SISTEM PENGENDALI KEMUDI TRAKTOR OTOMATIS
EMPAT RODA PADA OPERASI PENGOLAHAN TANAH
SETYA PERMANA SUTISNA
SEKOLAH PASCASARJANA INSTITUT PERTANIAN BOGOR
PERNYATAAN MENGENAI TESIS DAN
SUMBER INFORMASI SERTA PELIMPAHAN HAK CIPTA*
Dengan ini saya menyatakan bahwa tesis berjudul Sistem Pengendali Kemudi Traktor Otomatis Empat Roda Pada Operasi Pengolahan Tanah adalah benar karya saya dengan arahan dari komisi pembimbing dan belum diajukan dalam bentuk apa pun kepada perguruan tinggi mana pun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir tesis ini.
Dengan ini saya melimpahkan hak cipta dari karya tulis saya kepada Institut Pertanian Bogor.
Bogor, Oktober 2014
Setya Permana Sutisna
RINGKASAN
SETYA PERMANA SUTISNA. Sistem Pengendali Kemudi Traktor Otomatis Empat Roda Pada Operasi Pengolahan Tanah. Dibimbing oleh I DEWA MADE SUBRATA dan RADITE PRAEKO AGUS SETIAWAN.
Potensi keuntungan traktor otomatis yaitu dapat meningkatkan produktivitas, akurasi, efisiensi, dan keamanan operator. Penelitian traktor otomatis di IPB terdahulu telah membuat rancang bangun sistem kemudi otomatis traktor pertanian. Beberapa bagian kemudi yang dikendalikan yaitu setir, kopling, akselerasi, dan tuas implemen. Traktor dapat bergerak secara otomatis mengikuti lintasan acuan tanpa dikemudikan operator. Kendala yang dihadapi yaitu traktor hanya dapat bergerak maju sehingga ketika traktor berbelok ke lintasan berikutnya terdapat bagian lahan yang tidak terolah. Selain itu, penentuan orientasi traktor menggunakan dua titik posisi traktor menjadi kurang akurat ketika pengiriman pesan data posisi oleh GPS terganggu. Kebutuhan jarak yang cukup besar untuk menyesuaikan posisi traktor setelah proses belok.
Tujuan penelitian ini mengembangkan sistem pengendalian dan model prediksi posisi traktor untuk meningkatkan presisi dan akurasi. Modifikasi algoritma dan pengendali sistem kemudi untuk meningkatkan kemampuan manuver traktor otomatis dan penyesuaian posisi pada lintasan acuan. Hasil simulasi dan pengujian riil di lapangan dibandingkan trhadap model prediksi posisi dan menguji kinerja traktor otomatis untuk aplikasi pengolahan tanah dengan pola lintasan kerja
continuous.
Traktor yang digunakan dalam penelitian ini adalah traktor empat roda 45 HP yang telah dimodifikasi menjadi traktor otomatis. Sensor navigasi yang digunakan adalah RTK DGPS dengan ketelitian 3-5 cm. Pemrosesan data GPS menjadi informasi posisi menggunakan komputer (laptop)yang digunakan untuk menghasilkan perintah gerak bagian – bagian kemudi. Masing-masing bagian sistem kemudi digerakkan dengan menggunakan sumber tenaga penggerak motor DC. Pengendalian setir terus dilakukan selama traktor berjalan agar traktor dapat mengikuti lintasan acuan dengan tepat. Penentuan besar sudut roda kemudi yang harus terbentuk dihitung berdasarkan simpangan dan orientasi traktor.
Pengujian lintasan lurus dilakukan dengan panjang lintasan 30 m dan kecepatan maju traktor 0.5 m/s menghasilkan besar simpangan rata-rata terhadap lintasan acuan sebesar 8.62 cm. Pengujian pengolahan tanah dilakukan pada lahan ukuran 30 m x 20 m dengan menggunakan implemen bajak rotari dan bajak piring. Hasil pengujian diperoleh simpangan rata-rata sebesar 12.7 cm untuk bajak rotari dan 18.8 cm untuk bajak piring. Berdasarkan pengujian riil di lapangan terhadap simulasi model prediksi posisi traktor menunjukkan bahwa model prediksi posisi dapat ditambahkan pada program pengendalian. Simpangan posisi hasil simulasi model prediksi terhadap posisi riil pengujian lintasan lurus yaitu 13.4 cm. Penambahan model prediksi tersebut dapat mengurangi kesalahan penentuan orientasi traktor ketika pengiriman data GPS terganggu.
SUMMARY
SETYA PERMANA SUTISNA. Tracking Control System of Autonomous Four Wheel Tractor for Soil Tillage Operation. Supervised by I DEWA MADE SUBRATA and RADITE PRAEKO AGUS SETIAWAN.
Automated tractor could increase productivity, accuracy, efficiency, and safety during operation. Previous study was about controlled steering system on IPB, which controlled the tractor operation on steering wheels, clutch, acceleration, and lever implemen. Tractor could follow reference trajectory without operator. However, in previous study the tractor only moved forward, so when the tractor turned into next track during tillage operation there were some sections of land that were not plowed. In addition, the tractor orientation was determinated using two points of tractor position became to be less accurate when the GPS data interupted. As the result, tractor took longer distances to make its position after turn.
The purpose of this study were to develop control system and prediction models of tractor position, so they improved precision and accuracy of tracking. Algorithm modification and controlled steering system were used to increase the maneuverability of autonomous tractor and the adjustment of position on reference trajectory. The simulation was done and the results were compared with actual test. The prediction models and performance test of autonomous tractor were tested in a field for tillage application using continous pattern.
This study used a four-wheel 45 HP tractor that has been modified into an autonomous tractor. Navigation sensor used was a RTK DGPS with accuracy of 3-5 cm. GPS data processing used a computer (laptop) to calculate data information that was used to generate the motion command of steering system. Each part of the steering system was drived using a DC motor. Steering wheels were controlled continually so tractor could follow the reference trajectory accurately. Determination of steering wheel angle was calculated based on the position deviation and tractor orientation.
Straight-line path testing used a 30 m path and 0.5 m/s of tractor speed. The average error of the test results was 8.6 cm. The soil tillage was tested on 30 m x 20 m of field using rotary tiller and disc plow which determinated an average error of 12.7 cm for rotary tiller and 18.8 cm for disc plow. The deviation between the actual position and simulation model was 13.4 cm. The addition of these prediction models could reduce the error of tractor orientation determining when the GPS data transmission was interrupted.
© Hak Cipta Milik IPB, Tahun 2014
Hak Cipta Dilindungi Undang-Undang
Tesis
sebagai salah satu syarat untuk memperoleh gelar Magister Sains
pada
Program Studi Teknik Mesin Pertanian dan Pangan
SISTEM PENGENDALI KEMUDI TRAKTOR OTOMATIS
EMPAT RODA PADA OPERASI PENGOLAHAN TANAH
SEKOLAH PASCASARJANA INSTITUT PERTANIAN BOGOR
BOGOR 2014
Judul Tesis : Sistem Pengendali Kemudi Traktor Otomatis Empat Roda Pada Operasi Pengolahan Tanah
Nama : Setya Permana Sutisna NIM : F151114011
Disetujui oleh Komisi Pembimbing
Dr Ir I Dewa Made Subrata, MAgr Ketua
Dr Ir Radite Praeko Agus Setiawan, MAgr Anggota
Diketahui oleh
Ketua Program Studi
Teknik Mesin Pertanian dan Pangan
Dr Ir Y. Aris Purwanto, MSc
Dekan Sekolah Pascasarjana
Dr Ir Dahrul Syah, MScAgr
PRAKATA
Puji dan syukur penulis panjatkan kepada Allah subhanahu wa ta’ala atas segala karunia-Nya sehingga karya ilmiah ini berhasil diselesaikan. Tema yang dipilih dalam penelitian yang dilaksanakan sejak bulan Mei 2013 ini Otomatisasi Traktor Pertanian, dengan judul Sistem Pengendali Kemudi Traktor Otomatis Empat Roda Pada Operasi Pengolahan Tanah.
Terima kasih penulis ucapkan kepada bapak Dr Ir I Dewa Made Subrata, MAgr selaku ketua komisi pembimbing, bapak Dr Ir Radite Praeko Agus Setiawan, MAgr selaku anggota komisi pembimbing, Dr Ir Wawan Hermawan, MS selaku penguji luar komisi, dan Dr Ir Y Aris Purwanto, MSc selaku ketua program studi yang telah banyak memberi saran serta arahan dalam menyelesaikan tesis ini. Ungkapan terima kasih juga penulis sampaikan untuk kedua orang tua penulis bapak Entis Sutisna dan ibu Subaedah Ruku, istri penulis Irna Erliana, dan anak penulis Kayla Anugrah Permana atas semua doa, kasih sayang, dan kesabarannya. Tidak lupa juga penulis ucapkan terima kasih kepada pihak-pihak yang telah membantu selama penelitian, Bapak Wana, Mas Firman, Mas Darma dan Bapak Joko selaku teknisi lab. Lapangan Siswadhi Supardjo dan lab. Instrumentasi dan Kontrol, kemudian ucapan terima kasih kepada kak Cecep, Sigit Gunawan, Andreas, Dodik, Tian, Mas Tri, Bu Reni, dan seluruh teman-teman program TMP angkatan 2011 dan 2012 atas bantuan dan semangatnya selama penelitian dan penyusunan tesis. Terima kasih juga penulis sampaikan atas dibiayainya kegiatan penelitian ini oleh I-MHERE project B.2.C IPB dan Penelitian BOPTN dana DIPA IPB 2013
Semoga karya ilmiah ini bermanfaat.
Bogor, Oktober 2014
DAFTAR ISI
DAFTAR TABEL vi
DAFTAR GAMBAR vi
DAFTAR LAMPIRAN vi
1 PENDAHULUAN 1
Latar Belakang 1
Perumusan Masalah 2
Tujuan Penelitian 3
2 TINJAUAN PUSTAKA 3
Traktor Otomatis 3
Global Positioning System (GPS) 5
Sistem Kontrol 7
Pengolahan Tanah 8
3 METODE 9
Waktu dan Tempat 9
Alat dan Bahan 9
Tahapan Penelitian 10
Rancangan Sistem 12
Pengujian 20
Pengukuran Error 22
4 HASIL DAN PEMBAHASAN 23
Sistem Pengendali 23
Pengujian Lintasan Lurus 29
Pengujian Belok 33
Pengujian Pengolahan Tanah 35
5 SIMPULAN DAN SARAN 37
Simpulan 37
Saran 38
DAFTAR PUSTAKA 38
LAMPIRAN 40
DAFTAR TABEL
1 Hasil Uji Kebutuhan Waktu Gerakan Unit Pengendali 23
DAFTAR GAMBAR
1 Penyesuaian Traktor Pada Lintasan Lurus Setelah Belok (Rahman 2013) 2 2 Traktor Otomatis yang Dikembangkan Di IPB (Rahman 2013) 4
3 Ilustrasi Penggunaan RTK DGPS (Wolfgang 2000) 7
4 Sistem Kontrol Loop Tertutup Kemudi Traktor (Annas 2012) 7
5 Pola Lintasan Traktor (Hunt 2001) 8
6 Layout Unit Pengendali Traktor Otomatis 9
7 Bagan Alir Proses Penelitian 10
8 Sistem Pengendalian Traktor Otomatis 12
9 Algoritma Pengendalian Gerak Maju Traktor Mengikuti Lintasan Lurus 15 10 Penentuan Orientasi Traktor Dari Perbandingan Dua Titik Posisi 16
11 Pola Belok di Ujung Lintasan (Nagasaka 2004) 17
12 Algoritma Pengendalian Traktor Mengolah Tanah 18
13 Sketsa Penentuan Lintasan Olah 19
14 Model Kinematik Kendaraan Kemudi Roda Depan (Sutiarso et al. 2001) 20
15 Pola Jalur Kerja Pengujian Traktor 21
16 Proses Pengambilan Contoh Tanah (Kurnia 2006) 22
17 Algoritma Pengendali Setir 24
18 Kalibrasi Pengendali Setir 24
19 Algoritma Pengendali Akselerasi 25
20 Algoritma Pengendali Tuas Implemen 26
21 Algoritma Pengendali Rem 27
22 Algoritma Pengendali Pedal Kopling 28
23 Algoritma Pengendali Tuas Persenling 29
24 Pengujian Pergerakan Traktor Lintasan Lurus Pada Posisi Awal Segaris
Lintasan Acuan 30
25 Pengujian Pergerakan Traktor Dari Posisi Kanan Sejajar Lintasan Acuan
Berjarak 5 m 31
26 Pengujian Pergerakan Traktor Dari Posisi Kiri Sejajar Linatasan Acuan
Berjarak 5 m 32
27 Simulasi Pemilihan Gerakan Belok Traktor 33
28 Hasil Pengujian Belok 34
29 Pergerakan Traktor Hasil Pengujian Lapangan 35
30 Lahan Hasil Pengujian Pembajakan Bajak Rotari dan Bajak Piring 36
31 Contoh Data Gps Dalam Format "GPGGA" 37
DAFTAR LAMPIRAN
1 Deskripsi Pesan GPS Tipe “GPGGA” 40
2 DT AVR ATMEGA 128 41
4 EMS 30A H-Bridge 43
5 EP50S8-1024-2R-P-24 Autonics Absolute Encoder 44
6 Hasil Pengukuran Kadar Air Tanah Untuk Pengujian Tanpa
Menggunakan Implemen 45
7 Hasil Pengukuran Kadar Air Tanah Untuk Pengujian Menggunakan
Implemen Bajak Piring 45
8 Hasil Pengukuran Kadar Air Tanah Untuk Pengujian Menggunkana
PENDAHULUAN
Latar Belakang
Otomatisasi pengoperasian traktor telah berkembang pesat sejak beberapa tahun terakhir. Penelitian umumnya dilakukan di negara-negara maju seperti USA, Japan, Swedia, dan negara maju lainnya sebagai upaya untuk mengatasi kelangkaan tenaga kerja di bidang pertanian. Potensi keuntungan traktor otomatis yaitu dapat meningkatkan produktivitas, akurasi, efisiensi, dan keamanan operator (Scarlet 2001). Perkembangan bidang elektronik, komputer, dan teknologi komputasi menjadi inspirasi para peneliti untuk mengembangkan traktor otomatis. Traktor otomatis saat ini menjadi salah satu hal yang penting dalam pertanian presisi.
Banyak faktor yang menjadi hambatan dalam pengendalian traktor otomatis (Ming Li et al. 2009), seperti wilayah kerja yang sangat luas, permukaan tanah tidak rata maupun datar, slip roda, serta tergantung pada operasi kerja atau implemen. Faktor tersebut membuat pengendalian traktor otomatis menjadi sulit. Hal ini menjadikan traktor otomatis membutuhkan biaya yang cukup tinggi.
2
lintasan seperti terlihat pada Gambar1. Pada Gambar 1, arah traktor datang dari atas setelah selesai berbelok dan bergerak maju menuju ke bawah.
Gambar 1 Penyesuaian traktor pada lintasan lurus setelah belok (Rahman 2013) Pengembangan traktor otomatis terus dilakukan agar didapatkan traktor yang lebih presisi, meskipun penelitian mengenai traktor otomatis telah menghasilkan traktor yang dapat berjalan sendiri tanpa operator. Pergerakan traktor otomatis dalam pengolahan tanah harus dikendalikan secara presisi dan akurasi yang tinggi agar tidak ada tanah yang tidak terolah dan memberikan hasil yang lebih baik dibandingkan dengan menggunakan operator. Penelitian ini melanjutkan penelitian Rahman (2013) untuk mengembangkan sistem pengendali kemudi traktor agar dapat mengikuti jalur kerja lintasan lurus dari posisi tidak segaris pada jarak tertentu dan belok. Pengembangan yang dilakukan agar diperoleh simpangan yang lebih kecil dan pemodelan yang dapat digunakan untuk memprediksi posisi traktor. Pengujian dilapangan dilakukan untuk mengetahui ketepatan traktor dalam mengikuti lintasan yang telah dibuat dan menguji model prediksi dengan membandingkan hasil simulasi dan pengujian riil dilapangan.
Rumusan Masalah
3 1. Pengendalian tuas transmisi belum dilakukan sehingga traktor hanya dapat bergerak maju sehingga ketika traktor berbelok ke lintasan berikutnya terdapat bagian lahan yang tidak terolah.
2. Orientasi traktor dihitung dari dua titik posisi traktor yang diperoleh dari pembacaan data GPS. Penentuan orientasi mejadi kurang tepat ketika pengiriman pesan data posisi oleh GPS tertanggu.
3. Penyesuaian traktor dari posisi di luar garis lintasan acuan lurus menuju lintasan acuan membutuhkan jarak yang besar terutama setelah proses belok dan berpindah lintasan.
Tujuan
1. Mengembangkan sistem pengendalian dan model prediksi posisi traktor untuk meningkatkan presisi dan akurasi mengikuti lintasan lurus dan belok pada traktor otomatis
2. Modifikasi algoritma dan pengendali sistem kemudi untuk meningkatkan kemampuan manuver traktor otomatis dan penyesuaian posisi pada lintasan acuan.
3. Membandingkan hasil simulasi dan pengujian riil di lapangan terhadap model prediksi posisi dan menguji kinerja traktor otomatis untuk aplikasi pengolahan tanah dengan pola lintasan kerja continuous
TINJAUAN PUSTAKA
Traktor Otomatis
Istilah untuk traktor otomatis secara intenasional cukup beragam diantaranya yaitu agricultural vehicle autonomous giudance, smart tractor,
autopilot tractor, dan automated tractor. Walaupun menggunakan istilah yang berbeda, menurut Ming Li (2009) pengertian istilah tersebut tetap sama yaitu traktor yang dapat beroperasi atau bekerja sendiri. Menurut Ming Li terdapat beberapa bagian utama dalam sebuah traktor otomatis yaitu sensor navigasi, computational methods, navigation planners (perencana navigasi), dan steering controler.
Sensor navigasi dapat berupa machine vision, GPS, sensor berbasis laser, sensor internal, dan geomagnetic direction sensor (GDS). Machine vision
merupakan sensor citra berupa kamera yang berfungsi untuk mengetahui halangan pada jalur baris. GPS adalah penunjuk posisi mendasar lokasi dalam global. Sensor navigasi bebasis laser baik digunakan untuk penunjukan wilayah khusus dan sangat membantu saat sinyal GPS melemah. Sensor internal berfungsi untuk mengetahui atau mengukur status kendaraan. GDS merupakan magnetometer yang berhubungan dengan magnet bumi dan hampir sama dengan kompas elektronik.
4
untuk mengetahui jalur garis lintasan yang akan dilewati traktor. Kalman filter digunakan untuk menebak posisi dari sumber data GPS yang berubah-ubah.
Perencana navigasi adalah aturan penting untuk pengontrolan suatu traktor otomatis, yang menerjemahkan perubahan posisi. Pola kerja atau jalur rencana menjadi dasar perencanaan navigasi. Steering controler merupakan pengontrolan aktuator traveling speed, kemudi, serta peralatan operasi. Kebanyakan dari traktor otomatis menggunakan beberapa metode seperti PID, FPID, maupun fuzzy logic.
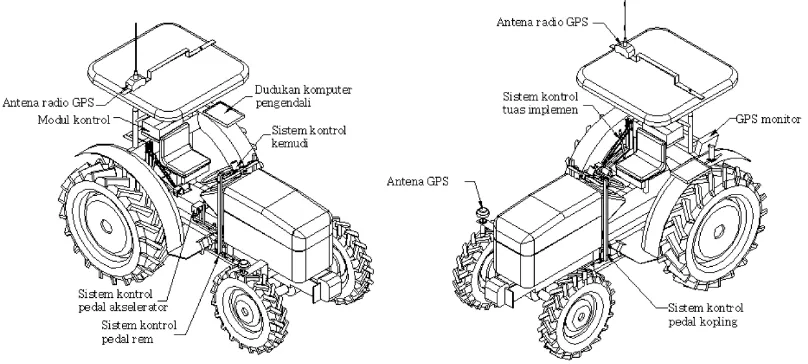
Pengembangan traktor otomatis di Indonesia khusunya di IPB dimulai oleh Desrial et al. (2010). Dalam penelitian tersebut telah berhasil dibuat algoritma pemrograman dan sistem navigasi GPS yang telah dapat bekerja dengan baik dan memberikan informasi arah yang tepat mengikuti jalur koordinat yang ditetapkan. Namun pada penelitian ini traktor masih dioperasikan oleh operator berdasarkan informasi sistem navigasi. Pengembangan pada traktor tersebut terus dilanjutkan hingga dapat beroperasi dan melakukan suatu pekerjaan pengolahan tanah tanpa dikemudikan oleh operator (Rahman 2013). Beberapa bagian sistem kemudi yang berhasil kendalikan secara otomatis meliputi setir, akselerator, pedal kopling, pedal rem, dan tuas implemen dapat dilihat pada Gambar 2. Hasil pengujian menunjukkan bahwa masing-masing unit kontrol telah bekerja dengan baik dan traktor dapat malakukan kerja pembajakan secara otomatis tanpa operator. Namun, perlu menambahkan sistem kontrol tuas transmisi dan memodifikasi sistem kontrol rem agar dapat bekerja secara terpisah antara rem kiri dan kanan agar gerakan manuver traktor dapat mejadi lebih baik. Selain itu, beberapa traktor otomatis lain yang telah berhasil dikembangkan diantaranya yaitu otomatisasi kemudi traktor mini 4 roda dengan bahasa pemrograman LabView (Annas 2012) dan pengendalian jarak jauh kemudi dan tuas akselerasi secara nirkabel menggunakan wireless gamepad interface (Bintarjo 2012).
5 perangkat Ni-DAQ. Perangkat yang dikontrol dalam penelitian ini adalah setir kemudi dan sensor yang digunakan berupa potensiometer linier. Sudut yang dibentuk dihitung berdasarkan simpangan yang terjadi terhadap lintasan set-point. Pengujian dilakukan pada lintasan garis lurus sepanjang 40 m dengan menggunakan implemen bajak serta tanpa implemen. Hasil pengujian menunujukkan simpangan maksimum yang dibentuk adalah sebesar 415 cm pada pengujian tanpa bajak dan 123 cm pada lintasan dengan menggunakan implemen bajak.
Bintarjo (2012) mengembangkan traktor dengan sistem kendali jarak jauh secara wireless. Pengendalian traktor dilakukan dengan menggunakan alat smart peripheral controller (SPC) wireless Gamepad interface yang berbentuk menyerupai joystick dalam permainan video game. Bagian traktor yang dikendalikan secara jarak jauh adalah kemudi (setir) dan tuas akselerator yang digerakkan oleh motor DC. Dalam penelitian ini pengendali jarak jauh traktor berhasil dapat bekerja dengan baik dengan jarak jangkauan radius 125 m.
Global Positioning System (GPS)
Menurut Wolfgang (2000) penggunaan GPS untuk kepentingan pribadi dimulai pada tahun 1995. Sejak pengenalan NAVSTAR-GPS (Navigation System with Time and Ranging – Global Positioning System) sebagai sistem yang berkembang cepat untuk aplikasi yang luas. GPS banyak digunakan diberbagai aplikasi seperti sistem navigasi mobil, pendekatan dan pendaratan peasawat, penelitian pengeboran lepas pantai, dan nagigasi untuk mesin pertanian lapangan.
Pembacaan data GPS memberikan informasi posisi dalam bentuk derajat bujur (longitude) dan lintang (latitude). Pada penggunaannya di lapangan koordinat tersebut harus ditransformasikan menjadi koordinat kartesian x dan y. UTM (Universal Transverse Mercator) merupakan sebuah sistem yang menggunakan koordinat kartesian dua dimensi untuk memetakan posisi di permukaan bumi. UTM membagi wilayah berdasarkan garis bujur menjadi 60 zona dengan lebar zona 6˚. Datum yang digunakan mengacu pada world geodetic system (WGS) 84 yang disepakati pada tahun 1984. Datum adalah parameter acuan yang digunakan untuk mendefinisikan geometri elipsoid bumi . Synder (1987) menyatakan bahwa nilai koordinat x dan y dapat dihitung menggunakan persamaan :
6
� = ′ ∅ ... (6) ′ = − ... (7)
= √ − ... (8)
= � [ − − − − ⋯ ∅ − + + + ⋯ sin ∅ + +
+ ⋯ sin ∅ − + ⋯ sin ∅ + ⋯] ... (9) di mana:
a = jari-jari equator bumi =6378206 m
b = jari-jari polar bumi= 6356583 m
Ø = derajat lintang (latitude) dalam radian λ = derajat bujur (longitude) dalam radian
λ0 = derajat meridian tengah (central meridian) dalam radian
N = radius kelengkungan (m)
M = jarak sebenarnya dari garis equator ke derajat lintang sepanjang garis meridian tengah.
A = delta derajat bujur.
Koordinat x dan y yang dihasilkan pada persamaan merupakan jarak dari garis equator dan garis meridian. Jarak antara dua titik dengan koordinat GPS dapat dipermudah dengan menggunakan persamaan yang dinyatakan oleh Srivastava et al. (2006). Persamaan tersebut adalah :
∆ = − = � � − � ... (10) ∆ = − = � � − � ... (11) di mana
Δx = delta posisi dalam bidang x (m) Δy = delta posisi dalam bidang y (m)
Kx = perubahan jarak pada tiap radian bujur (m/rad)
Ky = perubahan jarak pada tiap radian lintang (m/rad)
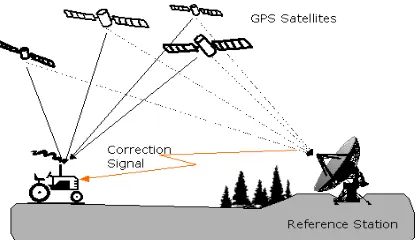
Berbagai usaha telah dilakukan untuk mengurangi error penentuan posisi dengan GPS menggunakan beberapa metode, salah satunya dengan sistem real time kinematik (RTK). Sistem RTK (Real-Time-Kinematic) adalah suatu akronim yang sudah umum digunakan untuk sistem penentuan posisi real-time secara differensial
7
real-time menggunakan sistem komunikasi data tertentu. Stasiun referensi dan pengguna harus dilengkapi dengan perangkat pemancar dan penerima data. Ilustrasi penggunaan RTK DGPS dapat dilihat pada Gambar 3.
Gambar 3 Ilustrasi penggunaan RTK DGPS (Wolfgang 2000)
Sistem RTK dapat digunakan untuk penentuan posisi obyek-obyek yang diam maupun bergerak, sehingga sistem RTK tidak hanya dapat merealisasikan survei GPS real time, tetapi juga navigasi berketelitan tinggi. Aplikasi-aplikasi yang dapat dilayani oleh sistem ini cukup beragam, antara lain staking out, penentuan dan rekonstruksi batas persil tanah, survei pertambangan, survei rekayasa dam utilitas, serta aplikasi-aplkasi lainnya yang memerlukan informasi posisi horisontal secara cepat (real-time) dengan ketelitian yang relatif tinggi dalam orde beberapa cm.
Sistem Kontrol
Sistem kontrol merupakan sekumpulan alur logika yang digunakan untuk mengendalikan, memerintah, dan mengatur keadaan dari seluruh sistem. Berdasarkan ada atau tidaknya umpan balik (feedback), Dorf (2005) membagi sistem kontrol menjadi dua jenis yaitu sistem kontrol loop tertutup (closed loop control system) dan sistem kontrol loop terbuka (open loop control system).
Gambar 4 Sistem kontrol loop tertutup kemudi traktor (Annas 2012)
Sistem kontrol loop terbuka lebih sederhana dan mudah, tetapi memiliki kelemahan dalam hal merespon gangguan dari luar sistem. Apabila terjadi gangguan sistem kontrol loop terbuka tidak memiliki mekanisme pengurangan
8
keluaranya diumpankan kembali ke masukan (koreksi) sehingga aksi pengontrolan selanjutnya dipengaruhi oleh nilai keluaran tersebut. Istilah loop tertutup bermakna menggunakan aksi umpan balik untuk memperkecil kesalahan sistem. Diagram sistem kontrol loop tertutup sistem kontrol kemudi traktor dapat dilihat pada Gambar 4.
Pengolahan Tanah
Pengolahan tanah merupakan kegiatan memanipulasi tanah secara mekanik untuk penanaman tanaman. Tujuan adalah untuk membangun sturktur tanah yang mendukung perkecambahan benih, tumbuhnya tumbuhan, dan pertumbuhan akar. Benih membutuhkan kelembaban dan panas untuk dapat berkecambah. Tanaman akan sulit tumbuh menembus tanah pada tanah yang keras sehingga dapat mengakibatkan kegagalan pertumbuhan. Pori-pori tanah dapat melancarkan aliran udara dan air yang memudahkan akar untuk menyerap unsur hara (Hunt 2001).
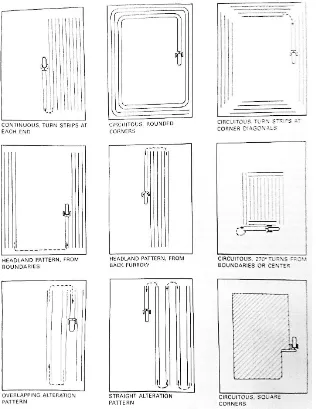
9 Pengolahan tanah dilakukan dengan menggunakan mesin pengolahan tanah yang ditarik oleh traktor. Kemudahan manuver traktor sangat diperlukan dilahan. Traktor didesain untuk dapat melakukan belok dengan radius yang pendek pada ujung lahan dan dapat mengikuti jalur pada baris tanaman. Pola lintasan traktor digunakan terdapat beberapa tipe seperti terlihat pada Gambar 5. Pemilihan pola yang digunakan disesuaikan dengan dengan keadaan lahan, peralatan, dan kerja yang dilakukan.
METODE PENELITIAN
Waktu dan Tempat
Penelitian ini dilakukan mulai April 2013 sampai Januari 2014. Kegiatan penelitian dibagi menjadi beberapa sub kegiatan yaitu kegiatan pembuatan rangkaian elektronik, pembuatan model simulasi, pembuatan program pengendalian, pengujian lapang, dan analisis data serta penyusunan laporan. Kegiatan pembuatan rangkaian elektronik dilakukan mulai April 2013 sampai Agustus 2013 di Lab. Bengkel Metanium Teknik Mesin dan Biosistem IPB. Pembuatan program pengendalian dilakukan mulai Agustus 2013 sampai November 2013 di Lab. Bengkel Metanium Teknik Mesin dan Biosistem IPB. Pengujian dilakukan mulai November 2013 sampai Desember 2013 di Lab. Siswadhi Suparjo Departemen Teknik Mesin dan Biosistem IPB. Analisis data dan penyusunan laporan dilakukan mulai Desember 2013 sampai Januari 2014.
Gambar 6 Layout unit pengendali traktor otomatis
Alat dan Bahan
10
DT-AVR ATmega128, RTK-DGPS. Alat untuk membuat algoritma pengendalian adalah personal computer (laptop) dengan sofware Microsoft Visual Basic 6.0 dan Code Vision AVR. Alat yang digunakan untuk pengujian terdiri dari meteran, patok, dan kamera video. Pengujian kondisi tanah menggunakan alat penetrometer, ring sampel, oven, dan timbangan digital. Layout unit pengendali traktor otomatis dapat dilihat pada Gambar 6
Tahapan Penelitian
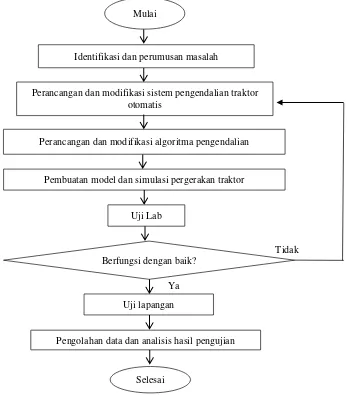
Secara umum penelitian ini terdiri dari empat tahapan, yaitu perumusan masalah, perancangan, pembuatan, dan pengujian. Tahapan penelitian dapat dilihat pada Gambar 7. Perumusan masalah dilakukan dengan mengidentifikasi masalah-masalah kekurangan dari traktor otomatis yang dilakukan pada penelitian sebelumnya (Rahman 2013). Secara umum traktor otomatis tersebut telah bekerja dengan baik.
Gambar 7 Bagan alir proses penelitian
a
Tidak Mulai
Identifikasi dan perumusan masalah
Perancangan dan modifikasi algoritma pengendalian
Pembuatan model dan simulasi pergerakan traktor
Uji lapangan
Pengolahan data dan analisis hasil pengujian
Selesai Uji Lab
Berfungsi dengan baik?
Perancangan dan modifikasi sistem pengendalian traktor otomatis
11 Algoritma pengendalian, sistem navigasi GPS, dan mekanisme telah bekerja dengan baik dan mengikuti koordinat yang telah ditetapkan. Pada proses belok traktor mengandalkan sudut maksimum roda depan dengan arah gerak maju tanpa memfungsikan pedal rem kanan dan kiri pada saat belok, mengakibatkan radius putar yang cukup besar sehingga traktor sulit berpindah pada jalur kerja terdekat. Besarnya radius putar mengakibatkan penelitian yang dilakukan Rahman (2013) menggunakan pola pengolahan tanah tepi. Untuk meningkatkan kemampuan manuver traktor maka perlu dilakukan pengendalian tuas transmisi maju-mundur dan pengendalian tuas rem kiri-kanan. Pengendalian dua mekanisme tersebut belum dilakukan sehingga modifikasi dilakukan pada kedua bagian tersebut. Bagian yang telah ada dan berfungsi dengan baik dipertahankan seperti semula dan tidak dilakukan perubahan.
Pengiriman data GPS yang tidak utuh membuat penentuan posisi traktor menjadi kurang tepat. Hal ini juga menurunkan ketepatan dalam penentuan arah pergerakan traktor yang menggunakan metode perbandingan dua titik posisi. Pengembangan model pergerakan traktor dapat dilakukan untuk dapat memprediksi posisi traktor sehingga dapat diperoleh simpangan yang lebih kecil. Pengujian di lapangan dilakukan untuk mengetahui ketepatan traktor dalam mengikuti lintasan yang telah dibuat dan menguji model prediksi dengan membandingkan hasil simulasi dan pengujian riil di lapangan.
Tahapan perancangan dilakukan untuk merancang sistem pengendalian traktor pada lintasan lurus, belok, mundur, hingga melakukan pengolahan tanah pada suatu lahan. Rancangan sistem pengendalian berupa perancangan alur proses pengendalian. Modifikasi maupun pembuatan rangkaian elektronik dan program pengendalian. Rangkaian elektronik yang dibuat meliputi: penyedia catu daya, rangkaian pengendali gerak motor DC dan rangkaian sensor.
Pengujian dilakukan dengan dua cara yaitu pengujian lab dan pengujian lapangan. Pengujian lab. dilakukan di lab. dengan mengangkat traktor sehingga keempat roda traktor tidak menyentuh tanah. Pengujian ini bertujuan untuk mengetahui apakah seluruh sistem pengendali dapat bekerja dengan baik. Setelah dipastikan seluruh sistem bekerja dengan baik dilakukan pengujian kerja di lapangan. Pengujian di lapangan meliputi pengujian lintasan lurus, pengujian belok dan mundur, serta pengujian pengolahan tanah.
Rancangan Sistem
12
mekanisme pengontrolan roda kemudi, pedal akselerator, pedal kopling, dan tuas implemen tidak dilakukan modifikasi. Hal ini berarti mekanisme tersebut dipertahankan dan tetap digunakan sesuai dengan yang telah dihasilkan dalam penelitian Rahman (2013).
Sensor navigasi berfungsi untuk mengetahui posisi tepat traktor untuk menentukan langkah yang harus dilakukan traktor selanjutnya. Pembacaan posisi dilakukan dengan menggunakan RTK-DGPS Reciever yang dihubungkan ke PC. RTK-DGPS Reciever yang digunakan dalam penelitian ini adalah jenis/tipe RTK-DGPS Outback® S3 GPS Guidance and Mapping System dengan tingkat ketelitian yang diharapkan sebesar 3 -5 cm. Data yang diterima kemudian dicocokkan dengan orientasi traktor yang kemudian menentukan langkah yang harus dilakukan traktor. Orientasi traktor diperoleh dari membandingkan posisi traktor saat ini terhadap posisi traktor sebelumnya. Posisi dan orientasi traktor dibandingkan terhadap jalur yang sebenarnya untuk menentukan besar putaran sudut setir kemudi. Kebutuhan kecepatan pembacaan GPS berbanding lurus dengan kecepatan maju traktor. Semakin lambat laju traktor dengan frekuensi pembacaan GPS yang sama, akurasi jalan traktor pada lintasan akan semakin tinggi. Frekuensi pembacaan dan pengiriman data GPS dalam penelitian ini digunakan frekuensi 5 Hz.
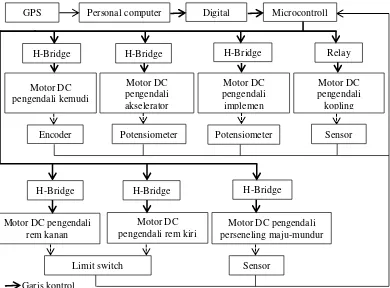
Gambar 8 Sistem pengendalian traktor otomatis
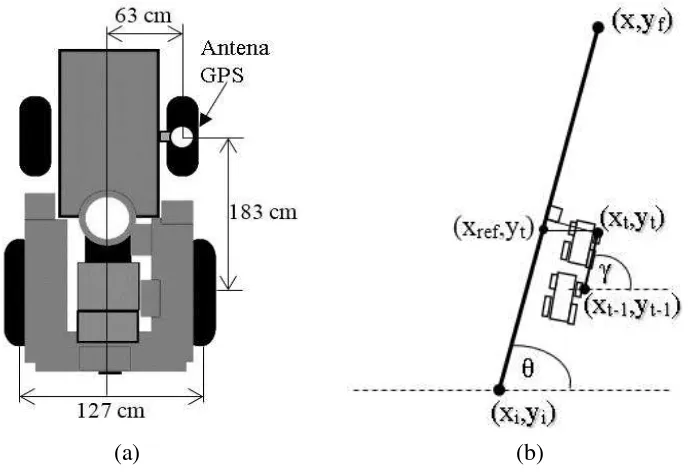
Antena GPS diletakkan di atas roda kanan depan sehingga posisi traktor yang terus terpantau merupakan posisi roda kanan depan traktor. Penempatan antena pada posisi tersebut karena untuk menghindari getaran berlebihan dan panas
H-Bridge
13 dari mesin jika diletakkan di tengah traktor yaitu di atas kap mesin. Posisi implemen dan bagian lain traktor diasumsikan mengikuti posisi traktor. Implemen bajak yang digunakan menggunakan penggandengan tiga titik gandeng sehingga arah implemen bajak tersebut mengikuti arah traktor.
Komputer berfungsi sebagai alat untuk komputasi dan interface. Komputasi adalah bagaimana mengolah data-data yang diterima oleh GPS sehingga menghasilkan suatu keputusan. Untuk menghasilkan suatu keputusan perlu dilakukan penyusunan algoritma pada komputer tersebut yang disusun dalam sebuah program aplikasi. Penyusunan aplikasi pengendalian traktor otomatis digunakan software Visual Basic 6.0.
Sistem aktuator berfungsi untuk menggerakkan mekanisme-mekanisme pada sistem kemudi traktor, yaitu setir, kopling, akselerator, perseneling, rem, dan implemen. Pergerakan sistem aktuator ini dikendalikan oleh microcontroller ATMEGA 128. Program pengendalian aktuator dibuat dengan Bahasa pemrograman C dengan menggunakan software CodeVision AVR. Program ini kemudian diunduh kedalam microcontroller. Sumber tenaga gerak aktuator bersumber dari motor DC yang dikontrol oleh microcontroler melalui H-Bridge. Besar dan arah gerakan sesuai dengan perintah hasil komputasi komputer.
Beberapa pergerakan mekanisme yaitu setir, implemen, kopling, akselerator, dan tuas transmisi dipantau dengan menggunakan sensor insternal. Sistem sensor internal berfungsi untuk mengetahui dan memberi umpan balik hasil gerakan aktuator. Sensor yang digunakan berupa limit switch, potensio meter, dan
rotary encoder. Limit switch digunakan pada aktuator yang digerakkan maksimum, yaitu pada kopling, rem, dan tuas transmisi. Potensiometer dapat digunakan untuk mengetahui posisi sudut tetapi dalam akurasi yang rendah. Potensiometer digunakan pada aktuator yang perlu diketahui posisi sudut tetapi tidak memerlukan ketelitian tinggi, yaitu pada akselerator dan implemen. Rotary encoder digunakan pada aktuator yang memerlukan akurasi yang tinggi, yaitu pada setir.
Metode Pengendalian Closed Loop
Pengendalian loop tertutup (closed loop) dilakukan pada pengendali stir/kemudi, tuas implemen, dan pedal gas. Pengolahan data GPS terhadap lintasan acuan dan orientasi traktor menghasilkan nilai sudut roda kemudi yang harus dibentuk. Besar sudut roda kemudi tersebut dikirim ke microcontroller yang kemudian membandingkan posisi roda kemudi yang telah dibentuk terhadap posisi roda kemudi seharusnya. Posisi sudut roda kemudi diketahui melalui pembacaan nilai encoder. Kalibrasi nilai encoder terhadap sudut roda kemudi dilakukan untuk mengetahui sudut roda kemudi yang terbentuk terhadap nilai encoder yang diterima. Selisih nilai sudut roda kemudi merupakan parameter yang digunakan untuk menentukan target baru pergerakan roda kemudi berdasarkan nilai encoder (En). Metode pengendalian loop tertutup yang digunakan berupa pengendalian on-off
dengan persamaan pengendalian :
14 di mana :
En : Nilai target encoder sekarang
En-1 : Nilai target encodr sebelumnya
: Nilai sudut roda kemudi sekarang
− : Nilai sudut roda kemudi sebelumnya A : Konstanta
Metode Pengendalian Open Loop
Pengendalian loop terbuka (open loop) yaitu menggerakkan suatu mekanisme tanpa adanya umpan balik. Pengendalian hanya menggerakkan pada posisi tertentu dan berhenti pada nilai tersebut yang telah dicapai tanpa melakukan gerakan koreksi. Pengendalian tuas-tuas kemudi lain dilakuakan dengan pengendalian loop terbuka, seperti pada pedal kopling, pedal rem, dan tuas transmisi. Pengendalian loop terbuka dilakukan karena tuas-tuas tersebut tidak memberikan pengaruh yang signifikan terhadap akurasi gerakan traktor mengikuti lintasan acuan. Selain itu, tuas-tuas tersebut juga tidak dikendalikan setiap saat yang dikendalikan pada kondisi tertentu.
Pengendalian Lintasan Lurus
Gerakan traktor dalam melakukan pengolahan tanah pada lahan terbagi menjadi dua gerakan yaitu gerakan maju pada lintasan lurus atau lintasan olah dan gerakan belok untuk berpindah pada jalur kerja berikutnya. Hal ini sangat penting karena pada lintasan lurus inilah dilakukan pembajakan/pengolahan tanah. Algoritma navigasi pengendalian kemudi traktor pada lintasan lurus dapat dilihat pada Gambar 9.
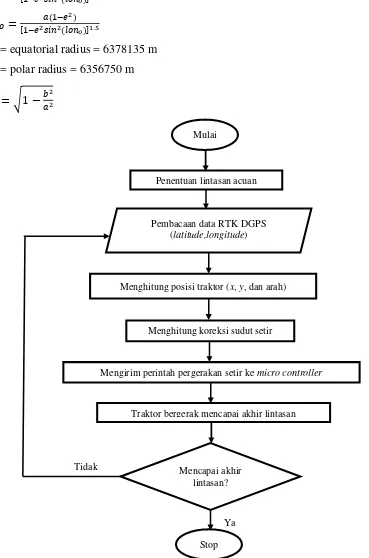
Pengendalian dimulai dari penentuan lintasan acuan. Lintasan acuan lurus dibentuk oleh dua titik koordinat, yaitu koordinat titik mulai dan koordinat titik akhir. Pembacaan data GPS memberikan informasi posisi dalam bentuk derajat bujur (longitude) dan lintang (latitude). Pada penggunaan di lapangan, koordinat tersebut harus ditransformasikan menjadi koordinat kartesian x dan y. UTM (Universal Transverse Mercator) merupakan sebuah sistem yang menggunakan koordinat kartesian dua dimensi untuk memetakan posisi di permukaan bumi (Snyder, 1987). Pada pengolahan data, derajat bujur dan lintang dikonversi menjadi koordinat kartesian x dan y dengan menggunakan Persamaan 13 dan 14 (Srivastava
et al. 2006)
15 di mana
Δx = delta posisi dalam bidang x (m) Δy = delta posisi dalam bidang y (m)
� =[ − c ] .
� =[ − − ] .
a = equatorial radius = 6378135 m
b = polar radius = 6356750 m
= √ −
Gambar 9 Algoritma pengendalian gerak maju traktor mengikuti lintasan lurus
Mulai
Pembacaan data RTK DGPS (latitude,longitude)
Menghitung posisi traktor (x, y, dan arah)
Menghitung koreksi sudut setir
Mengirim perintah pergerakan setir ke micro controller
Traktor bergerak mencapai akhir lintasan
Mencapai akhir lintasan?
Ya
Stop Tidak
16
Traktor terus berjalan maju mulai dari titik awal sampai ke titik akhir mengikuti lintasan acuan. Untuk mengarahkan traktor agar terus berada di lintasan acuan, setir digerakkan berdasarkan sudut setir (α). Sudut α ditentukan berdasarkan simpangan posisi dan arah traktor dari yang seharusnya. θ adalah sudut orientasi lintasan yang menjadi referensi arah jalan traktor dan sudut orientasi traktor adalah . Sudut orientasi traktor ( ) ditentukan dari dua posisi traktor. Model penentuan orientasi traktor dari dua titik posisi dan letak antena GPS dapat dilihat pada Gambar 10.
(a) (b)
Gambar 10 (a) Letak posisi antena GPS, (b) Penentuan orientasi traktor dari perbandingan dua titik posisi
Lintasan yang berbentuk garis lurus dengan kemiringan oriref
menghasilkan suatu persamaan garis linier. Persamaan garis linier digunakan untuk menentukan nilai x seharusnya (xref) ketika posisi traktor pada nilai yt. Perbedaan
nilai posisi x traktor terhadap referensi membentuk nilai simpangan (e). Nilai merupakan konversi nilai simpangan menjadi sudut. Setiap simpangan 1.5 m maka sudut roda kemudi diharapkan membentuk sudut maksimum yaitu 30o .Untuk menghitung penentuan sudut setir yang diberikan terhadap simpangan dihitung dengan menggunakan persamaan :
� = tan− |( − �)
( − �)| × � ... (15)
= tan− | �− �−
�− �− | × � ... (16)
= �
a � + ... (17)
17 ∆ = � − ... (20)
= ∆ + ... (21)
Pengendalian Lintasan Belok
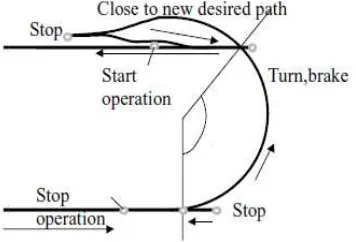
Saat mencapai ujung lintasan lurus, traktor melakukan gerakan belok untuk berpindah ke jalur olah berikutnya. Gerakan belok dirancang mengikuti pola belok Nagasaka (2004) seperti pada Gambar 11. Traktor bergerak maju dengan sudut putaran setir maksimum dengan arah sesuai dengan posisi lintasan lurus berikutnya. Saat belok juga dilakukan pengaktifan salah satu tuas rem kiri atau kanan sesuai dengan arah belok. Tuas rem kiri akan aktif jika traktor akan memutar ke kiri dan sebaliknya. Perintah ini akan terus dilakukan sampai terdeteksi traktor telah berbalik arah hadap. Setelah berubah arah traktor akan bergerak maju dengan sudut setir berubah-ubah sesuai dengan besar simpangan menyesuaikan posisi pada lintasan selanjutnya. Kemudian traktor bergerak mundur sampai pada titik mulai operasi pada jalur berikutnya dengan terus menyesuaikan posisi dan arah yang sesuai. Selama proses gerakan belok, implemen di naikkan sehingga traktor tidak melakukan operasi pembajakan.
Gambar 11 Pola belok di ujung lintasan (Nagasaka 2004)
Pengendalian Pengolahan Lahan
Algoritma pengendalian traktor dimulai dengan pembuatan peta jalur lintasan traktor yang akan dilalui seperti pada Gambar 12. Setelah pembuatan peta jalur lintasan traktor selesai, traktor mulai bergerak maju dengan menurunkan implemen terlebih dahulu. Selama bergerak maju traktor terus menyesuaikan posisi dan darah gerak sesauai dengan lintasan acuan yang harus diikuti. Ketika traktor sampai di ujung lintasan, implemen dinaikkan dan traktor melakukan pengendalian operasi belok hingga berbalik arah. Untuk menyesuaikan posisi traktor pada titik awal lintasan selanjutnya maka traktor bergerak mundur. Sebelum traktor kembali berjalan mengikuti lintasan acuan, implemen diturunkan dan traktor kembali bergerak maju sesuai lintasan acuan yang sesuai.
18
dengan lebar kerja implemen. Tahap selanjutnya adalah menghitung Δx dan Δy maksimum dari masing-masing titik yang berhadapan, dengan persamaan berikut (Rahman 2013):
∆ = − ... (22) ∆ = − ... (23) ∆ = − ... (24) ∆ = − ... (25)
19 Berdasarkan masing-masing delta yang ada, dihitung lebar olah lahan (l) dengan menggunakan persamaan berikut (Rahman 2013):
= � . [ √∆ + ∆ , √∆ + ∆ ] ... ………..(26) Dari persamaan (26), dipilih besaran yang terkecil sebagai lebar olah lahan. Berdasarkan lebar lahan yang ada ditentukan jumlah jalur yang akan diolah dengan persamaan sebagai berikut:
=
� ... (27) Setelah menghitung jumlah lintasan acuan pengolahan tanah, ditentukan titik-titik ujung tiap lintasan sebagai patokan untuk pengolahan secara berurutan dari lintasan. Sketsa peta jalur lintasan traktor yang akan dilaului dapat dilihat pada Gambar 13. Berikut persamaan untuk menentukan titik-titik ujung:
= + (( − × ∆ )⁄ ) ... (28) = + (( − × ∆ )⁄ ) ... (29) = + (( − × ∆ )⁄ ) ... (30) = + (( − × ∆ )⁄ ) ... (31) Dimana nilai n adalah indeks lintasan olah ke-n.
20
Model Simulasi
Mekanisme pengereman dan pengendalian sudut setir menyebabkan traktor tidak dapat berputar pada titik pusat traktor, sehingga saat berputar posisi traktor akan berubah yang disebut pergerakan non-holonomic. Kontrol gerak non-holonomic membutuhkan komputasi yang cukup rumit dibandingkan dengan gerak
holonomic (Sutiarso et al. 2001). Gambar 14 menunjukkan model kinematik kendaraan kemudi roda depan. Diasumsikan bahwa masing-masing roda berpindah dalam arah yang sama karena umumnya traktor berjalan lambat dan diasumsikan traktor berjalan pada area datar. Berdasarkan hubungan geometri, diperoleh persamaan (Sutiarso et al. 2001):
̇ = � cos , ̇ = � sin , ̇ = � tan / ... (32)
= + ∫ � cos , = + ∫ � sin , = ∫ � tan ... (33)
Gambar 14Model kinematik kendaraan kemudi roda depan (Sutiarso et al. 2001) Proses simulasi dilakukan untuk mengetahui perkiraan gerakan traktor dalam mengikuti lintasan acuan. Posisi (x,y) dan orientasi ( ) traktor selama pergerakan simulasi dihitung dengan menggunakan Persamaan 33. Penentuan sudut setir (α) dihitung dengan menggunakan Persamaan 21. Pada pengujian di lapangan,
posisi (x,y) traktor diperoleh dari pembacaan data GPS.
Pengujian
Pengujian Lintasan Lurus
21 dengan menempatkan traktor pada posisi awal lintasan lurus dan berimpit pada lintasan acuan. Traktor dijalankan secara otomatis dan berjalan sepanjang garis lurus tersebut sampai traktor mencapai titik akhir lintasan. Pengujian kedua dilakukan dengan menempatkan traktor pada posisi di luar garis lintasan acuan berjarak 5 m dan sejajar lintasan acuan. Pengujian ini dilakukan untuk mengetahui kemampuan (approaching) traktor menyesuaikan posisi pada lintasan acuan dan bergerak maju hingga mencapai ujung akhir lintasan.
Pengujian Belok
Pengujian belok dan mundur dilakukan untuk mengetahui kemampuan traktor berbelok setelah mencapai ujung lahan dan kemudian bergerak mundur untuk memposisikan traktor pada awal lintasan berikutnya. Traktor diposisikan pada titik sebelum ujung akhir lintasan lurus. Traktor bergerak maju untuk beberapa saat hingga terdeteksi akhir lintasan maju. Ketika terdeteksi ujung akhir lintasan maju, traktor berbelok dengan sudut roda depan maksimum hingga mendekati dan menyesuaikan pada lintasan acuan selanjutnya. Pengujian ini menhasilkan kebutuhan radius putar traktor untuk berbelok dan jarak awal lintasan acuan berikutnya terhadap posisi traktor mencapai posisi yang tepat pada lintasan acuan setelah berbelok. Jarak ini menjadi acuan besar jarak untuk gerakan mundur.
Pengujian Pengolahan Tanah
Pengujian pengolahan tanah satu lahan dilakukan untuk mengetahui kemampuan traktor berjalan sesuai pola lintasan operasi kerja pengolahan tanah yang telah ditentukan dari titik awal sampai titik akhir pembajakan. Lahan yang digunakan berbentuk segi empat 30 m x 20 m. Lebar kerja yang digunakan yaitu 1.6 m sesuai dengan lebar traktor dan jumlah lintasan yang harus dilalui sebanyak 12 lintasan pola jalur kerja traktor yang digunakan dapat dilihat pada Gambar 15. Pengujian pembajakan dilakukan dengan menggunakan bajak rotari dan bajak piring.
Gambar 15 Pola jalur kerja pengujian traktor
Pengujian Kondisi Tanah
Data pendukung yang diukur sebelum melakukan pengujian yaitu kadar air tanah dan kekuatan penetrasi tanah. Pengukuran tersebut dilakukan untuk
Masuk
H
ea
22
mengetahui kondisi tanah pada lahan yang akan diolah. Pengambilan sampel tanah dilakukan pada kedalaman 5 dan 10 cm dari permukaan tanah masing-masing di lima titik berbeda pada lahan. Metode pengambilan sampel tanah dapat dilihat pada Gambar 16. Sampel-sampeltersebut diukur beratnya ketika pengambilan kemudian dimasukkan ke oven untuk dikeringkan dengan suhu 110oC dan waktu ≥24 jam,
kemudian ditimbang kembali setelah dikeluarkan dari oven. Berdasarkan data tersebut, kadar air dapat dihitung dengan Persamaan 34.
�� = ��− �
� − � × ... (34) di mana:
Ka = kadar air (%)
mtb = berat basah (g)
mtk = berat kering (g)
mr = berat ring sampel(g)
Gambar 16 Proses pengambilan contoh tanah (Kurnia 2006)
Pengukuran Error
23
HASIL DAN PEMBAHASAN
Sistem Pengendali
Semua unit sistem pengendalian gerak tuas-tuas kemudi diuji untuk memastikan semua sistem pengendali dapat bekerja dengan baik. Salah satu unit yang tidak dapat bekerja dengan baik akan menyebabkan keseluruhan sistem pengendalian traktor otomatis tidak dapat berjalan dengan baik. Untuk mengetahui semua unit pengendali dapat bekerja dengan baik maka dilakukan pengujian terhadap waktu yang diperlukan untuk pergerakan masing-masing tuas dan keberhasilan pengendali tersebut. Pengukuran lama pergerakan diperlukan untuk mengetahui waktu tunggu (delay time) untuk melaksanakan perintah-perintah selanjutnya. Selain itu, lama pergerakan juga berfungsi untuk mengulur pergerakan unit pengendali yang tidak dapat bergerak secara bersamaan seperti pada unit pengendali kopling dan transmisi. Hasil uji kebutuhan waktu unit sistem pengendali dapat dilihat pada Tabel 1. Sebelum unit transmisi digerakkan, pergerakan kopling harus dipastikan selesai sampai menekan limit switch. Sebaliknya, ketika tuas kopling akan dinaikkan maka tuas transmisi harus dipastikan telah selesai bergerak. Tabel 1 Hasil uji kebutuhan waktu gerakan unit pengendali
Unit Pengendali Pergerakan Rata-rata Waktu
(s)
Tuas transimisi Netral-Mundur 0.2
Netral-Maju 0.2
Maju-Mundur 0.4
Pedal akselerasi 1000-2500rpm 0.5
2500-1000rpm 0.5
Pedal rem kiri Atas-Bawah 0.5
Bawah-Atas 0.5
Pedal rem kanan Atas-Bawah 0.4
Bawah-Atas 0.3
24
roda depan. Hasil pembacaan sensor dijadikan sebagai umpan balik ketercapaian posisi sudut roda depan. Algoritma pengendali setir dapat dilihat pada Gambar 17.
Gambar 17 Algoritma pengendali setir
Hubungan antara nilai encoder terhadap posisi sudut roda kemudi dapat diketahui melalui proses kalibrasi.
Gambar 18 Kalibrasi pengendali setir
25 Kalibrasi dilakukan dengan mengukur nilai yang dibentuk oleh posisi sudut roda kemudi terhadap nilai encoder yang diperoleh. Berdasakan hasil proses kalibrasi diketahui bahwa terdapat hubungan linier antara posisi sudut roda kemudi yang dibentuk terhadap nilai encoder. Grafik kalibrasi yang telah dilakukan pada roda kemudi dapat dilihat pada Gambar 18.
Sudut roda kemudi bernilai positif ketika posisi roda kemudi ke kanan dan sebaliknya bernilai negatif ketika posisi roda kemudi ke arah kiri. Berdasarkan Gambar 18 diketahui kalibrasi yang dilakukan pada unit pengendali kemudi mendapatkan nilai regresi sebesar 0.9997. Nilai regresi mendekati angka 1 mengindikasikan kesesuaian sudut yang dibuat oleh kemudi dengan pembacaan nilai encoder. Sudut 0o adalah sudut ketika posisi roda kemudi berada pada posisi
lurus. Hasil kalibrasi diperoleh persamaan kalibrasi y = 3.1081x + 113.09 di mana
y merupakan nilai encoder dan x adalah sudut roda kemudi.
Pengendali Akselerator (RPM mesin)
Pedal akselrator digerakkan oleh motor DC 12 V dan dikendalikan oleh
microcontroller dengan arah putaran motor diatur menggunakan H-Bridge.
Gambar 19 Algoritma pengendali akselerasi
26
Input pengendalian berupa RPM mesin yang diinginkan. RPM diatur melalui besar posisi sudut putaran motor.
Posisi sudut putaran motor diukur menggunakan potensiometer yang dihubungkan seporos. Perubahan hambatan potensiometer dikonversi menjadi nilai digital oleh ADC yang terdapat pada microcontroller dan menjadi umpan balik ketercapaian RPM yang diinginkan. Algoritma pengendali akselerator dapat dilihat pada Gambar 19.
Pengendali Tuas Implemen
Tuas implemen digerakkan oleh motor DC 12 V dan dikendalikan oleh
microcontroller dengan arah putaran motor diatur menggunakan H-Bridge. Input pengendalian level ketinggian implemen yang diinginkan. Ketinggian implemen diatur melalui besar posisi sudut putaran motor penggerak. Posisi sudut putaran motor diukur menggunakan potensiometer yang dihubungkan seporos dengan motor penggerak. Perubahan hambatan potensiometer dikonversi menjadi nilai digital oleh ADC yang terdapat pada microcontroller dan menjadi umpan balik ketercapaian level ketinggian implemen yang diinginkan. Algoritma pengendali tuas implemen dapat dilihat pada Gambar 20.
Gambar 20 Algoritma pengendali tuas implemen
Motor berputar ke kiri
Input level tinggi implemen (x)
27
Pengendali Pedal Rem
Masing-masing pedal rem memiliki motor penggerak berupa motor DC 12 V yang dikendalikan oleh microcontroller dengan arah putaran motor diatur menggunakan H-Bridge. Pergerakan rem hanya dikendalikan dalam dua posisi yaitu posisi tertekan penuh dan posisi tidak tertekan sepenuhnya. Sensor yang digunakan berupa limit switch yang akan bereaksi memutuskan suplai arus motor penggerak ketika tertekan. Algoritma pengendali tuas implemen dapat dilihat pada Gambar 21.
Gambar 21 Algoritma pengendali pedal rem
Pengendali Pedal Kopling
Pedal kopling digerakkan oleh motor DC 24 V dan dikendalikan oleh
microcontroller dengan arah putaran motor diatur menggunakan Relay. Input pengendalian pedal kopling ada dua yaitu tertekan penuh atau terlepas penuh. Sensor yang digunakan berupa sensor tekan yang digunakan untuk mengetahui kopling telah tertekan sepenuhnya atau telah terangkat sepenuhnya. Sensor kopling tertekan sensor akan bernilai 0 dan saat kopling telah terangkat sepenuhnya sensor
Ya
Mulai
Input gerakan pedal rem
Pedal rem = turun?
Motor putar kanan
Rem kanan : PORTA.0=1;PORTA.1=0 Rem kiri : PORTA.4=0;PORTA.5=1
Motor putar kiri
Rem kanan : PORTA.0=0;PORTA.1=1 Rem kiri : PORTA.4=1;PORTA.5=0
Motor berhenti
Rem kanan : PORTA.0=0;PORTA.1=0 Rem kiri : PORTA.4=0;PORTA.5=0
Tidak
28
akan bernilai 1. Selain itu, kopling akan bergerak naik jika tuas transmisi telah menekan sensor tekan yang mengisyaratkan tuas transmisi telah bergerak sepenuhnya dalam posisi maju atau mundur. Algoritma pengendali pedal kopling dapat dilihat pada Gambar 22.
Gambar 22 Algoritma pengendali pedal kopling
Pengendali Tuas Transmisi
Tuas transmisi digerakkan oleh motor DC 12 V dan dikendalikan oleh
microcontroller dengan arah putaran motor diatur menggunakan H-Bridge. Input pengendalian pedal kopling ada tiga yaitu maju, mundur, atau netral. Sensor yang digunakan berupa sensor tekan yang digunakan untuk memastikan posisi tuas transmisi berada pada posisi seharusnya Sensor transmisi akan bernilai 0 ketika sensor belum tertekan yang berarti posisi tuas transmisi tidak tepat dan sensor akan bernilai 1 ketika sensor tertekan akibat tuas telah berada pada posisi yang seharusnya. Tuas transmisi hanya akan bergerak jika kopling telah tertekan. Algoritma pengendali tuas transmisi dapat dilihat pada Gambar 23.
29
Gambar 23 Algoritma pengendali tuas perseneling
Pengujian Lintasan Lurus
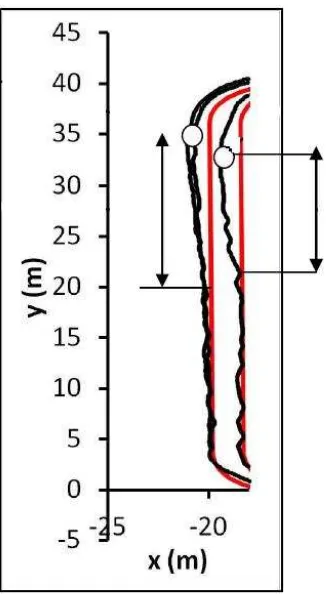
Lintasan acuan diset dari dua titik, yaitu titik awal dan titik akhir. Kedua titik dihubungkan sehingga membuat suatu garis lurus yang menjadi acuan gerak traktor. Panjang lintasan 30 m dan pada kondisi tanah memiliki kadar air 19.88% pada kedalaman 0-5 cm. Traktor berjalan mengikuti garis acuan tersebut sehingga mencapai ujung lintasan. Perbandingan antara pengujian di lapangan dengan simulasi dapat dilihat pada Gambar 24.
Traktor diposisikan pada posisi awal lintasan sebelum memulai pengujian. Penempatan traktor pada posisi titik awal sulit dilakukan, sehingga posisi awal traktor tidak persis sama dengan posisi awal lintasan seperti terlihat pada Gambar 24. Pada Gambar 24 terlihat perbedaan jalur pergerakan antara simulasi dan pengujian lapang, namun keduanya menunjukkan grafik pergerakan yang mirip. Hasil tersebut menunjukkan bahwa algoritma yang dibuat mampu mengendalikan traktor mengikuti lintasan acuan yang telah ditetapkan. Rata-rata jarak perbedaan antara simulasi model dan pengujian lapang yaitu sebesar 13.4 cm. Simpangan posisi traktor pada pengujian lapang terhadap lintasan acuan rata-rata sebesar 8.62
30
cm. Hasil ini lebih baik dibandingkan dengan penelitian sebelumnya (Rahman 2012) yang menghasilkan simpangan rata-rata 12 cm.
Gambar 24 Pengujian pergerakan traktor lintasan lurus pada posisi awal segaris lintasan acuan
Sudut setir merupakan sudut yang dibentuk antara kemiringan roda depan terhadap baris sumbu traktor. Sudut positif terbentuk ketika roda mengarah ke kanan terhadap garis lurus orientasi (arah hadap) traktor dan sebaliknya sudut negatif terbentuk ketika roda mengarah ke kiri terhadap garis lurus orientasi traktor. Gambar 24 juga menunjukkan perbandingan posisi sudut setir selama traktor bergerak sepanjang lintasan acuan. Dapat dilihat bahwa sudut setir pada pengujian lapang tidak membentuk garis yang halus karena roda terus bergerak-gerak. Walaupun sudut setir bergerak-gerak, secara umum terlihat bahwa mengikuti pola grafik sudut setir simulasi. Perbedaan ini disebabkan karena kontrol pergerakan setir menggunakan pengontrolan on-off, sehingga jika diperintahkan untuk bergerak pada posisi yang diinginkan, maka setir akan digerakkan oleh kondisi tanah saat motor pada kondisi off.
31 traktor dipengaruhi oleh sudut setir, namun demikian penentuan nilai koreksi sudut setir dipengaruhi oleh orientasi traktor.
Gambar 25 Pengujian pergerakan traktor dari posisi kanan sejajar lintasan acuan berjarak 5 m
Pengujian lain dilakukan dengan menempatkan traktor pada posisi awal sejauh kurang lebih 5 m di kanan dan di kiri lintasan acuan. Uji ini dilakukan untuk mengetahui bagaimana kemampuan traktor kembali pada jalur lintasan acuan ketika posisinya cukup jauh terhadap lintasan acuan. Gambar 25 memperlihatkan jalur pergerakan traktor dari kanan lintasan acuan kembali pada lintasan acuan dan mengikuti lintasan tersebut menuju titik akhir lintasan. Posisi sudut setir dan orientasi traktor selama pergerakan menuju titik target dapat dilihat pada Gambar 25. Sudut setir selama pergerakan traktor saat pengujian hampir menyerupai sudut setir pada simulasi, namun terjadi keterlambatan pergerakan. Hal yang sama juga terjadi pada orientasi traktor, yang merupakan akibat dari pergerakan setir. Keterlambatan ini disebabkan oleh delay time unit pengendali traktor untuk merespon pembacaan data (Sutiarso et al. 2001). Semua unit pengendali membutuhkan waktu untuk menggerakkan tuas-tuas kemudi.
Hasil yang berbeda ditunjukkan ketika pengujian dilakukan pada posisi awal kurang lebih 5 m di kiri lintasan acuan. Pada Gambar 26 memperlihatkan jalur pergerakan traktor menuju garis lintasan acuan yang bergerak dari kiri lintasan acuan. Dari grafik terlihat pola pergerakan pada awal lintasan sangat berbeda antara pengujian lapang dan hasil simulasi. Traktor bergerak perlahan mendekati lintasan
32
acuan pada pengujian di lapangan sedangkan pada simulasi traktor bergerak lebih cepat menuju lintasan acuan. Walaupun pergerakan awal berbeda, namun keduanya mencapai lintasan acuan secara stabil pada posisi yang sama. Terlihat pada Gambar 26 bahwa sudut setir yang dibentuk di awal pergerakan pengujian lapangan lebih kecil dibandingkan sudut setir yang dibentuk dari hasil simulasi. Hal yang sama juga terlihat pada orientasi traktor pada Gambar 26.
Gambar 26 Pengujian pergerakan traktor dari posisi kiri sejajar linatasan acuan berjarak 5 m
Pada simulasi diasumsikan bahwa lintasan pengujian berupa permukaan yang rata, tidak terjadi slip roda, arah orientasi traktor menunjukkan arah yang benar, dan unit penggerak (aktuator) bekerja dengan baik. Kenyataan kondisi saat percobaan di lapangan tidak sama persis dengan yang diasumsikan dalam simulasi. Pengujian dilakukan pada lahan tanah dengan permukaan yang tidak rata, namun berada pada wilayah datar. Perbadaan kondisi lahan pengujian dengan asumsi memberi pengaruh besar terhadap perbedaan hasil simulasi dan pengujian.
Kondisi tanah yang kering dan tanpa beban implemen menyebabkan slip roda yang terjadi kecil, sehingga tidak terlalu berpengaruh. Arah orientasi dalam penelitian ini yaitu dengan membandingkan dua titik pengukuran posisi traktor dan tidak menggunakan geomagnetic sensor. Perbandingan dua titik koordinat posisi dapat dijadikan penentuan arah orientasi traktor, namun hasil pengukuran ini mempunyai tingkat ketelitian yang lebih kecil dibandingkan dengan menggunakan
geomagnetic sensor. Nagasaka (2004) menggunakan geomagnetic sensor berupa
33 FOG (Fiber Optic Gyroscope) yang memiliki kemampuan mendeteksi sudut dalam tiga koordinat, yaitu yaw, roll, dan pitch angel. Keunggulan penggunaan gyroscope
yaitu mampu mengetahui orientasi traktor dengan akurat dan dapat digunakan untuk mengkoreksi data GPS. Keakuratan RTK DGPS dalam menentukan posisi dapat menyebabkan kesalahan ketika traktor berada dalam posisi miring sehingga dalam posisi tersebut perlu untuk mengkoreksi koordinat posisi GPS.
Pengujian Belok
Pengujian belok dan berbalik arah dilakukan untuk mengetahui kemampuan traktor otomatis berbelok hingga berbalik arah kemudian mundur pada posisi yang siap untuk berjalan pada lintasan selanjutnya. Setelah selesai berjalan pada lintasan lurus atau lintasan olah, traktor berbelok dengan sudut setir maksimum ke lintasan selanjutnya (Nagasaka 2004).
(a) (b)
Gambar 27 Simulasi pemilihan gerakan belok traktor
34
traktor berada pada lintasan acuan yang sesuai dibandingkan dengan berbelok langsung. Sehingga gerakan belok ini dipilih dalam penelitian ini karena lebih sesuai dengan lebar jarak antar lintasan yang lebih kecil dibanding radius belok traktor.
(a) (b)
Gambar 28 Hasil pengujian belok (a) belok kanan, (b) belok kiri Setelah berbelok dan berbalik arah, traktor bergerak menuju lintasan acuan untuk mencapai posisi yang tepat dan orientasi yang benar. Karena posisi tersebut di depan awal lintasan olah salanjutnya, sehingga traktor perlu digerakkan mundur agar ujung awal lintasan tersebut dapat terolah. Dalam penelitian ini belum didapatkan algoritma pengendalian mundur yang tepat dan dapat mengikuti lintasan acuan. Setelah selesai gerakan belok dan berbalik arah diasumsikan traktor berada tidak jauh dari posisi yang seharusnya dan mengarah pada arah yang benar, sehingga gerakan mundur hanya berlangsung lurus dengan posisi sudut setir lurus. Namun yang dikendalikan adalah posisi batas mundur. Ketika traktor berada pada akhir ujung lintasan lurus, traktor tetap dijalankan sejauh 2.7 m sesuai dengan jarak antara antena dan ujung belakang implemen. Hal ini bertujuan agar ujung lintasan dapat terolah sebelum traktor berbelok. Setelah berbalik arah, untuk dapat memposisikan traktor pada lintasan acuan dan arah orientasi yang tepat dibutuhkan jarak 8 m.Kemudian traktor bergerak mundur hingga berada pada jarak 1.5 m di depan titik awal lintasan. Ujung implemen akan berada di belakang titik awal lintasan sehingga diharapkan ketika setelah gerakan mundur traktor tidak berada tepat di jalur acuan maka titik awal lintasan dapat terolah. Gerakan belok untuk berpindah ke lintasan olah selanjutnya dapat dilihat pada Gambar 28.
35
Pengujian Pengolahan Tanah
Pengujian pengolahan tanah dilakukan dengan menggunakan implemen bajak rotari dan bajak piring. Pengujian menggunakan bajak rotari, dilakukan pada lahan dengan kadar air tanah rata-rata 24.75 % pada kedalaman 0-5 cm. Sedangkan pada pengujian bajak piring, dilakukan pada lahan dengan kadar air rata-rata 28.09 % pada kedalam 0-5 cm. Lahan olah yang digunakan berukuran 30 m x 20 m dengan total lintasan 12 lintasan. Pergerakan traktor hasil pengujian lapangan dapat dilihat pada Gambar 29. Gambar 29 menunjukkan bahwa traktor membutuhkan ruang gerak saat melakukan manuver belok.
(a) (b)
Gambar 29 Pergerakan traktor hasil pengujian lapangan, (a) bajak rotari, (b) bajak piring
Adanya ruang gerak yang dibutuhkan traktor dalam melakukan manuver belok menjadikan total luas lahan yang dibutuhkan menjadi 50 x 22 m. Hal ini berarti pada ujung lahan harus tersedia ruang sejauh 10 m untuk memenuhi kebutuhan belok tersebut. Kebutuhan ruang gerak untuk gerakan manuver belok tersebut juga diperlukan pada pengolahan tanah secara manual. Untuk mengatasi masalah tersebut umumnya dilakukan pengolahan tersendiri pada area belok.
Perhitungan simpangan dilakukan pada saat traktor mulai bergerak maju dan setelah bergerak mundur (selain lintasan 1). Berdasarkan hasil perhitungan simpangan pada bajak rotari memiliki simpangan rata-rata 12.7 cm dan simpangan terbesar 18 cm. Hasil ini lebih baik dibandingkan hasil pengujian Rahman (2013) yang memiliki simpangan rata-rata 17.9 cm dengan implemen yang sama. Pengujian pembajakan menggunakan bajak piring memiliki simpangan rata-rata 18.8 cm dan simpangan terbesar 28 cm. Hasil pengujian menggunakan bajak piring menghasilkan simpangan yang lebih besar dibandingkan dengan pengujian menggunakan bajak rotari disebabkan karena pada pengolahan tanah dengan menggunakan bajak piring memiliki gaya ke samping yang dapat menggeser posisi traktor. Untuk mengatasi masalah tersebut perlu ditambahkan pengendalian rem
36
kiri-kanan pada algoritma lintasan lurus. Salah satu tuas rem dapat diaktifkan ketika traktor tidak dapat mencapai posisi seharusnya dalam waktu tertentu meskipun setir telah diputar pada posisi yang tepat. Selain itu, lintasan yang telah dilalui oleh bajak piring akan menghasilkan gundukan tanah dan cekungan yang menyebabkan traktor mengalami kesulitan untuk mencapai lintasan acuan yang benar. Akibat dari gundukan tanah, roda depan traktor sulit untuk menggelinding dan melewati gundukan tanah tersebut sehingga yang terjadi adalah roda menjadi terseret. Kondisi tersebut didukung oleh keadaan tanah yang basah dengan kadar air dan tahanan penetrasi rata-rata 28.09 % dan 16.3 N/cm2. Hal ini membuat simpangan pada pengujian bajak piring karena pola pembajakan continuous yang digunakan tidak tepat. Secara umum pola pembajakan bajak piring menggunakan pola
headland pattern, dimana traktor bergerak dari ujung pinggir lahan ke ujung pinggir lahan pada sisi lain dan berakhir di tengah. Pola ini akan membagi lahan menjadi dua bagian, arah gerak traktor dan pembalikan tanah yang sama untuk masing-masing bagian dan bertemu di tengah lahan. Dengan menggunanakan pola ini dalam proses pembajakan salah satu roda depan diposisikan pada cekungan hasil pembajakan lintasan sebelumnya untuk memastikan semua tanah terbajak. Akibat lebar implemen bajak piring yang lebih kecil dibandingkan lebar lintasan maka terdapat bagian lahan yang tidak terolah seperti pada Gambar 30 (b). Kondisi tanah setelah dilakukan pengujian pengolahan tanah dapat dilihat pada Gambar 30.
(a) (b)
Gambar 30 Lahan hasil pengujian pembajakan, (a) bajak rotari, (b) bajak piring Faktor lain yang menyebabkan terjadinya simpangan, yaitu belum digunakannya geomagnetic sensor dalam penelitian untuk menentukan orientasi traktor dan algoritma pengolahan data GPS yang belum mampu menyusun data GPS yang terpotong. Tidak digunakannya Geomagnetic sensor menyebabkan penentuan orientasi traktor berdasarkan perbandingan dua posisi traktor pada waktu yang berdekatan. Penentuan dengan metode ini sepenuhnya bergantung pada data posisi yang diberikan oleh GPS. Kenyataannya data GPS tidak selalu sempurna dikirimkan dan diterima lengkap dalam satu baris oleh komputer, seperti pada Gambar 31. Pada saat-saat tertentu data GPS dikirimkan tidak dalam satu baris disebabkan karena adanya perbedaan frekuensi pengiriman data oleh GPS dan penerimaan data oleh komputer. Untuk mengatasi hal tersebut, model yang telah dibuat dapat ditambahkan dalam pengolahan data GPS. Model yang telah
Batas pengolahan tanah
37 disimulasikan dapat menduga posisi traktor tersebut ketika pengiriman data GPS terganggu. Selain itu, diharapkan kesalahan dalam penentuan arah orientasi traktor dapat diperkecil.
Gambar 31 Contoh data GPS dalam format “GPGGA”
Berdasarkan hasil pengujian ini, secara umum sistem otomatisasi traktor telah bekerja dengan baik. Traktor dapat mengikuti jalur acuan pada lintasan lurus. Pada saat berbelok dan berpindah lintasan acuan atau berbalik arah traktor tetap mampu mengembalikan posisinya ke jalur acuan yang seharusnya.
SIMPULAN DAN SARAN
Simpulan
Pengembangan sistem pengendali lintasan kemudi traktor otomatis telah berhasil dilakukan. Algoritma pengendali lintasan lurus mampu mengendalikan traktor mengikuti lintasan acuan. Hasil pengujian lintasan lurus di lapangan menunjukkan hasil yang mendekati hasil simulasi. Rata-rata jarak perbedaan antara simulasi dan pengujian lapangan sebesar 13.4 cm untuk pengujian posisi traktor pada posisi segaris dengan lintasan acuan. Pengitungan simpangan juga didapatkan bahwa simpangan traktor pada pengujian lintasan lurus tanpa implemen di lapangan memiliki simpangan rata-rata 8.62 cm. Pengujian dengan posisi awal sejauh 5 m di samping lintasan acuan lurus menunjukkan bahwa traktor dapat kembali pada lintasan yang seharusnya baik pada simulasi maupun pengujian di lapangan.