(Studi Kasus Traktor Mini Empat Roda)
MUHAMMAD SJAHRUL ANNAS
SEKOLAH PASCASARJANA
INSTITUT PERTANIAN BOGOR
BOGOR
Dengan ini saya menyatakan bahwa disertasi otomasi kemudi pada traktor 4 roda menggunakan labVIEW dan RTK-DGPS (studi kasus traktor mini empat roda) adalah karya saya dengan arahan komisi pembimbing dan belum diajukan dalam bentuk apa pun kepada perguruan tinggi manapun. Sumber yang berasal atau dikutip dari karya yang diterbitkan maupun yang tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir disertasi ini.
Bogor, Januari 2012
MUHAMMAD SJAHRUL ANNAS. Steering Automation on 4 Wheels Tractor using LabVIEW and RTK-DGPS (Case Study: 4 Wheels Mini Tractors). Under Supervision of E. NAMAKEN SEMBIRING, RADITE P.A. SETIAWAN, BAMBANG PRAMUDYA.
Automation has an important embedded function provided in almost all devices and recently becomes a revolutionary function to agricultural machinery. This research deals with the development of 4 wheels tractor’s steering automation prototype. Identification of principal parameters on tractor steering has been done, i.e. torque inflection, left and right maximum inflection angle of front wheel and steering rotation angle to front wheel inflection ratio. Proximity sensor to sense straight-line trajectory and potentiometer to sense inflection angle of front wheel were used, which are objected as feedback for steering control position. All hardware data acquisition were done through Ni-DAQ hardware interface. Data were processed with labVIEW to instruct the motor driver related to change of direction and speed of steering wheel. The result of the experiments showed that steering control based on proximity sensor gave unsatisfied performance. Maximum deviation on the asphalt straight-line trajectory reached the largest deviation of 6.8 cm outer and 6.1 cm inner. Turn right test at the trajectories, resulted the largest deviation at 4.5 cm outer and 7.0 cm inner, whereas turn left test resulted the largest deviation of 6.2 cm outer and 7.2 cm inner. Steering automation performance of RTK-DGPS testing results Steering automation performance of RTK-DGPS testing results on the asphalt path the deviation occurs, the right path of 223 cm, while the left path as far as 89 cm. The results of the land right deviation of 171 cm, while the left side as far as 415 cm while testing using plow implement. deviations occur for the right and left by 75 cm by 11 cm. While in the second test occurred deviation of 123 cm on the right, while on the left by 56 cm.
Roda Menggunakan LabVIEW dan RTK-DGPS (Studi Kasus Traktor Mini Empat Roda), di bawah bimbingan E. NAMAKEN SEMBIRING, RADITE P. A. SETIAWAN, BAMBANG PRAMUDYA.
Otomasi merupakan suatu keharusan pada hampir setiap perangkat dan telah menjadi revolusi dalam bidang industri. Otomasi yang dikembangkan dalam penelitian ini menggunakan bantuan program LabVIEW. Program dimaksud dapat digunakan untuk mendisain suatu sistem menyerupai bentuk sistem aslinya, melakukan pengamatan dengan hasil yang maksimal dan mengontrol suatu aplikasi dengan programmable automation controllers. LabVIEW menggunakan metode dataflow programming dimana alur data melalui berbagai ikon akan menentukan urutan eksekusi dari setiap instruksi. Penggunaan LabVIEW dalam penelitian ini adalah untuk otomatisasi dan pengumpulan data pengujian suatu traktor 4 roda. Diagram yang digunakan merupakan siklus tertutup melalui intrerpolator yang kemudian merespon perintah program asli yang berisi serangkaian instruksi dengan faktor koreksi yang didapat dari algoritma sebelumnya. Pada traktor prinsip otomasinya adalah dengan mengenali objek sasaran, mendekatinya secara perlahan secara presisi, kemudian berhenti pada posisi yang diinginkan
Parameter utama sistim kemudi traktor diantaranya adalah dimensi utama traktor, torsi belok, besar sudut belok maksimum roda depan pada saat belok ke kiri dan kanan, dan perbandingan besar putaran roda kemudi terhadap sudut belok roda depan. Pengukuran parameter tersebut dilakukan pada traktor mini penggerak 4 roda secara manual menggunakan alat ukur panjang dan besar sudut. Besar sudut belok maksimum untuk arah kiri dan kanan pada saat menyentuh permukaan adalah sebesar 32°, dan 48° pada saat tidak menyentuh permukaan. Di samping itu, didapat 26 posisi traktor yang mungkin terjadi pada lintasan beserta aksi roda kemudinya. Hasil pengujian menunjukkan bahwa sumbu dan diameter roda depan lebih kecil dibandingan dengan roda belakang karena beban traksi roda belakang jauh lebih besar dibanding dengan roda depan. Selain itu, karena kemudi yang sudah tidak sesuai dengan kondisi aslinya dan usia traktor yang sudah cukup tua, maka besar speling yang terjadi harus diantisipasi.
kemudi. Traktor dapat mengikuti lintasan yang direncanakan.
Sistim otomasi traktor dapat mengurangi kelelahan operator memilliki peranan penting pada abad mendatang, terutama sistim kendaraan yang menghasilkan kerja lebih effisien dan mengurangi biaya produksi. Posisi absolut dari penerima GPS ditentukan menggunakan teknik triangulasi sederhana berdasarkan waktu tempuh sinyal radio yang secara unik dikodekan dari satelit. Masalah utama dari sistem GPS meliputi: i) waktu sinkronisasi antara satelit dan penerima, ii) lokasi real time satelit yang tepat, iii) sulit untuk mengukur waktu propagasi sinyal iv) noise elektromagnetik dan pengaruh lain seperti penyumbatan sinyal periodik oleh pohon-pohon dan bangunan saat platform pengujian bergerak di bawah atau di dekat pohon-pohon atau bangunan. Aplikasi RTK-DGPS pada traktor 4 roda yang digunakan dalam pengujian masih menggunakan Lab VIEW. Hasil pengujian di lintasan aspal, terjadi simpangan, arah kanan lintasan sebesar 223 cm, sedang arah kiri lintasan sejauh 89 cm. Hasil dilahan simpangan sebelah kanan sebesar 171 cm, sedang sabelah kiri sejauh 415 cm sedangkan pengujian dengan menggunakan implement bajak singkal. terjadi simpangan untuk sebelah kanan sebesar 75 cm dan kiri sebesar 11 cm. Sedangkan pada pengujian kedua terjadi simpangan sebesar 123 cm disebelah kanan, sedangkan disebelah kiri sebesar 56 cm.
©Hak cipta milik IPB, tahun 2012
Hak cipta dilindungi
Dilarang mengutip sebagian atau seluruh karya tulis ini tanpa mencantumkan atau menyebutkan sumbernya. Pengutipan hanya untuk kepentingan pendidikan, penelitian, penulisan karya ilmiah, penyusunan laporan, penulisan kritik atau tinjauan suatu masalah, dan pengutipan tersebut tidak merugikan kepentingan yang wajar IPB.
MENGGUNAKAN LABVIEW DAN RTK-DGPS
(Studi Kasus Traktor Mini Empat Roda)
MUHAMMAD SJAHRUL ANNAS
Disertasi
sebagai salah satu syarat untuk memperoleh geler Doktor pada Program Studi Ilmu Keteknikan Pertanian
SEKOLAH PASCASARJANA
INSTITUT PERTANIAN BOGOR
Penguji pada Ujian Tertutup: Dr. Ir. I Made Dewa Subrata, MAgr
(Dosen Departemen Teknik Mesin dan Biosistem, FATETA IPB)
Dr. Ir. Irmansyah, MSi
(Dosen Departemen Fisika, FMIPA, IPB)
Penguji pada Ujian Terbuka : Dr. Ir. Wawan Hermawan, MS
(Dosen Departemen Teknik Mesin dan Biosistem, FATETA IPB)
Dr. Mahfudz Al Huda, M Eng
Empat Roda)
Nama : Muhammad Sjahrul Annas
NRP : F161020061
Program Studi : Ilmu Keteknikan Pertanian
Disetujui:
Komisi Pembimbing
Dr. Ir. E. Namaken Sembiring, M.S. Ketua
Dr. Ir. Radite P. A. Setiawan, M.Agr. Prof Dr. Ir. Bambang Pramudya, M.Eng.
Anggota Anggota
Diketahui:
Ketua program Studi Dekan Sekolah Pascasarjana
Ilmu Keteknikan Pertanian
Dr. Ir. Wawan Hermawan, M.S. Dr. Ir. Dahrul Syah, M.Sc.Agr.
Puji dan syukur penulis panjatkan ke hadirat Allah SWT yang telah mencurahkan rahmat dan hidayah-Nya, sehingga penulis dapat menyusun hasil penelitian ini sebagai disertasi yang berjudul ” Otomasi Kemudi Pada Traktor 4 Roda Menggunakan LabVIEW dan RTK-DGPS (Studi Kasus Traktor Mini Empat Roda)”.
Terimakasih penulis ucapkan kepada: Dr. Ir. E. Namaken Sembiring, MS (Ketua Komisi Pembimbing), Dr. Ir. Radite P.A. Setiawan, M.Agr, dan Prof. Dr. Ir. Bambang Pramudya, M.Eng (Anggota Komisi Pembimbing) yang telah memberikan bimbingan dalam penelitian ini.
Terimakasih juga saya sampaikan kepada:
1. Dekan Sekolah Pascasarjana, Institut Pertanian Bogor
2. Ketua program Studi Ilmu Keteknikan Pertanian, Institut Pertanian Bogor 3. Rektor Universitas Trisakti Jakarta
4. Dekan Fakultas Teknologi Industri ,Universitas Trisakti 5. Ketua Jurusan Teknik Mesin, Universitas Trisakti
6. Dirjen Dikti, Kementrian Pendidikan Nasional yang telah memberikan beasiswa BPPS kepada penulis untuk mengikuti studi program doktor pada Institut Pertanian Bogor.
7. P r o gr a m H i b a h P e n e l i t i a n M a h a s i s w a P r o g r a m D o k t o r t a h u n 2 0 0 9 , P r o gr a m P a s c a s a r j a n a , In s t i t u t P e r t a n i a n Bo go r ( IP B) . 8. Staf Bagian Teknik Mesin Budidaya Pertanian, Departemen Teknik Mesin
dan Biosistem, Institut Pertanian Bogor
9. Direktur PT. Almega Geosystem yang telah memberikan bantuan alat sehingga dapat dilaksanakannya penelitian di dalam disertasi ini,
kakak atas dorongan materiil dan spirituil semangat yang diberikan untuk menyelesaikan studi doktoral ini.
Bogor, Januari 2012
Penulis dilahirkan di Bandung pada tanggal 3 Juli 1967 sebagai anak pertama dari dua bersaudara dari pasangan Ir. H. Mohammad Sjah Hasni (alm) dan Hj. Annasih, BA.
Penulis menempuh pendidikan sarjana di jurusan Teknik Mesin di Universitas Trisakti lulus pada tahun 1993. Pada tahun 1996 penulis diterima di Program Magister Jurusan Teknik Mesin Universitas Indonesia dan menamatkannya pada tahun 1998. Kesempatan untuk melanjutkan ke program doktor pada Program Studi Ilmu Keteknikan Pertanian diperolah pada tahun 2002 dengan beasiswa BPPS dari DIKTI.
Penulis bekerja sebagai dosen di Fakultas Teknologi Industri jurusan Teknik Mesin Universitas Trisakti sejak tahun 1995.
Selama mengikuti program S3, penulis menulis artikel berjudul Pengukuran Torsi Roda Traksi Pada Model Bak Uji pada Seminar Nasional PERTETA tahu 2005 di Bandung. Disamping itu artikel lain berjudul Otomasi Kemudi Pada Traktor 4 Roda Menggunakan LabVIEW dan RTK-DGPS (Studi Kasus Kubota B 6100) akan diterbitkan Jurnal Keteknikan Pertanian. Karya ilmiah terakhir merupakan bagian dari program S3 penulis.
DAFTAR TABEL……….. xv
DAFTAR GAMBAR……….. xvi
DAFTAR LAMPIRAN……….. xx
PENDAHULUAN Latar Belakang……….. 1
Tujuan Penelitian………... 3
Manfaat Hasil Penelitian……….... 3
Pendekatan Masalah...……….... 4
Kebaruan (Novelty) ...……….... 4
TINJAUAN PUSTAKA Konsep Otomatisasi Traktor Pertanian………..……..……….. 7
Kontrol Gerak Non-holonomik ………... 8
Kontrol Dengan Umpan Balik………...………….. 10
Pengaruh Slip Pada Kontrol Steering……… 12
Sensor Untuk Pengidera………. 13
METODE PENELITIAN Alat dan Bahan Penelitian……….………... 25
Tahapan Penelitian…..………... 26
HASIL DAN PEMBAHASAN Karakteristik Sistem Kemudi Traktor dan Modifikasi Kontrol Otomatis Sistem Kemudi…..…….……….. 33
Sistem Kontrol Kemudi pada Traktor 4 Roda dan membangun protip perangkat pengontrol kemudi traktor secara mekatronis…..……... 35
Analisa dan Kinerja Lapangan terhadap Prototip pada Lintasan Uji …… 38
Kinerja Penggunaan RTK-DGPS pada Otomasi Kemudi Traktor 4 Roda 40 KESIMPULAN dan SARAN ………..……… 49
DAFTAR PUSTAKA……….……. 51
Hal.
1 Deskripsi $GPGGA... 17
2 Deskripsi $GPGLL... 17
3 Deskripsi $GPGSA ………..………... 18
4 Deskripsi $GPVTG. ……….………... 18
5 Deskripsi $GPGSV ……….... 19
6 Deskripsi $GPRMC ……….……….. 20
Hal. 1 Kerangka konseptual pendekatan masalah dan tahapan penelitian
otomatik kemudian traktor empat roda (Kubota B6100) dengan
panduan RTK-RGPS... 5
2 Dasar dari arah pembacaan untuk suatu mobil otomatis beroda... 8
3 Konsep pergerakan robot beroda………..………... 10
4 Model kendaraan kendali diferensial. ……….………... 10
5 Suatu model kinematik dari suatu kendaraan automasi………... 10
6 Elemen dasar suatu sistem kendaraan automasi pertanian ……….… 13
7 Elemen dasar sistem kendaraan pertanian otonom………. 18
8 Sistem pembuatan pola pada jalan aspal dan sistim monitoring permukaaan kasar pada suatu implement yang terubung dengan pengangkat three point hitch……..……….………… 20
9 Traktor uji untuk suatu kendaraan otomasi ………... 21
10 Posisi awal sudut α dan β terhadap traktor .……….…... 27
11 Posisi ke n dengan sudut αn dan βn 27 ….………..………...….. 12 Traktor 4 roda yang di gunakan………... 29
13 Diagram alir kontrol lurus………... 29
14 Suatu diagram alur sinyal untuk petunjuk kendaraan automasi…... 31
15 Komponen pada Algoritma Kontrol Lurus………..…... 32
16 Letak posisi sensor pada traktor tampak samping dan atas..………... 33
17 Tampilan data hasil simulasi pergerakan traktor dan lintasan traktor hasil simulasi dengan labVIEW………... 35
18 Blok diagram dari simulasi dengan LabVIEW 35 19 Pengujian simulasi kontrol pada kemudi traktor 4 roda Kubota B6100………... 36
20 A) batang roda kemudi di gerakkan oleh motor DC dengan bantuan sabuk bergigi, B) rotary encoder, sensor kecepatan maju traktor, C) absolut rotary encoder, sensor sudut belok traktor, D) Potensiometer sebagai sensor sudut belok roda depan……….... 37
23 Potensiometer sebagai sensor sudut belok roda depan………... 40 24 Sensor infrared yang digunakan pada awal penelitian….…………... 41 25 Diagram DAQ 6008 dan IRP detector serta foto instalasi motor
driver dan ADDA jenis Ni-DAQ 6008………... 42 26 Front panel program sistim kemudi traktor………..………... 43 27 Blok diagram Blok diagram program sistim kemudi traktor
menggunakan sensor proximity ………...…... 43 28 Gerakan traktor dapat mengikuti lintasan lurus sepanjang 13 meter
dan berbelok dengan jari-jari 500 cm yang. ………... 44 29 Front panel program sistim kemudi traktor……….…... 45 30 Blok diagram program sistim kemudi traktor menggunakan
RTK-DGPS………... 45
31 Foto aplikasi RTK-DGPS pada traktor 4 roda Kubota B6100……... 47 32 A) besar sudut belok kiri, B) besar sudut belok kanan keduanya saat
menyentuh permukaan lintasan………... 48 33 Besar torsi belok traktor pada berbagai macam permukaan…….…... 48 34 Sensor Proximity untuk mendeteksi garis………... 49 35 Perangkat yang di hubungkan ke system akuisisi A) batang roda
kemudi di gerakkan oleh motor DC dengan bantuan sabuk bergigi, B) Potensiometer sebagai sensor sudut belok roda depan…………...
49 36 Gerakan traktor mengikuti lintasan lurus dan berbelok………... 51 37 Front panel program sistim kemudi traktor dengan panduan
Hal. 1 Data kadar air tanah pada bagian-bagian strip olah tanah terbatas
di lahan penelitian (menggunakan metode gravimetri)………….. 142 2 Pengukuran nilai hambatan (k ohm)memekai gypsum blok
elektrode di strip olah tanah terbatas……… 150 3 Analisis sidik ragam perhitungan rancangan percobaan………... 154 4 Analisis fisika tanah di Laboratorium……….….. 160 5 Data suhu harian di dalam naungan plastic………... 164 6 Analisis data konduktivitas horizontal……….. 165 7 Analisis data konduktivitas horizontal: konversi dari difusivitas ke
konduktifitas hidrolik……… 167
8 Program DAQ – Visual C++ 6.0………... 169 9 Program pergerakan kadar air pada strip olah tanah terbatas
beririgasi bawah permukaan (visual basic editor: macros Ms.
Excel)………..…... 172
PENDAHULUAN
Latar Belakang
Suatu operasi pertanian saat ini menuntut kemampuan kinerja dengan ketelitian tinggi serta perbaikan produktivitas yang terus meningkat. Upaya yang dilakukan diantaranya melalui aplikasi sistem pengendalian mesin secara otomatis guna meminimalkan penggunaan waktu serta meminimalkan kejemuan suatu pekerjaan dalam operasi pertanian. Aplikasi sistem cerdas dengan memanfaatkan penginderaan jarak jauh dan teknologi informasi dapat meningkatkan efisiensi, kecepatan, ketelitian dalam proses produksi. Sistem ini meliputi pengontrol navigasi, kemudi otomatis, pengendalian posisi traktor dan implemennya menggunakan DGPS, dan sistim sensor untuk pengenalan lingkungan.
Konsep otomasi robotik pada kendaraan sudah banyak diteliti sejak 50 tahun yang lalu. Pengoperasiannya mencakup berbagai bidang industri, militer dan pertanian, dengan berbagai tujuan dan penggunaan. Pada pemanfaatan robotika di sektor industri, sebuah robot industri merupakan manipulator kendali otomatis dengan tiga atau lebih sumbu yang tetap atau bergerak di dalam ruangan (indoor). Robot industri biasanya berbentuk mobil, dimana standar navigasi kontrolnya dapat dengan mudah dilakukan karena lingkungannya terstruktur. Berbeda dengan pemanfaatan robotika di sektor industri, untuk aplikasi pada bidang pertanian robot yang digunakan harus dapat mengadaptasi lingkungan alam seperti lahan pertanian dan ruas jalan (Morimoto 2003). Keberhasilan aplikasi sistem tersebut di lingkungan lahan pertanian dipengaruhi berbagai faktor seperti slip roda penggerak, lintasan yang tidak rata atau bergelombang, serta kondisi lingkungan (hujan, asap, dan kabut). Hal tersebut menunjukkan bahwa jenis sensor untuk kendali kendaraan pertanian tergantung pada status lapangan.
otomasi harus tetap dilakukan untuk mengikuti perkembangan ilmu pengetahuan dan mengantisipasi sistim pertanian masa depan.
Otomasi sistem kemudi traktor merupakan upaya untuk meningkatkan efisiensi pengolahan lahan pertanian. Otomasi tersebut dapat mengurangi kerja operator traktor dan dapat mengontrol pola pengolahan lahan melalui jalur lintasan yang harus dilalui traktor secara mudah. Sistem kontrol yang tepat dan akurat sangat dibutuhkan agar sistem kemudi traktor 4 roda dapat dikendalikan dengan baik. Sampai saat ini sistem kontrol untuk kemudi traktor yang akan diterapkan untuk pengolahan tanah masih belum dikembangkan di Indonesia. Oleh karena itu, penelitian otomasi traktor pertanian khususnya sistem kontrol kemudi pada traktor 4 roda perlu dilakukan.
Program otomasi di masa depan akan menjadi satu pada sistim jaringan dimana kendaraan dapat berkomunikasi langsung dengan jaringan komputer. Pemantauan kondisi mesin, kontrol dan data dapat diperoleh langsung di lapangan. Jalur lintasan yang dilewati dapat diketahui pada saat yang bersamaan dengan saat melintasnya (real time) dan dengan pemantauan fungsi mesin, kondisi lapangan dan konsisi operator. Pada saat yang sama kendaraan juga dihubungkan dengan GIS dalam perencanaan kerjanya (Tharom et al. 2000).
Hal yang perlu dilakukan terlebih dahulu dalam pengembangan otomasi sistem kemudi traktor tersebut adalah menyelidiki mekanisme sistem kemudi traktor serta mengembangkan algoritma dan sistem kontrol yang dapat mensinkronkan gerakan maju traktor dengan gerakan mekanisme kemudi traktor. Disamping itu, traktor otomatis yang dikembangkan harus dapat beradaptasi dengan lingkungan alam seperti kondisi lahan pertanian (on farm) dan ruas jalan (off farm).
Beberapa jenis sensor yang dapat digunakan untuk otomasi kemudi traktor adalah: sensor inframerah, sensor ultrasonic, sensor RTK-DGPS, sensor kamera, sensor sinar laser, navigasi radio dan lain-lain. Pada penelitian ini dipilih menggunakan RTK-DGPS karena RTK-DGPS memiliki cakupan posisi yang universal dan presisi. RTK-DGPS memilik akurasi yang sangat baik dengan simpangan dibawah 5 cm
Penelitian otomasi kemudi traktor dengan panduan RTK-DGPS yang dituangkan dalam disertasi ini diharapkan dapat berguna bagi pengembangan otomasi traktor pertanian 4 roda secara keseluruhan di Indonesia. Penelitian sejenis juga dapat dikembangkan untuk otomasi akselerator, transmisi, tuas untuk menaikkan peralatan yang digandeng (implement), power take off (PTO), on-off mesin traktor, sensor posisi dan lain-lain.
Tujuan Penelitian
Secara umum penelitian ini bertujuan membuat disain lapang (field design) perangkat kontrol untuk otomasi kemudi traktor 4 roda dengan menggunakan LabVIEW dan sensor RTK-DGPS (Real Time Kinematic Differential Global Positining System) yang dapat dioperasikan di lahan tegalan secara efektif dan efesien.
Tujuan khusus dari penelitian ini adalah:
1. Mempelajari karakteristik sistim kemudi traktor dan modifikasi kontrol otomatis sistim kemudi.
2. Membangun sistim kontrol kemudi pada traktor 4 roda dengan bantuan RTK-DGPS sebagai pemandu jalannya traktor dan membangun prototip perangkat pengontrol kemudi traktor secara mekatronis.
3. Melakukan uji lapangan untuk mengukur kinerja prototip sistim kontrol.
Manfaat Hasil Penelitian
Pendekatan Masalah
Efektifitas dan produktivitas traktor pertanian tidak diragukan pada suatu operasi pertanian. Besar harapan untuk dapat meningkatkannya dari masa kemasa, sehingga nilai efisiensi operasi traktor pertanian terus meningkat. Berbagai cara dan metode diupayakan untuk meningkatkan efisiensi tersebut, salah satunya dengan otomasi kemudi traktor.
Otomasi kemudi traktor merupakan hal yang menarik untuk dikerjakan karena dengan otomasi kemudi banyak aspek otomasi lain yang dapat dikembangkan. Diantaranya, dengan bantuan GIS dapat dilakukan pekerjaan optimasi pengerjaan lahan, perlakuan yang diperlukan pada lahan dan lain-lain.
Otomasi kemudi traktor adalah mengembangkan sistem kemudi dengan menambahkan beberapa perangkat sehingga sistem tersebut dapat berfungsi secara otomatis. Perangkat dimaksud berupa: aktuator, sensor beserta pendukungnya. Aktuator yang berfungsi sebagai penggerak roda kemudi, sedangkan sensor berfungsi memantau gerakan roda kemudi. Sensor juga menentukan ke mana arah dan besar putaran kemudi serta kecepatan belok kemudi. Secara fungsional sensor memiliki fungsi sebagai penuntun dan pemantau kondisi traktor. Sensor yang umumnya dipakai sebagai penuntun otomasi kemudi traktor adalah: sensor inframerah, sensor ultrasonic, sensor RTK-DGPS, sensor kamera, sensor sinar laser, navigasi radio dan lain-lain. Sedangkan sensor pemantau yang biasa dipakai adalah rotary encoder dan potesiometer.
Pada penelitian ini dipilih RTK-DGPS sebagai sensor penuntun karena RTK-DGPS memiliki cakupan posisi yang universal dan presisi. RTK-DGPS memilik akurasi yang sangat baik dengan simpangan kurang dari 5 cm, sedangkan untuk sensor pemantau menggunakan potensiometer. Pengolahan keseluruhan perangkat diatas dilakukan di komputer dengan perangkat lunak (software) LabVIEW untuk aplikasi kontrol, pengujian, pengukuran dan otomasi.
Kerangka konsep pendekatan masalah tahap penelitian disajikan pada Gambar 1
Kebaruan (Novelty)
7
TINJAUAN PUSTAKA
Konsep Otomatisasi Traktor Pertanian
Kontrol otomatis pada traktor pertanian telah dipelajari sejak beberapa dekade yang lalu. Manfaat dari traktor pertanian otomatis meliputi peningkatan produktivitas, peningkatan ketelitian aplikasi, dan peningkatan keselamatan operasi (Reid et al. 2000). Kontrol kemudi merupakan kombinasi hidrolik dan atau komponen elektronik yang menyebabkan roda kemudi berputar sesuai keinginan. Berbagai teknologi pengendalian yang mencakup kontrol mekanik, kontrol arah-mesin, navigasi radio, dan kontrol ultrasonik juga telah diteliti oleh (Reid et al. 2000; Guo et al. 2003). Kebanyakan pekerjaan dinamika traktor hanya mempertimbangkan faktor traktor tanpa menentukan karakteristik pengendaraannya.
Sistem kontrol kendaraan pertanian mendapat perhatian kalangan peneliti lebih dari lima puluh tahun. Kebutuhan agar operator tidak harus selalu memutar roda kemudi ketika menggunakan perlengkapan tambahan merupakan alasan yang sering disebutkan bagi digunakannya sistim pengendalian (Wilson 2000). Para peneliti di Universitas Illinois telah sukses mengembangkan dan mendemonstrasikan suatu prototip traktor otomatik yang dapat melakukan penanaman otomatis dan pemupukan lahan (Zhang 1999).
mengembangkan sistim pengendalian otonomos atau dapat berjalan sendiri (Torii 2000).
Kontrol Gerak Non-holonomik
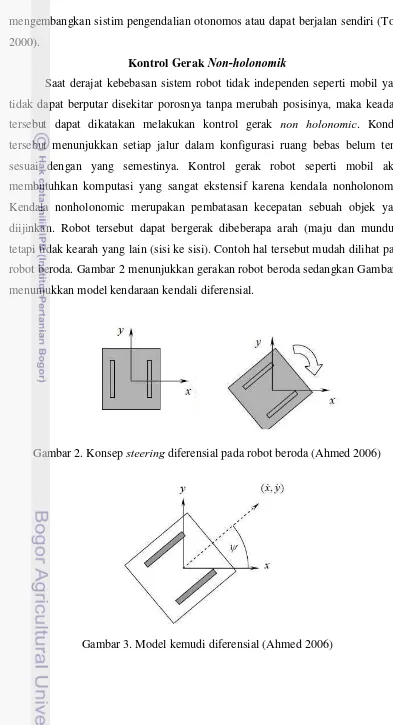
Saat derajat kebebasan sistem robot tidak independen seperti mobil yang tidak dapat berputar disekitar porosnya tanpa merubah posisinya, maka keadaan tersebut dapat dikatakan melakukan kontrol gerak non holonomic. Kondisi tersebut menunjukkan setiap jalur dalam konfigurasi ruang bebas belum tentu sesuai dengan yang semestinya. Kontrol gerak robot seperti mobil akan membutuhkan komputasi yang sangat ekstensif karena kendala nonholonomic. Kendala nonholonomic merupakan pembatasan kecepatan sebuah objek yang diijinkan. Robot tersebut dapat bergerak dibeberapa arah (maju dan mundur), tetapi tidak kearah yang lain (sisi ke sisi). Contoh hal tersebut mudah dilihat pada robot beroda. Gambar 2 menunjukkan gerakan robot beroda sedangkan Gambar 3 menunjukkan model kendaraan kendali diferensial.
Gambar 2. Konsep steering diferensial pada robot beroda (Ahmed 2006)
Gambar 4 menunjukan suatu contoh model kinematik yang dapat dilakukan oleh suatu kendaraan automasi, dimana xr, yr merupakan suatu
koordinat sumbu kartesius pada titik tengah dari roda belakang suatu kendaraan automasi, θ merupakan sudut orientasi, α adalah sudut kemudi dan l adalah jarak antara bagian depan dan belakang kendaraaan.
Gambar 4. Suatu model kinematik dari mobil seperti robot (Ahmed 2006)
Kendaraan automasi melakukan dua macam gerak nonholonomic yang membatasi, yaitu mengikuti fungsi;
sin cos 0………[1]
sin 0………[2]
dimana αfr dan θfr merupakan koordinat dari bagian roda depan kendaraan
automasi.
-
hanya menggulung tanpa slip maka gerakan berubah ubah tidak akan terjadi. Kesulitan perencanaan gerakan non holmonik bermula dari sini.
Kontrol Dengan Umpan Balik
Sistem kontrol (control system) adalah suatu alat (kumpulan alat) untuk mengendalikan, memerintah, dan mengatur keadaan dari suatu sistem. Contoh sederhana istilah sistem kendali ini dapat dipraktekkan untuk mengendalikan stir traktor pada saat kita mengendarai/menyetir traktor kita. Banyak contoh lain dalam bidang industri atau instrumentasi dan dalam kehidupan kita sehari-hari di mana sistem ini dipakai. Alat pendingin (AC) merupakan contoh yang banyak kita jumpai yang menggunakan prinsip sistem kendali, karena suhu ruangan dapat dikendalikan sehingga ruangan berada pada suhu yang kita inginkan.(Wikipedia)
Secara umum sistim kontrol terbagi atas:
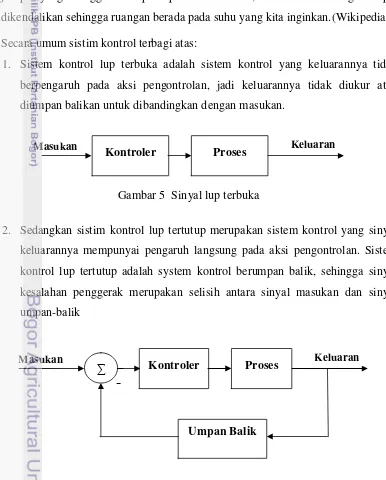
1. Sistem kontrol lup terbuka adalah sistem kontrol yang keluarannya tidak berpengaruh pada aksi pengontrolan, jadi keluarannya tidak diukur atau diumpan balikan untuk dibandingkan dengan masukan.
Gambar 5 Sinyal lup terbuka
2. Sedangkan sistim kontrol lup tertutup merupakan sistem kontrol yang sinyal keluarannya mempunyai pengaruh langsung pada aksi pengontrolan. Sistem kontrol lup tertutup adalah system kontrol berumpan balik, sehingga sinyal kesalahan penggerak merupakan selisih antara sinyal masukan dan sinyal umpan-balik
Kontroler Proses
Masukan Keluaran
Kontroler Proses
Masukan Keluaran
∑
Gambar 6 Sinyal lup tertutup umpan balik negatif
Pada otomasi sistim kemudi traktor dimana umpan balik dipergunakan sebagai parameter kondisi traktor, maka digunakan sistim kontrol sinyal tertutup.
Gambar 7 Dasar dari arah pembacaan untuk suatu robot otomatis beroda (a) titik ke titik pergerakan, (b) jalur garis yang dilalui, (c) alur lintasan kerja. (Junyusen 2005)
• Gerak robot dari titik ke titik (point-to-point): robot harus mencapai tujuan dari titik awal ke titik tujuan
• Robot mengikuti jalur tertentu (path following): robot harus mencapai tujuan akhir yang diinginkan yang dimulai dari konfigurasi awal sementara pada saat yang bersamaan, robot harus mengikuti lintasan pada sumbu Cartesian.
• Mengikuti lintasan (trajectory following): robot harus mencapai posisi akhir lintasan pada sumbu geometri Cartesian.
Tugas dapat diperoleh dengan menggunakan lup terbuka, kontrol umpan balik (loop tertutup) atau kombinasi antar keduanya. Karena sistem umpan balik kontrol baik dapat mengantisipasi gangguan, maka akan dipilih untuk digunakan.
Pengaruh Slip Pada Kontrol Steering
Secara umum pengujian di lahan karena reaksi dengan tanah; mobilisasi traktor merupakan fungsi dari kondisi tanah, traktor, dan iklim setempat. Sehingga pengujian di lahah bergantung pada:
1. Gaya reaksi tanah, yaitu gaya reaksi dari tanah yang arahnya tegak lurus terhadap permukaan roda dan melewati sumbu roda. Gaya reaksi tanah menentukan kekuatan tanah saat dilintasi traktor. Hal ini berkaitan dengan kompleksitas, ketidakseragaman dan keragaman sifat-sifat tanah. Pada kondisi tanah dengan kekerasan tidak seragam dan atau bongkahan besar dapat terjadi benturan pada roda. Sebaliknya pada kondisi tanah dengan kadar air sangat tinggi akan membuat traktor slip.
2. Tahanan gelinding (rolling resistence), yaitu tahanan pada roda kendaraan di atas permukaan tanah. Besarnya tahanan ini tergantung pada permukaan tanah tempat bekerja traktor (Filiyanti 2009). Tahanan tersebut terjadi akibat adanya kompaksi pada tanah. Besarnya tahanan gelinding adalah besarnya energi yang dilakukan untuk mengubah bentuk tanah (Roh 2009)
dapat berjalan dengan baik di landasan (Roh 2009). Gaya traksi horisontal yang disalurkan (diteruskan) antara mesin dan tanah tergantung oleh kekuatan tanah dan parameter desain mesin. Dalam hal ini, besar gaya traksi maksimum adalah sama dengan jumlah kuat geser tanah di atas luasan kontak (ground contact) total semua roda penggerak mesin (traktor) (McKyes 1985). Dengan ketiga kendala di atas maka kendali traktor tidak dapat hanya bergantung pada sistem kemudi saja (http://id.wikipedia.org/wiki/Traktor). Masalah ini dapat diatasi dengan menggunakan beberapa cara, yaitu:
1. Gunakan pengereman roda kiri atau kanan untuk belok kekiri atau kanan 2. Gunakan kunci diferensial (differential lock) untuk mempertahankan kondisi
pada saat traktor berjalan lurus.
Sensor Untuk Pengindera
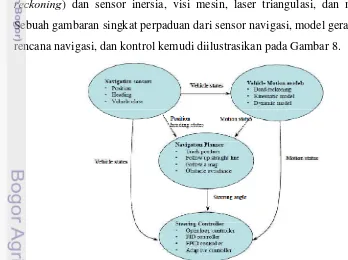
Para peneliti menekankan pemilihan sensor untuk kendali yang tepat dari kendaraan pertanian. Salah satu sensor kendali adalah kontribusi sistem kendali kendaraan pertanian yang menggunakan GPS, perhitungan titik henti (dead reckoning) dan sensor inersia, visi mesin, laser triangulasi, dan multi sensor. Sebuah gambaran singkat perpaduan dari sensor navigasi, model gerak kendaraan, rencana navigasi, dan kontrol kemudi diilustrasikan pada Gambar 8.
Beberapa sensor yang biasa digunakan pada system otomasi di lintasan adalah:
1. Sensor Proximity (sensor jarak), di mana sensor ini dapat mendeteksi benda tanpa menyentuh benda tersebut. Sensor ini bekerja dengan memancarkan medan elektromagnetik atau radiasi elektromagnetik (inframerah misalnya). Objek yang menjadi target sering disebut dengan target sensor. Jarak maksimum sensor ini bervariasi, bebrapa sensor memilik kisaran jarak yang dapat di sesuaikan (wikipedia). Rata-rata jarak diteksi untuk warna putih sejauh 5-25 cm. Sensor ini memiliki keandalan yang tinggi dan umur fungsional yang panjang karena tidak memiliki bagian mekanis dan kurangya kontak fisik antar sensor dan objek.
2. Sesor infra merah, sistem yang pada dasarnya menggunakan inframerah sebagai media komunikasi data antara receiver dan transmitter. Sistem akan bekerja jika sinar infra merah yang dipancarkan terhalang oleh suatu benda yang mengakibatkan sinar infra merah tersebut tidak dapat terdeteksi oleh penerima. Keuntungan atau manfaat dari sistem ini dalam penerapannya antara lain sebagai pengendali jarak jauh, alarm keamanan, otomatisasi pada sistem.Pemancar pada sistem ini tediri atas sebuah LED infra merah yang dilengkapi dengan rangkaian yang mampu membangkitkan data untuk dikirimkan melalui sinar infra merah, sedangkan pada bagian penerima biasanya terdapat foto transistor, fotodioda, atau modul inframerah yang berfungsi untuk menerima sinar inframerah yang dikirimkan oleh pemancar. (Anto Susilo 2009)
3. Sensor ultrasonik, yang bekerja dengan prinsip serupa dengan radar. Cara mengenali target melalui pantulan dari gelombang yang dihasilkannya. Gelombang yang dihasilkan berfrekuensi tinggi (di atas 1800 hertz) dan diterima oleh sensor. Untuk menentukan jarak obyek, sensor menghitung selisih interval waktu antara pengrirman dan penerimaan sinyal. Teknologi ini dapat digunakan untuk mengukur kecepatan dan arah angin. Berbagai aplikasi yang telah digunakan seperti pada pengukuran kelembababan, USG medis, pengujian tak merusak (non-destructive test) (Wikipedia).
macam cuaca, serta didesain untuk memberikan informasi mengenai posisi dan waktu secara kontinyu di seluruh dunia (Muh. Altin Massinai 2005). GPS secara luas digunakan untuk lokalisasi robot dan objek bergerak, dan pelacakan manusia. Posisi absolut dari penerima GPS ditentukan menggunakan teknik triangulasi sederhana berdasarkan waktu tempuh sinyal radio yang secara unik dikodekan dari satelit. Masalah utama dari sistem GPS meliputi: i) waktu sinkronisasi antara satelit dan penerima, ii) lokasi real time satelit yang tepat, iii) tingkat kesulitan untuk mengukur waktu propagasi sinyal iv) noise elektromagnetik dan pengaruh lain seperti penyumbatan sinyal periodik oleh pohon-pohon dan bangunan saat platform pengujian bergerak di bawah atau didekat pohon-pohon atau bangunan. Kekurangan utama yang lain dari GPS adalah degradasi sinyal terjadi ketika penerimaan dari satelit tujuan asal menunjukkan sinyal kurang dari empat satelit atau ketika interferensi. Hal tersebut terjadi terhadap jarak yang pendek dalam suatu lintasan perjalanan kendaraan automasi.
RTK-DGPS
1. RTK-DGPS adalah sistem navigasi berbasis satelit yang sering digunakan pada teknik survei tanah. Pada penggunaannya menggunakan fase (carrier phase) dari GPS Glonass dan atau sinyal Galileo. Sistem ini menggunakan stasiun referensi yang mengirimkan data koreksi presisi tingkat tinggi (ordo centimeter) secara real time. (Wikipedia).
2. Sistim koreksi, secara umum ada dua metode dalam mengirim data koreksi, yaitu dengan menggunakan:
a. frekuensi radio, aplikasi metode ini membutuhkan base station dekat dengan area kerja DGPS yang bekerja bergerak di lapangan (mobile), data koreksi dikirim dengan frekuensi radio. Secara umum, sistem tersebut merupakan sistem frekuensi-rangkap (Gan-Mor dan Clark, 2001). Kelemahan dari sistem ini pada wilayah yang koreksi, yaitu hanya seluas jangkauan frekuensi radio.
Sistem bernama NTRIP (Networked Transport of RTCM via Internet Protocol), sebuah jaringan dari RCTM (Radio Technical Commission. for Maritime Services), yang dikembangkan oleh Federal Agency for Cartography and Geodesy of Germany, sebuah Badan di Jerman untuk Kartografi dan Geodesi. Dengan NTRIP memungkinkan data koreksi RTK dikirim melalui GSM, GPRS, EDGE, atau UTMS. Dengan menggunakan NTRIP akses koreksi dapat digunakan pada radius yang cukup luas (Lenz 2004)
3. Format NMEA adalah format data keluaran GPS, sebanyak lima jenis yaitu NMEA 0180, NMEA 0182, NMEA 0183, AVIATION, dan PLOTTING. Format tersebut ditetapkan oleh NMEA (National Maritime Electronic Association). Pada umumnya data keluaran yang digunakan adalah format data NMEA 0183 berbentuk kalimat (string) yang merupakan rangkaian karakter ASCII 8 bit. Setiap kalimat (string) diawali dengan satu karakter '$', dua karakter Talker ID, tiga karakter Sentence ID, dan diikuti oleh data koordinat lapangan yang masing-masing dipisahkan oleh koma serta diakhiri oleh optional checksum dan karakter cariage return/line feed (CR/LF) (Ali Murtadlo, 2010). NMEA-0183 berisi informasi yang berhubungan dengan geografi seperti tentang waktu, longitude, latitude, ketinggian, kecepatan dan masih banyak lagi. Untuk menampilkan informasi yang lebih dimengerti oleh user data NMEA-0183 perlu diolah lebih lanjut (Andi 2009).
Jenis-jenis kalimat NMEA:
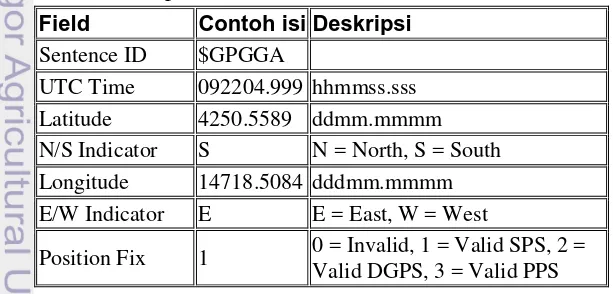
a. $GPGGA (Global Positioning System Fixed Data)
Contoh:
$GPGGA,092204.999,4250.5589,S,14718.5084,E,1,04,24.4,19.7,M,,,,0000*1F
Tabel 1 Deskripsi $GPGGA
Field Contoh isi Deskripsi
Sentence ID $GPGGA
UTC Time 092204.999 hhmmss.sss
Latitude 4250.5589 ddmm.mmmm
N/S Indicator S N = North, S = South
Longitude 14718.5084 dddmm.mmmm
E/W Indicator E E = East, W = West
Position Fix 1 0 = Invalid, 1 = Valid SPS, 2 =
Satellites Used 04 Satellites being used (0-12)
HDOP 24.4 Horizontal dilution of precision
Altitude 19.7 Altitude in meters according to
WGS-84 ellipsoid
Altitude Units M M = Meters
Geoid Seperation Geoid seperation in meters
according to WGS-84 ellipsoid
c. $GPGLL (Geographic –Latitude/Longitude
Contoh: $GPGLL,4250.5589,S,14718.5084,E,092204.999,A*2D
Tabel 2 Deskripsi $GPGLL
Field Contoh isi Deskripsi
Sentence ID $GPGLL
Latitude 4250.5589 ddmm.mmmm N/S Indicator S N = North, S = South Longitude 14718.5084 dddmm.mmmm E/W Indicator E E = East, W = West UTC Time 092204.999 hhmmss.sss
Status A A = Valid, V = Invalid Checksum *2D
Terminator CR/LF
d. $GPGSA (GNSS DOP and Aktive Satelites)
Contoh: $GPGSA,A,3,01,20,19,13,,,,,,,,,40.4,24.4,32.2*0A
Tabel 3 Deskripsi $GPGSA
Field Contoh isi Deskripsi
Sentence ID $GPGSA
Mode 1 A A = Auto 2D/3D, M = Forced 2D/3D Mode 1 3 1 = No fix, 2 = 2D, 3 = 3D
Satellite used 4 13 Satellite used on channel 4 Satellite used 10 Satellite used on channel 10 Satellite used 11 Satellite used on channel 11 Satellite used 12 Satellite used on channel 12 PDOP 40.4 Position dilution of precision HDOP 24.4 Horizontal dilution of precision VDOP 32.2 Vertical dilution of precision
Checksum *0A
Terminator CR/LF
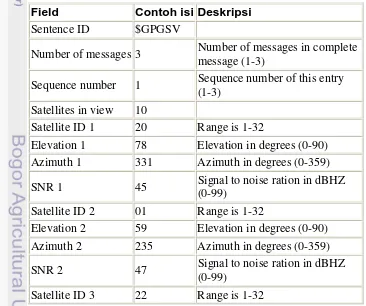
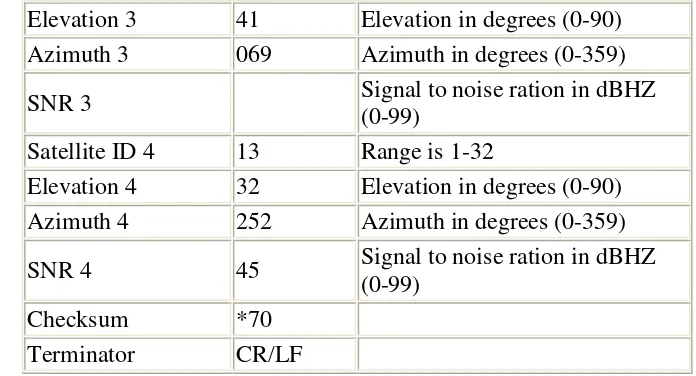
e. $GPGSV (GNSS Satelite In View) Contoh:
$GPGSV,3,1,10,20,78,331,45,01,59,235,47,22,41,069,,13,32,252,45*70
Tabel 4 Deskripsi $GPGSV
Field Contoh isi Deskripsi
Sentence ID $GPGSV
Number of messages 3 Number of messages in complete message (1-3)
Sequence number 1 Sequence number of this entry (1-3)
Satellites in view 10
Satellite ID 1 20 Range is 1-32
Elevation 1 78 Elevation in degrees (0-90) Azimuth 1 331 Azimuth in degrees (0-359)
SNR 1 45 Signal to noise ration in dBHZ (0-99)
Satellite ID 2 01 Range is 1-32
Elevation 2 59 Elevation in degrees (0-90) Azimuth 2 235 Azimuth in degrees (0-359)
SNR 2 47 Signal to noise ration in dBHZ (0-99)
Elevation 3 41 Elevation in degrees (0-90) Azimuth 3 069 Azimuth in degrees (0-359)
SNR 3 Signal to noise ration in dBHZ (0-99)
Satellite ID 4 13 Range is 1-32
Elevation 4 32 Elevation in degrees (0-90) Azimuth 4 252 Azimuth in degrees (0-359)
SNR 4 45 Signal to noise ration in dBHZ (0-99)
Checksum *70
Terminator CR/LF
f. $GPRMC (Recommended Minimum Specific GNSS Data) Contoh:
$GPRMC,092204.999,A,4250.5589,S,14718.5084,E,0.00,89.68,211200,,* 25
Tabel 5 Deskripsi $GPRMC
Field Contoh isi Deskripsi
Sentence ID $GPRMC
UTC Time 092204.999 hhmmss.sss
Status A A = Valid, V = Invalid Latitude 4250.5589 ddmm.mmmm
N/S Indicator S N = North, S = South Longitude 14718.5084 dddmm.mmmm E/W Indicator E E = East, W = West Speed over ground 0.00 Knots
Course over ground 0.00 Degrees
UTC Date 211200 DDMMYY
Magnetic variation Degrees
Checksum *25
Terminator CR/LF
Tabel 6 Deskripsi $GPVTG
Field Contoh isi Deskripsi
Sentence ID $GPVTG
Course 89.68 Course in degrees Reference 89.68 T = True heading Course Course in degrees Reference 89.68 M = Magnetic heading Speed 0.00 Horizontal speed
Units N N = Knots
Speed 0.00 Horizontal speed
Units K K = KM/h
Checksum *5F Terminator CR/LF
4. Sistem Konversi, adalah prosedur matematis yang memungkinkan hasil pengukuran yang dilakukan di permukaan bumi secara fisik bisa digambarkan diatas bidang datar (peta). Karena permukaan bumi tidak teratur maka akan sulit untuk melakukan perhitungan-perhitungan langsung dari pengukuran. Untuk itu diperlukan pendekatan secara matematis (model) dari bumi fisis tersebut. Model matematis bumi yang digunakan adalah ellipsoid putaran dengan besaran-besaran tertentu. Maka secara matematis proyeksi peta dilakukan dari permukaan ellipsoid putaran ke permukaan bidang datar (Ira 2004). Ada beberapa system konversi, diantaranya:
a. Sistim proyeksi ECEF (Earth-Centered, Earth-Fixed) merupakan sistem koordinat Cartesian tiga dimensi X, Y, dan Z, dimana titik (0,0,0) didefinisikan sebagai pusat massa bumi. Oleh sebab itu diberi nama Pusat Bumi dimana sumbunya sejajar dengan Referensi Kutub Internasional (IRP) dan International Referensi Meridian (IRM) yang tetap terhadap permukaan bumi, maka dinamakan Bumi Tetap.
tetap di permukaan bumi tidak berubah. Konversi dari Datum WGS84 untuk ECEF dapat digunakan sebagai langkah menengah dalam mengkonversi kecepatan ke Timur Utara sistem koordinat (Radite 2001)
Gambar 9 Proyeksi ECEF
Konversi ke ECEF dapat rumuskan sebagai berikut: cos cos
cos sin
sin dimana:
θ = lintang (°)
λ = bujur (°)
h = tinggi dari titik ellipsoid (m)
a = separuh diameter bumi (=6378137 m) f = flattening (=298.257223563 m)
v = jari-jari utama kelengkungan vertikal ( √!"#$ &'($))
ini dikembangkan ol
n oleh para insinyur tentara Amerika Serikat pa Metode ini paling banyak dipakai untuk topog dengan berbagai bentuknya. Secara umum se uk dasar dan rumus yang sama. Penerapan proyeks
karena perbedaan pemilihan parameter tra rameter tersebut adalah (1) garis lintang, ga ), (2) faktor skala (3) nilai-nilai False Eastin
orthing. False Northing dan False Easting me dari asal alam dengan asal grid. Selain itu var untuk proyeksi digunakan di wilayah yang berbe
bawah ini rumus sederhana konversi dari linta nat UTM (E, N) dengan akurasi sekitar sentimet nggambarkan bumi sebagai bola spheroid uta gan jari-jari khatulistiwa dari = 6378.137
METODE PENELITIAN
Penelitian ini terbagi menjadi pengkajian karakteristik system kemudi traktor, pembuatan perangkat, sistem kemudi otomatis dan pengujian. Pembuatan perangkat lunak dilakukan di Labolatorium Elektronika Industri, Jurusan Teknik Elektro, Politeknik Negeri Jakarta, Depok. Sedangkan pengujian kinerja traktor dengan sistem kemudi otomatis dilakukan di Labolatorium Lapangan, Departemen Teknik Mesin dan Biosistem, Fakultas Teknologi Pertanian, Institut Pertanian Bogor.
Alat dan Bahan Penelitian
Peralatan yang perlukan dalam penelitian ini adalah:
A. Peralatan yang di gunakan dalam pembuatan system otomasi kemudi traktor adalah:
1. Komputer Laptop Pentium IV untuk mengatur gerakan, merekam, menyimpan, dan mengolah data.
2. Perangkat lunak LabVIEW sebagai basis program system kontrol yang dipakai
3. Elektro motor DC untuk menggerakkan roda kemudi traktor beserta
drivernya sebagai penggerak roda kemudi
4. Potensiometer, sensor posisi sudut belok roda depan traktor.
5. Ni-DAQ, 6008 sebagai perangkat pengolah data akuisisi, pengubah jenis sinyal analog ke digital dan sebaliknya, serta penghubung antar komputer dengan, sensor proximiti, potensiometer dan motor driver.
6. Proximty Detector Sensor yang berguna sebagai penjejak garis.
B. Peralatan dan bahan yang digunakan untuk pengujian kinerja system kemudi otomatis traktor adalah:
1. Traktor 4 roda Kubota B6100 dengan penggerak 4 roda
2. Komputer Laptop Pentium IV untuk mengatur gerakan, merekam, menyimpan, dan mengolah data.
4. Elektro motor DC untuk menggerakkan roda kemudi traktor beserta
drivernya sebagai penggerak roda kemudi
5. Timbangan pegas untuk mengtahui besarnya gaya belok roda kemudi. 6. Busur derajat untuk mengukur besar sudut simpangan
7. Sepasang puli sabuk bergigi beserta sabuk bergiginya untuk menggerakkan secara mekanisme poros roda kemudi oleh motor DC. 8. Komputer Laptop Pentium IV untuk mengatur gerakan, merekam,
menyimpan, dan mengolah data.
9. Potensiometer, sensor posisi sudut belok roda depan traktor.
10.Ni-DAQ, 6008 sebagai perangkat pengolah data akuisisi, pengubah jenis sinyal analog ke digital dan sebaliknya, serta penghubung antar komputer dengan, sensor proximiti, potensiometer dan motor driver.
11.Proximty Detector Sensor yang berguna sebagai penjejak garis.
12.RTK-DGPS (Real Time Kinematic - Defferential Global Positioning System) merek Leica untuk menentukan posisi koordinat lintang bujur traktor secara presisi.
Tahapan Penelitian
Mempelajari Karakteristik Sistem Kemudi Traktor
Penelitian dimulai dengan mempelajari karakteristik sistem kemudi traktor. Pada tahap ini diadakan beberapa pengujian untuk mengetahui parameter dasar yang di perlukan seperti menguji besarnya sudut belok dan besar torsi belok pada roda kemudi saat traktor belok dibeberapa permukaan sentuh. Hal tersebut untuk mengetahui jenis motor penggerak yang tepat dan rasio puli yang dipakai untuk mendapatkan keuntungan mekanis.
Parameter yang pertama kali ingin ketahui adalah posisi belok roda depan traktor. Langkah yang dilakukan dengan mengukur posisi roda depan traktor pada beberapa posisi roda kemudi (steering wheel). Dalam hal ini dipilih setiap 10 derajat putaran di roda kemudi yang dimulai dari posisi lurus kearah belok kanan dan kiri. Catat posisi sudut belok roda depan pada setiap posisi belok roda kemudi.
timbangan pegas. Agar besar gaya akurat, posisi timbangan pegas harus tegak lurus jari-jari arah putar roda kemudi.
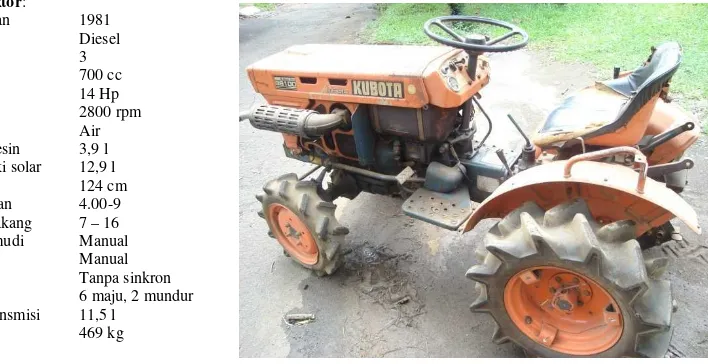
Spesifikasi traktor:
Kapasitas Tangki solar 12,9 l
Jarak sumbu 124 cm
Ukuran ban depan 4.00-9
Ukuran ban belakang 7 – 16
Jenis sistem kemudi Manual
Transmisi Manual
Tipe transmisi Tanpa sinkron
Jumlah gigi 6 maju, 2 mundur
Kapasitas oli transmisi 11,5 l
Berat 469 kg
Gambar 10 Traktor 4 roda yang di gunakan
Modifikasi Kontrol Otomatis Sistem Kemudi
Berdasarkan data pengukuran besar sudut belok dan torsi belok ditentukan motor penggerak roda kemudi. Roda kemudi baru dapat bergerak jika torsi motor dan puli di poros roda kemudi lebih besar dari torsi roda kemudi. Artinya besar torsi motor setelah perbandingan puli harus lebih besar dari torsi maksimum roda kemudi saat pengujian.
Motor penggerak roda kemudi baru dapat berfungsi sesuai dengan keinginan setelah ditentukan driver yang sesuai dan dibuatkan program komputer untuk menggerakkan motor tersebut. Program dimaksud berfungsi agar motor penggerak memiliki karakteristik variasi arah dan kecepatan putar motor, sehingga arah dan kecepatan motor dapat diputar sesuai keinginan. Untuk menghindari motor bergerak di luar kendali, maka di sisi kedua roda depan traktor diberi sensor pemutus (touch switch), sehingga bila ini terjadi arus ke motor akan terputus dan motor berhenti bergerak.
kondisi lapangan yang terjadi diharapakan dapat dipantau dan diatasi untuk menjaga agar kondisi traktor selalu di lintasan.
MULAI
Gambar 11 Diagram alir kontrol lurus
Pengembangan Sistem Kontrol Kemudi
Berikutnya adalah penentuan sistem interaksi antar motor dengan traktor, di mana diperlukan sensor untuk mengetahui kondisi traktor. Pada sistem tersebut guna sensor untuk mengetahui simpangan traktor. Sensor tersebut memberi masukan sebagai umpan balik sehingga traktor dapat bekerja sesuai rencana. Sistem umpan balik pertama yang digunakan adalah potensiometer. Potensiometer dipilih untuk mengetahui posisi sudut belok roda depan traktor. Secara sederhana sistem interaksi ini dapat dilihat pada Gambar 12
Gambar 12 Diagram alir sinyal untuk kendaraan otomasi
Sistem kontrol posisi berguna untuk mengetahui berbagai posisi yang akan terjadi pada saat traktor melintas pada lintasan utama. Hal tersebut penting untuk mengatahui aksi kontrol yang harus dilakukan, bila traktor menyimpang dari lintasan.
Uji Lapangan Untuk Mengukur Kinerja Prototip Sistem Kontrol
Sensor Proximiti
Sebelum menggunakan RTK-DGPS sebagai sistem sensor, dipilih sistem sensor lain untuk menguji sistem umpan balik sebagai sensor posisi. Sensor proximiti dipilih karena memiliki sistim pantulan sinar inframerah yang dapat berfungsi sebagai penjejak garis (line follower). Fungsi penjejak garis ini difungsikan sebagai sensor. Sistem sinyalnya dapat dilihat pada Gambar 13
simpangan yang terjadi. Pengukuran simpangan dilakukan setiap 10 cm sepanjang lintasan uji.
Gambar 13 Diagram alir sinyal untuk kendaraan otomasi dengan sensor proximity
RTK-DGPS
DGPS digunakan pada tahap pengujian berikutnya. Fungsi RTK-DGPS sebagai sensor posisi menggantikan sensor proximiti yang bekerja memberi informasi posisi koordinat bumi di mana traktor berada secara presisi. Selisih posisi sesungguhnya dengan lintasan yang direncanakan menentukan aksi yang harus dilakukan oleh roda kemudi untuk menjaga kelurusan traktor sesuai rencana. Sistem interaksi sinyal kontrolnya dapat dilihat pada Gambar 14
Gambar 15 Letak posisi sensor pada traktor tampak samping dan atas
Seluruh proses perhitungan dan aksi dilakukan oleh komputer. Pengolahan data pada penelitian ini yaitu data yang diterima dari DGPS akan diubah menjadi standar NMEA yang memiliki banyak data. Dipilih beberapa data sehingga diperoleh data posisi lintang dan bujur traktor saja. Masuknya data dari DGPS ke komputer secara serial melalui terminal serial USB.
Adapun tahapan pengujian menggunakan sensor RTK-DGPS adalah: 3. Hidupkan DGPS, pastikan kartu sim card GSM telah terpasang, gunakan
sim card yang memiliki sinyal di lokasi yang digunakan untuk menguji. 4. Menyesuaikan satuan koordinat output dengan satuan yang diinginkan 5. Hubungkan sistem NTRIP (Networked Transport of RTCM (Radio
Technical Commission. for Maritime Services) via Internet Protocol). 6. Tunggu hingga terhubung dengan base station pemancar NTRIP. 7. Setelah terhubung perhatikan nilai koreksinya (Gambar 15).
8. Perhatikan kontroler, jika nilai koreksinya sudah berkisar antara 0.015-0.028 m, baru lakukan pengujian (Gambar 15).
Potensiometer
Sensor roda kemudi
9. Memperhatikan nilai koreksi selama pengujian, jika terjadi perubahan yang besar akan mengubah arah traktor.
Gambar 15 Tampilan kontroler Leica GS 15
10. Kfdj szdf uosdf osdf siodf u
Pengkuran Simpangan
Pengukuran simpangan pada pengujian dengan sensor RTK-DGPS dilakukan dengan mencari jarak antar koordinat terjauh simpangan dan acuan. Metode yang dipakai dengan mengacu pada persamaan garis y = ax + b, langkah berikutnya adalah:
a. Mencari gradien (a) lintasan acu melalui selisih koordinat awal dan akhir. b. Mencari nilai b pada persamaan garis, bila a, x dan y telah diketahui dari
lintasan acu, maka b didapat.
c. Dengan diketahuinya koordinat posisi simpangan dan persamaan garis acu, maka koordinat posisi awal simpangan dapat diketahui.
d. Dengan diketahuinya kedua titik tersebut, maka sudut simpangan yang terjadi pun sudah diketahui.
e. Karena sudutnya sudah diketahui, maka dengan menggunakan rumus tangen jarak simpangan pun dapat dicari.
f. Terakhir adalah mencari nilai simpangan paling ekstrim, itulah simpanga terbesar.
HASIL DAN PEMBAHASAN
Karakteristik Sistem Kemudi Traktor dan Modifikasi Kontrol Otomatis
Sistem Kemudi
Parameter yang diperlukan pada sistem kemudi traktor 4 roda, seperti besarnya sudut belok traktor pada saat menyentuh permukaan dan pada saat tidak menyentuh permukaan (roda depan digantung) serta besarnya torsi belok pada beberapa jenis permukaan traktor. Adapun uraiannya adalah sebagai berikut. Gambar 16 A dan B di bawah memperlihatkan bahwa sudut putar roda kemudi memiliki hubungan yang linier terhadap sudut belok roda depan. Ini berarti semakin besar putaran pada roda kemudi akan menambah sudut belok roda depan. Sudut putar maksimum untuk roda kemudi arah belok kiri dan kanan sebesar 3100, sedangkan sudut belok roda depan sebesar 320 pada saat menyentuh permukaan.
Selanjutnya Gambar 16 C dan D menunjukkan kondisi roda depan tidak menyentuh permukaan tanah, sudut putar roda kemudi maksimum adalah 3500, sedangkan sudut belok roda depan maksimum adalah 480. Bila diteliti dengan jelas terlihat ada pada awal grafik, saat sudut roda kemudi diputar tidak diiringi dengan gerakan pada roda depan. Ini disebabkan adanya loss karena keadaan roda gigi pada rumah kemudi (steering house) yang sudah aus.
Gambar 16 A) besar sudut belok kiri dengan permukaan roda menyentuh permukaan lintasan, B) besar sudut belok kanan dengan permukaan roda menyentuh permukaan lintasan, C) Besar sudut belok kiri dengan permukaan roda tidak menyentuh permukaan litasan (diangkat), D) Besar sudut belok kanan dengan permukaan roda tidak menyentuh permukaan lintasan (diangkat)
Tabel 7. Hasil pengukuran pada pengujian di berbagai jenis lintasan
Jenis permukaan lintasan Jari-jari kemudi (m)
Berdasarkan Gambar 16 A, maka diperoleh persamaan
jika diinginkan koreksi posisi sebanyak 3 kali setiap detik, dengan rata-rata maksimal sudut koreksi sebesar 1.5° dari sudut roda depan traktor, maka kecepatan koreksi sebesar 4.5° setiap detiknya, atau sama dengan 270° setiap menitnya. Berdasarkan persamaan [3], maka kecepatan koreksi sudut kemudi sebesar 38.6 rpm.
Berdasarkan pengujian, torsi maksimum yang diperlukan untuk memutar kemudi adalah 5.6 N.m (Tabel 7). Bila diasumsikan kecepatan putar poros kemudi 39 rpm, maka daya putar yang diperlukan adalah
* + , + 2./
60 5.6
2. 39
60 22.87 7899
Untuk itu, digunakan motor listrik dengan daya yang lebih besar dari 22.87 Watt. Dalam hal ini digunakan motor listrik berdaya 48.5 Watt
Karena kecepatan putar motor 3000 rpm, maka diperlukan penurunan kecepatan putar sampai 39 rpmdengan menggunakan gearbox dari pasangan sabuk dan puli bergigi. Rasio transmisinya adalah 3000 : 39 77
Dengan rasio sabuk bergigi sebesar 3 kali, maka rasio gearbox `di motor minimal harus sebesar 26 kali.
Sistem Kontrol Kemudi pada Traktor 4 Roda dan membangun protip
perangkat pengontrol kemudi traktor secara mekatronis
Sistem kontrol kemudi pada traktor 4 roda dimulai dari tahapan pemilihan komponen. Pertama melihat kondisi sistem kemudi traktor dilanjutkan dengan menentukan sistem penggerak roda kemudi dan mengetahui posisinya. Pada tahapan ini ada beberapa data yang diperlukan yaitu besarnya sudut belok, dan besarnya beban putar roda kemudi pada beberapa landasan. Berdasarkan data hasil penelitian maka dipilih motor DC menggerakkan poros roda kemudi. Adapun media geraknya dengan menggunakan sabuk bergigi (timing belt), Gambar 18A
porosnya. Ada banyak jeni dan ganda. Posisi potensio dengan salah satu bagian tergantung pada kualitas pe digit yang digunakan oleh dikategorikan sebagai sens terendah atau dua prepos perpindahan rotasi menghas
enis potensiometer tersedia termasuk rangkaia nsio mengukur tegangan analog antara bagian n terluar dari potensiometer. Resolusi sensor perangkat, level noise elektronik yang ada da oleh konverter analog ke digital. Alat ini seca
sensor presisi rendah yang digunakan pada eposisi sensor inkremental resolusi tinggi ghasilkan data navigasi dari rotasi roda.
kerja potensiometer yang dipakai sebagai sens traktor dapat dilihat pada Gambar 17. Di san an kanan dan besarnya tegangan yang dikelua but diberi tegangan 4 Volt.
a potensiometer pada setiap posisi belok kiri da
Sensor untuk memandu traktor pada lintasan yang diinginkan. Dalam hal ini dipilih Proximty Detector Sensor seperti tampak pada Gambar 19. Sensor ini dapat mendeteksi benda tanpa menyentuh benda tersebut. Sensor ini sangat peka pada warna putih sehingga penggunaan pita putih sangat tepat. Cara kerja proximiti dengan memancarkan inframerah ke target sensor (pita putih) dan langsung diterima oleh reciver yang bersebelahan dengan transmiternya.
Gambar 19 Sensor infrared yang digunakan pada awal penelitian
Gambar 20 menunjukkan komponen motor driver dan konverter ADDA jenis Ni-DAQ 6008. Ni-DAQ merupakan perangkat penghubung antar perangkat keras dengan komputer. Data dapat keluar dan masuk dengan jenis analog maupun digital di mana pada sistem kontrol tersebut sinyal kondisi diterima dari proximiti dan diteruskan ke komputer untuk selanjutnya diolah.
Gambar 20 Diagram DAQ 6008 dan IRP detector serta foto instalasi motor driver dan ADDA konverter jenis Ni-DAQ 6008
Pengolahan data se traktor dapat melintasi ga sebelah luar sebesar 6.8 cm beberapa hal yaitu kondisi
sesuai instruksi untuk kerja motor pengge Ni-DAQ kemudian ke motor driver yang meme motor penggerak roda kemudi.
rol kemudi traktor secara mekatronis pada trakt pengujian menggunakan LabVIEW sebag
environment terbuka untuk aplikasi serta mengontrol.
ja Lapangan terhadap Prototip pada Lintasan
hubungkan seluruh perangkat di atas ke kompute enggunakan perangkat lunak LabVIEW. Uji s lintasan, yaitu lintasan lurus sepanjang 13 m at lingkaran berjari-jari 500 cm (Gambar 21).
ngujian lintasan aspal lurus sejauh 13 meter dan be dengan jari-jari 500 cm
pada lintasan lurus (Gambar 22), menunjukka garis yang ditentukan dan terjadi simpangan cm dan sebelah dalam 6.1 cm. Simpangan terja isi permukaan dan kemiringan permukaan jala
karena permukaan jalan tidak rata dan belubang-lubang kecil serta kondisi cahaya lingkungan.
Gambar 22 Hasil pengujian lurus di lintasan aspal -1350
-850 -350 150 650
-800 -300 200 700 1200 X (cm)
Y (cm)
Lintasan acu Hasil 1
Gambar 23 Hasil pengujian belok lintasan aspal dengan jari-jari 500 cm
Pada lintasan belok (Gambar 23) terjadi simpangan terbesar sebelah luar sebesar 4.5 cm dan dalam 7.0 cm. Simpangan terjadi karena permukaan jalan yang tidak rata dan miring. Dari sisi sensor proximity, di mana sensor bekerja dengan pantulan cahaya infra merah pada kondisi lingkungan dengan intensitas cahaya yang sangat besar akan sangat mempengaruhi kerja dari sensor. Di samping itu selama ini penggunaan sensor lebih banyak digunakan di dalam ruang (indoor).
Kinerja Penggunaan RTK-DGPS pada Otomasi Kemudi Traktor 4 Roda
Penggunaan RTK-DGPS disini adalah menggantikan posisi sensor proximiti, yang fungsinya untuk mengetahui posisi berdasarkan koordinat bumi.
0 100 200 300 400 500 600
(cm)
Y(cm)
X
Posisi absolut dari penerima GPS ditentukan menggunakan teknik triangulasi sederhana berdasarkan waktu tempuh sinyal radio yang secara unik dikodekan dari satelit. Masalah utama dari sistem GPS meliputi: i) waktu sinkronisasi antara satelit dan penerima, ii) lokasi real time satelit yang tepat, iii) sulit untuk mengukur waktu propagasi sinyal iv) gangguan (noise) elektromagnetik dan pengaruh lain seperti penyumbatan sinyal periodik oleh pohon-pohon dan bangunan saat platform pengujian bergerak di bawah atau di dekat pohon-pohon atau bangunan. Kekurangan utama yang lain dari GPS adalah degradasi sinyal terjadi ketika penerimaan dari satelit tujuan asal menunjukkan sinyal kurang dari empat atau ketika interferensi. Hal tersebut terjadi pada jarak yang pendek dalam suatu lintasan perjalanan kendaraan otomasi. Kondisi tersebut menunjukkan bahwa sebuah sensor yang dapat diandalkan dapat menggantikannya untuk perjalanan lintasan pendek.
Gambar 24 Aplikasi RTK-DGPS Leica GS 10 padatraktor 4 roda
koordinat akhir sebagai lintasan yang diinginkan (Gambar 24). Pada pengujian ini digunakan Leica GS10.
Gambar 25 Aplikasi RTK-DGPS Leica GS 15 padatraktor 4 roda
Seluruh pengujian di lahan menggunakan Leica GS15 (Gambar 25). Pengujian dilakukan dengan dua landasan yaitu aspal dan lahan kering. Pengujian di lahan dilakukan dengan perlakuan tanpa beban dan dengan beban, beban pada pengujian ini digunakan bajak singkal.
Gambar 26 Hasil pengujian di aspal 1 9274130
9274140 9274150 9274160 9274170 9274180 9274190 9274200 9274210 9274220
691080 691090 691100
N
o
rt
h
in
g
(
m
)
Gambar 27 Hasil pengujian di aspal 2
Hasil pengujian di lintasan aspal dengan menggunakan sensor RTK-DGPS (Gambar 26 dan 27), terjadi simpangan. Pada gambar 26 simpangan arah kanan lintasan sebesar 223 cm, sedang arah kiri lintasan sejauh 89 cm. Pada gambar 27, hampir tidak terjadi simpangan, simpangan terjadi diujung lintasan.
Bila dilihat gambar 26 dan 27, simpangan terjadi di lokasi yang sama diakhir lintasan. Hal tersebut terjadi karena sekitar posisi terdapat pohon yang merupakan salah satu penyebab hilangnya sinyal satelit dan berdampak pada keteltian DGPS.
9274135 9274155 9274175 9274195 9274215 9274235
691070 691090 691110
N
o
rt
h
in
g
(
m
)
Easting (m)
Series1
Gambar 28 Hasil pengujian di lahan tanpa bajak 1
9274170 9274175 9274180 9274185 9274190 9274195 9274200 9274205 9274210
691050 691055 691060 691065
N
o
rt
h
in
g
(
m
)
Easting (m)
real
Gambar 29 Hasil pengujian di lahan tanpa bajak 2
Pada pengujian di lahan tanpa beban (bajak) (Gambar 28 dan 29). Pada gambar 28, hampir tidak terjadi simpangan kecuali pada akhir lintasan. Pada gambar 29, terjadi simpangan sebelah kanan sebesar 171 cm, sedang sabelah kiri sejauh 415 cm. simpangan sebelah kiri terjadi di ujung lintasan seperti halnya juga terjadi digambar 28.
Bila diperhatikan kedua gambar tersebut, terlihat bahwa sistem kontrlo kemudi berfungsi dimana traktor kembali ke lintasan acu setelah menyimpang.
Gambar 30 Hasil pengujian di lahan dengan beban pembajakan tanah 1 menggunakan bajak singkal
9274170 9274175 9274180 9274185 9274190 9274195 9274200 9274205 9274210 9274215
691050 691055 691060 691065
N
o
rt
h
in
g
(m
)
Easting (m)
Series1Gambar 31 Hasil pengujian di lahan dengan beban pembajakan tanah 2 menggunakan bajak singkal
Pada gambar 30 dan 31 menggambarkan hasil pengujian dengan menggunakan implement bajak singkal. Seperti hasil pengujian sebelumnya, pada pegujian ini masih terjadi penyimpangan. Gambar 30 menyatakan besar simpangan untuk sebelah kanan sebesar 75 cm dan kiri sebesar 11 cm. Sedangkan pada gambar 31 terjadi simpangan sebesar 123 cm disebelah kanan, sedangkan disebelah kiri sebesar 56 cm.
Secara umum dari gambar26 hingga 31 dapat dilihat bahwa sistim kontrol berfungsi dengan baik. Masalah yang terjadi pada umunya pada sistem sinyal sensor DGPS dan sistim GPRS yang mengirim sistem koreksi NTRIP.