APLIKASI LABVIEW PADA OTOMASI KEMUDI PADA TRAKTOR 4 RODA
(Studi Kasus KUBOTA B 6100)
LabVIEW application of automation 4 wheel tractor steering performance
(KUBOTA B 6100 Case Study)
Muhammad Sjahrul Annas
Jurusan Teknik Mesin, Fakultas Teknologi Industri Universitas Trisakti
Jl. Kyai Tapa, Grogol, Jakarta Barat 11440 e-mail: [email protected], hp: 081310505255
Eduard Namaken Sembiring1), Radite Praeko Agus Setiawan2), Bambang Pramudya3) Departemen Teknik Pertanian, Fakultas Teknologi Pertanian
Institut Pertanian Bogor Kampus Darmaga Bogor 16680
1) e-mail: [email protected] 2) e-mail: [email protected] 3) e-mail: [email protected]
Abstrak
Otomasi merupakan suatu keharusan pada hampir setiap perangkat. Otomasi telah menjadi revolusi dalam bidang industri. Penelitian ini sebagai perancangan awal otomasi traktor 4 roda, yang bertujuan mengidentifikasi beberapa parameter utama sistim kemudi traktor diantarnya: dimensi utama traktor, torsi belok, besar sudut belok maksimum roda depan pada saat belok ke kiri dan kanan, dan perbandingan besar putaran roda kemudi terhadap sudut belok roda depan. Letak posisi yang tepat untuk menempatkan sensor posisi roda depan traktor menggunakan potensiometer, hal tersebut untuk mengurangi simpangan-simpangan yang mungkin terjadi karena kausan pada mekanisme sistim kemudi. Pengolahan data sesuai instruksi untuk kerja motor penggerak roda kemudi melalui perintah Ni-DAQ kemudian ke motor driver yang memerintahkan arah dan kecepatan putar motor penggerak roda kemudi. Traktor dapat mengikuti lintasan yang direncanakan dengan simpangan berkisar 3,8 cm dikarenakan kondisi permukaan dan kemiringan permukaan jalan tidak rata, belubang-lubang kecil dan kondisi cahaya lingkungan dimana sensor yang digunakan bekerja dengan pantulan cahaya infra merah untuk kondisi lingkungan dengan intensitas cahaya yang sangat besar sangat mempengaruhi kerja dari sensor.
Keywords:LabVIEW,
automation, tractor steering, simulation
PENDAHULUAN
Sistem kontrol kendaraan pertanian mendapat perhatian kalangan peneliti lebih dari lima puluh tahun. Kebutuhan Agar operator tidak selalu harus memutar stir ketika menggunakan perlengkapan tambahan merupakan alasan yang sering disebutkan bagi digunakannya sistim pengendalian (Wilson, 2000). Kontroler pengendalian menentukan perintah penyetiran sesuai dengan bentuk traktor.
Kontrol kemudi merupakan kombinasi hidrolik dan komponen elektronik yang menyebabkan roda stir berputar sesuai keinginan. Secara sederhananya, sistim pengendalian menentukan bentuk traktor saat ini dan melakukan pengontrolan stir untuk mengarahkan traktor ke bentuk yang diinginkan.
Proses penyetiran mengikuti instruksi yang diberikan oleh alat pengendali secara monoton dan melelahkan operator maka dikembangkanlah sistim pengontrolan stir otomatis (Chateau et al.,
METODOLOGI Tempat Penelitian
Penelitian ini dilakukan di Labolatorium Lapang, Departemen Teknik Pertanian, Fakultas Teknologi Pertanian, Institut Pertanian Bogor.
Alat dan Bahan Penelitian
Peralatan yang perlukan dalam penelitian ini adalah:
1. Traktor 4 roda Kubota B6100 dengan penggerak 4 roda 16 Hp
2. Komputer Laptop Pentium IV untuk mengatur gerakan, merekam, menyimpan, dan mengolah data dengan batuan perangkat lunak LabVIEW
3. Penghitung kecepatan (rotary encoder), di pasang pada kedua roda belakang traktor untuk mengetahui kesamaan gerak traktor.
4. Bahan pendukung lainnya seperti: kabel yang menghubungkan antar instrumen yang di gunakan, digital tachometer, stop watch, multi tester, kamera, solder dan lain-lain
5. Motor DC beserta drivernya sebagai penggerak roda kemudi.
6. Sepasang puli sabuk bergigi beserta sabuk bergiginya untuk menggerakkan secara mekanisme poros roda kemudi oleh motor DC.
7. Potensio meter, sensor posisi sudut belok roda depan traktor. 8. Proximty Detector Sensor yang berguna sebagai penjejak garis.
9. Ni-DAQ, sebagai pengolah data akuisisi dan penghubung antar komputer dengan, Proximity sensor, potensio meter dan motor driver
Tahapan Penelitian
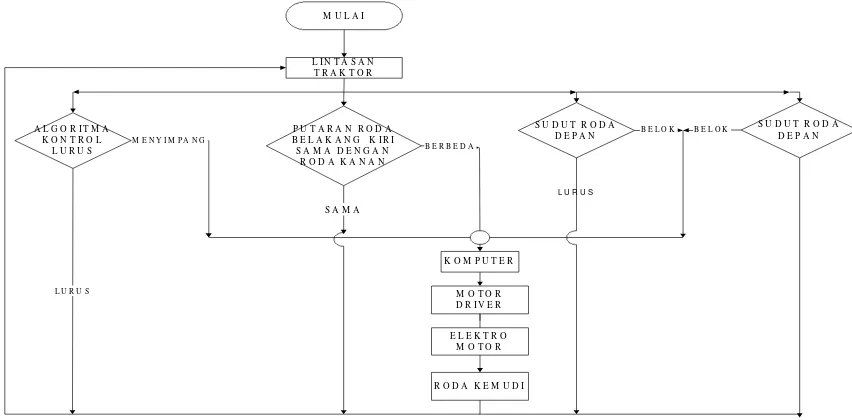
Tahapan penelitian awal (Gambar 1) adalah: (1) mengukur dimensi roda depan dan belakang traktor, (2) mengukur jarak serta panjang sumbu antar roda, (3) mengukur besarnya sudut belok maksimal ke kiri dan kanan roda depan traktor pada dua kondisi yaitu saat menyentuh dan tidak permukaan, dan (4) menghitung perbandingan putaran roda kemudi dan besar sudut belok yang terjadi pada roda depan. Gambar 2 menunjukkan diagram alir gerak roda kemudi yang dilakukan pada penelitian.
Gambar 1. Diagram alir control lurus
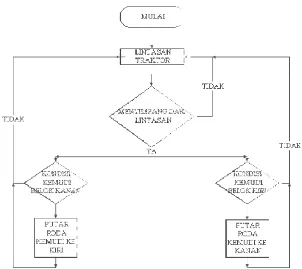
Gambar 2. Diagram alir gerak roda kemudi
Selanjutnya membuat suatu rancangan alternatif posisi traktor yang diperlukan untuk mengetahui berbagai posisi yang akan terjadi pada saat traktor melintas pada lintasan utama. Hal tersebut penting untuk mengatahui aksi kontrol apa yang harus dilakukan, bila traktor menyimpang dari lintasan. Penelitian secara garis besar di bagi menjadi beberapa tahapan yang terdiri dari:
1. Tahap persiapan, adalah tahapan awal sebelum proses penelititan dilakukan, pekerjaan pada tahapan ini adalah:
a. Kondisi traktor, yaitu mempersiapkan kondisi traktor yang akan di pakai untuk penelitian, seperti melihat sistim kemudi, sistim kelistrikan, dan sistim lainnya sehingga dapat di pastikan traktor berfungsi dengan baik.
Pada tahap persiapan ini diadakan beberapa pengujian untuk mengatahui parameter dasar yang di perlukan seperti menguji besarnya sudut belok dan torsi pada roda kemudi pada saat traktor belok pada beberapa permukaan sentuh. Hal ini penting untuk mengetahui besarnya dimensi motor penggerak yang di perlukan dan rasio puli yang di pakai untuk mendapatkan keuntungan mekanis pada sistem ini.
b. Persiapan konstruksi, persiapan ini adalah tahapan dimana traktor mengalami proses modifikasi secara konstrusi untuk digerakkan oleh motor DC secara otomasi, persiapan yang dilakukan diantaranya adalah:
i. Menentukan dan menyiapkan posisi puli penggerak roda kemudi pada poros roda kemudi
ii. Menyiapkan konstruksi dudukan motor DC, dimana porosnya sejajar dengan poros roda kemudi, sehingga kedua puli dapat di hubungkan dengan belt bergigi, pada pengujian ini digunakan sistim bergigi untuk mereduksi slip sehingga tingkat akurasi dapat di capai
i. Menentukan dimensi motor sesuai dengan hasil pengamatan di atas beserta driver untuk motor di maksud
ii. Setelah kedua hal di tentukan, maka dibuat program komputer untuk menjalankan motor tersebut. Program yang dibuat memiliki karakteristik variasi arah dan kecepatan putar motor.
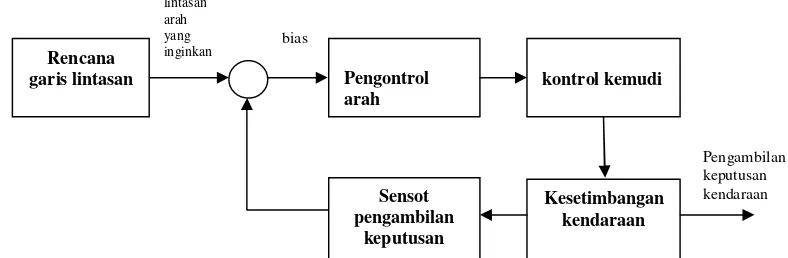
Skema diagram dari alur sinyal untuk petunjuk kendaraan otomatis ditunjukkan pada Gambar 3.
Gambar 3. Diagram alur sinyal untuk petunjuk kendaraan otomatis
HASIL DAN PEMBAHASAN
Hasil pengukuran dimensi traktor Kubota B6100 menunjukkan bahwa: besar diameter roda depan 12 inci, diameter roda belakang 14 inci, lebar sumbu untuk roda depan sebesar 75 cm dan 80 cm untuk roda belakang. Adapun untuk jarak antar sumbu roda depan dan belakang sejauh 125 cm.
Tahapan pertama adalah melihat kondisi sistim kemudi traktor dilanjutkan dengan menentukan sistim penggerak roda kemudi dan posisinya. Pada tahapan ini ada babarapa data yang di perlukan yaitu besarnya sudut belok, dan besarnya beban roda kemudi pada beberapa permukaan. Berdasarkan data hasil penelitian pendahuluan maka di pilih motor DC menggerakkan poros roda kemudi, adapun media geraknya dengan menggunakan sabuk bergigi (timing belt)
Tahapan kedua yang di lakukan ialah dengan mencari letak posisi yang tepat untuk menempatkan sensor posisi roda depan traktor dalam hal ini di pilih potensiometer (Gambar 4). Penentuan tersebut penting untuk mengurangi simpangan-simpangan yang mungkin terjadi karena kausan pada mekanisme sistim kemudi dimana dipilih posisi satu poros dengan poros putar roda depan traktor. Potensiometer merupakan jenis sensor yang didasarkan pada resistor variabel yang nilainya berubah sesuai dengan posisi poros nya. Ada banyak jenis potensiometer tersedia termasuk rangkaian tunggal dan ganda. Posisi potensio mengukur tegangan analog antara bagian bergerak dengan salah satu bagian terluar dari potensiometer. Resolusi sensor tersebut tergantung pada kualitas perangkat, level noise elektronik yang ada dan jumlah digit yang digunakan oleh konverter analog ke digital. Alat ini secara umum dikategorikan sebagai sensor presisi rendah yang digunakan pada aplikasi terendah atau dua preposisi sensor inkremental resolusi tinggi. Sensor perpindahan rotasi menghasilkan data navigasi dari rotasi roda.
Gambar 4. Potensiometer sebagai sensor sudut belok roda depan
Tahap ketiga adalah penentuan sensor yang akan di pakai untuk memandu kelurusan gerak traktor sesuai dengan lintasan yang diinginkan. Dalam hal ini dipilih Proximty Detector Sensor
seperti tampak pada Gambar 5. Tugas titik ke titik adalah persoalan input dengan dua input dan Kondisi i terkontrol. Tugas penelusuran lintasan adalah persoalan input–output dengan satu input dan satu output terkontrol, yang berarti kontrol tak langsung kondisi i-1. Tugas lintasan (trajectory) juga merupakan persoalan input output dengan dua input dan dua output terkontrol, yang berarti kontrol tak langsung kondisi i. Hasilnya, tugas gerakan titik ke titik merupakan persoalan tersulit sebab i variable independen harus dikontrol hanya dengan dua input. Tugas penelusuran lintasan dan lintasan (trajectory) mepunyai tingkat kesulitan yang sama, yaitu persoalan kontrol merata (sama jumlah input kontrol dan variabel terkontrol).
Gambar 5. Sensor infrared yang digunakan pada awal penelitian
Gambar . Diagram DAQ 6008 dan IRP detector serta foto instalasi motor driver dan ADC-DAC jenis Ni-DAQ 6008
Pengolahan data sesuai instruksi untuk kerja motor penggerak roda kemudi melalui perintah Ni-DAQ kemudian ke motor driver yang memerintahkan arah dan kecepatan putar motor penggerak roda kemudi.
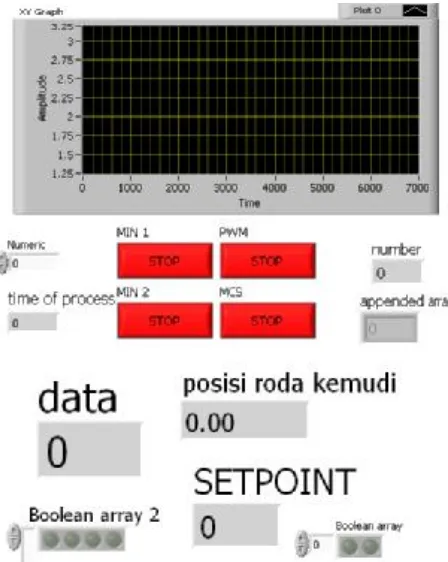
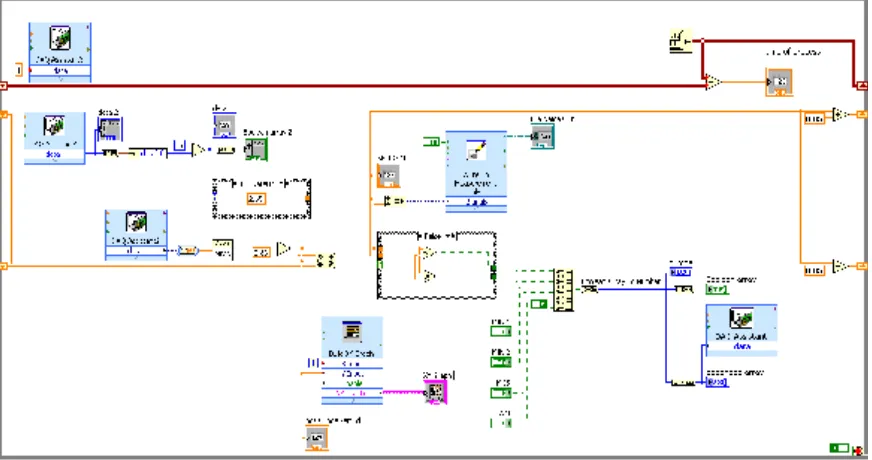
Langkah berikutnya menghubungkan seluruh perangkat diatas dengan menggunakan komputer, dalam hal ini di gunakan perangkat lunak LabVIEW sebagai pemandunya. Data hasil simulasi tren lintasan traktor dengan menggunakan LabVIEW 8.0 pada Gambar 6 di bawah ini. Sedangkan blok diagram program sistim kemudi traktopada LabVIEW 8.0 diperlihatkan pada Gambar 7
Gambar 6. Front panel program sistim kemudi traktor
Gambar 8. Blok diagram program sistim kemudi traktor menggunakan sensor proximity
Gambar 8. Gerakan traktor dapat mengikuti lintasan lurus sepanjang 13 meter dan berbelok dengan jari-jari 500 cm yang.
karena kausan pada mekanisme sistim kemudi.
2. Pengolahan data sesuai instruksi untuk kerja motor penggerak roda kemudi melalui perintah Ni-DAQ kemudian ke motor driver yang memerintahkan arah dan kecepatan putar motor penggerak roda kemudi
3. Traktor dapat mengikuti lintasan yang direncanakan dengan simpangan berkisar 3,8 cm dikarenakan kondisi permukaan dan kemiringan permukaan jalan tidak rata, belubang-lubang kecil dan kondisi cahaya lingkungan dimana sensor yang digunakan bekerja dengan pantulan cahaya infra merah untuk kondisi lingkungan dengan intensitas cahaya yang sangat besar sangat mempengaruhi kerja dari sensor.
DAFTAR PUSTAKA
Chateau, T., Debain, C., Collange, F., Trassoudaine, L. and Alizon, J., 2000. Automatic guidance of agricultural vehicles using a laser sensor. Computers and Electronics in Agriculture, 28(3), 243-257.
Reid, J.F. and Niebuhr, D.G., 2001. Driverless tractors: Automated vehicle navigation becomes reality for production agriculture. Resource Magazine, 8(9), 7-8.
Reid, J.F., Zhang, Q., Noguchi, N. and Dickson, M., 2000. Agricultural automatic guidance research in North America. Computers and Electronics in Agriculture, 25(1-2), 155-167.
Schafer, R.L. and Young, R.E., 1979. An automatic guidance system for tractors. Transactions of the ASAE, 22(1), 46-49, 56.
Tillet, N.D., 1991. Automatic guidance sensors for agricultural machine: a review. J. Agric. Eng. Res. 50, 167–187.
Torii, T., 2000. Research on autonomous agriculture vehicles in Japan. Computers and Electronics in Agriculture, 25(1-2), 133-153.