die Windmuhlen
Gambar 2.3. Teori A. Betz[10]
Dalam sistem konversi energi angin, energi mekanik turbin hanya dapat diperoleh dari energi kinetik yang tersimpan dalam aliran angin, berarti tanpa perubahan aliran massa udara, kecepatan angin di belakang turbin haruslah mengalami penurunan. Dan pada saat yang bersamaan luas penampang yang dilewati angin haruslah lebih besar, sesuai dengan persamaan kontinuitas. Jika
kecepatan angin di depan rotor, Vkecepatan angin saat melewati rotor, dankecepatan angin di belakang rotor, maka daya mekanik turbin diperoleh dari selisih energi kinetik angin sebelum dan setelah melewati turbin, proil kecepatan angin melewati penampang rotor dapat dilihat pada Gambar 2.4[10].
Gambar 2.4. Profil kecepatan angin melewati penampang rotor[10]
2.2.2. Rotor
Bagian dari turbin angin yang mengumpulkan energi dari angin disebut dengan rotor (blade/baling-baling). Rotor biasanya terdiri dari dua atau lebih sudu yang terbuat dari kayu, fiberglass atau logam berkeliling sumbu (horizontal atau vertikal). Sudu-sudu dipasang pada naf (hub), yang menempel pada poros utama. Rotor didesain berdasarkan prinsip dasar drag dan lift[9].
menggerinda (di Belanda), pertanian (windmills). Sudu lift dikembangkan sama dengan prinsip dasar yang dimiliki pesawat, layangan dan burung untuk terbang. Sudu sebagai airfoil, atau sayap. Ketika udara melewati sudu, kecepatan angin dan perbedaan tekanan terjadi antara permukaan atas dan permukaan bawah sudu. Tekanan pada bagian bawah lebih besar dan mengakibatkan sudu terangkat. Ketika sudu-sudu dipasang pada sumbu utama, sama seperti baling-baling kincir angin, gaya angkat diubah menjadi putaran. Jenis lift ini memiliki putaran(rpm) yang lebih tinggi dari jenis drag[9].
Jumlah sudu rotor dan luas total yang ditutup sudu mempengaruhi performansi kincir angin. Untuk jenis baling-baling lift untuk mengefektifkan fungsinya, angin harus mengalir perlahan terhadap sudu. Untuk mencegah turbulen, ruang antara sudu harus lebih besar maka satu sudu tidak akan menghalangi aliran, aliran udara lemah disebabkan sudu telah dilewati sebelumnya[9].
2.2.3. Turbin Angin Savonius
Salah satu jenis turbin angin sumbu vertikal (VAWT) yang dapat digunakan pada angin dengan kecepatan rendah. Turbin ini ditemukan oleh sarjana Finlandia bernama Sigurd J. Savonius pada tahun 1922. Konstruksi turbin sangat sederhana, tersusun dari dua buah sudu setengah silinder[11]. Pada perkembangannya turbin Savonius ini banyak mengalami perubahan bentuk rotor, seperti yang terlihat pada Gambar 2.5.
2.3 Gerak dan Gaya
Suatu benda dikatakan bergerak jika benda tersebut berubah kedudukannya setiap saat terhadap titik acuannya (titik asalnya). Sebuah benda dikatakan bergerak lurus atau melengkung, jika lintasan berubah kedudukannya dari titik asalnya berbentuk garis lurus atau melengkung[12].
Kinematika dan Dinamika, kinematika adalah ilmu yang mempelajari gerak tanpa mengindahkan penyebabnya, sedangkan dinamika adalah ilmu yang mempelajari gerak dan gaya-gaya penyebabnya[12].
2.3.1. Hukum Newton Tentang Gerak.
Bila penyebab gerak diperhatikan disebut dinamika, melibatkan besaran-besaran fisika yang disebut gaya. Gaya adalah suatu tarikan atau dorongan yang dapat menimbulkan perubahan gerak. Dengan demikian jika benda ditarik/didorong maka pada benda bekerja gaya dan keadaan gerak benda dapat berubah. Gaya adalah penyebab gerak. Gaya termasuk besaran vektor, karena gaya mempunyai besar dan arahnya [12].
Hukum I Newton. Sebagai contoh ketika kita naik kereta api dalam keadaan diam, tiba-tiba melaju kencang maka tubuh kita akan terdorong kebelakang. Jika resultan dari gaya-gaya yang bekerja pada sebuah benda sama dengan nol ( F=0) maka benda tersebut ;
1. Jika dalam keadaan diam akan tetap diam, atau
2. Jika dalam keadaan bergerak lurus beraturan akan tetap bergerak lurus beraturan[12].
2.3.2 Gerak Melingkar
Gambar 2.6. Gerak melingkar[12]
Kecepatan pada gerak melingkar beraturan besarnya selalu tetap namun arahnya selalu berubah, arah kecepatan selalu menyinggung lingkaran, maka v selalu tegak lurus garis yang ditarik melalui pusat lingkaran ke sekeliling lingkaran tersebut terlihat pada Gambar 2.6.[12].
2.3.3 Radian
1 (Satu) radian adalah besarnya sudut tengah lingkaran yang panjang busurnya sama dengan jari-jarinya. Besarnya sudut seperti diperlihatkan pada Gambar 2.7.[12]
Gambar. 2.7. Ilustrasi radian[12]
2.3.4. Frekuensi dan perioda dalam gerak melingkar beraturan
Waktu yang diperlukan sebuah titik P untuk satu kali berputar mengelilingi lingkaran di sebut waktu edar atau perioda dan diberi notasi T. Banyaknya putaran per detik disebut frekuensi dan diberi notasi f. Satuan frekuensi ialah Hertz atau cps (cycle per second). Jadi antara f danTkita dapatkan hubungan [12]:
2.3.5. Kecepatan linier dan kecepatan sudut
Jika dalam waktu T detik ditempuh lintasan sepanjang keliling lingkaran sebesar s= 2 R, maka kelajuan partikel P untuk mengelilingi lingkaran dapat dirumuskan: v = ecepatan ini disebut kecepatan linier dan diberi notasi v.[12]
Kecepatan anguler (sudut) diberi notasi adalah perubahan dari perpindahan sudut persatuan waktu (setiap saat). Biasanya dinyatakan dalam radian/s, derajat per sekon, putaran per sekon (rps) atau putaran per menit (rpm). Bila benda melingkar beraturan dengan sudut rata-rata ( ) dalam radian per
Suatu peralatan yang berputar sebaiknya memiliki suatu nilai getaran standart dan batasan getaran yang diperbolehkan (dibuat oleh pabrik) sehingga apabila nilai getaran yang terjadi diluar batasan yang diizinkan maka peralatan tersebut harus menjalani tindakan perawatan. Semua mesin memiliki tiga sifat fundamental yang berhubungan untuk menentukan bagaimana mesin akan bereaksi terhadap kekuatan-kekuatan yang menyebabkan getaran-getaran, seperti sistem pegas-massa yaitu: [13]
1) Massa (m) : merupakan inersia untuk tetap dalam keadaan semula atau gerak. Sebuah gaya mencoba untuk membawa perubahan dalamkeadaan istirahat atau gerak, yang ditentang oleh massa dan satuannya dalam kg. 2) Kekakuan/stiffness (k) : ada kekuatan tertentu yang dipersyaratkan membengkokkan atau membelokkan struktur dengan jarak tertentu. Ini mengukur gaya yang diperlukan untuk memperoleh defleksi tertentu disebut kekakuan, satuannya dalam N / m.
untuk memperlambat gerak (kecepatan). Karakteristik ini untuk mengurangi kecepatan gerakan disebut redaman, satuannya dalam N /(m/s)[13].
Sebagaimana disebutkan di atas, efek gabungan untuk menahan pengaruh kekuatan karena massa, kekakuan dan redaman menentukan bagaimana suatu sistem akan merespon yang diberikan kekuatan eksternal. Sederhananya, cacat dalam mesin membawa gerakan getaran. Massa, kekakuan dan redaman mencoba untuk melawan getaran yang disebabkan oleh cacat. Jika getaran akibat cacat jauh lebih besar dari pada tiga karakteristik tersebut maka getaran yang dihasilkan akan lebih tinggi dan cacat dapat terdeteksi[13].
2.4.1 Konsep Analisa Getaran
Data getaran yang biasanya diperoleh dalam bentuk sinyal (analog) listrik yang kontinyu yang dihasilkan dari tranducer, dimana masing-masing sinyal analog tersebut menunjukan besar regangan, tegangan, gaya, atau parameter gerakan sesaat (displacement, velocity, dan acceleration ) sebagai fungsi waktu. Sinyal yang demikian disebut sebagai time history. Suatu sample data didefinisikan sebagai time history dari pengukuran getaran tunggal x(t) dalam durasi tertentu[14].
Getaran diartikan sebagai gerak osilatif disekitar posisi tertentu. Untuk getaran sebuah titik akibat operasi mesin, analisa getaran didasarkan pada peristiwa gerak osilatif yang periodik. Gerak periodik adalah suatu gerak gelombang yang berulang dalam selang waktu tertentu. Bentuk paling sederhana dari gerak periodik adalah gerak harmonik [14].
2.4.2 Karakteristik Getaran
Gambar 2.8. Sistem Getaran Sederhana[15]
Kondisi suatu mesin dan masalah-masalah mekanik yang terjadi dapat diketahui dengan mengukur karakteristik getaran pada mesin tersebut. Karakteristik getaran yang penting antara lain adalah:[15]
1) Frekuensi adalah jumlah siklus pada tiap satuan waktu. Besarnya dapat dinyatakan dengan siklus per detik (cycles per second/cps) atau siklus per menit (cycles per minute/cpm). Frekuensi juga bisa diartikan sebagai karakteristik dasar yang digunakan untuk mengukur dan menggambarkan getaran. Frekuensi getaran penting diketahui dalam analisis getaran mesin untuk menunjukkan masalah yang terjadi pada mesin tersebut. Dengan mengetahui frekuensi getaran, akan memungkinkan untuk dapat mengidentifikasikan bagian mesin yang salah (fault) dan masalah yang terjadi.
2) Perpindahan adalah gerakan suatu titik dari suatu tempat ke tempat lain yang mengacu pada suatu titik tertentu yang tidak bergerak (tetap). Dalam pengukuran getaran mesin, sebagai standar digunakan jarak perpindahan puncak ke puncak (peak to peak displacement). Perpindahan juga dapat mengindikasikan berapa jauh suatu objek bergetar.
4) Percepatan adalah perubahan kecepatan per satuan waktu. Percepatan berhubungan erat dengan gaya. Gaya yang menyebabkan getaran pada bantalan mesin atau bagian-bagian lain dapat ditentukan dari besarnya getaran. Juga dapat mengindikasikan suatu objek bergetar terkait dengan gaya penyebab getaran.
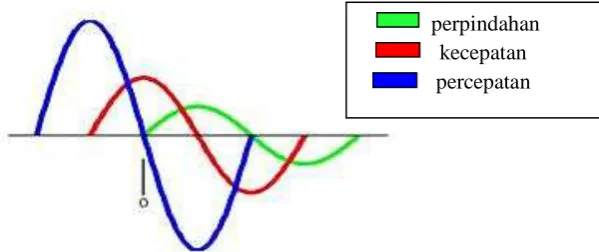
5) Phase mengindikasikan bagaimana suatu bagian bergetar relatif terhadap bagian yang lain, atau untuk menentukan posisi suatu bagian yang bergetar pada suatu saat, terhadap suatu referensi atau terhadap bagian lain yang bergetar dengan frekuensi yang sama. Fasa menunjukkan perbedaan awal siklus terjadi. Hubungan fasa antara perpindahan, kecepatan, dan percepatan diilustrasikan pada Gambar 2.9. kecepatan puncak maju (peak forward velocity) terjadi pada 900 sebelum puncak perpindahan positif (peak positive displacement). Dengan kata lain, kecepatan mendahului 900 terhadap perpindahan, sedangkan percepatan tertinggal 1800 terhadap perpindahan[15].
Gambar 2.9. Beda fasa antara perpindahan, kecepatan, dan percepatan[15]
Hubungan antara perpindahan dan waktu untuk gerak harmonic dapat dinyatakan secara matematik sebagai berikut :
………...(2.3)
Dimana perpindahan maksimum diekspresikan sebagai A
dengan differensiasi. Dengan menggunakan notasi titik untuk turunannya, maka didapat :
Kecepatan(Velocity) mm/s
………...………(2.4)
Percepatan (Acceleration) mm/s2
………...……(2.5)
Dengan amplitudo maka dapat terbaca indikasi beratnya kerusakan pada mesin dan juga dapat digunakan untuk mengukur beberapa masalah getaran, yang menunjukkan Displacement dan Frequency.
Gambar 2.10. Hubungan phasa perpindahan, kecepatan, dan percepatan pada gerak harmonik[15]
2.4.3 Standard Getaran (Vibrasi) Untuk Pompa Sentrifugal
Sampai saat ini sangat sulit untuk mendapatkan standart vibrasi untuk pompa sentrifugal, bahkan pabrikan pembuat pompa tidak dapat memberikan standar vibrasi dari pompa buatannya. Demikian juga dengan vibrasi yang timbul akibat kesalahan perencanaan dan pengoperasian, seperti tinggi tekan dan kapasitas pompa jauh lebih besar dari tinggi tekan sistem atau instalasi. Sehingga pengoperasian yang dilakukan dengan mengatur secara paksa tinggi tekan dan kapasitas yang akan menimbulkan vibrasi yang besar. Berdasarkan standart ISO 10816-3 untuk standart vibrasi, memberikan batasan-batasan vibrasi berdasarkan kecepatan (velocity) yang dikategorikan dalam beberapa zona dan warna seperti ditunjukkan pada Gambar 2.11. [16]
Gambar 2.11.ISO 10816-3 Untuk Vibrasi [16]
Keterangan Gambar di atas sebagai berikut :
1. Zona A bewarna hijau, getaran dari mesin sangat baik dan di bawah getaran
yang diijinkan.
2. Zona B bewarna hijau muda, getaran dari mesin baik dan dapat dioperasikan
tanpa larangan.
3. Zona C bewarna kuning, getaran dari mesin dalam batas toleransi dan hanya
dioperasikan dalam waktu terbatas.
Zona D bewarna merah, getaran dari mesin dalam batas berbahaya dan dapat terjadi
kerusakan sewaktu-waktu.
2.5 Modal Analisis (Mode Superposition Methods)
Modal analisis adalah suatu proses penentuan karakteristik dinamik dari suatu sistem. Modal analisis menjadi dasar mangapa respon getaran suatu sistem dapat di ekspresikan sebagai kombinasi linier dari respon kordinat modalnya. Modal ini mencakup instrumentasi, pengolahan sinyal, estimasi parameter, dan analisis vibrasi [16].
menghasilkan input gaya pada struktur. Transducers berfungsi untuk mengkonversi gerakan mekanik pada struktur ke sinyal electric, signal conditioning. Amplifier untuk mencocokkan karakteristik transducers dengan input elektronik data digital, dan analyzer, di mana terdapat program komputer pemrosesan sinyal dan modal analisis.
Skema penyusunan perangkat tersebut di ilustrasikan pada Gambar 2.12. [17].
Gambar 2.12. Skema Modal Testing [17]
Getaran pada suatu sistem yang akan di tentukan secara eksperimen pada umumnya terdiri dari tiga mekanisme pengukuran : (1) mekanisme eksitasi; (2) mekanisme pembacaan; (3) mekanisme akuisisi data dan pengolahan. Mekanisme eksitasi di tentukan dari sistem yang menyediakan input gerakan terhadap struktur dalam analisis, umumnya berupa gaya yang di berikan pada koordinat tertentu. Mekanisme pembacaan pada dasarnya di gunakan sensing device yang di kenal sebagai force transduces. Banyak variasi dari alat tersebut dan biasanya di gunakan pada eksperimental modal analisys adalah piezoelectric transducers baik untuk mengujur eksitasi gaya (force transducers) atau mengukur respon percepatan (accelerometers) [17].
terlihat frekuensi alami struktur setiap mode yang di asosiasikan dengan frekuensi nilai puncak. Periode getar struktur kemudian dapat ditentukan yang merupakan invers dari frekuensi alaminya terlihat pada Gambar 2.13. [17].
Gambar 2.13. Contoh respon jembatan akibat beban impuls dalam, (a) time domain; (b) frequency domain [17]
Simpangan struktur total merupakan kontribusi dari respon setiap mode (modal displacement). Simpangan kontribusi setiap mode dapat dihitung dengan melalui
integrasi numerik atas persamaan independen. Apabila simpangan untuk setiap mode pada massa tertentu sudah diperoleh maka simpangan total massa yang bersangkutan merupakan superposisi atau penjumlahan dari simpangan tiap-tiap mode tersebut. Simpangan massa yang lain dapat dicari dengan cara yang sama. Berikut contoh modal analisis dari sistem derajat kebebasan banyak (MDOF) yang di modelkan sebagai bangunan geser, dengan menggunakan program MatLab, seperti pada Gambar 2.13. [17].
2.6 MatLab (Matrix Laboratory)
Gambar 2.14. Contoh modal analisis dari sistem derajat kebebasan [17]
Matlab yang merupakan singkatan dari Matrix Laboratory, merupakan bahasa pemrograman yang dikembangkan oleh The Mathwork Inc. yang hadir dengan fungsi dan karakteristik yang berbeda dengan bahasa pemrograman lain yang sudah ada lebih dahulu seperti Delphi, Basic maupun C+ + .
Pada awalnya program aplikasi MATLAB ini merupakan suatu interface untuk koleksi rutin-rutin numerik dari proyek LINPACK dan EISPACK, dan dikembangkan dengan menggunakan bahasa FORTRAN, namun sekarang ini MATLAB merupakan produk komersial dari perusahaan Mathworks, Inc.
Yang dalam perkembangan selanjutnya dikembangkan dengan menggunakan bahasa C+ + dan assembler, (utamanya untuk fungsi-fungsi dasar MATLAB). MATLAB telah berkembang menjadi sebuah environment pemprograman yang canggih yang berisi fungsi-fungsi built-in untuk melakukan tugas pengolahan sinyal, aljabar linier, dan kalkulasi matematis lainnya. MATLAB juga menyediakan berbagai fungsi untuk menampilkan data, baik dalam bentuk dua dimensi maupun dalam bentuk tiga dimensi.
dibutuhkan tidak terlalu sulit bila kita telah memiliki pengalaman dalam pemrograman bahasa lain seperti C, PASCAL, atau FORTRAN.
MATLAB (Matrix Laboratory) yang juga merupakan bahasa pemrograman tingkat tinggi berbasis pada matriks, sering kita gunakan untuk teknik komputasi numerik, yang kita gunakan untuk menyelesaikan masalah-masalah yang melibatkan operasi matematika elemen, matrik, optimasi, aproksimasi dll [18].
2.7 Analisa Vibrasi dengan Fast Fourier Transform(FFT)
Analisa fourier terbagi atas dua yakni deret fourier untuk sinyal periodik dan trasformasi fourier untuk sinyal aperiodik. Setiap sinyal periodik dapat dinyatakan atas jumlah komponen-komponen sinyal sinusoidal dengan frekuensi yang berbeda (distinct). Jika ada sebuah fungsi f(t) yang kontinyu periodik dengan periode T yang bernilai tunggal terbatas pada suatu interval terbatas, dan memiliki diskontinyuitas yang terbatas jumlahnya dalam interval tersebut serta dapat diintegralkan secara mutlak, maka f(t) dapat dinyatakan dengan deret fourier. Dengan menggunakan software komputer, komputasi FFT menjadi lebih mudah dan cepat. Contoh
sederhana FFT pada matlab sebuah fungsi f(t) dari time domain menjadi frequency domain diperlihatkan pada Gambar2.15. [19].
Gambar 2.15.Hasil FFT dari Data Vibrasi [19]
FFT merupakan elemen pemrosesan sinyal pada pengukuran vibrasi. Pada pengukuran vibrasi ada empat tahapan untuk merubah sinyal vibrasi menjadi spektrumnya. Algoritma FFT untuk analisa vibrasi tersebut adalah sebagai berikut:
Sistem akuisisi menghasilkan spektrum yang menunjukkan perbandingan waktu dengan percepatan.
Hasil spektrum diolah menggunakan software lain dengan menggunakan Fast Fourier Transform.
Hasil pengolahan menggunakan FFT akan berupa grafik perbandingan frekuensi dengan amplitudo yang menunjukkan jenis kerusakan dan tingkat kerusakan mesin [19].
2.8 Diagnosa Kerusakan Mesin Melalui Spectrum Analysis
Setiap bagian dari mesin yang berputar mempunyai tingkat vibrasi yang berbeda tergantung pada letaknya dan gaya yang diterima. Tingkat vibrasi inilah yang bisa dijadikan sebagai pendeteksi keadaan dari suatu kondisi mesin apakah ada kerusakan atau tidak. Kerusakan umum yang biasa terjadi pada pompa dan mesin-mesin berputar adalah ketidakseimbangan atau unbalance, misalingment, kerusakan bearing dan mechanical looseness. Kerusakan-kerusakan tersebut dapat dideteksi dari spektrum vibrasi. Kerusakan – kerusakan yang sering terjadi pada mesin berputar yaitu : [19]
a. Unbalance
Unbalance adalah kondisi dimana pusat massa tidak sesumbu dengan sumbu
normal ≥ 80% dari amplitudo keseluruhan ketika masalah dipastikan unbalance terlihat pada Gambar 2.16. [19].
Gambar 2.16. Pola Spektrum Vibrasi Unbalance [19]
b. Misalignment
Ketidaklurusan (misalignment) terjadi ketika frekuensi shaft yang berputar satu kali putaran atau dapat juga terjadi dua dan tiga kali putaran. Normalnya disebabkan adanya getaran yang tinggi pada axial dan radial.
Misalignment terjadi saat getaran yang dihasilkan lebih besar dari keadaan
normal di 2x RPM. Jika misalignment menjadi semakin buruk hal ini dapat disebabkan besarnya nilai harmonik dimana akan menghasilkan spektrum nampak seperti masalah looseness terlihat pada Gambar 2.17.[19].
Gambar 2.17.Pola Spektrum Vibrasi Misalignment [19]
2.9 Metode Lintasan Orbit (Pola Lissajous)
axial. Sehingga rekomendasi pengukuran yang lengkap dengan arah vibrasi axial tidak dapat dilakukan. Untuk non-contact pick up pada umumnya dipasang permanen untuk mendeteksi vibrasi langsung pada shaft mesin-mesin yang penggunaannya cukup kritis, instalasinya berupa probe pada arah radial (horizontal dan vertikal) yang keduanya dipisahkan oleh sudut 90 derajat [20].
Di sini analisa orbit dapat dilakukan, sebagai tambahan untuk analisa spektrum. Para praktisi telah melakukan penelitian mengenai kegunaan metoda orbit (pola Lissajous) dan berhasil mendapat kesimpulan terhadap bentuk bentuk orbit dalam membantu untuk mengidentifikasi status yang tidak normal termasuk tidak seimbangan (Unbalance), tidak sesumbu (misalignment), oil whirl dan oil whip. Bentuk karakteristik pola Lissajous sebagai berikut [20].
1.Unbalance
Suatu keadaan unbalance pada rotary machine ditunjukkan oleh pola Lissajous sebagai vibrasi yang besar pada frekuensi 1 X RPM dengan menganggap bahwa vibrasi pada frekuensi yang lain sangat kecil dan tidak berarti. Bentuknya dapat sedikit agak lonjong (elips) dan di dalam pola yang terbentuk akan terlihat satu bush spot yang menunjukkan bahwa vibrasi yang besar hanya terjadi pada frekuensi 1 X RPM. Gambar pola Lissajousnya dapat terlihat pada Gambar 2.18. [20].
Gambar 2.18. Pola Lissajous pada rotary machine yang unbalance[20]
2.Misalignment
gambar pola Lissajousnya akan memberikan bentuk elips pipih seperti pisang atau bahkan bentuk pisang yang melengkung [20].
Bentuk elips pipih selain memberikan kemungkinan vibrasi yang disebabkan oleh keadaan misalignment, tetapi juga dapat disebabkan oleh kerusakan bearing atau kemungkinan terjadinya resonansi, dapat terlihat pada Gambar 2.19.[20].
Gambar 2.19. Pola Lissajous pads rotary machine yang misalignment [20]
3.Oil Whirl
Misalignment akan menyebabkan vibrasi yang utama pada frekuensi di bawah I X RPM. Di dalam gambar pola Lissajousnya akan memberikan bentuk dua buah lingkaran atau elips yang ditandai dengan adanya dua buah blank spot. Bahkan karena kejadian oil whirl yang di bawah 1 X RPM tidak persis 1/2 X RPM, maka lingkaran atau elips yang lebih kecil akan bergerak dan ditandai dengan bergeraknya blank spot yang ada pada lingkaran atau elips yang kecil, terlihat pada Gambar 2.20.[20].
4. Rubbing (Gesekan)
Gambar 2.21. Pola Lissajous pada rotary machine yang mengalami hit-and-bounce rubbing [20]
Pola semacam ini mirip dengan pola Lissajous yang terjadi pada peristiwa terjadinya oil whirl, hanya bedanya dengan peristiwa oil whirl maka di sini lingkaran yang berada di dalam tidak berputar-putar. Dengan semakin beratnya kondisi rubbing yang terjadi, yaitu yang dinamakan heavy rubbing atau full rubbing, dan ditambah lagi dengan frekuensi resonansi, frekuensi harmonik, serta
random frekuensi non-syncronous, maka akan menghasilkan pola Lissajous yang sangat kompleks seperti ditunjukkan oleh Gambar 2.22. [20].
![Gambar 2.1. Konstruksi turbin angin[8]](https://thumb-ap.123doks.com/thumbv2/123dok/2244269.1231851/2.595.128.501.166.382/gambar-konstruksi-turbin-angin.webp)
![Gambar 2.2. Turbin angin sumbu vertical[9]](https://thumb-ap.123doks.com/thumbv2/123dok/2244269.1231851/4.595.113.513.367.529/gambar-turbin-angin-sumbu-vertical.webp)
![Gambar 2.3. Teori A. Betz[10]](https://thumb-ap.123doks.com/thumbv2/123dok/2244269.1231851/5.595.206.418.407.523/gambar-teori-a-betz.webp)
![Gambar 2.5.Bentuk rotor[11]](https://thumb-ap.123doks.com/thumbv2/123dok/2244269.1231851/6.595.120.557.560.731/gambar-bentuk-rotor.webp)
![Gambar 2.7.[12]](https://thumb-ap.123doks.com/thumbv2/123dok/2244269.1231851/8.595.257.365.435.547/gambar.webp)
![Gambar 2.8. Sistem Getaran Sederhana[15]](https://thumb-ap.123doks.com/thumbv2/123dok/2244269.1231851/11.595.161.459.88.230/gambar-sistem-getaran-sederhana.webp)
![Gambar 2.9. Beda fasa antara perpindahan, kecepatan, dan percepatan[15]](https://thumb-ap.123doks.com/thumbv2/123dok/2244269.1231851/12.595.191.440.359.517/gambar-beda-fasa-antara-perpindahan-kecepatan-dan-percepatan.webp)
![Gambar 2.11.ISO 10816-3 Untuk Vibrasi [16]](https://thumb-ap.123doks.com/thumbv2/123dok/2244269.1231851/14.595.120.511.86.348/gambar-iso-untuk-vibrasi.webp)
![Gambar 2.12. Skema Modal Testing [17]](https://thumb-ap.123doks.com/thumbv2/123dok/2244269.1231851/15.595.173.451.197.389/gambar-skema-modal-testing.webp)
